EPS实车试验辅助测试系统的设计
车辆工程毕业设计51汽车电动助力转向(EPS)系统的设计
目录一、绪论1.1 前言 (1)1.2 EPS的特点 (2)1.3 EPS系统在国内外的应用状况 (3)二、 EPS的基本构造和工作原理2.1 EPS系统结构及其工作原理 (4)2.2 EPS的关键部件 (5)2.2.1 扭矩传感器 (5)2.2.2 电动机 (6)2.2.3 电磁离合器 (6)2.2.4 减速机构 (7)2.3 EPS的电流控制 (7)2.4 助力控制 (8)2.5 回正控制 (9)2.6 阻尼控制 (9)三、EPS系统电机驱动电路的设计3.1 微控制器的选择 (10)3.2 硬件电路总体框架 (10)3.3 电机控制电路设计 (11)3.3.1 H桥上侧桥MOSFET功率管驱动电路设计 (12)3.3.2 H桥下侧桥MOSFET功率管驱动电路设计 (13)3.4蓄电池倍压电源 (14)3.5电机驱动电路台架试验 (15)3.6 结论与展望 (16)四、电动助力转向系统故障自诊断的研究4.1 故障自诊断的基本原理 (17)4.2 电动助力转向系统故障自诊断 (17)4.2.1 系统各组成部件的故障辨识 (17)4.2.2 转矩传感器故障自诊断 (18)4.2.3 电机故障自诊断 (20)4.2.4 车速和发动机转速信号故障自诊断 (21)4.2.5 电磁离合器故障自诊断 (22)4.2.6 控制单元电源线路故障自诊断 (22)4.2.7 控制单元故障自诊断 (23)4.3 故障代码显示控制及安全防范措施 (23)4.4 实例分析 (26)4.5 结束语 (27)致谢 (27)汽车电动助力转向(EPS)系统的设计绪论1.1前言转向系统作为汽车的一个重要组成部分,其性能的好坏将直接影响到汽车的转向特性、稳定性和行驶安全性。
汽车助力转向依次经历了机械式转向系统、液压式转向系统、电控液压式转向系统等阶段,国际上已有一些大的汽车公司在探讨开发的下一代线控电动转向系统。
在国外,各大汽车公司对汽车电动助力转向系统(Electric power steering-EPS,或称Elec-tric Assisted Steering-EAS)的研究有20多年的历史。
EPS试验台模糊PID控制器设计

’ I NB ’ 式 的 模糊 控 制 规 则 共计 4 KD’S’ 形 9条 。调 试 过程 中 ,可 根 据实 际情 况 对 某 条模 糊 规 则 进 行
调整 。
() C () d
=
改 为模糊 PD 控 制算 法 。 I
1 E S P 试验台 系统构成
E S试 验 台主 要 由液 压 伺 服 系统 、测控 系统 、 P
A ,后 十A P尼 +A D | u() u () u () ] }
电控 系统 和机 械 系统组 成 。
液压 伺服 系统作 为整 个测 试 系统 的动 力来 源 和
P +模 糊 I +模糊 D 控制 器 构成 的 模糊 PD 控制 器 , I
控 制 器 的输 入 和 输 出分 别 为 e 和 、A e和 h
D s n r进 入 模糊 逻辑 的图形 设置 界 面进 行输 入 、 ei e, g
输 出变 量论 域 范 围和 各 变 量 隶 属 函数 以 及 模 糊规 则 的设计 ,步骤 如下 : 1 糊控 制 器 采 用 “ 输 入 三 输 出”形 式设 )模 二
D i1 .9 9 Jis .0 9 0 4 2 1 .2 下 ) 0 o : 3 6 / . n 1 0 - 1 .0 11 ( .1 0 s 3
0 引言
E S试 验 台是 为 了 测 试 E S的 性 能 参 数 等 而 P P
部 分 的主程 序基于 N aV E 编写 ,主要 实现数 I b IW L 据 采 集和发 生 、执 行元件 控制 、数据 分析 、人机 交 互 、数 据记 录和状 态监控 等操 作 。数 据的采 集和发 生 使 用 NI P I 2 1 P I 6 1多功 能 数 据 采 的 C- 2 和 C一 0 6 6 集卡 。E S试 验 台硬 件 系统 组成如 图 1 示。 P 所
汽车 EPS 试验台的设计及试验研究

汽车 EPS 试验台的设计及试验研究随着汽车行业的不断发展,其安全性越来越得到广泛的关注,电动助力转向系统(EPS)作为安全的重要保障,日益得到广泛的应用。
为了确保EPS在汽车中的稳定性和可靠性,在其研发和设计阶段需要进行严谨的试验和研究。
因此,本文设计了一种汽车EPS试验台,并进行了试验研究,旨在为EPS的研发提供可靠的基础数据。
一、汽车EPS试验台设计1.试验框架结构设计试验框架结构主要由试验用台架、试验悬挂系统、EPS测试系统组成。
台架为I型钢焊接而成,尺寸为1500mm*1500mm*1500mm。
试验悬挂系统采用四柱式气动拉杆,并配备防震圆片。
EPS测试系统由EPS测试台、EPS调制电源、电压表组成。
2.试验系统设计EPS测试台由测试工位,操纵机构,转向轮和传感器等组成。
测试工位上设有反力装置,可减小EPS系统的负荷。
操纵机构采用机械操纵和电子操纵两种方式,能够通过转向轮对EPS 进行控制。
传感器采用离子钠级别的压电传感器和光学传感器,可对试验数据进行采集和处理。
EPS调制电源主要是对EPS系统进行电气测试时所采用的电源,可承受EPS测试过程中的高电压电流。
电压表主要用于测试EPS系统的电压。
二、试验研究为了检测EPS系统在不同环境中的性能表现,我们针对EPS 的转弯力矩、电机功率、功率因数、噪音和振动等参数进行了试验研究。
1.转弯力矩试验通过对EPS系统进行不同强度的转弯,比较输出力矩,得到EPS的转弯力矩曲线。
测试结果表明,EPS的转弯力矩主要受到转弯角度和EPS系统的真实负载等因素的影响,实验数据可用于优化EPS转向系统的控制算法。
2.电机功率试验在不同的速度下,对EPS系统功率进行试验研究,掌握其转向过程中的功率消耗情况。
实验结果表明,EPS的运行效率受到不同运行状态、动力负载以及环境温度的影响,功率消耗也存在明显差异。
3.功率因数试验在不同电压下,对EPS系统的功率因数进行试验研究。
基于虚拟仪器的EPS用感应电机测试系统

K e o ds Vi ua n t me t I du to oo ; EPS; Te t yW r : t r li sr u n ; n ci n m t r s
id c o o r a tesei e o nei e c i pw r te n ytm ( hr f P ) h s ss n ut n m t s h pca pr r c l t c o e er gss i oh l f ma n e r s i e soto E S .T et t y・ r e
Absr c t a t: P tfr r nd o e ts se b s d o it a nsr u o wa d a ki fts y tm a e n v ru li tume tt ov h r b e t a he ta i n o s l e t e p o lm h tt r d — t n lmo o e ts se ha h i tto fl n i i a tr ts y tm s t e lmiai n o o g tme—c ns o o umi g,t do s p o e s a d lw r c so n n e iu r c s n o p e iin a d
应电机的特殊性能 ,该文介绍 了一种 以 P c机为 主控单元 ,采用 P I 0 2 C 一65 E数据 采集 卡 ,以 L b IW 为软件开 发 a VE 平 台设计 的专 门针对 E S用感应电机的测试系统 ,详细介绍 了测试 系统硬件平 台和软件设计 ,实验证 明该测试 系统 P 完全可行 。系统硬件结构 简 单 ,拥 有较 高 的可 靠性 和测量 精 度 ,为 E S用 助 力 电机 的测 试 系统 设计 提 供 了重 要 P
基于STM32f103C8微控制器的EPS电机测试系统设计

De s i g n o f EPS Mo t o r Te s t S ys t e m Ba s e d o n STM 3 2 f 1 0 3 C8 Mi c r o c on t r ol l e r
J i n Ch e n g
( S c h o o l o f Me c h a n i c a l a n d A u t o m o t i v e E n g i n e e i r n g , H e f e i U n i v e r s i t y o f T e c h n o l o g y , H e f e i C i t y , A n h u i P r o v i n c e 2 3 0 0 0 9 , C h i n a )
[ 摘要 ] 设计 了一种 E P S助力电机控制程序有效性的测试 系统 , 该 系统采用 J N 3 3 8 传感器采集电机转矩及转 角
信号 , 使用S T M3 2 f 1 0 3 C 8微控制 器对传感器输 出信号进行 处理 , 并将数据通过 C A N — B U S传送至计算机进行分 析 。通过试验验证 , 该 系统工作正常, 而且精度较 高。 [ 关键词 ] S T M3 2 f 1 0 3 C 8 ; 电动助力转向系统 ; J N 3 3 8 [ 中图分类号 ]U 4 6 3 . 4 6 [ 文献标志码 ] A [ 文章编号 ]1 6 7 3 — 3 1 4 2 ( 2 0 1 3 ) 0 5 — 0 0 5 0 — 0 4
[ Ke y wo r d s ]S T M3 2 f 1 0 3 C 8 ; e l e c t i r c p o w e r s t e e i r n g s y s t e m; J N 3 3 8
EPS控制器设计匹配及使用

EPS控制器设计匹配及使用EPS(Electric Power Steering,电动助力转向)是现代汽车中常见的转向系统之一,使用电动机代替液压提供转向助力。
EPS控制器设计的目标是提供准确、稳定和安全的转向助力,并满足各种驾驶条件下的需求。
EPS控制器的设计首先需要考虑的是系统的传感器和执行器,它们用于感知车辆的转向状态和提供相应的助力输出。
常见的传感器包括转向角传感器、转向助力传感器、转向速度传感器等,而执行器则是电动助力转向电机。
这些传感器和执行器需要与EPS控制器进行匹配,在设计时需要考虑它们之间的兼容性和通信协议。
另外,EPS控制器还需要具备一定的控制策略,用于根据传感器的输入数据来实现转向助力的输出。
常见的控制策略包括基于模型的控制方法和基于经验的控制方法。
基于模型的控制方法使用数学模型描述转向系统的动态特性,通过调节控制器参数来实现期望的转向助力输出。
而基于经验的控制方法则是根据实际测试数据和经验公式来设计控制逻辑。
在设计控制策略时需要考虑车辆的稳定性、安全性以及驾驶员的操控感受。
此外,EPS控制器还需要考虑故障检测和容错机制。
由于EPS系统的重要性,一旦发生故障可能会对车辆的操控造成严重影响。
因此,EPS控制器需要具备故障检测和容错机制,能够及时检测系统故障并采取相应的措施来保证车辆的安全性。
最后,EPS控制器的设计还需要考虑系统的可扩展性和性能优化。
随着汽车技术的不断发展,EPS系统也在不断进化,新增了许多功能和特性。
因此,EPS控制器需要具备一定的可扩展性,能够适应新的需求和功能的添加。
此外,为了提高系统的性能,EPS控制器还需要对计算能力、响应时间等指标进行优化。
在使用EPS控制器时,需要根据车辆型号和具体需求进行配置和调试。
首先,需要根据车辆的驾驶条件选择合适的控制策略和参数设置。
然后,将EPS控制器与传感器和执行器进行连接,确保其正常工作。
最后,进行相关的调试和测试,包括转向助力输出的准确性、稳定性和安全性等方面的验证。
EPS跑偏补偿功能系统匹配实验研究

10.16638/ki.1671-7988.2019.13.036EPS跑偏补偿功能系统匹配实验研究周锦鸿,黄乾生(博世华域转向系统有限公司,上海201800)摘要:文章对电动助力转向系统(EPS)跑偏补偿功能(PDC)的系统匹配实验详尽研究,对相关实验方法、实验条件、实验流程以及接受标准进行分析,总结出了一系列符合开发需求的方法与标准。
对今后跑偏补偿功能乃至其它驾驶辅助高级功能的系统匹配实验具有借鉴意义。
关键词:EPS;跑偏补偿功能;系统匹配实验中图分类号:U463.4 文献标识码:A 文章编号:1671-7988(2019)13-104-02A study of system matching experiment for EPS Pull Drift Compensation functionZhou Jinhong, Huang Qiansheng(Bosch HUAYU Steering Systems Co., Ltd., Shanghai 201800 )Abstract:In this paper, the system matching experiment of the Pull Drift Compensation(PDC) function of Electric Power Steering(EPS) is studied in detail. The relevant experimental methods, experimental conditions, experimental process and acceptance criteria are analyzed, and a series of methods and standards that meet the development requirements are summarized. It can be used for reference in the future system matching experiments of Pull Drift Compensation function and other advanced driving assistance functions.Keywords: Electric power steering; Pull Drift Compensation; System matching experimentCLC NO.: U463.4 Document Code: A Article ID: 1671-7988(2019)13-104-02引言现如今,为了便于道路积水的排出,道路设计通常是中间高而两边低。
双工位汽车EPS控制器性能测试台的设计

10.16638/ki.1671-7988.2017.14.031双工位汽车EPS控制器性能测试台的设计阳鹏,王琳(中国汽车工程研究院重庆凯瑞汽车试验设备开发有限公司,重庆401122)摘要:针对汽车EPS控制器性能测试的需求,开发了一种双工位EPS控制器在线性能测试台。
基于NI公司的PCI控制卡及其LabVIEW 软件平台所设计的测控系统具有数据采集、信号发生、信号控制、数据分析、自动判断功能。
实现了EPS控制器的自动化高效在线检测。
该测试台成功地应用于多家公司的EPS控制器生产线,实际验证表明其性能好、功能全、效率高。
关键词: 电动助力转向系统;EPS控制器;性能测试台中图分类号:U462.1 文献标识码:A 文章编号:1671-7988 (2017)14-90-03Design of performance test bench for EPS controller of duplex stationYang Peng, Wang Lin( China Automotive Engineering Research Institute, Chongqing CAERI Automobile Test EquipmentDevelopment Co.,td, Chongqing 401122 )Abstract: Aiming at the requirement of EPS controller performance test, a dual-position EPS controller on-line performance test bed was developed. Based on NI's PCI control card and its LabVIEW software platform designed and controlled system with data acquisition, signal generation, signal control, data analysis, automatic judgment function. To achieve the EPS controller automation and efficient on-line detection. The test bench successfully applied to a number of companies EPS controller production line, the actual verification shows that its performance is good, full-featured, high efficiency. Keywords: Electric power steering system; EPS controller; Performance test benchCLC NO.: U462.1 Document Code: A Article ID: 1671-7988 (2017)14-90-03引言电动助力转向系统EPS(electric power steering)是一种机电一体化的智能转向助力系统,该系统能根据车辆的运动状况和驾驶员的要求实行多目标控制,能在各种行驶工况下提供最佳助力,改善汽车的转向特性,提高汽车的主动安全性,其节能环保、安装布置灵活,已成为乘用车的主流配置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电流传感器:用来测量流过助力电机的电流大 小.测试系统中采用霍尔电流传感器,精度O.5 %,供电电压范围3—32 V,固定电压增益20,工 作温度范围一40℃~85℃.
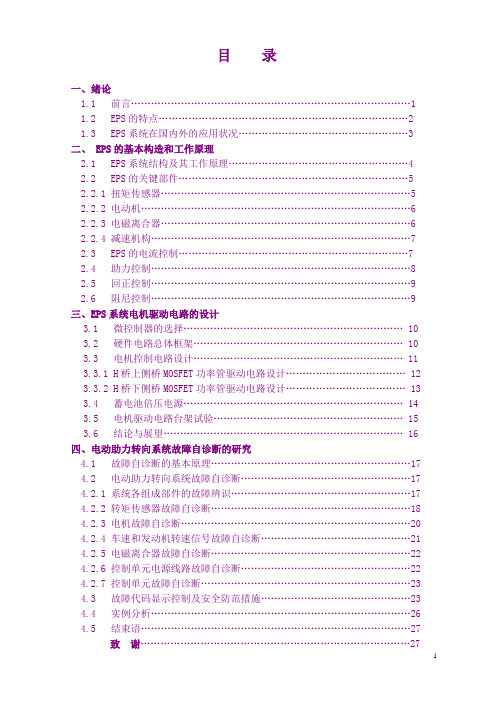
扭矩传感器:用来测量驾驶员作用在转向盘上 的力矩大小与方向.目前EPS采用的扭矩传感器 主要有接触式和非接触式两种形式.本系统采用的 是转向管柱自带的接触式扭矩传感器.图2为选用
图6 自主研发和原车EPS控制器助力特性(车速为0)
5 结论
该系统具有操作简便、快速、界面友好、运行 可靠、测试成本低等优点,可以根据测试数据调整 EPS控制策略.经过实际应用,EPS系统可以满足 实车道路试验的数据采集需要,具有一定的理论研 究和实际应用价值.
江苏大学学报(自然科学版),2004,25(2):116—
收稿日期:2007一10一ll 作者简介:刘峰(1982一),男,硕士生;丁能根(1965一),男,博士,副教授
万方数据
车辆与动力技术
2008年
能测试试验系统,并对其进行了性能试验研究.实 际的测试和使用表明,该测试系统可以满足EPS 实车道路试验的数据采集需要.
1试验系统原理
为了验证所设计EPS系统的助力特性,实车 试验是一个很重要的环节.本文建立的试验辅助测 试系统是在试验台架和实车上都能方便使用的测试 系统.主要由装有EPS控制器的试验车(经过改 装)、电流传感器、扭矩传感器、数据采集板、上 位机程序等5部分组成.试验系统总体框图如图
参考文献: [1] 季学武,马小平,陈奎元.EPS性能试验研究[J].
万方数据
EPS实车试验辅助测试系统的设计
作者: 作者单位:
刊名: 英文刊名: 年,卷(期): 引用次数:
刘峰, 丁能根, 余贵珍, 葛尧, LIU Feng, DING Neng-gen, YU Gui-zhen, Ge Yao 刘峰,丁能根,余贵珍,LIU Feng,DING Neng-gen,YU Gui-zhen(北京航空航天大学汽车工程系 ,北京,100083), 葛尧,Ge Yao(北京恩吉威机电科技发展有限公司,北京,100069)
电动助力转向系统助力转矩的控制….在EPS的 自主研发和测试过程中,有必要设计这样一个数据 采集系统:用单片机采集传感器数据,通过通讯接 口将采集的数据传输到上位机中进行处理并实时显 示,同时将采集的数据按照预先设定的格式保存, 以备离线使用.本文运用单片机设计了数据采集 板,用VB6.0软件编制了数据采集程序,设计了 一种在试验台架和实车上都能方便使用的EPS性
4实车试验结果分析
由于台架试验无法精确的模拟行驶路况,所以 采用经过改装过的试验车来分别测试原车EPS控 制器和自主研发EPS控制器.
试验目的是通过车辆原地转向测试和车辆行驶 过程转向测试,分别得出两个控制器的助力特性曲 线.试验在普通柏油路面上进行,测试时,方向盘 旋转的次序为:平衡位置一右极限位置一平衡位置 一左极限位置一平衡位置.
119.
[2] MOTOROLA公司.MC68HC908GP32 Advanced Infor- mation[Z],2000.
[3]王静掌.Visual Basic6.0实用技术开发指南[M]. 西安:西安电子科技出版社,1999.
[4] 林逸.电动助力转向系统专项性能的客观评价 [J].农业机械学报,2003,34(4)4—7
器(SCCl、SCC2、SCC3)、两个状态寄存器(SCSl、
SCS2)、一个数据寄存器(SCDR)、一个波特率寄
存器(SCBR)心J.利用这些寄存器可以控制SCI的
工作方式和波特率,如下程序段为SCI模块和波特
率的配置:
//设置8ci通讯相关寄存器
SCBR=0x30;
//设置波特率寄存器,
波特率为9600(b/s)
的扭矩传感器的输出特性.该传感器的输出特性呈 良好的线性,转向盘在中间位置时,传感器的输出 为2.5 V;转向盘转到左、右极限位置时,传感器 的输出分别为0.9和4.1 V.EPS控制器可根据转 矩传感器输出电压的大小(=2.5、>2.5、<2.5) 判断是否进行转向及其转动方向.
2 3 4 5 8 9 10 7
Mr.Yao Ge2
(1.Beijing University of Aeronautics and Astronautics,Beijing 100083,China;2.NGV—Beijing Mechanical& Electronic Technology Co.,Ltd,Beijing 100069,China)
因为车辆行驶过程方向盘的大转角有一定的危 险性,所以系统采用单片机模拟发动机转速和车速 信号,来达到模拟实际行驶工况的目的.这样测试
万方数据
·34·
车辆与动力技术
2008经
系统就可以方便的采集到不同车速下的扭矩、电流 信号、助力特性曲线.
图5原车EPS控制器实时波形显示
图5为原车EPS控制器方向盘向右打时随机 采集到的实时波形显示,曲线①为扭矩信号曲线, 曲线②为电流信号曲线,从图中可以看出EPS控 制器能实现助力电机较好的跟随性,这与实际的驾 驶感受相同.
图6为自主研发控制器和原车控制器在车速为 0时的助力特性.从图中可以看出自制控制器和原 车控制器在扭矩值、电流值大小、死区大小、对称 性方面有一些差距.可以利用测试系统采集的试验 数据对控制器控制参数进行修改,提高EPS控制 器的控制效果.用同样的方法得到在不同车速下自 主研发和原车控制器的助力特性.
2.4下位机软件设计
下位机软件使用C语言编写,主要包括系统
主程序、系统初始化子程序、中断子程序、AD转
换子程序、SCI通讯子程序.中断子程序的主要功
能是:定时2 1118将标志位置1.主程序流程如图3
所示.
伍蔬 (单片机初始化)
开中断
·33·
④踮 ≮要步气
上型标志位置o l
电流、扭矩l 信号AD转换l
2008年第2期
车辆与动力技术
Vehicle&Power Technology
文章编号:1009—4687(2008)02—0031—04
总第110期
EPS实车试验辅助测试系统的设计
刘 峰1, 丁能根1, 余贵珍1, 葛 尧2
(1.北京航空航天大学汽车工程系,北京100083;2. 北京恩吉威机电科技发展有限公司,北京100069)
Abstract:To finish vehicle road experiment of EPS,An EPS assistant testing system is proposed in this
paper,and with giving hardware project and corresponding software chart.The system can receive signals of the progress of EPS control,which can help amending control strategy.These signals were send to PC by SCI method.Complied a software in PC,it displays real time shape,saves receive data and displays
图4数据采集流程图
3.2数据处理和实时波形显示
用串口进行数据采集时,由于采样数据量较 大,同时要保存所采集数据,所以在实时显示波形 时,会出现较大的延迟.为了得到实时性较好的波 形,需要对采集数据进行处理。首先,采用定时器 将一定时间间隔内采集到的数据存储到文件名固定。 的txt文件中,同时将存储采集数据的缓冲区清零, 以便接收新的数据;其次,减少有效数据的接收, 每接收到5组数据只有一组数据被存储、实时显 示.这样在内存中的数据量是一个确定的值,不会 耗费太多的内存,从而影响实时性.经过实验验 证,这样既能采集到满足要求的数据又能保证波形 具有很好的实时性.
3.1数据采集
在EPS开发和测试试验项目中,最关键的试 验之一是方向盘扭矩/电机电流关系特性试验,即 助力特性测试试验[4】.为此,本系统最重要的功 能就是通过下位机采集扭矩传感器的扭矩值和助力 电机的电流值,把经过A/D转换的数字信号通过 SCI发送到上位机,上位机界面将接收到的数据显 示成实时波形。并存储接收到的数据,以便做精确 的分析,根据分析来调整控制策略,完成EPS的 开发.图4所示为数据采集流程图.
saved shape and SO on.The system is able to satisfy the need of EPS vehicle road experiment.
Key words:electric power steering system;torque sensor;assistant characteristics;testing system
转据传感器输出电压(v) 主系统:3.4辅助系统:8-9
·
) 4.1k / ,1
4
3/
09\彳 \ 2·5、,
..c’1.
.
10 8 6 4 2 0 2 4 6 8 10
左旋扭杆的扭转角P) 右旋
图2扭矩传感器输出特性
2.3串行通信
MC68HC908GP32内含串行通信接口SCI,支
持高速异步的全双工通信功能.它有3个控制寄存
摘要:为完成电动助力转向系统(EPS)的实车道路试验,设计了EPS辅助测试系统,包括测试系统的硬件设 计方案和软件实现方法.利用该测试系统可以采集EPS控制过程中各种信息,为EPS控制策略和控制参数的修改 提供依据.数据由基于MC68HC908GP32单片机的数据采集板采集后,以SCI方式发送到上位机.在上位机编写 了用户操作界面,可实现实时波形显示、数据存储、历史波形回放等功能.使用结果表明,该系统满足EPS实车 道路试验的数据采集需要.