第8章 塑性变形
第8章工程材料强化与韧化的主要途径PPT课件

●细晶强化还受温度影响。
一般来说,高于1/2T溶时,晶界滑动成为材料形变的重要组成部分。 晶粒越细,单位体积内晶界面积越多,越容易滑动 ,这就导致高
温下细晶材料反比粗晶材料为软。
因此,高温合金一般希望获得粗晶组织。
●生产中细化晶粒的一些途径: 例如,对铸态使用的合金—— 可通过合理控制合金的熔炼和铸造工艺来细化晶粒, 如增大过冷度、加入变质剂、进行搅拌或振动凝固等; 对热轧或冷变形后退火使用的合金—— 可通过控制变形度、再结晶退火的温度和时间来细化晶粒; 对热处理强化使用的合金—— 可通过控制加热和冷却工艺参数,利用相变重结晶来细化晶粒。
位错的运动; ✓ 溶质原子常常被吸附在位错线的附近,降低了位错的能量,阻碍其运动。 固溶强化的影响因素 ✓ 溶剂原子与溶质原子的直径、电化学特征等的差异 ✓ 固溶体的类型
✓ 溶质的加入量 △σss = 2△τss = ΣΚiСi
● 几乎所有对综合力学性能要求较高的结构材料都是以固溶体作为最主要的 相组成物.
概念:金属材料在再结晶温度以下塑性变形(冷塑性变形)时强度和硬度升 高,而塑性和韧性降低的现象,称冷变形强化或加工硬化。
冷变形强化的原理 金属在塑性变形过程中,晶粒破碎、晶格扭曲的程 度不断加重,位错密度不断增加,使得弹性应力场不断增大,位错间的交 互作用不断增强。因而,位错运动的障碍越来越多、阻力越来越大,导 致位错的运动越来越困难,这时需要更大的力才能克服障碍而使位错运 动或产生新的位错,从而使材料的强度、硬度增加。
8.2.4 第二相强化(分散强化)
概念 通过基体中分布细小弥散的第二相粒子(质点)而产生强化 的方法,称为第二相强化或分散强化。 第二相粒子强化比固溶强化的效果更显ห้องสมุดไป่ตู้,但对塑性、韧性产
第八章-滑移线
第8章 滑移线理论及应用§8. 1 平面应变问题和滑移线场滑移线理论是二十世纪20年代至40年代间,人们对金属塑性变形过程中,光滑试样表面出现 “滑移带”现象经过力学分析,而逐步形成的一种图形绘制与数值计算相结合的求解平面塑性流动问题变形力学问题的理论方法。
这里所谓“滑移线”是一个纯力学概念,它是塑性变形区内,最大剪切应力max (τ)等于材料屈服切应力(k )的轨迹线。
对于平面塑性流动问题,由于某一方向上的位移分量为零(设du Z =0),故只有三个应变分量(x d ε、y d ε、xy d γ),也称平面应变问题。
根据塑性流动法则,可知p m y x Z -==+==σσσσσ2/)(2 (8-1)式中,m σ为平均应力;p 称为静水压力。
根据塑性变形增量理论,平面塑性流动问题独立的应力分量也只有三个(x σ、y σ、xy τ)(见图8-1a ),于是平面应变问题的最大切应力为:2231max ]2/)[(2/)(xy y x τσσσστ+-=-= (8-2)可见,这是一个以max τ为半径的圆方程,这个圆便称为一点的应力状态的莫尔圆(见图8-1c )。
图中设x σ<y σ<0(即均为压应力,因塑性加工中多半以压应力为主)。
值得注意的是绘制莫尔圆时,习惯上规定:使体素顺时针旋转的切应力为正,反之为负。
因此图8-1c 中的yx τ为正值;而xy τ取负值。
根据平面流动的塑性条件,k =max τ(对Tresca 塑性条件2/T k σ=;对Mises 塑性条件3/T k σ=.于是,由图8-1(C)的几何关系可知,有 Φ--=2sin k p x σΦ+-=2sin k p y σ (8-3)Φ=2cos k xy τ式中,)2/)((y x m p σσσ+-=-=——静水压力Φ——定义为最大切应力)(max k =τ方向与坐标轴Ox 的夹角。
通常规定为Ox 轴正向为起始轴逆时针旋转构成的倾角Φ为正,顺时针旋转构成的倾角Φ为负(图8-1中所示Φ均为正)。
第8章 金属高温下的变形与断裂
8
9
典型的蠕变曲线
金属蠕变过程用蠕变曲线来描述。 金属蠕变过程用蠕变曲线来描述。典型的蠕变曲线如图。 (1)Oa线段:是试样在t 温度下承受恒定拉应力σ时所产 线段: 线段 生的起始伸长率δq。 若应力超过金属在该温度下的屈服强度,则δq包括弹性伸长 弹性伸长 塑性伸长率两部分。 率和塑性伸长率 塑性伸长率 此应变还不算蠕变 应变还不算蠕变,而是由外载荷引起的一般变形过程。 应变还不算蠕变
20
(二)扩散蠕变
(二)扩散蠕变 扩散蠕变: 扩散蠕变:是在较高温度(约比温度(T/Tm)远超过0.5)下的 ( 一种蠕变变形机理。 它是在高温下大量原子和空位定向移动造成的 高温下大量原子和空位定向移动造成的。 高温下大量原子和空位定向移动造成的 在不受外力情况下,原子和空位的移动无方向性,因而宏观 上不显示塑性变形。 但当受拉应力σ作用时,在多晶体内产生不均匀的应力场 产生不均匀的应力场。 产生不均匀的应力场
17
刃位错攀移克服障碍的几种模型: 刃位错攀移克服障碍的几种模型: 可见,塞积在某种障碍前的位错通过热激活可以在新的滑移 面上运动(a),或与异号位错相遇而对消(b),或形成亚 晶界(c),或被晶界所吸收(d)。
18
当塞积群中某一个位错被激活而发生攀移时,位错源便可能 再次开动而放出一个位错,从而形成动态回复过程 动态回复过程。 动态回复过程 这一过程不断进行,蠕变得以不断发展。
7
本章介绍内容: 本章介绍内容: 阐述金属材料在高温长时载荷作用下的蠕变现象 蠕变现象。 蠕变现象 讨论蠕变变形和断裂的机理 蠕变变形和断裂的机理。 蠕变变形和断裂的机理 介绍高温力学性能指标及影响因素。 为正确选用高温金属材料和合理制定其热处理工艺提供基础 知识。
《金属学原理》各章习题及解答(晶体的塑性变形)
第8 章晶体的塑性形变题解1. 细铜棒两端固定,从100°C 冷却到0°C,问发生的内应力有多大?铜的热膨胀系数=1.5×10-6/°C,弹性模量E=1.103×1011 Pa)。
解:设棒长为 1 ,热膨胀系数α=1.5×10-6/°C ,从100°C 冷却到0°C 棒收缩量∆L=α∆T=1.5×10-6×100=1.5×10-4,如果棒仍保持弹性范围,根据胡克定律,内应力σ应为:σ=Eε=1 ×11 ××−4 =×7.103 10 1.5 10 Pa 1.65 10 Pa2. 板材轧制时,设弹性变形量从表面到中心是线性的。
(a)压下量不大时,表面仍处在弹性范围,画出加载及卸载时从表面到中心的应力分布;(b)表面发生了塑性形变,但中心仍处于弹性围,画出加载及卸载时从表面到中心的应力分布。
解:(a)当压下量不大表面仍处在弹性范围时,因表面变形量最大,所以整个板处于弹性范围,加载时,应力与应变正比,所以应力从表面到中心亦呈线性分布,如下图(a)所示。
卸载后,弹性应变完全回复,板内无应力存在。
(b)当表面发生了塑性形变但中心仍处于弹性围时,表面层已屈服,它的应力与应变关关系不再符合胡克定律,所以表层应力的增加斜率降低,如下图(b)所示;卸载后,表层的塑性形变不能回复,内部的弹性变形要回复,因此,表层受内部收缩而产生压应力,因表层留下的永久变形不能回复而使内部产生拉伸应力,这些残余应力的分布如下图(c)所示。
3. 体心立方晶体可能的滑移面是{110}、{112}及{123},若滑移方向为[111],具体的滑移系是哪些?解:一个具体的滑移系的滑移方向必在滑移面上,根据晶带定律可知,滑移方向为[111] 时,对于{110}滑移面,可能的滑移面是(110)、(011)和(101 )。
第8章材料的变形与断裂

第8章材料的变形与断裂材料的变形与断裂是材料科学中的重要研究内容,对于了解材料的性能和使用寿命具有重要意义。
材料的变形是指在外力作用下,材料的形状、尺寸或结构发生改变的过程。
而断裂则是指在外力作用下,材料由于受到极限载荷或破坏源的影响,导致形成裂纹最终导致材料的破裂。
材料的变形可以分为弹性变形和塑性变形两种情况。
在小应力作用下,材料会发生弹性变形,即在去除外力后能够恢复其原状。
而在大应力作用下,材料会发生塑性变形,即即使去除外力,材料也无法完全恢复其原状。
材料的弹性模量是一个衡量材料抗弹性变形能力的重要参数,不同材料具有不同的弹性模量,常见材料如金属具有较大的弹性模量,而聚合物则具有较小的弹性模量。
材料的塑性变形是材料工程中非常重要的一个特性,塑性变形不仅与材料的力学性能有关,还与材料的微观结构和晶格缺陷等因素有关。
材料在塑性变形过程中会产生塑性应变和塑性应力,塑性应变是材料发生塑性变形时所引起的应变,而塑性应力则是材料发生塑性变形时所引起的应力。
常见的材料塑性变形包括屈服、流动、硬化等过程。
材料的断裂是指在外力作用下,材料发生了破裂。
材料的断裂主要分为两种形式:韧性断裂和脆性断裂。
韧性断裂是指材料在外力作用下具有一定韧性,在发生破裂前能够发生大量的塑性变形。
而脆性断裂则是指材料在外力作用下没有发生明显的塑性变形,很快发生破裂。
韧性断裂常见于许多金属材料,而脆性断裂则常见于一些玻璃、陶瓷等材料。
材料的断裂形式可以通过断口分析来确定。
不同的断口形式对应着不同的材料断裂机制。
常见的断裂形式有拉断、韧窝断裂、脆窝断裂等。
拉断是指材料发生拉伸断裂,断口两侧平整光滑,常见于高强度的金属材料。
而韧窝断裂则是指材料发生韧性断裂,断口两侧有明显的韧窝。
脆窝断裂则是指材料发生脆性断裂,断口两侧有明显的断裂窝。
通过对断口形态的观察可以判断材料的断裂机制和断裂韧性。
材料的变形和断裂不仅仅涉及到力学性能的研究,还和材料的制备工艺、微观结构、晶体缺陷、应力和温度等因素有关。
大学材料科学基础第八章材料的变形与断裂(1)

六方晶系则需画图判定。
滑移系数量与金属的塑性 滑移系代表了晶体滑移时可能采取的空间取向,晶 体中滑移系数量越多,滑移时可能采取的空间取向就 越多,滑移就越容易进行,金属的塑性便越好。 面 心 立 方 金 属 : Cu,Al,Au,Ag,,Ni,γ-Fe, 奥氏体钢,体心立方金属α-Fe,铁素体,Mo,Nb的 塑性很好,而密排六方金属Mg,Zr,Be,Zn的塑性 则较差。当然滑移系数量并不是决定金属塑性高低唯 一的因素,合金的成分、强度的高低、加工硬化的能 力等也会影响到金属的塑性。试验表明,奥氏体钢的 塑性要优于铁素体钢。
金属拉伸曲线分析。 1 弹性变形阶段:ζ-ε呈直线关系。
(弹)塑性变形阶段: ζ-ε不遵循虎克定律
2 均匀塑性变形阶段:屈服阶段:ε增加,ζ基本保 持不变, ζ-ε呈非线性关系。 3 颈缩阶段(局部变形阶段):变形集中在局部区 域。 4 断裂阶段:从颈缩到断裂。
拉伸试验可以得到以下强度指标和塑性指标:
拉伸条件下滑移系上分切应力的计算。
(c)2003 Brooks/Cole, a division of Thomson Learning, Inc. Thomson Learning ™ is a trademark used herein under license.
θ-滑移面法线与拉伸轴的夹角
4 力轴作用在任意方向
二、孪晶(孪生)变形
孪生也是金属塑性变形的一种形式,一般情况下, 金属晶体优先以滑移的方式进行塑性变形,但是当滑 移难以进行时,塑性变形就会以生成孪晶的方式进行, 称为孪生。例如滑移系较少的密排六方晶格金属,当 处于硬取向时,滑移系难以开动,就常以孪生方式进 行变形。滑移系较多的fcc、bcc结构的金属一般不发 生孪生变形,但在极低的温度下变形或是形变速度极 快时,也会以孪生的方式进行塑性变形。 定义:晶体在难以进行滑移时而发生的另一种塑 性变形方式,其特点是变形以晶体整体切变的形式 进行而不是沿滑移系发生相对位移。
第八章塑性加工

第八章塑性加工※8·1 锻造成形8·2 板料冲压成形8·3 挤压、轧制、拉拔成形8·4 特种塑性加工方法8·5 塑性加工零件的结构工艺性8·6 塑性加工技术新进展本章小结塑性加工的基本知识塑性变形的主要形式:滑移、孪晶。
滑移的实质是位错的运动。
金属经过塑性变形后将使其强度、硬度升高,塑性、韧性降低。
即产生形变强化。
此外,还将形成纤维组织。
塑性加工特点:1·塑性加工产品的力学性能好。
2·精密塑性加工的产品可以直接达到使用要求,不须进行机械加工就可以使用。
实现少、无切削加工。
3·塑性加工生产率高,易于实现机械化、自动化。
4·加工面广(几克~几百吨)。
常用的塑性加工方法:锻造、板料冲压、轧制、挤压、拉拔等。
8·1 锻造成形8·1·1 自由锻定义、手工自由锻、机器自由锻设备(锻锤和液压机)1·自由锻工序(基本工序、辅助工序、精整工序)基本工序:镦粗、拔长、弯曲、冲孔、切割、扭转、错移辅助工序:压钳口、压钢锭棱边、切肩各种典型锻件的锻造2·自由锻工艺规程的制订(举例)8·1·2 模锻定义、特点(生产率高、尺寸精度高、加工余量小、节约材料,减少切削、形状比自由锻的复杂、生产批量大但质量不能大)1·锤上模锻2·压力机上模锻8章塑性加工拔长29使坯料横截面减小而长度增加的锻造工序称为拔长。
拔长主要用于轴杆类锻件成形,其作用是改善锻件内部质量。
(1)拔长的种类。
有平砥铁拔长、芯轴拔长、芯轴扩孔等。
8章塑性加工30芯轴拔长8章塑性加工芯轴扩孔型砧拔长圆形断面坯料冲孔采用冲子将坯料冲出透孔或不透孔的锻造工序叫冲孔。
其方法有实心冲子双面冲孔、空心冲子冲孔、垫环冲孔等。
8章塑性加工各种典型锻件的锻造1、圆轴类锻件的自由锻2、盘套类锻件的自由锻3、叉杆类锻件的自由锻4、全纤维锻件的自由锻8章塑性加工典型锻件的自由锻工艺示例43锻件名称工艺类别锻造温度范围设备材料加热火次齿轮坯自由锻1200~800℃65kg空气锤45钢1锻件图坯料图序号工序名称工序简图使用工具操作要点1局部镦粗火钳镦粗漏盘控制镦粗后的高度为45mm序号工序名称工序简图使用工具操作要点2冲孔火钳镦粗漏盘冲子冲孔漏盘(1)注意冲子对中(2)采用双面冲孔3修整外圆火钳冲子边轻打边修整,消除外圆鼓形,并达到φ92±1 mm续表序号工序名称工序简图使用工具操作要点4修整平面火钳镦粗漏盘轻打使锻件厚度达到45±1 mm续表自由锻工艺规程的制订(1)绘制锻件图(敷料或余块、锻件余量、锻件公差)※锻件图上用双点画线画出零件主要轮廓形状,并在锻件尺寸线下面用括号标出零件尺寸。
第8章变形与断裂(2)
铜镍固溶体的力学性能与成分的3关8 系
2. 固溶强化机制 根据溶质原子与位错间的交互作用,曾提出 过几种固溶强化的位错机制 溶质原子与位错的弹性交互作用
(1)点阵畸变 置换型溶质原子因为与溶剂 原子尺寸的差别,引起点阵 畸变,形成内应力场。位错 在内应力场中运动受阻
冷拉钢丝示意图
36
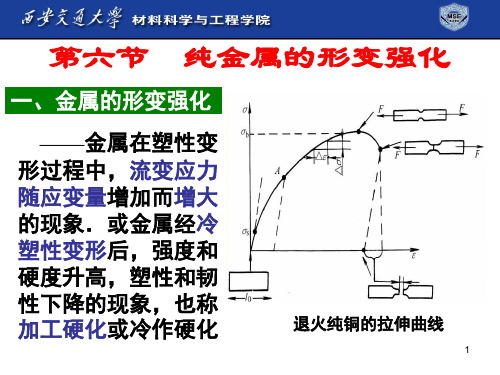
第七节 合金的变形与强化
合金 两种或两种以上金属与金属或金属与非 金属形成的,具有金属特性的 一、单相合金的变形与固溶强化
1. 固溶强化
与纯金属相比,固溶体的强度和硬度升高,塑 性和韧性降低的现象
37
固溶强化对具体合金, 表现规律不一样
对多数合金,溶解度有 限,强化和溶质浓度呈 线性关系
C
扭折与原位错线在同一滑移面上,可随主滑移线一道 运动,几乎不产生阻力,也可因位错线张力而消失3
B D
A 运动方向
bAB
D
bCD
C
bCD
A
割阶
C
B
割阶 与原位错线不在同一滑移面上,也常常不 是易滑移平面。位错会受到阻力
因为此割阶的滑移方向和原位错一致,所以
说明
P339最后一段
带有扭折或割阶的位错,其柏氏矢量与携带它 们的位错相同
扭折可因位错线张力而消失,但割阶不会因此 而消失
扭折可随位错线一道运动,几乎不产生阻力, 割阶与原位错不在同一滑移面上,一般只能通
过攀移随原位错一起运动,即使能随新位错一
起滑移,也增加其滑移阻力
9
10
11
2. 位错反应形成固定位错 两根位错线相遇发生反应后,可能会生成固定位 错—滑移面不是晶体滑移面的位错。固定位错自 身不能滑移运动,还会阻碍其他位错运动.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分切应力
• 对于一根正断面积为A的单 晶体试棒进行拉伸试验, 假定拉力F与滑移面的法线 n的夹角为φ,F和滑移方向 b的夹角为λ,则滑移面的 面积为Q=A/cosφ,
• 作用在滑移面上的正应力 为
• Sn= F/Q =(F×cosφ)/ A
外力在滑移方向的分切应力
2020/3/5
分切应力
2020/3/5
最大分切应力
对于任一给定的φ值,取向因子的最大值出现在 λ=90º- φ时:
cosφcosλ=cosφcos(90º-φ)=(1/2)sin2φ
当φ=45º时(λ也为45º),取向因子有最大值1/2,即最 大分切应力正好落在与外力轴成45º角的晶面以及与外力 轴成45º角的滑移方向上,此时得到最大分切应力
2020/3/5
hcp晶体的可能滑移系
由于hcp金属滑移系数目较少,密排六方金属的塑性通常都不太好
2020/3/5
hcp的滑移面和滑移方向
• 决定hcp滑移面的一个重 要因素c/a>1.633(Cd、 Zn等)底面是滑移面; c/a< 1.633(Ti、Zr、 Be等)除了底面,{1010},{10-11}也是滑移面, 甚至超过底面; c/a≈ 1.633(如Mg)底面为 主要滑移面,也出现 {10-10},{10-11}面滑移
2020/3/5
某些金属的临界分切应力τc
• 值得注意的是面心立方的τc比体心立方的τc低十几倍
晶体结构 FCC
HCP
金属 Ag Al Al Cu Ni
Mg
滑移面 {111} {111} (20℃) {100} (>450℃) {111} {111}
(0001)
滑移方向 <110> <110> <110> <110> <110>
2.塑性变形(结构敏感因素,受外力、温度影 响)。外加应力超过即屈服极限,应力和应变就不 再是线性关系,卸载后留下一定的残余变形或永久 变形,为塑性变形或范性形变 • 3.断裂
2020/3/5
弹性变形特点
• 定义:外力去除以后变形可以消失 • 1.正应力、切应力均可产生弹性变形 • 2.弹性变形具有可逆性 • 3.应力和应变是直线关系,服从虎克定律:在单向
2020/3/5
bcc滑移系
[111]
(1-21) [111]
(1-10)
2020/3/5
[111] (12-3)
bcc的滑移系
滑移方向为<111>,可能出现的滑移面有 {110}、{112}、{123}如果三组滑移面都能启动, 则潜在的滑移系数目为
6 2 12 1 24 1 48(个) {110} {112} {123}
2020/3/5
晶体的性能
• 晶体的弹性变形用弹性模量E和G代表 • 晶体的塑性变形则用单向拉伸时的延伸率δ(断裂前的
最大相对伸长)和断面收缩率ψ(断裂前最大的相对断 面积缩减)来表示 • 晶体的力学性能就是弹性、塑性和强度三方面性能的综 合 • 晶体的弹性和材料的微观组织(结构)关系不大,因而 与材料的成份、热处理的关系不大,属于对结构不敏感 的性能,而晶体的塑性和强度(主要是屈服强度)对微 观组织(结构)十分敏感,属于对结构敏感的性能
2020/3/5
施密德定律
• 通常把给定滑移系上开始产生滑移所需分切应力称为临 界分切应力τc,也就是说晶体开始滑移所需的分切应力 是: τ=σ×μ=τc
• τc就称为临界分切应力,它是个材料常数 上式就称为Schmid(施密德)定律 • 它可以表述为:当作用在滑移面上沿着滑移方向的分切
应力达到临界值τc时晶体便开始滑移
拉伸时,σ=E×ε,在剪切变形时τ=G×γ • 4.变形量很小,塑性变形的1%以下 • 5.不能引起组织转变
2020/3/5
弹性模量
• 工程设计依据-刚度 • 取决于晶体结构和原子间相互作用力
2020/3/5
原子间相互作用力f
• f=A/r2(吸引力) +B/r4(斥力)
• r原子间距离,A、 B常数
2020/3/5
原子间作用力、势能与距离 间关系(AB表示两个原子)
原子间相互作用力f
• 弹性变形外力不足以克服原子间势垒,仅偏离平 衡位置,外力撤销回到平衡位置,宏观上表现为 弹性变形
• 故弹性变形的物理本质就是外力引起原子间距发 生可逆变化,弹性模量反映金属原子间结合力大 小
• 正弹性变形模量E,切弹性模量G,波松比ν(横 向、纵向变形之比,一般金属为0.25-0.35)有 关系: G=E/[2·(1+ν)]
2020/3/5
Schmid实验结果
实验点近似位于双曲线σ×μ=常数上。按照Schmid定律,单晶体没 有确定的屈服极限σs。 晶体开始塑性变形时,τc是一定的,但是拉应力σs并不是一个常数, 它取决于单晶体的位向
2020/3/5
临界分切应力公式
• 对多滑移情况下基本不成立 • 临界分切应力受到成分、温度、表面情况(氧化
<111> <111> <111> <111> <111>
临界分切应力/MN/m2 0.37 0.79
0.98 5.68 0.39-0.50
40.7
1.38
52.4
0.64-0.69
—
12.8
0.64-0.69 27.6 96.5 33.8 41.4 —
fcc滑移系
滑移方向<110>,滑移面一般为{111} 面心立方结构共有四个不同的{111}晶面,每 个滑移面上有三个<110>晶向,因而面心立方晶体 中共有4×3=12个晶体学等价的滑移系统 随着温度的升高等条件的变化,滑移面可能增 加或改变,但滑移方向始终不变,滑移系也因此可 能增多。例如铝在高温下还可能出现{001}[110]滑 移系统
2020/3/5
单晶体的屈服强度与取向因子
单晶体的屈服强度随取向因子而改变 φ=45º时, cosφcosλ=1/2 ,取向因子达到最 大值,产生拉伸变形的屈服应力最小。 φ=90º或0º时, σS =∞, 晶体不能沿该滑移面 产生滑移
• 在拉伸时,可以粗略认为金属单晶体在外力作用下, 滑移系一开动就相当于晶体开始屈服,此时,对应于 临界分切应力的外加应力就相当于屈服强度σS,
(1
)b
b:柏氏矢量 G:切变模量 γ:泊松比 a:滑移面的面间距
2020/3/5
滑移系
• 一个滑移面和此面上的一个滑移方向组成一个滑移系 • 在滑移的情形下,特定的晶面和晶向分别称为滑移面和
滑移方向。一个滑移面和位于这个滑移面上的一个滑移 方向组成一个滑移系统,用{hkl}[uvw]来表示 • 晶体的滑移系统首先取决于晶体结构,但也与温度、合 金元素有关
第八章 塑性变形
• §1 §2 §3 §4 §5 §6
单晶体金属的塑性变形 多晶体的塑性变形 合金的塑性变形 金属塑性变形后的组织与性能 聚合物的变形 陶瓷材料的变形
2020/3/5
金属材料生产基本流程
成分设计 熔炼
2020/3/5
制粉 压型 烧结 后处理铸造 热变形 冷 Nhomakorabea工 热处理
晶体的变形
• 晶体在外力的作用下会发生变形 • 1.弹性变形(结构不敏感因素)
Co {0001}
<11 2 0>
α-Ti (0001),{1010}(20℃) <11 2 0>
α-Ti {1010}(高温)
<11 2 0>
Zr
{101 0}
Fe {110},{112},{123}
Mo {110},{112},{123}
Nb {110}
Ta {110}
W
{110},{112}
<11 2 0>
2020/3/5
滑移系统特点
• 1.明显的晶体学特征 • 密排面上沿着密排方向进行 • 2.滑移面受温度、成分(如合金元素)影响可以
改变,滑移方向不会改变
2020/3/5
常温、常压下各种晶体的滑移系统和临界分切应力
2020/3/5
晶体结构 FCC HCP
BCC
金属 Ag Al Al Cu Ni
Mg
温度对临界分切应力的影响 2020/3/5
临
界
(10-11)
分
切
应
力
(0001)
温度
不同滑移系的临界分切应力 随温度变化的示意图
Schmid定律应用
• 单晶体具有等价的滑移系统时,利用Schmid定 律可以确定在给定方向加载时滑移首先沿哪个和 哪些系统进行,是单滑移、双滑移或多滑移
• 讨论这个问题的最好方法是在学习了晶体X射线 衍射以后利用极射投影图来判断
2020/3/5
§1 单晶体金属的塑性变形
一、由大量位错移动而导致晶体的一部分相对于另 一部分,沿着一定晶面和晶向作相对的移动,即晶 体塑性变形的滑移机制
铝单晶体抛光后拉伸,表面出现的滑移带
2020/3/5
滑移带结构
~20nm
滑 移 带
滑移线
5-50nm
2020/3/5
单晶体金属的滑移
滑移变形是不均匀的,常集中在一部分晶面上,而 处于各滑移带之间的晶体没有产生滑移,滑移带的 发展过程,首先是出现细滑移线,后来才发展成带, 而且,滑移线的数目随应变程度的增大而增多,它 们之间的距离则在缩短
滑移面 {111} {111} (20℃) {100} (>450℃) {111} {111}
(0001)
滑移方向 <110> <110> <110> <110> <110>
<11 2 0>
Mg {1010}(>225℃)
<11 2 0>
Be {0001}
<11 2 0>
Be {1010}