基于LabVIEW的多轴运动控制系统半实物仿真平台设计
基于LabVIEW的多轴运动控制系统的设计与开发

关 键 词 : a V E ; 动 控 制 卡 ; ci X; ci X 自动 化 ; L b IW 运 Ate A te v v 多轴 运 动 中图 分 类 号 : P 7 T 23 文 献标 识 码 : A 文 章 编 号 : 6 1 0 4 2 0 )6 0 5 — 4 1 7 — 2 X(0 8 0 — 0 8 0
第 2 7卷
第 6期
天 滓 工 业 大 学 学 报
J oURNAL ANJ N 0LYTECHNI UNI 0F TI I P C VERS TY I
Vo _ No6 I 27 .
20 0 8年 1 2月
D c mb r 2 0 e e e 0 8
基于 L b I W 的多轴运动控制 系统 的设计 与开发 aVE
(col fnom t na dC mm nct nE g er g Taj o tcncU i ri , in n3 0 6 , hn ) S ho o f ai n o u i i ni e n , in nP l eh i n esy Taj 0 10 C ia I r o ao n i i y v t i
高 瑞 , 长云 , 中伟 苗 王
( 津 工 业 大 学 信 息 与 通 信工 程 学 院 , 津 天 天 306) 0 10
摘
要 : 用“ C 运 动 控 制 卡 ” 采 P+ 的设 计 方案 , 计 开 发 了基 于 Lb IW 的 多轴 运 动 控 制 系统 . 出在 L b I W 中 设 a VE 提 a VE 通过 Ate ci X技 术 开发 系统 控 制 界 面和 控 制 程 序 的 方 法 . 开发 的 系统 不 但 具 有 较 高的 性 能 , v 所 而且 具有 开
基于labview的运动控制系统的软件设计

第一章绪论1.1课题来源以及研究的背景、目的和意义1.1.1课题来源本课题来源于某自动测试系统研究项目中的一部分,研究的硬件平台是一个四轴的运动执行机构,主要工作是设计出上位机软件和运动轨迹规划,要求软件具有易操作性、简单高效性、兼容性,实现运动执行机构的两个动子在X、Y两个方向上的协调运动快速精确的移动到指定的位置,误差范围控制在±3um内。
1.1.2课题研究的背景、目的和意义随着科技的飞速进步和社会的快速发展,于20世纪末,运动控制开始快速发展,并成为了自动化技术的一个关键的分支。
现代文明社会以及和谐社会的标志之一便是生活质量及水平,运动控制技术的发展也同时推动并代表了生活质量及水平。
在现代工业中,运动控制涉及了极其广泛的领域,并迅速地向前推进着,已经涵盖了汽车、纺织机械、冶金机械、家用电器、工业机器人等领域[1]。
虽然运动控制发展的时间并不算悠久,但是运动控制技术的提高也随着制造业对于产品加工的要求的提高在不断地水涨船高。
这也就导致了运动控制技术非常迅速的发展开来,尤其在高科技技术的方面为其提供了极为广阔的发展空间及市场。
现如今,运动控制技术及系统的普及和应用在自我进步的途中,影响了更多的产业,并与微电子技术、传感器技术等技术的发展和科技的进步相辅相成。
与此同时,运动控制在工业化技术中,承担起了重大的任务,因此,对于此技术进行分析,不但能够更深一层次的了解它的理论,还可以更好的在实际生活当中运用。
总而言之,运动控制技术的发展与其相关的技术的发展是共同进退的,其发展空间是巨大的,其将会创造的价值是不可估量的。
运动控制技术正逐渐成为一门具有显著特点,广泛应用于工业、军事及商业等领域,能够产生巨大经济效益的高新技术。
1.2运动控制系统的发展和研究现状人类对运动的控制可以追溯到我国古代用来指示方向的指南针,为中国的马均于公元235年研制的用齿轮传动、能自动指示方向的指南车模型。
指南车作为人类历史上第一架有稳定的机械结构,巧妙地运用了负反馈原理,非常类似于现在的恒值控制系统。
基于LabVIEW与Proteus的测控仿真实验系统设计
基于LabVIEW与Proteus的测控仿真实验系统设计周春明【摘要】A method of design of measurement and control simulation experiment system based on LabVIEW and Proteus was proposed with the remote temperature controlling system as an example. AT89C51 in Proteus was used as the slave computer to achieve the functions of temperature acquisition, A/D conversion and data transmis-sion to the host computer. LabVIEW was employed to construct the master system to achieve the PID control of the received temperature. It transmitted the PID adjustmentdata to SCM in order to adjust its PWM wave’ s duty rati-o. So the working state of“OVEN” could be controlled and the purpose of the remote temperature controlling could be achieved. The master system communicated with the slave computer by a pair of virtual serial ports constructed by Virtual Serial Port Driver 6 . 9 . Simulation results demonstrated the validity of the methods of design of measure-ment and control system. It has a practicability in the field of experiment teaching and project development.%以单片机远程温度控制系统为例,给出了一种基于LabVIEW与Proteus的测控仿真实验系统的设计方法,利用Proteus中的AT89 C51单片机仿真下位机运行,实现温度的采集、 A/D转换器的控制及向上位机传输数据等功能。
基于LabVIEW的自动控制原理虚拟实验系统设计
2.1 基于 LabVIEW 自动控制原理虚拟实验系统 本文设计的基于 LabVIEW 的自动控制原理虚拟实 验系统界面简单,输入参数方便,点击按钮即可操作。自 动控制原理虚拟实验系统设计了课程中常见的 8 个实 验。具体 LabVIEW 虚拟实验系统包括以下子实验。实 验一:一阶系统时域分析;实验二:二阶系统时域分析;实
总 655 期第十期 2018 年 10 月
河南科技 Henan Science and Technology
信息技术
基于 LabVIEW 的自动控制原理虚拟实验系统设计
吕恩胜
(河南应用技术职业学院机电工程学院,河南 郑州 450042)
摘 要:自动控制原理实验是电气、控制和机械专业学生学习自动控制原理课程的一个重要环节。本文设计
收稿日期:2018-09-16 基金项目:2015 年河南省教育技术装备和实践教育研究项目(GZS003);河南省职业教育教学改革研究项目 (ZJB17231)。 作者简介:吕恩胜(1981—),男,硕士,副教授,研究方向:电路理论与应用、通信信号处理。
Copyright©博看网 . All Rights Reserved.
2.2 基于 LabVIEW 二阶系统时域分析实验系统
在“自动控制原理”课程中,输入信号为 R(s) ,输出信
号 C(s) ,典型二阶系统,拉普拉斯逆变换得到时域响应结
本文以“自动控制原理”课程中典型二阶系统的瞬态 响应分析为例,阐述实验平台的设计思想和使用方法。 在控制系统中,机械系统的质量-弹簧-阻尼器,电气系统 的电阻-电感-电容等,控制的类型和元件在物理结构上 千差万别,但在微分方程上都是二阶微分系统,即使是高 阶系统,在一定条件下也可以降阶为二阶系统,足见二阶 系统在控制系统中的重要性。接下来以二阶系统的瞬态 响应分析实验子系统。
基于LabVIEW的数字仿真实验平台的设计

基于LabVIEW的数字仿真实验平台的设计作者:吴正明李君来源:《中国教育技术装备》2009年第02期摘要利用虚拟仪器软件开发平台,在计算机上通过对前面板和后面板的编写来完成实验室及电子课程实验教学中所涉及的数字电路的制作,实现数字电路的逻辑功能的模拟仿真,在实验教学过程中具有实际意义。
关键词虚拟仪器;数字电路;仿真中图分类号:G434 文献标识码:A 文章编号:1671-489X(2009)02-0081-02随着低成本高性能的计算机资源普及运用,数字化仪器平台逐渐取代传统电子仪器已成为一种趋势。
我国理工科学校的教学、科研需要大量的测量分析仪器设备,特别是电子类实验教学,每种仪器都必须配置多套,而且有些仪器设备价格十分昂贵。
因此购置仪器设备的巨大投入经费,一般学校难以承受,造成仪器设备缺乏和过时陈旧等现象,严重影响教学科研效果[1]。
如果把虚拟仪器运用到实验教学和科研中,不但可以节约大量仪器设备的经费投入,而且能够提高实验教学和科研的质量与效率。
1 LabVIEW的编程简介[2-3]在LabVIEW环境下开发的应用程序称之为VI。
VI是LabVIEW的核心,由一个人机交互的界面——前面板(Front Panel)和相当于源代码功能的框图程序——后面板(Diagram)组成。
前面板是程序的界面,在这一界面上有控制量(Controls)和显示量(Indicators)两类对象。
在前面板中,控制量模拟仪器的输入装置并把数据提供给VI的框图程序,例如开关、旋钮;而显示量则是模拟仪器的输出装置并显示由框图程序获得或产生的数据,例如用于显示波形的窗口等。
每一个程序前面板都对应着一段框图程序。
框图程序用LabVIEW图形编程语言编写,可以把它理解成传统程序的源代码。
框图程序由端口、节点、图框和连线构成。
其中端口被用来同程序前面板的控制和显示传递数据,节点被用来实现函数和功能调用,图框被用来实现结构化程序控制命令,而连线代表程序执行过程中的数据流,定义框图内的数据流动方向。
基于LabVIEW的控制原理虚拟实验台开发-----二阶系统

基于LabVIEW的控制原理虚拟实验台开发-----⼆阶系统⼆阶系统时域分析虚拟实验系统⼀、⼆阶系统时域分析原理能⽤⼆阶微分⽅程描述的系统为⼆阶系统。
它在控制⼯程中的应⽤⼗分⼴泛,此外,许多⾼阶系统在⼀定的条件下,常常近似地作为⼆阶系统来研究。
1、数学模型⼆阶系统的运动⽅程⼀般具有以下⼀般形式22()()2()()d c t dc t T T c t r t dt dtζ++=式中,ζ为⼆阶系统阻尼⽐,⽆量纲;T 为⼆阶系统时间常数,单位为秒。
对上式进⾏拉⽒变换的⼆阶系统的传递函数为 22()1()()21C s s R s T s Ts ζΦ==++ 引⼊参数1Tω=,称作⼆阶系统的⽆阻尼⾃然振荡⾓频率,单位为rad/s 。
传递函数变为 222()()()2n n n C s s R s s s ωζωωΦ==++ ⼆阶系统的结构框图如下所⽰2、单位阶跃响应对于单位阶跃输⼊()1()r t t =,1()R s s=,于是 2222221()(2)2n n n n n n s C s s s s s s s ωζωζωωζωω+==-++++212()()n s s s s s ω=-- 求其拉⽒反变换可得到⼆阶系统的单位阶跃响应。
当ζ为不同值时,⼆阶系统的特征根在s 平⾯上的位置不同,所对应的响应就具有不同的形式。
a ζ=0 (零阻尼)222221()()n n n sC s s s s s ωωω==-++ 时域响应为 ()1cos n c t t ω=- (0)t ≥ b ζ>1 (过阻尼)2221()2n n ns C s s s s ζωζωω+=-++ 此时,1,2(n n s ζωωζω=-±=- 可见系统具有两个不相等的负实数极点。
于是,系统单位阶跃响应为12//2121()1/1/1t T t T e e c t T T T T --=++--式中,1T =;2T =c ζ=1(临界阻尼)222211()(2)()n n n n n n C s s s s s s s ωωζωωωω==--++++ 因此, ()1n n tt n c t ete ωωω--=-- (0)t ≥,此时闭环系统的两个极点是1,2n s ω=-。
基于LabVIEW的控制系统仿真(毕业设计论文)

摘要
在控制理论教学和实验中,存在着设备短缺、教学手段单一等问题,采用虚拟控制系统实验方式可有效地解决这些问题。本文对控制系统仿真的意义与研究现状作了介绍,提出并确定了基于LabVIEW的控制系统仿真的实施方案。应用NI公司的LabVIEW 2009、控制设计工具包作为软件开发工具,实现了控制系统的建模、分析与设计这一系列过程的计算机仿真。经过编写程序和发布应用程序,最终开发出了一种交互式实验教学系统。该系统包含信号发生器、典型环节、质点-弹簧-阻尼器系统和一级倒立摆系统四个子模块,用户可进行控制系统建模、性能分析、PID设计、LQR设计等方面的研究。各个子模块运行良好,整个系统具有操作简单、界面友好和实时交互的特点;对于教学和实验的改革和创新具有一定的指导意义。
1.2
随着计算机仿真理论与技术的发展,目前各个科学与工程领域均已开展了仿真技术的研究。系统仿真是通过对系统模型的实验,研究一个存在或设计中的系统。系统仿真技术已经被公认为是一种新的实验手段,在科学与工程领域发挥着越来越重要的作用。
早期的控制系统设计可以由纸笔等工具容易地计算出来。但随着控制理论的迅速发展,只利用纸笔以及计算器等简单的运算工具难以达到预期的效果,加之计算机领域取得了迅速的发展,于是很自然地出现了控制系统的计算机辅助设计方法。控制系统的计算机辅助设计技术的发展目前已达到了相当高的水平,并一直受到控制界的普遍重视。
(2)控制理论中典型实例选择与理论分析
选取控制理论教学和实验中常见的、典型的实例,完成其理论方面的建模、分析、设计。
(3)控制模型相应的仿真VI设计
在(2)的基础上,基于LabVIEW2009平台,使用必要的工具包完成建模、分析、设计的相应的VI设计,完成控制系统仿真的主要程序设计。
通过NI LabVIEW 平台完成控制系统的设计仿真及实现
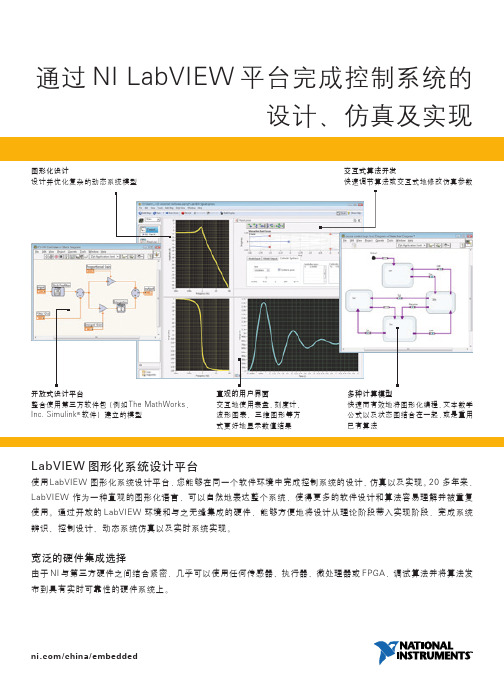
通过NI LabVIEW 平台完成控制系统的设计、仿真及实现LabVIEW 图形化系统设计平台使用LabVIEW 图形化系统设计平台,您能够在同一个软件环境中完成控制系统的设计、仿真以及实现。
20 多年来,LabVIEW 作为一种直观的图形化语言,可以自然地表达整个系统,使得更多的软件设计和算法容易理解并被重复使用。
通过开放的LabVIEW 环境和与之无缝集成的硬件,能够方便地将设计从理论阶段带入实现阶段,完成系统辨识、控制设计、动态系统仿真以及实时系统实现。
宽泛的硬件集成选择由于NI 与第三方硬件之间结合紧密,几乎可以使用任何传感器、执行器、微处理器或FPGA ,调试算法并将算法发布到具有实时可靠性的硬件系统上。
/china/embedded图形化设计设计并优化复杂的动态系统模型交互式算法开发快速调节算法或交互式地修改仿真参数开放式设计平台整合使用第三方软件包(例如The MathWorks ,Inc. Simulink ®软件)建立的模型直观的用户界面交互地使用表盘、刻度计、波形图表、三维图形等方式更好地显示数值结果多种计算模型快速而有效地将图形化编程、文本数学公式以及状态图结合在一起,或是重用已有算法使用LabVIEW设计控制系统LabVIEW提供了一套完整的简化控制设计的工具。
LabVIEW作为一个完整的编程环境,能够提供与传统编程语言相同的灵活性;同时,其图形化特性能够提高进行自定义算法开发、分析以及可视化的效率。
系统辨识——根据用NI硬件测量到的实际系统的激励和响应,推导数学模型。
控制设计与仿真——设计控制器及动态系统参数,仿真验证控制器性能,无需重新编译直接将代码发布到实时系统硬件上。
高级控制算法——现成可用的高级控制算法,例如自适应PID以及模型预测控制(MPC)等,或是通过一个简单的软件模块自定义控制算法。
使用NI硬件对控制系统进行原型验证以及发布无论是快速原型开发、硬件在环测试或是控制系统的最终实现,都可以利用NI的硬件平台完成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于LabVIEW的多轴运动控制系统半实物仿真平台设计
基于LabVIEW的多轴运动控制系统半实物仿真平台设计
摘要:随着工业自动化的不断发展,多轴运动控制系统在工业生产中的应用日益广泛。
为了提高系统的性能并减少实际试验中的风险与成本,本文设计了基于LabVIEW的多轴运动控制系统半实物仿真平台。
该平台通过软件仿真实现多轴运动控制的动态展示,使用户能够更直观地了解系统的工作原理以及调试参数。
本文首先介绍了多轴运动控制系统的基本原理和结构,然后详细阐述了平台的设计思路和实现过程,并通过实例验证了平台的可行性和有效性。
最后,对平台的不足之处进行了总结,并对未来的工作进行了展望。
关键词:多轴运动控制系统;半实物仿真平台;LabVIEW;动态展示;仿真实例
1.引言
多轴运动控制系统是一种广泛应用于机械加工、自动化生产等领域的高精度控制系统。
它通过控制驱动器和伺服电机来实现工作物体在多个轴向上的运动控制,可以实现较高的定位精度和运动速度,并且具有反馈控制的能力。
然而,为了确保系统的安全性和可靠性,在实际开发和试验中需要耗费大量的时间和资源。
因此,设计一种能够在实际试验之前对系统进行全面验证和调试的仿真平台具有重要的意义。
2.多轴运动控制系统的基本原理和结构
多轴运动控制系统由伺服电机、传感器、运动控制器以及上位机等组成。
其中,伺服电机通过驱动器转换电能为机械能,可以控制物体的位置和速度。
传感器用于实时反馈物体的状态信息,如位置、速度和加速度等。
运动控制器是系统的核心部
件,负责接收传感器的反馈信号,并通过控制算法生成合适的输出信号控制伺服电机。
上位机是用户与系统交互的界面,通过上位机可以输入运动参数和控制指令,实现运动轨迹的规划和控制。
3.基于LabVIEW的多轴运动控制系统半实物仿真平台设计
为了满足对多轴运动控制系统进行全面仿真和调试的需求,本文设计了一种基于LabVIEW的半实物仿真平台。
该平台实现了具有动态展示功能的多轴运动控制系统的仿真,使用户能够更加直观地了解系统的工作原理和调试参数。
该仿真平台由上位机界面和运动控制模块两个部分组成。
上位机界面通过LabVIEW开发,可以实现用户与系统的交互。
用户可以通过上位机界面输入运动参数和控制指令,系统则根据用户输入的参数和指令生成对应的控制信号,通过仿真模块进行动态展示。
运动控制模块是平台的核心部件,通过开发LabVIEW程序实现对多轴运动控制系统的仿真。
该模块首先利用传感器模型生成相应的传感器反馈信号,并将其输入到运动控制器。
运动控制器根据输入信号进行运动参数的计算和控制算法的执行,最终生成对伺服电机的控制信号。
同时,仿真模块根据仿真算法实现了物体的动态展示,用户可以通过上位机界面实时观察物体的运动轨迹和参数变化。
4.仿真实例验证
为了验证仿真平台的可行性和有效性,本文选择了一个典型的多轴运动控制系统进行仿真实验。
在实验中,用户通过上位机界面输入了运动轨迹和控制参数,系统根据用户输入的参数和指令进行仿真,并通过物体的动态展示实时展示物体的运动状态。
实验结果表明,仿真平台能够准确地模拟多轴运动控
制系统的运动过程,并能够直观地反映系统的工作状态。
5.总结与展望
本文设计了一种基于LabVIEW的多轴运动控制系统半实物仿真平台,通过软件仿真实现对多轴运动控制系统的动态展示。
实例验证结果表明,该仿真平台具有较高的可行性和有效性,能够大大简化多轴运动控制系统的调试和验证过程。
然而,该平台仍然存在一定的不足之处,如对实际环境的模拟程度较低、系统的可扩展性有限等。
因此,未来的工作可以从这些方面进行改进,以提高仿真平台的实用性和适用性,为多轴运动控制系统的研究和应用提供更好的支持
综上所述,本文设计的基于LabVIEW的多轴运动控制系统半实物仿真平台在验证了其可行性和有效性方面取得了良好的结果。
通过仿真实验,该平台能够准确模拟多轴运动控制系统的运动过程,并直观展示系统的工作状态。
然而,在实践中还存在一些问题,如对实际环境的模拟程度较低和系统的可扩展性有限等。
未来的改进可以集中在这些方面,以提高仿真平台的实用性和适用性,为多轴运动控制系统的研究和应用提供更好的支持。