连杆机构大作业题目.
机械原理大作业1连杆机构27题

机械原理大作业1连杆机构27题大作业1 连杆机构运动分析1、运动分析题目如图所示机构,已知机构各构件的尺寸为280mm AB =,350mm BC =,320mm CD =,160mm AD =,175mm BE = 220mm EF =,25mm G x =,80mm G y =,构件1的角速度为110rad/s ω=,试求构件2上点F 的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。
2、建立坐标系建立以点A 为原点的固定平面直角坐标系图13、对机构进行结构分析该机构由I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组RPR(滑块4及杆5)组成。
I级杆组RR,如图2所示;II级杆组RRR,如图3所示;II级杆组RPR,如图4所示。
图2图 3图 44、各基本杆组运动分析的数学模型(1)同一构件上点的运动分析:图 5如图5所示的构件AB,,已知杆AB 的角速度=10/rad s ,AB 杆长i l =280mm,可求得B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。
=cos =280cos B i x l ??; =sin =280sin B i y l ??;==-sin =-BxB i B dx v l y dt ω?ω; ==cos =;B yB i B dyv l x dt ω?ω222B 2==-cos =-BxB i d x a l x dt ω?ω;2222==-sin =-ByB i B d y a l y dtω?ω。
(2)RRRII 级杆组的运动分析:图 6如图6所示是由三个回转副和两个构件组成的II 级组。
已知两杆的杆长2l 、3l 和两个外运动副B 、D 的位置(B x 、B y 、D x 、D y )、速度(xB yB xD yD v v v v 、、、)和加速度(xB yB xD yD a a a a 、、、)。
曲柄连杆机构试题含答案
曲柄连杆机构--试题及答案一.判断题(30)1.四缸四冲程发动机的做功顺序一般为1342;六缸四冲程发动机的做功顺序一般为153624,做功间隔角为120度。
(√ )2.气环的主要作用是密封、导热和刮油、布油作用。
(×)3.曲柄连杆机构的主要由三部分组成:机体组、活塞连杆组和曲轴飞轮组。
(√ )4.发动机活塞往复运动是匀速运动。
(× )5.安装气缸垫时,印有批次号的一面应朝下。
(× )6.安装气缸盖螺栓时,可以随意顺序进行安装固定。
(× )7.油底壳底部装有磁性放油螺栓可吸附机油中铁屑,减少发动机磨损。
(√ )8.卡罗拉发动机的油底壳是通过垫圈进行密封的。
(× )9.拆卸油底壳固定螺栓时,应按照从外到内对角线的形式拆卸。
(√ )10.飞轮是一个转动惯量很大的圆盘,外缘上压有一个齿圈,与起动机的驱动齿轮啮合,供起动发动机时使用。
(√ )11.活塞环密封时由于环的背压力远大于环的弹力,因此只要背压力足够大,就能保证环面与气缸壁面间的密封。
(× )12.如果曲轴的主轴颈数等于气缸数+1,则该曲轴为全支承曲轴,它的长度相对非全支承曲轴而言要短。
(× )13.锥面环在气缸内向下滑动时刮油,向上滑动时由于斜面的油楔作用,环可在油膜上浮起,减少磨损,因此经常用作第一道环。
(× )14.对于四冲程发动机,无论其是几缸,其作功间隔均为180°曲轴转角。
(× )15.飞轮上通常刻有第一缸发火正时记号,以便校准发火时间。
(√ )16.活塞各个断面的热膨胀量是上小下大。
(× )17.多缸发动机的曲轴均采用全支承。
(× )18.为了充分发挥飞轮的作用,应尽可能使飞轮的质量均布在整个飞轮上。
(× )19.活塞环在自然状态下是一个封闭的圆环形。
(× )20.四冲程八缸发动机由于有八个缸,因此它的曲轴就有8个曲拐。
平面连杆机构习题及答案
平面连杆机构一、填空:1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。
2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。
3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。
4.铰链四杆机构有曲柄的条件〔1〕连架杆和机架中必有一杆是最短杆;〔2〕最短杆与最长杆长度之和小于或等于其它两杆长度之和。
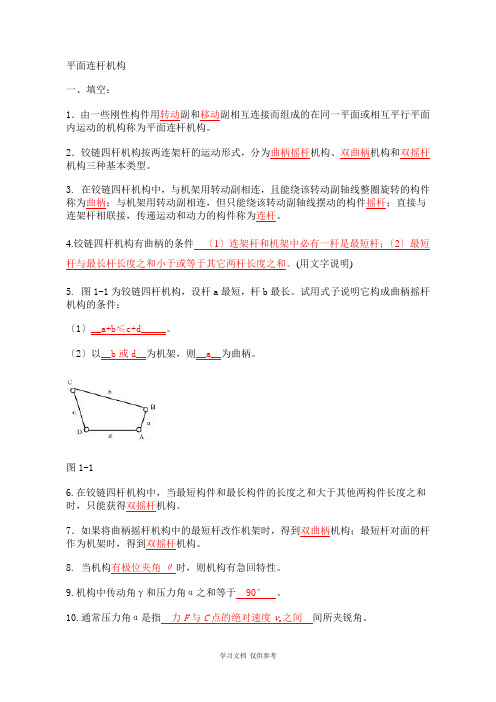
(用文字说明)5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。
试用式子说明它构成曲柄摇杆机构的条件:〔1〕__a+b≤c+d_____。
〔2〕以__b或d__为机架,则__a__为曲柄。
图1-16.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。
7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。
8. 当机构有极位夹角θ时,则机构有急回特性。
9.机构中传动角γ和压力角α之和等于90°。
10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。
二、选择题:1.在曲柄摇杆机构中,只有当为主动件时,才会出现“死点”位置。
D.曲柄2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构。
C. 有时有曲柄,有时没曲柄D. 以上答案均不对3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。
A. K<1B. K=1C. K>1D. K=04.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。
A.θ<0B.θ=0C. θ≦0D. θ﹥05.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是C.不确定的。
C.不确定的D. 以上答案均不对6.曲柄滑决机构是由 A. 曲柄摇杆机构演化而来的。
机械原理大作业(一)--连杆(34题)
机械原理大作业(一)作业名称:连杆机构运动分析设计题目:(34)题院系:船舶学院班级: 1213101设计者:学号:哈尔滨工业大学机械设计一、运动分析题目如图所示机构,已知机构各构件的尺寸为BF=200mm,EF=1.25BF,DE=1.13BF,EH=0.85BF,HF=0.65BF,CH=0.81BF,GC=1.56BF,BD=0.58BF,BG=1.85BF,GD=1.6BF,构件1的角速度为W1=10rad/s,试求构件2上点H的轨迹及构件5的角位移,角速度,角加速度,并对计算结果进行分析。
机构结构分析:二、机构的结构分析及基本杆组划分机构各构件都在同一平面内运动,活动构件数n=5,=7,=0则机构的自由度为:F=3×n-2×-1×=3×5-2×7-0=12.基本杆组划分(1)去除虚约束和局部自由度本机构中无虚约束或局部自由度。
(2)拆杆组。
从远离原动件(即杆1)进行拆分,就可以得到由杆4,5 组成的RRRⅡ级杆组GCH,2,3 组成的RRRⅡ级杆组EDF,最后剩下Ⅰ级机构杆1。
(3)确定机构的级别 由(2)知,机构为Ⅱ级机构三、各基本杆组的运动分析数学模型1)Ⅰ级杆组BF (原动件)在Ⅰ级杆组BF 中,即已知构件上B 点的运动参数,求同一构件上F 点(回转副)的运动参数。
调用Ⅰ级机构子程序即可求解 ①位置分析 由图可得F 点的矢量方程F B BF r r l =+x,y 轴上的投影坐标方程为cos sin F B BF BF F B BF BF x x l y y l ϕϕ=+⋅⎫⎬=+⋅⎭(1)②速度和加速度分析 将式(1)对时间t 求导即可得出速度方程:cos sin BF BF BF BF FF B BF FF B BF dx x x l dtdy y x l dt ϕϕϕϕ⋅⋅⋅⋅⋅⋅⎫⎪==-⎪⎬⎪==+⎪⎭ (2)2222cos sin sin cos BF BF BF BF BF BF BF FF B BF BF BF F F B BFBF d x x x l l dtd y y y l l dt ϕϕϕϕϕϕϕϕ⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⎫⎪==--⎪⎬⎪==--⎪⎭(3)其中因为设B 为原点:B x =0;B y =0 ;B x ⋅=0 ;B y ⋅=0 ;B x ⋅⋅=0 ;B y ⋅⋅=0由上(1)(2)(3)方程可求出F 点的位移,速度,加速度2)RRR Ⅱ级杆组DEF 分析,求出F 点的角位移,角速度,角加速度上面1)中已求得F 点的位移,速度,加速度。
.6-1-1.平面连杆机构-习题+答案很全很好哦

.6-1-1.平面连杆机构-习题+答案很全很好哦第一篇:.6-1-1.平面连杆机构-习题+答案很全很好哦平面连杆机构—周练一、判断题(每空3分,共计60分)1.平面连杆机构的基本形式,是铰链四杆机构。
()2.平面四杆机构都有曲柄。
()3.曲柄和连杆都是连架杆。
()4.在平面连杆机构中,只要以最短杆作固定机架,就能得到双曲柄机构。
()5.铰链四杆机构的曲柄存在条件是:连架杆或机架中必有一个是最短杆;量短杆与最长杆的长度之和小于或等于其余两杆的长度之和。
()6.利用选择不同构件作固定机架的方法,可以把曲柄摇杆机构改变成双摇杆机构。
()7.压力角就是主动件所受驱动力的方向线与该点速度的方向线之间的夹角。
()8.压力角越大,则机构传力性能越差。
()9.当机构的极位夹角θ=0时,机构无急回特性。
()10.在有曲柄的平面连杆机构中,曲柄的极位夹角θ,可以等于0,也可以大于0。
()11.机构是否存在死点位置与机构取那个构件为原动件无关。
()12.曲柄的极位夹角θ越大,机构的急回特性系数K也越大,机构的急回特性也越显著。
(A)13.曲柄滑块机构,滑块在作往复运动时,不会出现急回运动。
()14.对于曲柄摇杆机构,当取摇杆为主动件时,机构有死点位置。
()15.机构的极位夹角是衡量机构急回特性的重要指标。
极位夹角越大,则机构的急回特性越明显。
()16.在曲柄摇杆机构中,曲柄和连杆共线,就是“死点”位置。
()0017.在曲柄和连杆同时存在的平面连杆机构中,只要曲柄和连杆共线,这个位置就是曲柄的“死点”位置。
()18.“死点”位置在传动机构和锁紧机构中所起的作用相同,但带给机构的后果是不同的。
()19.传动机构出现“死点”位置和急回运动,对机构的工作都是不利的。
()20.铰链四杆机构由于积累误差较大,所以不能得到精确的预定规律。
()二、选择题(每空3分,共计51分)1.铰链四杆机构中,作整周回转运动的杆件是()A、摇杆B、曲柄C、连杆2.铰链四杆机构中的运动副属于()A、高副B、低副C、螺旋副3.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,最短杆为机架,这个机构叫做()A、曲柄摇杆机构 B、双曲柄机构` C、双摇杆机构4.平面四杆机构中,如果最短杆与最长杆的长度之和大于其余两杆的长度之和,最短杆为机架,这个机构叫做()A、曲柄摇杆机构B、双曲柄机构` C、双摇杆机构5.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其他两杆的长度之和,最短杆是连架杆,这个机构叫做()A、曲柄摇杆机构 B、双曲柄机构` C、双摇杆机构6.平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆长度之和,最短杆是连杆,这个机构叫做()A、曲柄摇杆机构 B、双曲柄机构` C、双摇杆机构7.能把转动运动转变成往复摆动运动的机构是()A、曲柄摇杆机构B、双曲柄机构`C、双摇杆机构D、曲柄滑块机构8.能把转动运动转换成往复直线运动,也可以把往复直线运动转换成转动运动的机构是()A、曲柄摇杆机构B、双曲柄机构C、双摇杆机构D、曲柄滑块机构9.能把等速转动运动转变成旋转方向相同的变速转动运动的机构是()A、曲柄摇杆机构B、不等长双曲柄机构`C、双摇杆机构D、曲柄滑块机构 10.曲柚摇杆机构的传动角是()a.连杆与从动摇杆之间所夹的余角; B、连杆与从动摇杆之间所夹的锐角; C、机构极位夹角的余角。
连杆机构大作业题目

大作业(一)平面连杆机构的运动分析(题号:4-B)班级:机制096学号:***********名:***同组其他人员:________________________完成日期:________________________平面连杆机构的运动分析题目试用计算机完成下列平面连杆机构的运动分析。
1.图a 所示的为一平面六杆机构。
假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及E 点的位移、速度和加速度的变化情况。
a )表1 平面六杆机构的尺寸参数(单位:mm )mm l 0.652=',mm x G 5.153=,mm y G 7.41=二、平面连杆机构的运动分析方程 1)位置分析 建立封闭矢量多边形 l 1+l 2=l 4+l 3;l 1+l 2 +l2’=AG +l 5 +l 6; (式1)将机构的封闭矢量方程式(1)写成在两坐标上的投影式,并改写成方程左边仅含未知量项的形式,即得(式2)由于牛顿迭代法不便于限制l5,l6的位置。
故在计算式采用复数矢量法直接求的。
求,;(1)(2)消去θ2得经整理后并可简化为式中:解之可得实际运动中0<θ3<180,故‘ +-’适当选择;求θ5,θ6 :先有则2)角速度分析E点速度;3)角加速度分析;E点加速度采用高斯消去法求角速度,角加速度;三、程序流程图源程序;#include<stdio.h>#include<stdlib.h>#include<math.h>#define PI 3.1415926#define N 4void Solutionangle(double [18],double ); /*矢量法求角位移*/ void Solutionspeed(double [N][N],double [N],double [18],double ); /*角速度求解*/void Solutionacceleration(double [N][N],double [N][N],double [N],double [18]);/*角加速度求解*/void GaussianE(double [N][N],double [N],double [N]);/*高斯消去*/void FoundmatrixA(double [18],double [N][N]); //创建系数矩阵Avoid FoundmatrixB(double [18],double ,double [N]);//创建系数矩阵Bvoid FoundmatrixDA(double [18],double [N][N]);//创建矩阵DAvoid FoundmatrixDB(double [18],double ,double [N]);//创建矩阵DB//定义全局变量double l1=26.5,l2=105.6,l3=67.5,l4=99.4,l5=37.4,l6=28.0;double l2g=65.0,xg=153.5,yg=41.7,inang=60*PI/180,as1=1.0;//主函数void main(){int i,j;FILE *fp;double shuju[36][18];double psvalue[18],a[N][N],da[N][N],b[N],db[N],ang1;//建立文件,并制表头if((fp=fopen("filel","w"))==NULL){printf("Cann't open this file.\n");exit(0);}fprintf(fp,"\n The Kinematic Parameters of Point 5\n");fprintf(fp," ang2 ang3 ang5 ang6");fprintf(fp," as2 as3 as5 as6");fprintf(fp," aas2 aas3 aas5 aas6");fprintf(fp," xe ye vex vey aex aey\n");//计算数据并写入文件for(i=0;i<36;i++){ang1=i*PI/18;Solutionangle(psvalue,ang1);FoundmatrixB(psvalue,ang1,b);FoundmatrixA(psvalue,a);Solutionspeed(a,b,psvalue,ang1);FoundmatrixDA(psvalue,da);FoundmatrixDB(psvalue,ang1,db);Solutionacceleration(a,da,db,psvalue);for(j=0;j<4;j++){shuju[i][j]=psvalue[j]*180/PI;}for(j=4;j<18;j++){shuju[i][j]=psvalue[j];}fprintf(fp,"\n");for(j=0;j<18;j++)fprintf(fp,"%12.3f",shuju[i][j]);}fclose(fp);//输出数据for(i=0;i<36;i++){ang1=i*PI/18;printf("\n输出ang1=%d时的求解\n",i*10);printf("angle angspeed angacceleration :\n");for(j=0;j<4;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=4;j<8;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=8;j<12;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=12;j<18;j++)printf("%lf\t",shuju[i][j]);printf("\n");}}/*矢量法求角位移*/void Solutionangle(double value[18],double ang1){double xe,ye,A,B,C,phi,alpha,csn,ang5g,d2,d,ang2,ang3,ang5,ang6;A=2*l1*l3*sin(ang1);B=2*l3*(l1*cos(ang1)-l4);C=l2*l2-l1*l1-l3*l3-l4*l4+2*l1*l4*cos(ang1);ang3=2*atan((A+sqrt(A*A+B*B-C*C))/(B-C));if(ang3<0)//限定ang3大小{ang3=2*atan((A-sqrt(A*A+B*B-C*C))/(B-C));}ang2=asin((l3*sin(ang3)-l1*sin(ang1))/l2);xe=l4+l3*cos(ang3)+l2g*cos(ang2-inang);ye=l3*sin(ang3)+l2g*sin(ang2-inang);phi=atan2((yg-ye),(xg-xe));d2=(yg-ye)*(yg-ye)+(xg-xe)*(xg-xe);d=sqrt(d2);csn=(l5*l5+d2-l6*l6)/(2.0*l5*d);alpha=atan2(sqrt(1.0-csn*csn),csn);ang5g=phi-alpha;ang5=ang5g-PI;ang6=atan2(ye+l5*sin(ang5g)-yg,xe+l5*cos(ang5g)-xg);value[0]=ang2;value[1]=ang3;value[2]=ang5;value[3]=ang6;value[12]=xe;value[13]=ye;//限定角度大小for(int i=0;i<4;i++){while(value[i]>2*PI)value[i]-=2*PI;while(value[i]<0)value[i]+=2*PI;}}/*角速度求解*/void Solutionspeed(double a2[N][N],double b2[N],double value[18],double ang1){double ang2,ang3;ang2=value[0];ang3=value[1];double p2[N];GaussianE(a2,b2,p2);value[4]=p2[0];value[5]=p2[1];value[6]=p2[2];value[7]=p2[3];value[14]=-l3*value[5]*sin(ang3)-l2g*value[4]*sin(ang2-inang);value[15]=l3*value[5]*cos(ang3)+l2g*value[4]*cos(ang2-inang);}/*角加速度求解*/void Solutionacceleration(double a3[N][N],double da3[N][N],doubledb3[N],double value[18]){int i,j;double ang2,ang3;ang2=value[0];ang3=value[1];double bk[N]={0};double p3[N];for(i=0;i<N;i++){for(j=0;j<N;j++){bk[i]+=-da3[i][j]*value[4+j];}bk[i]+=db3[i]*as1;}GaussianE(a3,bk,p3);value[8]=p3[0];value[9]=p3[1];value[10]=p3[2];value[11]=p3[3];value[16]=-l3*value[9]*sin(ang3)-l3*value[5]*value[5]*cos(ang3)-l2g* value[8]*sin(ang2-inang)-l2g*value[4]*value[4]*cos(ang2-inang);value[17]=l3*value[9]*cos(ang3)-l3*value[5]*value[5]*sin(ang3)+l2g* value[8]*cos(ang2-inang)-l2g*value[4]*value[4]*sin(ang2-inang);}/*高斯消去法解矩阵方程*/void GaussianE(double a4[N][N],double b4[N],double p4[N]){int i,j,k;double a4g[N][N],b4g[N],t;for(i=0;i<N;i++)for(j=0;j<N;j++)a4g[i][j]=a4[i][j];for(i=0;i<N;i++)b4g[i]=b4[i];//施主对角线上的值竟可能大if(a4g[0][0]<a4g[1][0] && a4g[0][1]>a4g[1][1]){for(j=0;j<N;j++){t=a4g[0][j];a4g[0][j]=a4g[1][j];a4g[1][j]=t;}t=b4g[0];b4g[0]=b4g[1];b4g[1]=t;}if(a4g[2][2]<a4g[3][2] && a4g[2][3]>a4g[3][3]){for(j=0;j<N;j++){t=a4g[2][j];a4g[2][j]=a4g[3][j];a4g[3][j]=t;}t=b4g[2];b4g[2]=b4g[1];b4g[3]=t;}//初等行变换for(j=0;j<N;j++)for(i=0;i<N;i++){if(i!=j){for(k=0;k<N;k++)if(k!=j){a4g[i][k]-=a4g[i][j]/a4g[j][j]*a4g[j][k];}b4g[i]-=b4g[j]*a4g[i][j]/a4g[j][j];a4g[i][j]=0;}}for(i=0;i<N;i++)b4g[i]/=a4g[i][i];p4[0]=b4g[0];p4[1]=b4g[1];p4[2]=b4g[2];p4[3]=b4g[3];}//创建系数矩阵Avoid FoundmatrixA(double value5[18],double a5[N][N]){double ang2,ang3,ang5,ang6;ang2=value5[0];ang3=value5[1];ang5=value5[2];ang6=value5[3];a5[0][0]=-l2*sin(ang2);a5[0][1]=l3*sin(ang3);a5[1][0]=l2*cos(ang2);a5[1][1]=-l3*cos(ang3);a5[2][0]=-l2*sin(ang2)-l2g*sin(ang2-inang);a5[2][2]=l5*sin(ang5);a5[2][3]=l6*sin(ang6);a5[3][0]=l2*cos(ang2)+l2g*cos(ang2-inang);a5[3][2]=-l5*cos(ang5);a5[3][3]=-l6*cos(ang6);a5[0][2]=a5[0][3]=a5[1][2]=a5[1][3]=a5[2][1]=a5[3][1]=0;}//创建系数矩阵Bvoid FoundmatrixB(double value6[18],double ang1,double b6[N]){b6[0]=b6[2]=l1*sin(ang1)*as1;b6[1]=b6[3]=-l1*cos(ang1)*as1;}//创建矩阵DAvoid FoundmatrixDA(double value7[18],double da7[N][N]){double ang2,ang3,ang5,ang6,as2,as3,as5,as6;ang2=value7[0];ang3=value7[1];ang5=value7[2];ang6=value7[3];as2=value7[4];as3=value7[5];as5=value7[6];as6=value7[7];da7[0][0]=-l2*as2*cos(ang2);da7[0][1]=l3*as3*cos(ang3);da7[1][0]=-l2*as2*sin(ang2);da7[1][1]=l3*as3*sin(ang3);da7[2][0]=as2*(-l2*cos(ang2)-l2g*cos(ang2-inang));da7[2][2]=as5*l5*cos(ang5);da7[2][3]=as6*l6*cos(ang6);da7[3][0]=as2*(-l2*sin(ang2)-l2g*sin(ang2-inang));da7[3][2]=as5*l5*sin(ang5);da7[3][3]=as6*l6*sin(ang6);da7[0][2]=da7[0][3]=da7[1][2]=da7[1][3]=da7[2][1]=da7[3][1]=0; }//创建矩阵DBvoid FoundmatrixDB(double value8[18],double ang1,double db8[N]){db8[0]=db8[2]=l1*as1*cos(ang1);db8[1]=db8[3]=l1*as1*sin(ang1);}得出数据;jiao ang2 ang3 ang5 ang6 as2 as3 as5 as6 aas2 aas3 aas5 aas6 vex vey0 39.329 82.523 325.598 123.267 -0.364 -0.364 -2.106 -2.584 0.065 0.605 4.42 4.582 15.987 -25.3 -48.191 3.45810 35.791 79.453 308.065 101.37 -0.34 -0.247 -3.233 -3.736 0.192 0.71 -1.774 -6.069 7.346 -23.234 -49.638 19.20220 32.581 77.609 295.879 86.4 -0.3 -0.121 -2.877 -3.429 0.266 0.725 0.725 -3.084 -0.997 -19.033 -45.237 27.60230 29.828 77.021 286.688 76.547 -0.25 0.002 -2.704 -3.254 0.291 0.669 2.1 -1.259 -8.281 -14.038 -37.988 28.54640 27.579 77.594 278.84 70.118 -0.2 0.11 -2.713 -3.267 0.283 0.572 3.101 0.033 -14.228 -9.365 -30.199 24.40150 25.822 79.164 271.136 65.475 -0.152 0.2 -2.898 -3.514 0.258 0.462 4.358 1.42 -18.855 -5.654 -22.943 17.94460 24.514 81.54 262.355 60.628 -0.11 0.272 -3.264 -4.045 0.23 0.356 6.796 3.96 -22.282 -3.115 -16.445 11.22570 23.609 84.538 250.648 52.508 -0.072 0.325 -3.717 -4.794 0.203 0.26 12.436 10.302 -24.633 -1.682 -10.596 5.41180 23.059 87.993 233.633 36.895 -0.039 0.363 -3.706 -5.092 0.182 0.177 21.373 22.181 -26.009 -1.142 -5.241 1.02890 22.827 91.758 212.277 13.352 -0.008 0.388 -2.652 -4.097 0.166 0.105 19.269 23.261 -26.486 -1.23 -0.291 -1.772100 22.886 95.709 192.907 348.876 0.02 0.401 -1.39 -2.688 0.155 0.043 8.187 11.83 -26.134 -1.671 4.258 -3.03110 23.215 99.735 179.35 328.766 0.046 0.403 -0.633 -1.742 0.148 -0.013 2.177 4.612 -25.026 -2.207 8.349 -2.894120 23.803 103.74 171.086 313.49 0.071 0.396 -0.618 -1.321 0.144 -0.063 2.053 2.131 -23.252 -2.612 11.883 -1.569130 24.641 107.636 166.438 301.951 0.096 0.381 -0.335 -1.004 0.141 -0.108 1.238 1.535 -20.917 -2.7 14.749 0.688140 25.726 111.343 163.988 293.121 0.121 0.359 -0.172 -0.774 0.139 -0.149 0.668 1.136 -18.148 -2.335 16.845 3.578150 27.053 114.792 162.729 286.295 0.145 0.33 -0.092 -0.599 0.136 -0.185 0.272 0.88 -15.086 -1.434 18.104 6.765160 28.619 117.918 161.961 281.015 0.168 0.295 -0.07 -0.462 0.131 -0.216 -0.009 0.705 -11.878 0.023 18.515 9.895170 30.413 120.667 161.189 276.972 0.19 0.255 -0.09 -0.351 0.122 -0.242 -0.208 0.567 -8.668 1.997 18.144 12.626180 32.419 122.995 160.062 273.919 0.21 0.21 -0.139 -0.263 0.108 -0.262 -0.345 0.436 -5.582 4.39 17.137 14.66190 34.613 124.867 158.341 271.626 0.228 0.164 -0.208 -0.199 0.088 -0.276 -0.432 0.296 -2.711 7.061 15.715 15.783200 36.96 126.259 155.87 269.847 0.241 0.115 -0.288 -0.161 0.063 -0.285 -0.481 0.141 -0.105 9.839 14.15 15.88210 39.415 127.153 152.563 268.314 0.249 0.064 -0.374 -0.15 0.031 -0.291 -0.503 -0.021 2.237 12.543 12.732 14.933220 41.924 127.541 148.38 266.744 0.251 0.013 -0.462 -0.168 -0.006 -0.294 -0.506 -0.18 4.364 14.994 11.731 12.997230 44.421 127.416 143.317 264.862 0.247 -0.038 -0.55 -0.212 -0.049 -0.298 -0.496 -0.319 6.369 17.027 11.37 10.16240 46.833 126.77 137.39 262.43 0.234 -0.091 -0.635 -0.277 -0.096 -0.303 -0.474 -0.417 8.379 18.493 11.797 6.506250 49.076 125.596 130.639 259.278 0.213 -0.144 -0.715 -0.354 -0.149 -0.309 -0.441 -0.456 10.536 19.253 13.061 2.079260 51.059 123.882 123.118 255.341 0.182 -0.199 -0.788 -0.432 -0.206 -0.318 -0.403 -0.428 12.982 19.173 15.078 -3.129270 52.683 121.614 114.892 250.666 0.141 -0.255 -0.856 -0.5 -0.266-0.326 -0.376 -0.342 15.828 18.113 17.578 -9.172280 53.843 118.776 106.005 245.397 0.089 -0.313 -0.922 -0.55 -0.328 -0.332 -0.383 -0.237 19.116 15.92 20.031 -16.099290 54.431 115.361 96.438 239.706 0.027 -0.37 -0.994 -0.586 -0.386 -0.329 -0.46 -0.188 22.767 12.446 21.555 -23.818300 54.348 111.373 86.051 233.663 -0.045 -0.426 -1.089 -0.626 -0.433 -0.307 -0.658 -0.316 26.513 7.586 20.875 -31.863310 53.512 106.854 74.482 227.008 -0.123 -0.476 -1.237 -0.72 -0.457 -0.253 -1.097 -0.862 29.836 1.371 16.468 -15.719320 51.885 101.9 60.917 218.711 -0.202 -0.512 -1.505 -0.983 -0.442 -0.153 -2.11 -2.388 31.97 -5.876 7.096 -15.719330 49.493 96.686 43.514 205.974 -0.274 -0.526 -2.034 -1.659 -0.376 0.002 -4.052 -5.6 32.023 -13.395 -7.196 -15.719340 46.454 91.482 19.363 183.783 -0.33 -0.509 -2.78 -2.796 -0.255 0.204 -3.32 -5.95 29.302 -19.97 -24.083 -15.719350 42.975 86.637 350.437 152.646 -0.361 -0.454 -2.818 -3.205 -0.096 0.422 2.827 1.495 -15.719 -15.719 -15.719 -15.719。
汽车曲柄连杆机构试题
汽车曲柄连杆机构试题一.填空题1.曲柄连杆机构由————、————和————等三部分组成。
2.发动机各个部分机构和系统的装配基体是————。
3.活塞连杆组由`————、————、————和————等组成。
4.活塞包括————和————两种。
5.在安装气环时,各个气环的切口应该————。
6.油环分为————和组油环两种,组油环一般由————和————组成。
7.在安装扭曲环时,还应注意将其内圈切槽向————,外圈切槽向————,不能反装。
8.活塞销通常做成————圆柱体.9.活塞销与活塞销座孔及连杆小头衬套孔的配合,一般都采用————。
10.连杆由————、————和————三部分组成。
连杆————与活塞销相连。
11.曲轴飞轮组主要由————和————以及其他不同作用的的零件和附件组成。
12.曲轴的曲拐数取决于发动机的————和————。
13.曲轴按支承型式的不同分为————和————;按节构型式的不同分为————和————曲轴;按加工方法的不同分为————和————。
14.曲轴前端装有驱动配气凸轮轴的————,驱动风扇和水泵的————制止推片等,有些中小型发动机的曲轴前端还装有————,以便必要时用人力转动曲轴.15.飞轮边缘一侧有指示气缸活塞位于上止点的标志,用以作为调整和检查————正时和————正时的依据.16.V8发动机的气缸数为————缸。
17.V8发动机全支承式曲轴的曲轴径数为————。
二.选择题(有一项或多项正确)1.曲柄连杆机构工作条件的特点时()A.高温B.高压C.高速D.化学腐蚀2.曲柄连杆机构在运动过程中受()作用A.气体作用力B.摩擦力C.运动质量惯性力D.外界阻力3.在做功行程时,面对发动机,气缸的()磨损严重.A.左侧B.右侧C.前部D.后部4.在压缩行程时,面对发动机,气缸的( )磨损严重。
A.左侧 B.右侧 C.前部 D.后部5.在将气缸盖用螺栓固定在气缸体上,拧紧螺栓时,应采取下列方法( )。
平面连杆机构练习题
平面连杆机构1一、单项选择题1、具有急回特性的四杆机构,其行程速度变化系数K的值(C )。
A. 1≤B. 1<C. 1>D. 1=2、在曲柄摇杆机构中,当摇杆为从动件时,最小传动角出现在(B)共线的位置。
A. 曲柄与连杆B. 曲柄与机架C. 摇杆与机架D. 摇杆与连杆3、铰链四杆机构有整转副的条件是:最短杆与最长杆长度之和(C)其余两杆长度之和。
A. <B. =C. ≤D. ≥4、四杆机构的急回特性是针对主动件作(A)而言的。
A. 等速转动B. 等速移动C. 变速转动D. 变速移动5、对心曲柄滑块机构以滑块为从动件时,其最小传动角 min出现在曲柄(A)的位置。
A. 垂直于滑块导路B. 垂直于连杆C. 与连杆共线D. 与机架共线6、如果铰链四杆机构中的最短杆与最长杆长度之和(A)其余两杆长度之和,则该机构中不存在整转副。
A. >B. ≥C. <D. ≤7、四杆机构的急回特性是针对从动件作(D)而言的。
A. 等速转动B. 等速移动C. 变速转动D.往复运动8、对心曲柄滑块机构以滑块为从动件时,其最大传动角g max为(C)。
A. ︒<9090 D. ︒45 C. ︒30 B. ︒9、对于双摇杆机构,最短构件与最长构件长度之和(B)大于其它两构件长度之和。
A. 一定B. 不一定C. 一定不D. 在最短构件为机架10、对于曲柄滑块机构,当曲柄作等速转动时,从动件滑块(B)具有急回特性。
A. 一定B. 不一定C. 一定不D. 在极限位置11、当连杆机构位置一定时,取不同构件为原动件,机构压力角的数值(B)。
A. 相同B. 不同C. 与原动件转向有关D. 与原动件转速大小有关12、铰链四杆机构中若最短杆与最长杆长度之和大于其他两杆长度之和,则机构中(C)。
A. 一定有曲柄存在B. 是否有曲柄存在取决于机架是否为最短构件C. 一定无曲柄存在D. 是否有曲柄存在取决于机架是否为最长构件二、填空题1、平面连杆机构是若干构件用低副连接组成的平面机构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大作业(一)平面连杆机构的运动分析(题号:4-B)班级:机制096学号:***********名:***同组其他人员:________________________完成日期:________________________平面连杆机构的运动分析题目试用计算机完成下列平面连杆机构的运动分析。
1.图a 所示的为一平面六杆机构。
假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及E 点的位移、速度和加速度的变化情况。
a )表1 平面六杆机构的尺寸参数(单位:mm )mm l 0.652=',mm x G 5.153=,mm y G 7.41=二、平面连杆机构的运动分析方程 1)位置分析 建立封闭矢量多边形 l 1+l 2=l 4+l 3;l 1+l 2 +l2’=AG +l 5 +l 6; (式1)将机构的封闭矢量方程式(1)写成在两坐标上的投影式,并改写成方程左边仅含未知量项的形式,即得(式2)由于牛顿迭代法不便于限制l5,l6的位置。
故在计算式采用复数矢量法直接求的。
求,;(1)(2)消去θ2得经整理后并可简化为式中:解之可得实际运动中0<θ3<180,故‘ +-’适当选择;求θ5,θ6 :先有则2)角速度分析E点速度;3)角加速度分析;E点加速度采用高斯消去法求角速度,角加速度;三、程序流程图源程序;#include<stdio.h>#include<stdlib.h>#include<math.h>#define PI 3.1415926#define N 4void Solutionangle(double [18],double ); /*矢量法求角位移*/ void Solutionspeed(double [N][N],double [N],double [18],double ); /*角速度求解*/void Solutionacceleration(double [N][N],double [N][N],double [N],double [18]);/*角加速度求解*/void GaussianE(double [N][N],double [N],double [N]);/*高斯消去*/void FoundmatrixA(double [18],double [N][N]); //创建系数矩阵Avoid FoundmatrixB(double [18],double ,double [N]);//创建系数矩阵Bvoid FoundmatrixDA(double [18],double [N][N]);//创建矩阵DAvoid FoundmatrixDB(double [18],double ,double [N]);//创建矩阵DB//定义全局变量double l1=26.5,l2=105.6,l3=67.5,l4=99.4,l5=37.4,l6=28.0;double l2g=65.0,xg=153.5,yg=41.7,inang=60*PI/180,as1=1.0;//主函数void main(){int i,j;FILE *fp;double shuju[36][18];double psvalue[18],a[N][N],da[N][N],b[N],db[N],ang1;//建立文件,并制表头if((fp=fopen("filel","w"))==NULL){printf("Cann't open this file.\n");exit(0);}fprintf(fp,"\n The Kinematic Parameters of Point 5\n");fprintf(fp," ang2 ang3 ang5 ang6");fprintf(fp," as2 as3 as5 as6");fprintf(fp," aas2 aas3 aas5 aas6");fprintf(fp," xe ye vex vey aex aey\n");//计算数据并写入文件for(i=0;i<36;i++){ang1=i*PI/18;Solutionangle(psvalue,ang1);FoundmatrixB(psvalue,ang1,b);FoundmatrixA(psvalue,a);Solutionspeed(a,b,psvalue,ang1);FoundmatrixDA(psvalue,da);FoundmatrixDB(psvalue,ang1,db);Solutionacceleration(a,da,db,psvalue);for(j=0;j<4;j++){shuju[i][j]=psvalue[j]*180/PI;}for(j=4;j<18;j++){shuju[i][j]=psvalue[j];}fprintf(fp,"\n");for(j=0;j<18;j++)fprintf(fp,"%12.3f",shuju[i][j]);}fclose(fp);//输出数据for(i=0;i<36;i++){ang1=i*PI/18;printf("\n输出ang1=%d时的求解\n",i*10);printf("angle angspeed angacceleration :\n");for(j=0;j<4;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=4;j<8;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=8;j<12;j++)printf("%lf\t",shuju[i][j]);printf("\n");for(j=12;j<18;j++)printf("%lf\t",shuju[i][j]);printf("\n");}}/*矢量法求角位移*/void Solutionangle(double value[18],double ang1){double xe,ye,A,B,C,phi,alpha,csn,ang5g,d2,d,ang2,ang3,ang5,ang6;A=2*l1*l3*sin(ang1);B=2*l3*(l1*cos(ang1)-l4);C=l2*l2-l1*l1-l3*l3-l4*l4+2*l1*l4*cos(ang1);ang3=2*atan((A+sqrt(A*A+B*B-C*C))/(B-C));if(ang3<0)//限定ang3大小{ang3=2*atan((A-sqrt(A*A+B*B-C*C))/(B-C));}ang2=asin((l3*sin(ang3)-l1*sin(ang1))/l2);xe=l4+l3*cos(ang3)+l2g*cos(ang2-inang);ye=l3*sin(ang3)+l2g*sin(ang2-inang);phi=atan2((yg-ye),(xg-xe));d2=(yg-ye)*(yg-ye)+(xg-xe)*(xg-xe);d=sqrt(d2);csn=(l5*l5+d2-l6*l6)/(2.0*l5*d);alpha=atan2(sqrt(1.0-csn*csn),csn);ang5g=phi-alpha;ang5=ang5g-PI;ang6=atan2(ye+l5*sin(ang5g)-yg,xe+l5*cos(ang5g)-xg);value[0]=ang2;value[1]=ang3;value[2]=ang5;value[3]=ang6;value[12]=xe;value[13]=ye;//限定角度大小for(int i=0;i<4;i++){while(value[i]>2*PI)value[i]-=2*PI;while(value[i]<0)value[i]+=2*PI;}}/*角速度求解*/void Solutionspeed(double a2[N][N],double b2[N],double value[18],double ang1){double ang2,ang3;ang2=value[0];ang3=value[1];double p2[N];GaussianE(a2,b2,p2);value[4]=p2[0];value[5]=p2[1];value[6]=p2[2];value[7]=p2[3];value[14]=-l3*value[5]*sin(ang3)-l2g*value[4]*sin(ang2-inang);value[15]=l3*value[5]*cos(ang3)+l2g*value[4]*cos(ang2-inang);}/*角加速度求解*/void Solutionacceleration(double a3[N][N],double da3[N][N],doubledb3[N],double value[18]){int i,j;double ang2,ang3;ang2=value[0];ang3=value[1];double bk[N]={0};double p3[N];for(i=0;i<N;i++){for(j=0;j<N;j++){bk[i]+=-da3[i][j]*value[4+j];}bk[i]+=db3[i]*as1;}GaussianE(a3,bk,p3);value[8]=p3[0];value[9]=p3[1];value[10]=p3[2];value[11]=p3[3];value[16]=-l3*value[9]*sin(ang3)-l3*value[5]*value[5]*cos(ang3)-l2g* value[8]*sin(ang2-inang)-l2g*value[4]*value[4]*cos(ang2-inang);value[17]=l3*value[9]*cos(ang3)-l3*value[5]*value[5]*sin(ang3)+l2g* value[8]*cos(ang2-inang)-l2g*value[4]*value[4]*sin(ang2-inang);}/*高斯消去法解矩阵方程*/void GaussianE(double a4[N][N],double b4[N],double p4[N]){int i,j,k;double a4g[N][N],b4g[N],t;for(i=0;i<N;i++)for(j=0;j<N;j++)a4g[i][j]=a4[i][j];for(i=0;i<N;i++)b4g[i]=b4[i];//施主对角线上的值竟可能大if(a4g[0][0]<a4g[1][0] && a4g[0][1]>a4g[1][1]){for(j=0;j<N;j++){t=a4g[0][j];a4g[0][j]=a4g[1][j];a4g[1][j]=t;}t=b4g[0];b4g[0]=b4g[1];b4g[1]=t;}if(a4g[2][2]<a4g[3][2] && a4g[2][3]>a4g[3][3]){for(j=0;j<N;j++){t=a4g[2][j];a4g[2][j]=a4g[3][j];a4g[3][j]=t;}t=b4g[2];b4g[2]=b4g[1];b4g[3]=t;}//初等行变换for(j=0;j<N;j++)for(i=0;i<N;i++){if(i!=j){for(k=0;k<N;k++)if(k!=j){a4g[i][k]-=a4g[i][j]/a4g[j][j]*a4g[j][k];}b4g[i]-=b4g[j]*a4g[i][j]/a4g[j][j];a4g[i][j]=0;}}for(i=0;i<N;i++)b4g[i]/=a4g[i][i];p4[0]=b4g[0];p4[1]=b4g[1];p4[2]=b4g[2];p4[3]=b4g[3];}//创建系数矩阵Avoid FoundmatrixA(double value5[18],double a5[N][N]){double ang2,ang3,ang5,ang6;ang2=value5[0];ang3=value5[1];ang5=value5[2];ang6=value5[3];a5[0][0]=-l2*sin(ang2);a5[0][1]=l3*sin(ang3);a5[1][0]=l2*cos(ang2);a5[1][1]=-l3*cos(ang3);a5[2][0]=-l2*sin(ang2)-l2g*sin(ang2-inang);a5[2][2]=l5*sin(ang5);a5[2][3]=l6*sin(ang6);a5[3][0]=l2*cos(ang2)+l2g*cos(ang2-inang);a5[3][2]=-l5*cos(ang5);a5[3][3]=-l6*cos(ang6);a5[0][2]=a5[0][3]=a5[1][2]=a5[1][3]=a5[2][1]=a5[3][1]=0;}//创建系数矩阵Bvoid FoundmatrixB(double value6[18],double ang1,double b6[N]){b6[0]=b6[2]=l1*sin(ang1)*as1;b6[1]=b6[3]=-l1*cos(ang1)*as1;}//创建矩阵DAvoid FoundmatrixDA(double value7[18],double da7[N][N]){double ang2,ang3,ang5,ang6,as2,as3,as5,as6;ang2=value7[0];ang3=value7[1];ang5=value7[2];ang6=value7[3];as2=value7[4];as3=value7[5];as5=value7[6];as6=value7[7];da7[0][0]=-l2*as2*cos(ang2);da7[0][1]=l3*as3*cos(ang3);da7[1][0]=-l2*as2*sin(ang2);da7[1][1]=l3*as3*sin(ang3);da7[2][0]=as2*(-l2*cos(ang2)-l2g*cos(ang2-inang));da7[2][2]=as5*l5*cos(ang5);da7[2][3]=as6*l6*cos(ang6);da7[3][0]=as2*(-l2*sin(ang2)-l2g*sin(ang2-inang));da7[3][2]=as5*l5*sin(ang5);da7[3][3]=as6*l6*sin(ang6);da7[0][2]=da7[0][3]=da7[1][2]=da7[1][3]=da7[2][1]=da7[3][1]=0; }//创建矩阵DBvoid FoundmatrixDB(double value8[18],double ang1,double db8[N]){db8[0]=db8[2]=l1*as1*cos(ang1);db8[1]=db8[3]=l1*as1*sin(ang1);}得出数据;jiao ang2 ang3 ang5 ang6 as2 as3 as5 as6 aas2 aas3 aas5 aas6 vex vey0 39.329 82.523 325.598 123.267 -0.364 -0.364 -2.106 -2.584 0.065 0.605 4.42 4.582 15.987 -25.3 -48.191 3.45810 35.791 79.453 308.065 101.37 -0.34 -0.247 -3.233 -3.736 0.192 0.71 -1.774 -6.069 7.346 -23.234 -49.638 19.20220 32.581 77.609 295.879 86.4 -0.3 -0.121 -2.877 -3.429 0.266 0.725 0.725 -3.084 -0.997 -19.033 -45.237 27.60230 29.828 77.021 286.688 76.547 -0.25 0.002 -2.704 -3.254 0.291 0.669 2.1 -1.259 -8.281 -14.038 -37.988 28.54640 27.579 77.594 278.84 70.118 -0.2 0.11 -2.713 -3.267 0.283 0.572 3.101 0.033 -14.228 -9.365 -30.199 24.40150 25.822 79.164 271.136 65.475 -0.152 0.2 -2.898 -3.514 0.258 0.462 4.358 1.42 -18.855 -5.654 -22.943 17.94460 24.514 81.54 262.355 60.628 -0.11 0.272 -3.264 -4.045 0.23 0.356 6.796 3.96 -22.282 -3.115 -16.445 11.22570 23.609 84.538 250.648 52.508 -0.072 0.325 -3.717 -4.794 0.203 0.26 12.436 10.302 -24.633 -1.682 -10.596 5.41180 23.059 87.993 233.633 36.895 -0.039 0.363 -3.706 -5.092 0.182 0.177 21.373 22.181 -26.009 -1.142 -5.241 1.02890 22.827 91.758 212.277 13.352 -0.008 0.388 -2.652 -4.097 0.166 0.105 19.269 23.261 -26.486 -1.23 -0.291 -1.772100 22.886 95.709 192.907 348.876 0.02 0.401 -1.39 -2.688 0.155 0.043 8.187 11.83 -26.134 -1.671 4.258 -3.03110 23.215 99.735 179.35 328.766 0.046 0.403 -0.633 -1.742 0.148 -0.013 2.177 4.612 -25.026 -2.207 8.349 -2.894120 23.803 103.74 171.086 313.49 0.071 0.396 -0.618 -1.321 0.144 -0.063 2.053 2.131 -23.252 -2.612 11.883 -1.569130 24.641 107.636 166.438 301.951 0.096 0.381 -0.335 -1.004 0.141 -0.108 1.238 1.535 -20.917 -2.7 14.749 0.688140 25.726 111.343 163.988 293.121 0.121 0.359 -0.172 -0.774 0.139 -0.149 0.668 1.136 -18.148 -2.335 16.845 3.578150 27.053 114.792 162.729 286.295 0.145 0.33 -0.092 -0.599 0.136 -0.185 0.272 0.88 -15.086 -1.434 18.104 6.765160 28.619 117.918 161.961 281.015 0.168 0.295 -0.07 -0.462 0.131 -0.216 -0.009 0.705 -11.878 0.023 18.515 9.895170 30.413 120.667 161.189 276.972 0.19 0.255 -0.09 -0.351 0.122 -0.242 -0.208 0.567 -8.668 1.997 18.144 12.626180 32.419 122.995 160.062 273.919 0.21 0.21 -0.139 -0.263 0.108 -0.262 -0.345 0.436 -5.582 4.39 17.137 14.66190 34.613 124.867 158.341 271.626 0.228 0.164 -0.208 -0.199 0.088 -0.276 -0.432 0.296 -2.711 7.061 15.715 15.783200 36.96 126.259 155.87 269.847 0.241 0.115 -0.288 -0.161 0.063 -0.285 -0.481 0.141 -0.105 9.839 14.15 15.88210 39.415 127.153 152.563 268.314 0.249 0.064 -0.374 -0.15 0.031 -0.291 -0.503 -0.021 2.237 12.543 12.732 14.933220 41.924 127.541 148.38 266.744 0.251 0.013 -0.462 -0.168 -0.006 -0.294 -0.506 -0.18 4.364 14.994 11.731 12.997230 44.421 127.416 143.317 264.862 0.247 -0.038 -0.55 -0.212 -0.049 -0.298 -0.496 -0.319 6.369 17.027 11.37 10.16240 46.833 126.77 137.39 262.43 0.234 -0.091 -0.635 -0.277 -0.096 -0.303 -0.474 -0.417 8.379 18.493 11.797 6.506250 49.076 125.596 130.639 259.278 0.213 -0.144 -0.715 -0.354 -0.149 -0.309 -0.441 -0.456 10.536 19.253 13.061 2.079260 51.059 123.882 123.118 255.341 0.182 -0.199 -0.788 -0.432 -0.206 -0.318 -0.403 -0.428 12.982 19.173 15.078 -3.129270 52.683 121.614 114.892 250.666 0.141 -0.255 -0.856 -0.5 -0.266-0.326 -0.376 -0.342 15.828 18.113 17.578 -9.172280 53.843 118.776 106.005 245.397 0.089 -0.313 -0.922 -0.55 -0.328 -0.332 -0.383 -0.237 19.116 15.92 20.031 -16.099290 54.431 115.361 96.438 239.706 0.027 -0.37 -0.994 -0.586 -0.386 -0.329 -0.46 -0.188 22.767 12.446 21.555 -23.818300 54.348 111.373 86.051 233.663 -0.045 -0.426 -1.089 -0.626 -0.433 -0.307 -0.658 -0.316 26.513 7.586 20.875 -31.863310 53.512 106.854 74.482 227.008 -0.123 -0.476 -1.237 -0.72 -0.457 -0.253 -1.097 -0.862 29.836 1.371 16.468 -15.719320 51.885 101.9 60.917 218.711 -0.202 -0.512 -1.505 -0.983 -0.442 -0.153 -2.11 -2.388 31.97 -5.876 7.096 -15.719330 49.493 96.686 43.514 205.974 -0.274 -0.526 -2.034 -1.659 -0.376 0.002 -4.052 -5.6 32.023 -13.395 -7.196 -15.719340 46.454 91.482 19.363 183.783 -0.33 -0.509 -2.78 -2.796 -0.255 0.204 -3.32 -5.95 29.302 -19.97 -24.083 -15.719350 42.975 86.637 350.437 152.646 -0.361 -0.454 -2.818 -3.205 -0.096 0.422 2.827 1.495 -15.719 -15.719 -15.719 -15.719。