材料分析方法第7章
第7章 LS-DYNA材料模型之金属、橡胶、泡沫分析
材料特性例子
橡胶 超弹性材料 (something really stretchy) 响应与路径无关 通常认为是不可压缩的,因为体积模量在数量上远远超过 剪切模量 7 *MAT_BLATZ-KO_RUBBER 27 *MAT_MOONEY-RIVLIN_RUBBER 31 *MAT_FRAZER-NASH_RUBBER 77 *MAT_HYPERELASTIC_RUBBER 77 *MAT_OGDEN_RUBBER 87 *MAT_CELLULAR_RUBBER
*MAT_BARLAT_ANISOTROPIC_PLASTICITY
*MAT_PLASTIC_GREEN-NAGHDI_RATE *MAT_3-PARAMETER-BARLAT *MAT_TRANSVERSELY_ANISOTROPIC *MAT_BAMMAN_DAMAGE *MAT_RATE_SENSITIVE_POWERLAW *MAT_MODIFIED_ZERILLI_ARMSTRONG
*MAT_ORTHOTROPIC_ELASTIC *MAT_ANISOTROPIC_ELASTIC *MAT_RESULTANT_PLASTICITY *MAT_CLOSED_FORM_SHELL_PLASTICITY
*MAT_ELASTIC_PLASTIC_HYDRO
*MAT_STEINBERG *MAT_ISOTROPIC_ELASTIC_PLASTIC *MAT_JOHNSON_COOK *MAT_ORIENTED_CRACK *MAT_POWER_LAW_PLASTICITY *MAT_STRAIN_RATE_DEPENDENT *MAT_PLASTICITY_WITH_DAMAGE ----
更多其它的
1 *MAT_ELASTIC
第7章、粘弹性分析
第七章、粘弹性7.1 基本概念弹性:外力 外力撤除 粘弹性 弹性+粘性 →形变 →应力 →储存能量→能量释放 →形变恢复 粘性:外力 外力撤除 →形变 →应力 →应力松弛 →永久形变→能量耗散理想弹性:服从虎克定律σ=E·ε应力与应变成正比,即应力只取决于应变。
εtσ/Et t 0dt d εησ⋅=εtσ/ηt 0 理想粘性:服从牛顿流体定律 应力与应变速率成正比,即应力只取决于应变速率 dt d εησ⋅=牛顿流体定律的比例常数为粘度ηdtd εησ⋅=dtdx y y x dt d dt d ⋅==1)(εyx应变速率为速度梯度∴粘度η等于单位速度梯度时的剪切应力,反映了分子间由于相互作用而产生的流动阻力,即内摩擦力的大小,单位为Pa·S弹性(1)储能:能量储为应变能(2)可逆:记忆形状,(3)瞬时:不依赖时间E=E(σ, ε, T)虎克固体(1)耗能:能量耗为热能(2)不可逆:无形状记忆(3)依时:应变随时间发展E=E(σ, ε ,T, t)牛顿流体粘性熵弹性聚合物是典型的粘弹体聚合物是典型的粘弹体粘性:分子链滑移,应力松弛拉伸应力松弛聚合物的应力松弛:t7.2 静态粘弹性受恒定应力或应变的作用E=E(σ, ε ,T, t)7.2.1 静态粘弹性现象(1)蠕变:在一定的温度和恒定应力的作用下,观察试样的应变随时间增加而增大的现象。
理想弹性体:σ=E·εεtσ/E应力恒定,故应变恒定εtσ/η理想粘性体 dtd εησ⋅=应力恒定,故应变速率为常数,应变以恒定速率增加聚合物:粘弹体①理想弹性,即瞬时响应: 由键长、键角提供②推迟弹性形变,即滞弹部分:③粘性流动:链段运动整链滑移 εt①③ ②εt εt线形聚合物 交联聚合物(2)应力松弛:在一定的温度和恒定应变的作用下,观察试样的应力随时间增加而衰减的现象。
σtE·ε理想弹性体:σ=E·ε 应变恒定,故应力恒定σt理想粘性体 dtd εησ⋅=应变恒定,应变速率为0,故应力为0聚合物:粘弹体σ tσ0交联聚合物线形聚合物由于交联聚合物分子链的质心不能位移,应力只能松驰到平衡值7.2.2. 线性粘弹性模型线性粘弹性:可由服从虎克定律的线性弹性行为和服从牛顿定律的线性粘性行为的组合来描述的粘弹性。
第7章-哈工大-第三版-材料分析测试-周玉讲解
15
图7-12 多晶铝的衍射图 a) 铝粉 b) 冷轧铝板
第二节 织构的种类和表示方法
一、极图 织构可用极图、反极图和取向分布函数3种方法表示,极 图常用于描述板织构 多晶体中某晶面001法向,在空间分布的极射赤面投影图称 001极图, 板织构取轧面为宏 观坐标面的投影面,而丝织构取 与丝轴平行或垂直的平面 图7-10是轧制纯铝板以轧面为投 影面的极图,用不同级别的等密 度线表示极点密度的分布
2 1 2 1 2 1 2 2 2 2 2 2
与点
阵常数无关,标准投影图对于不同点阵常数的立方晶体普 遍适用;因立方晶系同名的晶面和晶向垂直,其标准投影 图同时可用于晶面和晶向 非立方晶系的晶面间夹角与点阵常数有关,故无法制作普 遍适用的标准衍射图 12
第一节 极射赤面投影法
三、单晶体的标准投影图 图7-9为立方晶系标准投影图,落在同一大圆弧和直线上的极 点对应的晶面法线在同一平面上, 此平面的法线为这些晶面 的交线。相交于同一直线的晶面属于同一晶带, 其交线称为 晶带轴,用[uvw]表示,晶面指数(hkl)和[uvw]满足晶带定律
图7-7 极点绕倾斜轴转动
10
第一节 极射赤面投影法
二、乌氏网 5) 投影面的转换 在乌氏网上将极点绕确定轴转动到新位置
如图7-8, K、P、Q是以 O 为
投影面的极点, 将K转到投影 面基圆中心, P、Q 随之作相 同的转动,沿其各自的纬线到 达新位置 P1、Q1,这就是 P、
Q点以K为新投影面的位置
h : k : l a sin cos : b sin sin : c cos
冷压磷钢 板的ODF截面图
21
第三节 丝织构指数的测定
第07章、LR分析法
10
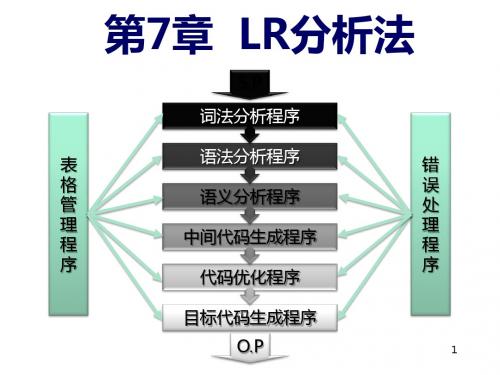
三、 LR分析器
1. LR分析器的组成 由3部分组成:总控程序、分析表、分析栈。 2. LR分析器的构造 (1) 构造识别文法活前缀的确定有限自动机 (2) 根据该自动机构造相应的分析表(ACTION表、GOTO表)
圆点不在产生式右部最左边的项目称为核,唯一的 例外是S’ → • S。因此用GO(I,X)转换函数得到的J为 转向后状态所含项目集的核。 使用闭包函数(CLOSURE)和转换函数(GO (I,X)) 构造文法G’的LR(0)的项目集规范族,步骤如下: (1) 置项目S’→ • S为初态集的核,然后对核求闭包 CLOSURE({S’→ • S})得到初态的项目集; (2) 对初态集或其它所构造的项目集应用转换函数GO (I,X)= CLOSURE(J)求出新状态J的项目集; (3) 重复(2)直到不出现新的项目集为止。
28
例:文法G[S]: (1) S → aAcBe (2) A → b (3) A → Ab (4) B → d
a S2 ACTION c e b d # acc S5 r2 r3 r4 r1 S4 S6 r2 r3 r4 r1 3 r2 S8 r3 r4 r1 r2 r3 r4 r1 GOTO S A B 1
是否推导出abbcde?
每次归约句型的 前部分依次为: ab[2] aAb[3] aAcd[4] aAcBe[1]
9
二、LR分析要解决的问题
• LR分析需要构造识别活前缀的有穷自动机
可以把文法的终结符和非终结符都看成有 穷自动机的输入符号,每次把一个符号进 栈看成已识别过了该符号,同时状态进行 转换,当识别到可归前缀时,相当于在栈 中形成句柄,认为达到了识别句柄的终态。
7-第七章 金属材料焊接性分析方法(焊工工艺-第3版)
图7-3 采用焊条电弧焊时,试验焊缝位置
第二节 金属焊接性评定与试验
图7-4 采用焊条自动送进装置焊接试验焊缝位置
第一节 金属的焊接性
第二节 金属焊接性评定与试验
二、常用的焊接性试验方法 由前述可知,焊接性试验方法种类很多,因抗裂性能是衡量金
属焊接性的主要标志,所以在生产中还是常用焊接裂纹试验来表征 材料的焊接性。以下主要介绍几种常用的焊接性试验方法。 1.间接试验法
碳当量鉴定法是判断焊接性的最简便的间接法,常用作焊接冷 裂纹的间接评定。所谓碳当量法,就是将包括碳在内的其他合金元 素对硬化(脆化和冷裂等)的影响折合成碳的影响。
第一节 金属的焊接性
(3)结构因素 焊接接头和结构设计会影响应力状态,从而对焊 接性也发生影响。
这里主要从结构的刚度、应力集中和多向应力等方面来考虑。 使焊接接头处于刚度较小的状态,能够自由收缩,有利于防止焊接 裂纹。缺口、截面突变、焊缝余高过大、交叉焊缝等容易引起应力 集中,要尽量避免。不必要地增大母材厚度或焊缝体积,会产生多 向应力,也应注意防止。
第七章 金属材料 焊接性分析方法
第一节 金属的焊接性
一、金属焊接性的概念 1.定义:金属焊接性是指材料在限定的施工条件下焊接成按规定设 计要求的构件,并满足预定服役要求的能力,即金属材料对焊接加 工时适应性。 2.特点:焊接性受材料、焊接方法、构件类型及使用要求四个因素 的影响。根据上述定义,优质的焊接接头应具备两个特点:即接头 中不允许存在超过质量标准规定的缺陷;同时具有预期的使用性能。 根据讨论问题的着眼点不同,焊接性又分为工艺焊接性和使用焊接 性。
材料力学-7-应力状态分析
7.1 应力状态的基本概念
y
y
1 1 4
z
4
Mz
x
x
l
S FP
2
3
Mx
z
3
a
第7章 应力状态分析
7.2 平面应力状态任意方向面上的应力 ——解析法
7.2 平面应力状态任意方向面上的应力 ——解析法
一、方向角与应力分量的正负号约定
x
正应力
x
x
拉为正
压为负
x
7.2 平面应力状态任意方向面上的应力 ——解析法
?
第7章 应力状态分析 7.1 应力状态的基本概念
7.2 平面应力状态任意方向面上的应力 ——解析法 7.3 主应力、主平面与面内最大切应力 ——解析法 7.4 应力圆及其应用——图解法
7.5 三向应力状态的特例分析
7.6 广义胡克定律
7.7 应变能密度
第7章 应力状态分析
tan 2q p=- 2 τ
xy
x y
主平面(principal plane):切应力q=0的方向面,用 qp表示。 主应力(principal stress):主平面上的正应力。 主方向(principal directions):主平面法线方向,用方 向角qp表示。
7.3 主应力、主平面与面内最大切应力 ——解析法
第7章 应力状态分析
第7章 应力状态分析
1
3
2
max
max
拉压、弯曲正应力 扭转、弯曲切应力
这些强度问题的共同特点是:
1、危险截面上的危险点只承受正应力 或切应力; 2、都是通过实验直接确定失效时的极限应力,并以此为依据建立强度 设计准则。 复杂受力:危险截面上危险点同时承受正 应力和切应力,或者危险点的其他面上同 时承受正应力或切应力。 → 强度条件
第七章 颗粒物标准分析方法
第七章颗粒物标准分析方法1、过滤称重法的准确性取决于从烟道中抽取的那部分烟气样品能否代表烟道中整个断面烟尘分布状况,这就要求采样点处烟道断面的气流和烟尘浓度得到分布应当是相当均匀或有较确定的规律性。
2、根据烟尘采样必须等速的原则,即含尘排气进入采样嘴的抽泣流速必须和烟道内该点排气的速度相等。
烟尘采样方式分为预测流速法,平行采样法和等速管采样法三种。
3、平行采样法是在采样过程中,测定排气的流速和烟尘采样同时进行。
其方法是将S型皮托管和采样管固定在一起,同时插入烟道采样点出,当与S型皮托管链接的微压计指示动压时,先用预绘制的皮托管动压和等速采样流量关系曲线,及时算出采样流量并进行采样。
平行采样法的流量计算与预测流速相同。
4、等速管采样法分为动压平衡和静压平衡两种方式,它不需要预先测出气体流速和气态参数来计算等速采样流量,只需通过调节压力即可进行等速采样,动压平衡等速采样法是利用采样管上装置的孔板差压与皮托管的采样点气体动压相平衡来事先等速采样,静压平衡等速采样法是利用采样嘴内外静压相平衡来实现等速采样。
5、简答:优缺点预测流速法操作过程复杂,计算繁琐,所需时间长,在烟道流速变化时,还需要重新计算,调整采样流量,特别是在烟道流速波动大的情况下,采样精度无法保证。
它仅适用于排气流速比较稳定的固定污染源监测。
平行采样法不需要预先测定流速,可以在采样的同事跟踪排气流速的变化,调整采样流量,操作简便,采样精度较预测流速法高。
等速管采样法其采样精度较高操作简便,但是,当烟尘浓度较大时,测孔易堵塞,在3m/s以下流速使用时,误差较大。
6、预测流速法烟尘采样系统采样嘴、滤筒、采样管、冷凝器、干燥器、温度计、压力计、转子流量计、累计流量计和抽气泵组成。
7、预测流速法采样管分为玻璃纤维滤筒和刚玉滤筒采样管两种。
8、玻璃纤维采样嘴的结构与外形应以不扰动吸气口内外气流为原则,采样嘴入口角度应小于45°的锐角。
9、采样泵一般选择刮板抽气泵,流量在60L/min以上,以克服管道负压和测量管线各部分阻力。
材料断口分析(第七—八章)
解理台阶的蚀坑
河流花样的蚀坑
19
二、断口的定量分析技术
1、定量分析内容 断口电子图象中特征花样的定量分析
如:韧窝大小、解理程度、第二相分布等 断口形貌参数与断裂力学参量之间关系的定量分析
如:疲劳辉纹间距与△K之间的关系
20
2、定量分析方法 点截法(网格法)
特征形貌的定量测量值n% = 断口形貌特征点数÷总的点数
挤压(拉拔)开裂 锻造开裂 断裂原因: ◆塑性变形不均匀 ◆铸锭质量差,如铸造时产生的疏松、偏析等 ◆加工工艺不合理,如温度过高造成过热、过烧
26
一、轧制时的断裂
板材端部呈圆形 轧件通过辊缝时,沿宽向各点均有横向流动的趋势, 由于受到摩擦阻力的影响,中心部分宽展远小于边 部,此时中心部分厚度的减少将转化为长度的增加 而边部厚度的减少则有部分转化为宽展,所以板材 端部呈圆形。
12
§2 断口的一般分析技术
一、宏观断口分析技术 指用肉眼、放大镜、体视显微镜等来观察分析断 口的宏观形貌特征的一种方法。
二、微观断口分析技术 扫描电子显微镜 光学显微镜 透射电子显微镜
13
断口分析的主要技术手段
分析手段
放大倍数
功能
肉眼检查 放大镜 体视显微镜 金相显微镜
透射电子显微镜
1-10 1-100
2
2、分叉法 一般情况下,裂纹分叉的方向为裂纹扩展方向, 其反方向指向裂纹源O点处。即分叉裂纹为二次裂 纹(B、C、D),汇合裂纹为主裂纹A。
3
3、变形法 根据变形量的大小来判别。变形量大的部位为主 裂纹A,其它部位为二次裂纹,裂源在主裂纹所 形成的断口上。
4
的现象 确定。氧化或腐蚀严重的部位是主裂纹部位, 较轻的部位是二次裂纹部位,裂源在主裂纹的 表面处。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
hu + kv + lw = 0
(7-1)
(001)
(011)
(111) 13
图7-9 立方晶系标准投影图
第二节 织构的种类和表示方法
织构按择优取向分布特点分类 1) 丝织构 是一种晶粒取向为轴对称分布的织构
存在于拉、轧或挤压成形的丝、棒材和表面镀层中。 特点是 各晶粒某取向uvw与丝轴或镀层表面法线平行,用uvw表示 丝织构指数; 也可采用极射赤面投影表示晶粒取向的分布, 称为晶向或晶面的极图, 以说明某一晶向或晶面在宏观坐标 面的投影,见图7-10 若多晶体中的晶粒取 向混乱分布,极点分 布是均匀的;当有丝 织构存在时,极点相 对于丝轴 FA 呈旋转 14 对称分布
三、三维取向分布函数(ODF) ODF图是三维的,通常给出一组恒 截 面图,如图7-20所示。图中可显示取向 密度及对应织构组分的漫散程度 由w(、、 )可计算相应的织构指数, uvw hkl,如正交晶系
:v: (cos cos cos :sin ) / a : u:v:w u (cos w cos cos sin sin sin )/a ( cos cos sin sin ( cos cos sin sin cos ) / b :cos ) / b : (sin (sin cos ) / c cos ) / c 图7-20
图7-1 极射赤面投影法
4
第一节 极射赤面投影法
二、乌氏网 如图7-2a,为确定极点在极射赤面投影面上的位置,以 及 测量各极点间的夹角,需在参考球上建立坐标网 取参考球的一直径NS作为南北极,过球心O且垂直于NS的大 圆称为赤道,平行于赤道大圆的一系 列等角距离平面与参考球交成纬线, 通过NS轴的等角距离平面与球面交 成 经线 球面上某极点 M 的位置可用经度( )
由图7-21的几何关系,可求出hkl面法线与丝轴的夹角, 由 此求出与丝轴平行的晶 向指数uvw cos = cos cos (7-6)
在底片上测 和 ,并标 定衍射指数hkl,由上式 即可求出 角
22
理想丝织构
实际丝织构
图7-21 丝织构的倒易点阵图解
X射线衍射是织构测定的主要方法,近年来电子背散射衍 射(EBSD)技术在织构分析方面亦得到广泛应用
3
第一节 极射赤面投影法
一、极射赤面投影法的特点 极射赤面投影法用以表达晶向、晶面的方位,见图7-1 1) 被投影晶体置于参考球球心O,假定晶体的所有晶向、晶 面均通过球心 2) 投射点B为球面上一点的射线,投影 面是与过B点直径垂直的任一平面,平 行于投影面且通过球心的平面与球交成 一大圆, B点向大圆上各点的投影线在 投影面上的交点构成基圆(NESW) 3) 晶向或晶面法线与球面交点称露出点, 投影线与投影面的交点即为晶向或晶面 的投影点,称极点
图7-8 投影面的转换
11
第一节 极射赤面投影法
三、单晶体的标准投影图
极射赤面投影可以用一个点简明方便地表示晶体中一组晶 向和晶面
对于某种点阵结构的单晶体,选择某一低指数的重要晶面 作为投影面,将各晶面向其投影,即可得到单晶体的标准 衍射图 立方晶系的晶面间夹角 cos
h1h2 k1k2 l1l2 (h k l )(h k l )
2
第七章 多晶体织构的测定
理想多晶体中各晶粒的取向呈无规分布,宏观上表现为各 向同性 实际的多晶体材料的晶粒存在择优取向,称这种组织状态 为织构 多晶体材料织构的形成往往与其制备和加工过程有关,如 铸造、镀膜、塑性变形、退火等
织构使多晶体材料的物理、化学、力学等性能发生各向异 性。这种性质有时是有害的,有时又是有益的
图7-3
二、乌氏网 3) 与已知极点成等夹角点的轨迹如图7-4所示。首先转动投影 图中已知极点P 位于乌氏网的赤道线上 在P点两侧定出 2 个等角距离点(如Q、R),以Q、R连线中点 P为圆心作圆,此小圆即为与P 点成等角点的轨迹; 在过P 的经线大圆上及赤道线上 定出等角的点M、T及Q,此3点 所在的圆为欲求的轨迹; 与P点成90点的轨迹为过赤道线 上F 点的经线大圆NFS,NFS可 视为一平面的投影,其法线的投 8 图7-4 与极点成等夹角点的轨迹 影点为P
图7-11 冷轧铝丝的 平板针孔相
15
图7-12 多晶铝的衍射图 a) 铝粉 b) 冷轧铝板
第二节 织构的种类和表示方法
一、极图 织构可用极图、反极图和取向分布函数3种方法表示,极 图常用于描述板织构 多晶体中某晶面001法向,在空间分布的极射赤面投影图称 001极图, 板织构取轧面为宏 观坐标面的投影面,而丝织构取 与丝轴平行或垂直的平面 图7-10是轧制纯铝板以轧面为投 影面的极图,用不同级别的等密 度线表示极点密度的分布
图7-14 反极图所取的单位投影三角形 a) 立方晶系 b) 六方晶系 c) 正交晶系
图7-15 反极图投 影关系示意图
17
第二节 织构的种类和表示方法
二、反极图 如图7-16, 在001和111极点处有较高的轴密度, 说明铝 棒各晶粒的111或 001趋向与棒轴平行,存在111、 001 双织构。确定板织构至少需要2张反极图 (如图7-17),冷轧黄 铜板的RD和ND反极图各有2个高轴密度区,可确定其织构指 数为, 112 110、 001 110和112 111
图7-2a 参考球上的坐标网
和纬度( )表示
5
第一节 极射赤面投影法
二、乌氏网 在图7-2a中,若以赤道平面上一点(如E点)为投射点,投 影面平行于NS轴,此投影为乌氏网,见图7-2b 若以N或S为投影点,投影面平行于赤道平面,可得到极网, 见图7-2c
图7-2 b) 乌氏网 c) 极网
6
第一节 极射赤面投影法
第一篇 材料X射线衍射分析
第一章 X射线物理学基础
第二章 X射线衍射方向
第三章 X射线衍射强度
第四章 多晶体分析方法
第五章 物相分析及点阵参数精确测定
第六章 宏观残余应力的测定
第七章 多晶体织构的测定
1
第七章 多晶体织构的测定
本章主要内容 第一节 极射赤面投影法
第二节 织构的种类和表示方法
第三节 丝织构指数的测定 第四节 极图的测定 第五节 反极图的测定
RD
ND
图7-16 挤压铝棒的轴向反极图
图7-17 冷轧黄铜板的反极图
18
第二节 织构的种类和表示方法
三、三维取向分布函数(ODF) ODF用3个参数在三维空间定量表达多晶材料的晶粒取向 分布。设OABC为宏观坐标系,通常对于板材,取RD为OA, TD为OB,ND为OC; OXYZ是晶粒坐标系, 对正交等晶系, [100]为OX,[010]为OY,[001]为OZ。多晶体中晶粒相对于宏 观坐标的取向用欧拉角(、、 )表示,转动方法见图7-18
2 1 2 1 2 1 2 2 2 2 2 2
与点
阵常数无关,标准投影图对于不同点阵常数的立方晶体普 遍适用;因立方晶系同名的晶面和晶向垂直,其标准投影 图同时可用于晶面和晶向 非立方晶系的晶面间夹角与点阵常数有关,故无法制作普 遍适用的标准衍射图 12
第一节 极射赤面投影法
三、单晶体的标准投影图 图7-9为立方晶系标准投影图,落在同一大圆弧和直线上的极 点对应的晶面法线在同一平面上, 此平面的法线为这些晶面 的交线。相交于同一直线的晶面属于同一晶带, 其交线称为 晶带轴,用[uvw]表示,晶面指数(hkl)和[uvw]满足晶带定律
图7-7 极点绕倾斜轴转动
10
第一节 极射赤面投影法
二、乌氏网 5) 投影面的转换 在乌氏网上将极点绕确定轴转动到新位置
如图7-8, K、P、Q是以 O 为
投影面的极点, 将K转到投影 面基圆中心, P、Q 随之作相 同的转动,沿其各自的纬线到 达新位置 P1、Q1,这就是 P、
Q点以K为新投影面的位置
二、乌氏网 乌氏网是确定晶体方位及测量夹角的工具,应用时注意 1) 晶体投影图基圆的直径与乌氏网相同,使用时将二者中心 重合 2) 测定二极点间夹角时,转动投 影图,使二极点位于同一经线大 圆(包括基圆)或赤道上, 二点间 的纬度差或经度差极为二极点间 夹角,见图7-3。 如A、B极点间 夹角为120, C、D极点间夹角 为20, E、F 极点间夹角为20
图7-10 不同取向状态的多晶体极图示意图 a) 无序取向 b) 丝织构 c) 板织构
第二节 织构的种类和表示方法
织构按择优取向分布特点分类 2) 板织构 存在于轧制或旋压成形的板材、片状构件。特点是 各晶粒某晶向uvw与轧向(RD)平行,各晶粒某晶面hkl与轧 面平行,用uvw hkl表示板织构指数 图7-10c 是轧面为投影面, 立方织构材 料的001极图示意图。 材料中存在织 构时,将影响倒易 球面上倒易阵点的 分布,亦影响各晶 面衍射强度的相对 变化,见图7-11和 图7-12
h : k : l a sin cos : b sin sin : c cos
冷压磷钢 板的ODF截面图
21
第三节 丝织构指数的测定
平板针孔法 拍摄平板针孔相是最简单的方法, 图7-21是其反射球图解。 存在丝织构时,某 hkl 倒易阵点以丝轴FA为轴,旋转对称分 布在其倒易球面上而构成环带,衍射花样呈点状;实际织构 材料晶粒取向存在一定漫散,衍射花样呈圆弧状
图7-5 极点绕垂直于 投影面的轴转动 图7-6 极点绕平行于 投影面的轴转动
9
第一节 极射赤面投影法
二、乌氏网 4) 极点的转动 在乌氏网上可将极点绕确定轴转动到新位置
转轴与投影面成任意夹角:如图7-7,转轴的投影为B1点,使 A1点绕B1轴顺时针转动40的步骤为,① 将B1 置于赤道线上; ② 将A1和B1同时绕NS轴转动至B1 到达基圆圆心,称为B2, A1点在 其纬线上到达A2; ③ A2 绕B2按预 定方向转40到达A3; ④ B2绕 NS 轴转至原位B1, A3沿其纬线相应 转至A4, A4即为A1点绕 B1轴顺时 针转动40后的新位置