第三章平衡精度1
平衡机精度等级计算

平衡机精度等级计算平衡机是一种用于消除旋转机械的动平衡不平衡量的设备,它能够减小或消除机械的振动,提高机械的工作效率和寿命。
平衡机的精度等级是评估平衡机精度的指标,下面将详细介绍平衡机精度等级的计算方法。
首先计算平衡机测量系统的误差。
测量系统的误差主要包括传感器的误差和信号处理的误差。
传感器的误差可以通过标定和校准来确定,校准后的传感器误差可以用正态分布来表示。
信号处理的误差可以通过数理统计方法来估计。
将传感器的误差和信号处理的误差相加,即得到平衡机测量系统的误差。
然后计算平衡机的动态特性。
动态特性主要包括转速测量的误差和过程控制的误差。
转速测量的误差可以通过转速传感器的标定和校准来确定,校准后的转速测量误差可以用正态分布来表示。
过程控制的误差可以通过控制系统的模型和控制算法来分析和估计,可以用其中一种概率分布来表示。
最后,将测量系统误差和动态特性误差相加,即得到平衡机的总误差。
根据平衡机总误差的大小,可以将平衡机划分为不同的精度等级。
一般来说,平衡机的精度等级分为A、B、C、D四个等级,其中A级精度最高,D级精度最低。
不同等级的平衡机适用于不同的精度要求,精度要求越高,平衡机的精度等级就越高。
需要注意的是,平衡机的精度等级并不是绝对的,它是根据国家或行业标准规定的。
不同的国家或行业可能有不同的标准和要求,因此在进行平衡机精度等级计算时,应该参考相应的标准和规范,以确保计算结果的准确性和可靠性。
总之,平衡机的精度等级是评估平衡机精度的重要指标,计算平衡机精度等级需要考虑平衡机的测量系统误差和动态特性误差。
通过计算和分析这些误差,可以确定平衡机的总误差,进而划分出不同的精度等级。
平衡机的精度等级是根据国家或行业标准规定的,不同的标准和要求可能导致不同的计算结果。
因此,在进行平衡机精度等级计算时应该参考相应的标准和规范,以确保计算结果的准确性和可靠性。
动平衡精度等级与计算
动平衡精度等级与计算动平衡是机械制造过程中非常重要的一环,它的精度等级与计算是确保机械设备正常运行和提高工作效率的关键。
本文将详细介绍动平衡精度等级的概念以及相关的计算方法。
一、动平衡精度等级的概念动平衡是指在旋转运动机械设备中,通过在转子上添加试重块,使转子旋转时不产生振动,达到平衡状态的一种技术手段。
动平衡精度等级是用来描述动平衡状态的稳定性和精确程度的指标。
按照国际标准ISO1940-1:2003的规定,动平衡精度等级分为六个等级,分别为G1.0、G0.4、G0.7、G2.5、G6.3和G16、其中,G表示全转子高峰值的一半。
精度等级越高,转子的平衡状态越稳定,振动幅度越小,对设备的损伤和干扰越小。
二、计算动平衡精度等级的方法计算动平衡精度等级需要先了解转子的质量不平衡情况,然后根据一定的数学模型进行计算,最终确定转子的动平衡精度等级。
1.质量不平衡计算质量不平衡是指转子上的实际质量分布与理想平衡状态之间的差异。
一般情况下,质量不平衡是通过试重块进行补偿的。
质量不平衡的计算可以通过静态平衡试验和动态平衡试验两种方法进行。
在动态平衡试验中,可以通过测量转子不同时刻的振动加速度或位移信号,进而计算得出质量不平衡。
2.动平衡精度等级计算具体的计算公式如下:G=K1×(ΔW/m)×K2其中,G为动平衡精度等级,K1和K2为修正系数,ΔW为质量不平衡量,m为转子质量。
在计算过程中,需要根据具体的机械设备和转子参数确定修正系数的数值。
三、动平衡精度等级的影响因素1.转子结构和质量分布:不同结构的转子,质量不平衡分布不同,对动平衡精度等级有一定影响。
2.转子转速:转子在不同转速下,质量不平衡对振动的影响程度也不同,因此转速是影响动平衡精度等级的重要因素。
3.转子质量和转子材料:转子质量和材料的不同会对动平衡的要求产生影响,转子质量越大、材料越均匀,要求的动平衡精度等级也相应提高。
4.平衡设备性能:平衡设备的性能和调节方法也会对动平衡精度等级产生影响,高性能的平衡设备能更准确地实现动平衡。
提高传动轴动平衡精度的方法

提高传动轴动平衡精度的方法提高传动轴动平衡精度的方法随着机械制造技术的不断发展,传动轴作为一种重要的机械零部件,在各种机械设备中得到了广泛应用。
在传动轴的使用过程中,由于各种因素的影响,可能会导致传动轴出现不平衡的情况,进而影响机械设备的使用效果。
因此,提高传动轴动平衡精度是一项非常重要的工作。
本文就提高传动轴动平衡精度的方法进行探讨。
第一章传动轴动平衡精度的概述传动轴的动平衡精度是指在轴的自转或受到外部作用时,轴旋转的重心与轴心的距离偏差,即轴的不平衡量。
传动轴的动平衡精度对机械设备的运行效率、质量以及寿命等方面都有着重要的影响。
因此,提高传动轴动平衡精度是保证机械设备正常运行的必要条件之一。
第二章传动轴动平衡精度提高的原理传动轴动平衡精度的提高可以通过降低轴的不平衡量来实现。
因此需要对传动轴的不平衡原因进行深入研究。
一般来说,轴的不平衡是由于轴本身的制造误差、装配误差、外部作用力等多种因素造成的。
轴的制造误差主要包括轴的直径、长度、曲率等方面的误差;装配误差包括轴的安装位置、安装角度、安装力矩等方面的误差;外部作用力包括轴的受力、压力、温度、润滑等方面的作用。
因此,提高传动轴动平衡精度需要从这些方面入手,采取相应的措施进行改进。
第三章传动轴动平衡精度提高的基本方法1.传动轴的制造通过提高轴的加工精度,减少轴的制造误差,可以有效地降低轴的不平衡量。
具体而言,要注意轴的直径、长度、曲率等方面的精度掌握,采用精度更高的加工设备和工艺技术,进行精细加工。
同时,在加工过程中要保证轴的工艺参数的合理性,防止轴的加热、弯曲等不良现象。
2.传动轴的装配在轴的装配过程中,要保证装配的精度,防止装配误差的发生。
具体而言,要注意轴的安装位置、安装角度、安装力矩等方面的控制,采用可调节的装配夹具和预紧装置,提高轴的装配精度。
3.传动轴的平衡矫正通过对轴的平衡矫正,可以有效地降低轴的不平衡量。
具体而言,要进行轴的静平衡、动平衡测量,找出轴的不平衡量及其原因,采取合适的矫正方法进行调整。
平衡精度等级的合理选用与不平衡量的简化计算公式

平衡精度等级的合理选用与不平衡量的简化计算公式平衡精度等级是评估一个分类模型在不平衡数据集上的性能的一个指标。
不平衡数据集指的是在训练集中不同类别的样本数量差异很大。
在不平衡数据集上评估分类模型的性能是很重要的,因为在这种情况下,简单地比较分类准确率是不准确的,模型可能因为倾向于预测数量多的类别而被错误地认为是一个优秀的模型。
一个合理的选择是使用平衡精度等级(BAL)作为评估模型性能的指标。
平衡精度等级是通过调整模型的预测结果来平衡不同类别的重要性得到的。
它通过计算每个类别的精确度和召回率的均值来得到。
精确度是指模型正确预测为正样本的比例,召回率是指模型正确预测为正样本的样本占所有真实正样本的比例。
平衡精度等级考虑到了分类模型在不同类别上的表现,并对每个类别的性能进行了平衡。
平衡精度等级越高,说明模型在不平衡数据集上的性能越好。
计算平衡精度等级可以使用以下公式:BAL = 1/nc * ∑(Σ((TP/TP+FN) + (T N/TN+FP))/2)其中,nc是类别的数量,TP是真正样本数,FN是假负样本数,TN是真负样本数,FP是假正样本数。
在计算平衡精度等级时,我们需要计算每个类别的精确度和召回率。
精确度的计算公式为:Precision = TP/TP+FP召回率的计算公式为:Recall = TP/TP+FN不平衡数据集中往往存在一个类别的样本数量明显多余其他类别,因此计算平衡精度等级时,需要将样本数量较多的类别给予更大的权重,以平衡其他类别的重要性。
另外,为了简化计算公式,可以使用"F1-score"作为评估模型性能的指标。
F1-score是精确度和召回率的调和均值,可以通过以下公式计算:F1-score = 2 * (Precision * Recall) / (Precision + Recall)F1-score越高,说明模型在不平衡数据集上的性能越好。
F1-score综合了精确度和召回率,更加全面地评估了模型在不同类别上的表现。
平衡精度等级及允许剩余不平衡量计算

平衡精度等级及允许剩余不平衡量计算平衡精度等级(Balance Accuracy Level,简称BAL)是对于平衡性能的一种评估指标。
在工程设计和制造过程中,平衡是一个重要的技术要求,特别是对于旋转设备来说,如发动机、风力发电机组、离心泵等。
平衡的目的是通过调整旋转设备的质量分布,减小振动和噪声,提高设备的工作效率和寿命。
平衡精度等级是指在规定的工作状态下,设备的平衡质量与设备总质量之比。
它可以用来评估设备的平衡性能,控制设备的振动和噪声水平。
常用的平衡精度等级包括G1、G2.5、G6.3、G16、G40等,其中G1表示平衡质量约等于设备总质量的1%,G2.5表示平衡质量约等于设备总质量的2.5%,以此类推。
在平衡过程中,剩余不平衡量是一个重要的参数。
剩余不平衡量是指在进行平衡调整后,设备上剩余的不平衡质量。
剩余不平衡量越小,设备的平衡性能越好。
剩余不平衡量的计算可以通过测量设备上的振动信号或者使用平衡仪等设备进行。
剩余不平衡量的计算方法有很多种,其中一种常用的方法是使用动态平衡仪进行测量。
动态平衡仪可以测量设备在旋转状态下的振动信号,并根据测量结果计算出剩余不平衡量。
具体的计算方法如下:1.首先,测量设备在旋转状态下的振动信号,并记录下来。
2.将振动信号进行分析,通过频谱分析等方法提取出设备的主要振动模态。
3.根据主要振动模态的特征参数,计算设备的剩余不平衡量。
4.验证计算结果,如果剩余不平衡量超出设定范围,则需要进行进一步的平衡调整。
除了使用动态平衡仪进行测量,还可以使用传感器等设备进行剩余不平衡量的计算。
例如,可以在设备上安装加速度传感器,通过测量设备的加速度信号来计算剩余不平衡量。
不同的计算方法适用于不同的设备和测量要求,需要根据实际情况选择合适的方法。
总之,平衡精度等级和剩余不平衡量是评估设备平衡性能的重要指标。
通过合适的测量和计算方法,可以对设备的平衡性能进行评估和调整,提高设备的工作效率和寿命。
平衡精度等级及计算公式

平衡精度等级及计算公式 This model paper was revised by the Standardization Office on December 10, 2020
平衡精度等级
考虑到技术的先进性和经济上的合理性,国际标准化组织(ISO)于1940年制定了世界公认的ISO1940平衡等级,它将转子平衡等级分为11个级别,每个级别间以倍为增量,从要求最高的到要求最低的G4000。
单位为mm/s。
如下表所示:
在您选择平衡机之前,应该先确定转子的平衡等级。
允许不平衡量的计算
允许不平衡量的计算公式为:
*r e=G*1000/ωω=2πn/60 M*e=m
per
为允许不平衡量
式中m
per
M代表转子的自身重量,单位是kg;
G代表转子的平衡精度等级,单位是mm/s;
ω代表转子的角速度,单位是弧度/秒;
r 代表转子的校正半径,单位是mm;
n 代表转子的工作转速,单位是rpm;
e 代表转子的偏心距,单位是μm。
举例如下:
如一个电机转子的平衡精度要求为级,转子的重量为0.2kg,转子的工作转速为1000rpm,校正半径20mm,
则该转子的允许不平衡量为:
因电机转子一般都是双面校正平衡,故分配到每面的允许不平衡量为0.3g。
在选择平衡机之前,应先考虑转子所要求的平衡精度。
平衡精度等级及计算公式
平衡精度等级及计算公式
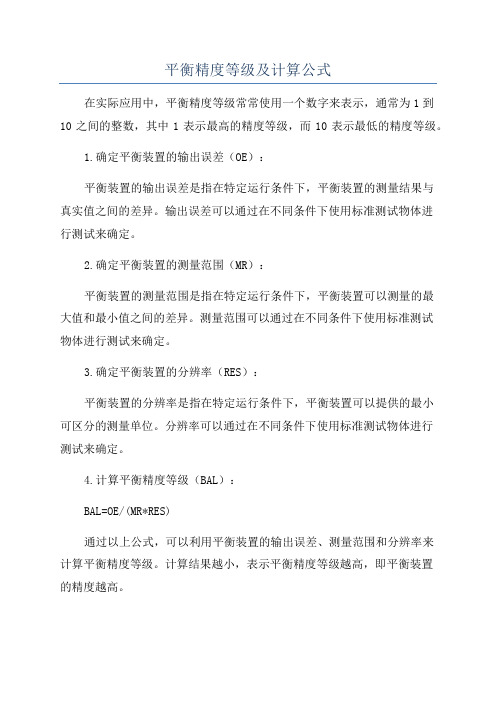
在实际应用中,平衡精度等级常常使用一个数字来表示,通常为1到10之间的整数,其中1表示最高的精度等级,而10表示最低的精度等级。
1.确定平衡装置的输出误差(OE):
平衡装置的输出误差是指在特定运行条件下,平衡装置的测量结果与
真实值之间的差异。
输出误差可以通过在不同条件下使用标准测试物体进
行测试来确定。
2.确定平衡装置的测量范围(MR):
平衡装置的测量范围是指在特定运行条件下,平衡装置可以测量的最
大值和最小值之间的差异。
测量范围可以通过在不同条件下使用标准测试
物体进行测试来确定。
3.确定平衡装置的分辨率(RES):
平衡装置的分辨率是指在特定运行条件下,平衡装置可以提供的最小
可区分的测量单位。
分辨率可以通过在不同条件下使用标准测试物体进行
测试来确定。
4.计算平衡精度等级(BAL):
BAL=OE/(MR*RES)
通过以上公式,可以利用平衡装置的输出误差、测量范围和分辨率来
计算平衡精度等级。
计算结果越小,表示平衡精度等级越高,即平衡装置
的精度越高。
需要注意的是,计算平衡精度等级时,输出误差、测量范围和分辨率应该使用相同的单位,以确保计算结果的准确性。
另外,上述公式只适用于一般情况下的平衡装置,对于特殊的平衡装置,可能需要根据具体情况进行相应的调整。
动平衡精度等级标准

动平衡精度等级标准动平衡精度是指在动力机械转子旋转时,转子的质量分布和转子轴线的几何形状的精度。
动平衡精度的高低直接影响到机械设备的运行效率、安全性和使用寿命。
因此,动平衡精度等级标准是对动平衡精度进行评定和分类的重要依据,下面将介绍动平衡精度等级标准的相关内容。
一、动平衡精度等级标准的分类。
根据国际标准ISO1940《机械旋转体平衡质量要求》,动平衡精度等级被分为G等级、F等级和S等级三个等级。
其中G等级是最低的精度要求,S等级是最高的精度要求。
不同等级的动平衡精度要求适用于不同类型的机械设备,具体如下:1. G等级,适用于一般的机械设备,如风机、水泵等。
G等级的动平衡精度要求相对较低,适用于对转子平衡精度要求不高的设备。
2. F等级,适用于对平衡精度要求较高的机械设备,如离心压缩机、离心泵等。
F等级的动平衡精度要求比G等级要高,适用于对转子平衡精度要求较高的设备。
3. S等级,适用于对平衡精度要求非常高的机械设备,如高速离心机、航空发动机等。
S等级的动平衡精度要求是最高的,适用于对转子平衡精度要求非常高的设备。
二、动平衡精度等级标准的评定方法。
动平衡精度等级的评定主要依据转子的质量不平衡量和不平衡力矩。
质量不平衡量是指转子在旋转时由于质量分布不均匀而产生的不平衡现象,通常用来评定G 等级和F等级的动平衡精度;而不平衡力矩是指转子在旋转时由于几何形状不对称而产生的不平衡现象,通常用来评定S等级的动平衡精度。
评定动平衡精度等级的方法一般包括静平衡试验和动平衡试验。
静平衡试验是在静止状态下测量转子的不平衡量,用来评定质量不平衡量;而动平衡试验是在旋转状态下测量转子的不平衡力矩,用来评定不平衡力矩。
通过这些试验数据,可以对转子的动平衡精度等级进行准确评定。
三、动平衡精度等级标准的重要性。
动平衡精度等级标准的制定和执行对于保障机械设备的安全运行和提高设备的使用寿命具有重要意义。
合理的动平衡精度等级标准可以保证机械设备在运行时不产生过大的振动和噪音,减少设备的磨损和故障率,提高设备的运行效率和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L 1
第三章 不平衡量公差
Uper
2
U
per
*
Uper* U1 = U2 = 2
例如:Uper =200 gmm, L=600 mm,b=800 mm, 求:U1, U2
L b 13
Balancing and Diagnostic Systems
不平衡量的公差
校正面的分配
第Hale Waihona Puke 章 不平衡量公差• 根据轴承允许的受力情况决定平衡等级
2
动平衡的精度等级
平衡等级 G 4000 G 1600 G 630 G 250 G 100 G 40 G 16 G 6.3 G 2.5 G1 转子类型举例 低速柴油机的刚性曲轴和驱动轴 大型二冲程引擎的曲轴和驱动轴 四缸引擎的曲轴和驱动轴,挠性联接的船用柴油机的曲轴和驱动轴 刚性连接四冲程柴油机的引擎 高速六缸或六缸以上的柴油机的曲轴和驱动轴。轿车、卡车和机车的引擎
对称性转子,在转子长 度的三分之一的中间处 ,每个校正平面在外部 三等份,相对支承距离 L
Uper 1 = Uper 2 =
第三章 不平衡量公差
ISO 1940-1
1
2
Uper 2
L/3
L/3 L
L/3
9
不平衡量的公差
校正面的分配
Balancing and Diagnostic Systems
第三章 不平衡量公差
第三章 不平衡量公差
2. 重心相对轴承的位置;
3. 两个轴承负载情况是否相同? 4. 校正平面到重心的距离是否等距?
6
不平衡量的公差
校正面的分配
Balancing and Diagnostic Systems
第三章 不平衡量公差
对称性转子在2个平面靠 近支承平面处的可允许 剩余不平衡量 Uper 1 Uper 1 = Uper 2 = Uper 2
不对称转子,狭窄的校正面, 并在两支承平面间
第三章 不平衡量公差
ISO 1940-1
1
Uper
2
b/l < 0.3
可允许静不平衡量
Uper 3 =
Uper 2
L
b
2c Uper 2
可允许力偶不平衡量
c
3L 4b 3
L 14
Uper 1 = Uper 2 =
Balancing and Diagnostic Systems
3
16
Balancing and Diagnostic Systems
允许的平衡精度误差
精度等级 G 2.5和 G 1.6 G1 G0.4 制造商要求的剩余不平衡量 -10% -20% -25%
第三章 不平衡量公差
用户要求的剩余不平衡量 +15% +25% +35%
17
不平衡量的公差
校正面的分配
不对称转子,狭窄的校正 平面,校正平面不在两支 承平面之间(外悬)
第三章 不平衡量公差
ISO 1940-1
1
Uper
2
可允许静不平衡量
b c
Uper 3
U per L = 2 2c
可允许力偶不平衡量
L
= Uper = 1 U per 2
Uper 3L 2 4b
15
3
Balancing and Diagnostic Systems
不对称转子,对于校正面 不对称可允许剩余不平衡 量
h2 = 0.7 U per b b
U
per
Uper 1
Uper 2
0.3 Uper = Uper1 = U per
0.3 Uper = U per2 = U per h1 = 0.7 U per h1 b L 10 h2
Balancing and Diagnostic Systems
Balancing and Diagnostic Systems
第三章 不平衡量公差
车轮、轮架、轮座、驱动轴。挠性连接的六缸或六缸以上的柴油机的曲轴和驱动轴 汽车、卡车、机车的曲轴和传动轴 特殊要求的驱动轴、滚压机部件、农用机械部件,汽车、卡车、机车的引擎部件,特殊要求的六缸四 冲程引擎的曲轴和驱动轴 罐装机部件、船用涡轮传动件、离心机、造纸机的滚轮,打印机的滚轮、风扇、飞机涡轮机的转子、 飞轮、泵的叶轮、机床和一般机器的零件,有特殊要求的发动机的单个零件 燃气轮机、气轮机包括船用、轮机、刚性涡轮发电机转子、转子、压缩机、机床驱动部件、有特殊要 求的中型和大型电机转子、小型电机转子、涡轮泵 盒式录音机、留声机的驱动轴、磨床的驱动轴、特殊要求的小电机
Uper
ISO 1940-1
Uper 2
1
2
7
Balancing and Diagnostic Systems
不平衡量的公差
练习
实例 转子类型 转子质量 校正半径 工作转速 电枢转子 m = 100 kg r 1 =r 2 = 100 mm n = 3000 1/min
第三章 不平衡量公差
ISO 1940-1
Balancing and Diagnostic Systems
第三章 不平衡量公差
Uper 静平衡
1
Uper
ISO 1940-1 chapter
3.3 6.3 7.2
Uper 1 =
Uper
1 5
不平衡量公差 两个校正平面的转子 考虑的四个参数: 1. 校正平面与轴承之间的距离;
Balancing and Diagnostic Systems
第三章 不平衡量公差
动平衡的精度等级
校正平面的分配 允许的平衡精度误差
Balancing and Diagnostic Systems
第三章 不平衡量公差
1
Balancing and Diagnostic Systems
动平衡的精度等级
G =e * ω /1000 per 定义: e * ω 是转子偏心的切向速度 转子平衡等级的确定: • 根据积累的经验决定平衡的精度等级 • 根据试验结果决定平衡等级
G 0.4
精密磨床心轴、主轴、陀螺仪
3
Balancing and Diagnostic Systems
balance quality
第三章 不平衡量公差
旋转的最大工作转速 r / min rpm转速,每分钟几转 r/s
Rps,每秒钟几转,也可以用赫兹
4
不平衡量公差
校正面的分配
对称转子在平面1上可允许剩余不平衡量
r1
r2
平衡精度 可允许的偏心距(总)
可允许剩余不平衡量(总)
G=6.3 e=
Uper = Uper 1 Uper 2 uper 1 uper 2 = = = =
8
每个平面可允许剩余不平衡量
每个平面可允许不平衡质量
Balancing and Diagnostic Systems
不平衡量的公差
校正面的分配
不平衡量的公差
校正面的分配
可允许静不平衡量
第三章 不平衡量公差
1
Uper
2
Uper 3
Uper L = 2 2c
Uper 3 = Uper 0.19
b = 26
可允许力偶不平衡量
c = 115 L = 86
= Uper = 1 U per 2
Uper 3L 2 4b
= Uper 1.24 Uper = 1 U per 2
不平衡量的公差
在支承平面上不平衡量的效果
U1 U2 UA
第三章 不平衡量公差
UB
静不平衡量
UA,B = U 1,2
b L b L
U1
力偶不平衡量
b U A,B = U 1,2 L
b
L
UA
b
L
UB
U2
11
Balancing and Diagnostic Systems
不平衡量的公差
校正面的分配
不平衡量向量可以精确计算在所有平面(在刚性转子上) 不平衡量公差是指一个范围而不是向量。
第三章 不平衡量公差
不平衡量公差是可允许不平衡量的最大值。角度位置一般不考虑。
不平衡量的公差不能精确计算在任何平面,总要考虑最坏的情形。
12
Balancing and Diagnostic Systems
不平衡量的公差
校正面的分配
校正平面都在支承平面外面
对称转子在两个校正面上的可允许 剩余不平衡量,在两校正面间很宽 的距离