超声波清洗机PLC
汽车自动清洗PLC控制

PLC 课程设计汽车自动清洗装置 PLC 控制目录1 封面 (1)2 目录 (2)3.设计任务要求 (3)4.分析任务要求及解决方案 (3)4.1.分析任务 (3)4.2.解决方案 (3)4.3.I/O 分析 (5)4.4.I/O 分配表 (5)5.PLC 控制接线图 (5)控制梯形图及语句表 (6)7.程序原理分析 (8) (8)参考文献 (9)3 设计任务要求3.1. 设计一台汽车自动清洗机,其工作步骤图如下:图3-14 分析任务要求及解决方案4.1. 分析任务当发出启动命令时,清洗机开始工作,清洗机接触器和水阀门都打开,汽车进入洗刷范围时,刷子接触器开启,进入刷洗程序。
当检测器检测到车子离开时,清洗机接触器、水阀门和刷子接触器全部关闭,住手刷洗,发出停机命令,结束刷洗。
4.2 .解决方案我们通过以上的分析可以知道,先由人来发出启动命令,自动开启清洗接触器和水阀门;传感器检测到车子进入清洗范围时,刷子接触器打开挨近汽车进行清洗;传感器检测到车子离开清洗范围时,刷子接触器住手刷洗;最后我们发出住手命令,清洗机接触器和水阀门住手和关闭。
由此,我们设计出自动洗车机的工作流程图如下:4.3. I/O 分析经过对控制过程和要求的详细分析,我明确了具体的控制任务是在启动命令下,汽车进入则可以进行自动刷洗,汽车离开则可以自动住手刷洗。
确定了要完成的动作后,再确定动作的顺序:有启动一个输入点和住手一个输入点。
按下启动按钮,启动清洗接触器和水阀门,接着传感器检测汽车是否进入清洗范围,进入则开始刷洗;汽车离开则住手刷洗,按下住手命令则清洗结束。
4.4 .I/O 分配表通过 I/O 分析后,我确定了本装置的 I/O 分配表,如下:名称启动按钮输出输入I0.0代号SB1信号图 3-35. PLC 控制接线图根据选择的 PLC 类型和装置的原理我确定装置接线图如下图 3-36 P LC 序功能图及梯形图的设计输入信号住手按钮 检测信号水阀门SB2ST Y VI0.1I0.2Q0.0 输出信号刷子接触器 清洗接触器启动运行提示住手运行提示刷洗前提示KM1KM2绿灯红灯黄灯Q0.1Q0.2Q0.3Q0.4Q0.56.1 根据 PLC 的控制路线图和 I/O 分配表,画出其功能图和梯形图:图3-46.2 根据 PLC 顺序功能图,我们用转换中心编写程序如下:图3-57. 程序原理分析启动 PLC,运行汽车自动汽车自动清洗程序后,绿灯 Q0.3 亮起来,表示程序已经准备好,等待启动清洗命令。
基于PLC的自动洗车控制系统设计

基于PLC的自动洗车控制系统设计摘要:本文旨在设计一款基于PLC的自动洗车控制系统,该系统使用传感器检测车辆的位置和状态,并根据检测结果自动启动水泵、喷水器、刷子等设备进行洗车。
本文详细介绍了该系统的硬件设计、软件设计和通信设计,并对系统的可行性进行了分析。
关键词:PLC;自动洗车控制系统;传感器;硬件设计;软件设计;通信设计Abstract:The purpose of this paper is to design an automatic car washing control system based on PLC. The system uses sensorsto detect the position and status of the vehicle, and automatically starts water pumps, sprayers, brushes and other equipment for washing according to the detection results.This paper introduces the hardware design, software designand communication design of the system in detail, andanalyzes the feasibility of the system.Keywords:PLC; automatic car washing control system; sensor; hardware design; software design; communication design1.引言随着汽车的普及和私家车的增多,人们对汽车的保养和清洗越来越注重。
但是传统的手动洗车方式需要人工参与,而且效率低下,难以满足人们的需求。
因此,自动洗车控制系统应运而生。
超声波清洗机发生器使用说明书
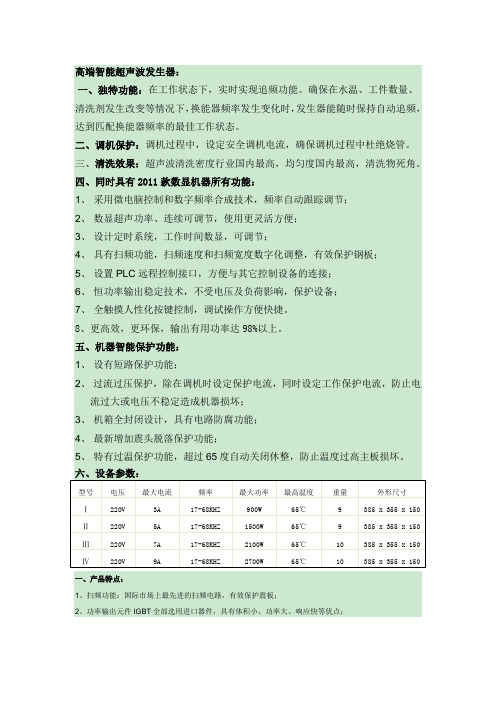
六、设备参数:
型号
电压
最大电流
频率
最大功率
最高温度
重量
外形尺寸
Ⅰ
220V
3A
17-68KHZ
900W
65℃
9
385 x 355 x 150
Ⅱ
220V
5A
17-68KHZ
1500W
65℃
9
385 x 355 x 150
ⅢHale Waihona Puke 220V7A17-68KHZ
高端智能超声波发生器:
一、独特功能:在工作状态下,实时实现追频功能。确保在水温、工件数量、清洗剂发生改变等情况下,换能器频率发生变化时,发生器能随时保持自动追频,达到匹配换能器频率的最佳工作状态。
二、调机保护:调机过程中,设定安全调机电流,确保调机过程中杜绝烧管。
三、清洗效果:超声波清洗密度行业国内最高,均匀度国内最高,清洗物死角。
四、同时具有2011款数显机器所有功能:
1、采用微电脑控制和数字频率合成技术,频率自动跟踪调节;
2、数显超声功率、连续可调节,使用更灵活方便;
3、设计定时系统,工作时间数显,可调节;
4、具有扫频功能,扫频速度和扫频宽度数字化调整,有效保护钢板;
5、设置PLC远程控制接口,方便与其它控制设备的连接;
6、恒功率输出稳定技术,不受电压及负荷影响,保护设备;
2100W
65℃
10
385 x 355 x 150
Ⅳ
220V
9A
17-68KHZ
2700W
65℃
10
385 x 355 x 150
一、产品特点:
超声波清洗机结构创新设计

超声波清洗机结构创新设计摘要:随着科学技术的进步,超声波清洗机的应用日益扩大,成为大众对于清洁方面的不二选择。
经研究表明,超声波在作用于液体时,超声波释放的每一个气泡的撕裂会产生极大能量的冲击波,几百度的高温剂上千个大气压,因此这种现象被称之为“空化作用”,超声波清洗正是用气泡的撕裂所产生的冲击波来达到清洗工件的作用。
然而市面上的超声波清洗机里的换能器大多采用粘胶。
本次结构设计中采用螺丝加粘胶防止换能器脱落的情况。
关键词:超声波;换能器;发生器引言目前,在人们的生活中,超声波清洗技术应用广泛,随着对超声波清洗技术研究的不断深入,超声波清洗的成本越来越低,而其带来的经济效益越来越高,因此超声波清洗深受大众喜爱。
“空化作用”和“直进流作用”是超声波清洗的两个重要作用,超声波清洗主要就是利用超声波在液体中的“空化作用”和“直进流作用”对清洗液和被清洗物上污渍直接和间接两方面的综合作用,使得污渍被剥离清洗物件的表面,达到快速清洗干净的目的。
针对上述情况背景本文设计一款超声波清洗机结构。
设计超声波清洗机结构主要有五个部分组成,包括超身波发生器、超声波换能器、箱体、附加部件及中央控制系统,结构简单,整体稳定效率高。
1超声波清洗机设计概述针对超声波清洗的行业本文设计了一种超声波清洗机的结构。
它主要有超身波发生器、超声波换能器、箱体、附加部件及中央控制系统组成;它具有设计简洁,使用方便的优点;还可以有效代替手动清洗可以保证工件表面不被破坏的情况下去除污渍,节省了人类劳动力降低成本。
2超声波清洗机整体结构设计据了解人工清洗工件零件方式有以下几种:第一种用毛刷、棉丝等工具直接对工零件表面的污物进行清洗;第二种就是用清洗液对工零件进行冲洗;第二种是用热油、热水、热风、蒸气对工件表面进行加热,使其溶解脱落;第四种用清洗剂对工件零件进行浸泡,其主要作用是使清洗机与工件表面污物脱离。
人工清洗的有很大缺点比如劳动条件差、效率低、清洗质量由操作者主观因素所影响。
「自动洗车机PLC程序设计」

「自动洗车机PLC程序设计」自动洗车机是一种现代化的设备,它通过机械装置和控制系统完成对车辆的清洗和护理。
在自动洗车机中,PLC(可编程逻辑控制器)是一个关键的部件,它负责控制和协调各个机械装置的运行,以实现各种清洗和护理功能。
PLC程序设计是自动洗车机工程师的重要任务之一、一个高效稳定的PLC程序可以确保自动洗车机的正常运行,提高清洗效率和质量。
下面将详细介绍自动洗车机PLC程序设计的几个重要方面。
首先,需要确定自动洗车机的功能需求。
根据洗车机的类型和规模,确定洗车过程中所需的基本功能和附加功能,比如清洗、漂洗、抛光、吹干等。
然后,根据这些功能需求来设计PLC程序的基本框架。
其次,需要采集和处理洗车机的各种传感器和控制器的信号。
例如,通过水位传感器判断清洗槽的水位是否达到要求,通过温度传感器监测清洗水的温度、通过红外传感器检测车辆的位置等。
将这些传感器和控制器连接到PLC的输入端口,并编写相应的程序来处理这些信号,并根据信号的状态来控制各个机械装置的运行。
第三,需要为洗车机的各个动作编写相应的程序。
例如,清洗槽的水泵的启停控制程序,喷水枪的开关控制程序、擦洗刷的运行程序等。
这些程序需要根据洗车机的具体机械结构和操作要求来设计,并且需要确保各个动作的协调和连贯性,以提高洗车效果和效率。
第四,在编写PLC程序时,需要考虑安全性和可靠性。
对于自动洗车机来说,安全是一个非常重要的因素。
因此,需要编写相应的安全保护程序,比如急停按钮的功能、紧急状况下的自动停止程序等。
此外,还需要对PLC程序进行测试和调试,以确保程序的正确性和稳定性。
最后,PLC程序设计需要考虑洗车机的扩展和升级。
随着科技的不断发展和用户需求的增加,洗车机的功能和性能也会不断提升。
因此,在PLC程序设计时需要留出余量和扩展接口,以方便将来的升级和改进。
总之,自动洗车机PLC程序设计是一项复杂而又重要的工作。
它需要综合考虑洗车机的功能需求、传感器和控制器的信号处理、动作控制程序的设计、安全性和可靠性等多个方面。
超声波清洗机控制系统设计
设计任务书1.设计题目:超声波清洗机控制系统设计2.设计内容:1)完成《设计指导书》所要求的控制循环2)按停止按钮,完成当前循环后再停3)要求可以实现手动、单周期、连续控制4)循环5次,停止循环,声光间断报警5秒3.设计要求:1)画出端子分配图和顺序功能图2)设计并调试PLC控制梯形图3)设计说明书4. 进度安排:1) 理解题目要求,查阅资料,确定设计方案 2天2) PLC顺序功能图和梯形图设计 5天3)说明书撰写 2天4)答辩 1天指导教师:主管院长:年月日目录1. 前言 (3)2. 课程设计题目 (4)3. 总体设计 (5)3.1 PLC选型 (5)3.2 地址分配表 (5)4. PLC程序设计 (6)4.1 设计思想 (6)4.2 PLC顺序功能图 (7)4.3 PLC梯形图 (8)4.4 PLC指令表 (13)5. 总结 (15)6. 参考文献 (16)前言PLC即可编程控制器(Programmable logic Controller,是指以计算机技术为基础的新型工业控制装置。
在1987年国际电工委员会(International Electrical Committee)颁布的PLC标准草案中对PLC做了如下定义:PLC英文全称Programmable Logic Controller ,中文全称为可编程逻辑控制器,定义是:一种数字运算操作的电子系统,专为在工业环境应用而设计的。
它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算,顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程.PLC是可编程逻辑电路,也是一种和硬件结合很紧密的语言,在半导体方面有很重要的应用,可以说有半导体的地方就有PLC “PLC是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。
它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。
超声波清洗机技术要求
超声波清洗机技术要求一、一般技术条件1、适用范围该设备用于XXXXX部件进行超声波清洗,并具有对清洗液自动加热功能2、设备信号、规格及数量3、环境条件海拔高度:不超过1000m环境温度:﹣15~40℃相对湿度:日平均值不大于95%,月平均值不大于90%,有凝露情况发生4、电源参数输入电源为:三相四线制AC380V±10%,50HZ二、主要技术参数超声槽:超声波频率20KHz超声波功率 1.5Kw电加热器功率2Kw清洗水温30~40℃振子数量100W×20高压水压力≮8bar漂洗水温常温三、其他要求1、超声波清洗机主要由不锈钢清洗槽、超声波系统(换能器、震子)、上下料输送系统、加热系统、高压水泵喷淋系统、电控系统(包括PLC程序控制)、水箱。
2、清洗槽采用不锈钢制造,高压水泵站装在清洗槽的下部。
清洗后的污水和污物通过排水阀排入污水处理站。
水循环系统有清洗和漂洗两个独立回路。
每个回路分别有水箱、水泵、滤网、管道和阀门等。
水箱是清洗机的基础,全部机件安装在水箱上,形成一体化的结构。
3、提供自动控制和手动控制功能。
4、此设备需要安装液位控制仪和温度自控系统。
5、清洗方式采用超声波清洗和漩流复合式清洗,清洗液采用水基清洗液。
6、清洗流程:将被清洗件放在提篮内,然后置于清洗池内,进行封闭式自动清洗,首先进行的是超声波清洗,然后自动转到漩流冲洗,最后是漂洗。
7、清洗过程采用PLC进行控制,要求各工艺清洗时间可由操作人员进行调整。
并且要求PLC控制部件采用进口名牌产品。
8、超声槽需设置液位报警装置,并且要有自动补液功能。
9、此清洗设备要满足XXX设备清洗的要求。
10、操作人员的安全保护供货商应提供对于设备操作人员的安全保护要求,并提供安全保护措施。
11、环境保护的要求(1)设备产生的废液、废渣,应处理后排放。
(2)噪声水平应符合环保条例要求,振动小。
12、设备使用寿命不小于15年。
四、总体要求1、操作人员的安全保护供货商应提供对于设备操作人员的安全保护要求,并提供安全保护措施。
全自动超声波清洗机机械臂PLC控制系统
() 2 用编程器调出程序,仔细分析控 制软件和机械
系统 ,确 定该 设备 存在 一 定 的设 计 缺陷 :① 原 左 右方 向 位置 识 别器件 全 部用 两线 式 接 近开 关 ; 因其有 漏 电电流 的 影 响可 能 造成 假 输入 现象 。② 设 备 使 用 一段 时期 后 ,
图 1 能 耗 制 动 原 理 图
臂定位系统 左右方 向越 位偏差增大现象, 即到达接 近 开关位置后 并没有立 即停 止,有 时使产品篮子放不 到
槽 子 上 的 V形 定 位 口上 , 有 时 机 械 手 在 应 该 上 升 却 没 有 上 升 时就 左右 移 动 ,致 使 机 械 手 撞 在 内槽 壁 上 ; 而 且 曾发 生 过 因定 位 错 误 使 产 品篮 子 顶 在 槽 体 上 而 导 致 机 械 臂组 件整 体 歪斜 ,所 幸 发 现及 时 , 才未 扩 大 事故 。 这 种 位置 运 动 控 制 要 求 机 械 臂 有 严 格 的 定 位 和 顺 序 ,
由于移动器、部件的磨合使摩擦阻力减小,左右 向运动 电机 失 电后 的惯性 移 动量 越 来越 大 ,控 制软 件 中没有 消
除这 个惯性 移 动量 的措施 。
收稿 日 : 0 6 1 — 0 期 2 0 — 11
33 控制程序软件的设计、修 改及 完善 .
对 位置 识 别器 件 反馈 的信 号 (r 集 电极 开路 输 出的 1L _
噩 ;髓 馐
PL 控 制 技 术 C
冲 编 码器 ( MR 、3 0 / 、D 5 2 V , 因其 靠转 轴 O ON 6 PR C -4 ) 齿 轮与 导轨 上 的齿 条啮 合运 动 , 齿条 的 平直 度也 是 造成 编 码器松 动 的 一个 原 因 。为此 用 一个 拉 簧 向右下 方 拉 住 固定编 码器 的基 板 ,从 而使 编 码器 转 轴 齿轮 在整 个 行程 中与齿 条 紧密 啮合 ,另 外对 编 码器 联 轴 顶丝 进行 加 固和 防松 动 处理 。达 到 了 良好 的防 止编 码 器松 动 而造 成 齿侧 径 向间 隙的效 果 。
超声波清洗机清洗的标准
精品文档,值得拥有
超声波清洗机清洗的标准
超声波清洗机的适用范围:
1、超声波清洗机用于电子间,设备应能对车辆上的电器、电子部件进行超声波清洗,并具有
2、对清洗液进行自动加热的功能。
超声波清洗机的环境条件:
3、海拔高度:不超过1000m
4、环境温度:-10℃~45℃
5、相对湿度:日平均值不大于95%,月平均值不大于90%,有凝露情况发生
超声波清洗机其它要求:
6、清洗方式采用超声波与漩流复合式清洗,清洗液采用水基清洗液。
7、清洗流程:将被清洗件放在提篮内,然后置于清洗池内,进行封闭式自动清洗。
首先进行的是超声波清洗,然后自动转到漩流冲洗,最后是漂洗。
8、清洗过程采用PLC进行控制,要求各工艺清洗时间可以由操作人员进行调整。
并且要求PLC控制部件采用进口名牌产品。
1 / 1。
三菱PLC在超声波气相清洗机中的应用
接 受或输 出触摸屏 内部 的各种监控信 号。
3系统 构成设计 根据 工艺分析和控制需求分析 ,选用如表 1 所 示的产 品
图 1 软件设计 图
软件 设计的关键难点在 于小车的运动状 态的循环 改变 ,
—
—
斟协论坛 ・2 0 1 3年第 1 0 期( 下 )——
向品闸管输出为 3 。
型号
2 4 VDC
数量
l
C P U模块
输 入 模 块
F Xl N . 6 0 MR . D Nhomakorabea F X2 N. 8 E X
l
1
输 出模块 触 摸屏
F X 2 N . 8 E Y R G O T 1 1 5 5 一 S WB Q - C
米 构成 超 声 波 气 相 清 洗 机控 制 系 统 , F X系 列 P L C吸 取 了整 体
及 选型作介绍 , 指 出编 程的重点和难 点。同时也设计到触摸屏 的编程软件 , 并简要概括触摸屏 的主要编程 内容。
关键 词: P L C 气相清洗机 中图分类号: T M5 7 1
1 三菱 P L C简介
三菱 P L C 由 一 些 基 本 元 和 扩 展 单 元 组 成 。 其 中 基本 式 和 模 块 式 P L C 的优 点 , 各 单 元 问 采 用 叠 式 连 接 ,即 P L C
单元为中央处理单元 ( C P u) , 存储器 , 输入/ 输 m( I / O ) 接 口, I . I = I 的基本单元 、 扩 展单冗和扩展模块深度及高度均相 同, 连接时
清洗『 T 二 位, 干 燥 时 间按 照 _ T 艺 要 求调 节 , 时 间范 3 0 . 9 O秒 , 完 成 伞 部 T 艺流 程 后 , T艺料筐送到“ : 料 口输 送 机 构 J : , 料筐 自
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PLC课程设计
—超声波清洗
机
学院:机电工程学院
专业:机械设计制造及自动化
班级:
学号:
姓名:
日期:
指导老师:
目录
第一章引言
设计内容.................................................................-?2?-
要求.......................................................................-?2?-
主程序控制原理.......................................................-?3?-
第二章超声波清洗机控制系统设计流程
超声波清洗机控制系统电气原理图..............................-?4?-超声波清洗机控制系统流程图....................................- 5?-超声波清洗机控制系统I/O地址分配..........................-?6?-超声波清洗机控制系统I/O接线图.............................-?7?-超声波清洗机控制系统状态表....................................-?8?-
超声波清洗机控制系统模型图....................................-?9?-
超声波清洗机控制系统梯形图...................................-?10?-
第三章调试过程............................................................-?18?-
结论与参考文献..............................................................-?18?-
第一章
设计内容
超声波清洗机控制系统设计
要求
1.按下启动按钮后,电源灯亮,可以选择手动或自动的操作方式。
2.按下自动按钮,挂篮向下移动,压缩机开始启动。
3.挂篮运动6s后到达清洗区,停止运动,压缩机继续工作,加热器开始启动。
4.加热器启动10分钟后,超声波发生器开始启动,压缩机与加热器继续工作。
5.超声波发生器启动20分钟后,超声波发生器停止工作,挂篮开始向上开始运动,压缩机与加热器继续工作。
6.挂篮运动2s后,挂篮停止运动,到达蒸汽区,压缩机与加热器继续工作。
7.在蒸汽区停留5分钟后,启动喷淋,加热器停止工作,压缩机继续工作。
8.喷淋5分钟后,停止喷淋,挂篮继续向上运动,压缩机继续工作。
9.挂篮运动2s后,挂篮停止运动,到达冷凝区,压缩机继续工作。
10.在冷凝区停留2分钟后,挂篮继续向上运动,压缩机继续工作。
11.挂篮运动2s后,挂篮停止运动,压缩机停止工作,结束指示灯亮。
整个清洗程序完成。
12.选择手动操作,单个按钮分别控制每台电机的启停。
13.盖开关受压才能启动。
在自动状态下,若打开盖子,则系统处于暂停状态,门一旦合上,才能继续工作。
14.若清洗机正在运行,发生故障时,可以自动停止,清洗机回到初
始状态。
15.若清洗机正在运行,其他因素需要停止运行,可以一键停止,清洗机回到初始状态。
主程序控制原理
按下电源开关,电源灯亮。
若选择自动运行,按下启动按钮,压缩机启动,同时挂篮向下运动到清洗区。
然后加热器启动,10分钟后超声波发生器启动,20分钟后超声波发生器关闭。
挂篮向上运动到蒸汽区,停留5分钟后启动喷淋。
喷淋5分钟后,关闭喷淋。
挂篮继续上升,在冷凝区停留2分钟后,继续上升到顶部,结束灯亮。
若选择手动运行,电源灯亮后,清洗过程不再自动运行,每一步状态均由人工手动完成,每一状态之间没有严格的顺序,由人为的干预而定。
程序运行时,一旦温度过高、液位过低或浊度过高,都会触发故障,使故障灯亮,清洗停止运行。
第二章
超声波清洗机控制系统电气原理图
主电路电器原理图
挂篮升降电气原理图
超声波清洗机控制系统流程图
超声波清洗机控制系统I/O地址分配
输入继电器功能输出继电器功能
超声波清洗机控制系统I/O接线图
超声波清洗机控制系统状态表
超声波清洗机控制系统模型图
超声波清洗机控制系统梯形图
第三章调试过程
本设计完成后,在老师指点时间下到实验室调试程序,由于电源结反,导致输出灯不亮,后在仔细检查下,找到问题并改正。
自动运行与手动运行分别调试及下载,来检测其中的问题。
正式运行后,又对程序进一步完善,加进了故障灯及检测
结论与参考文献
本设计超声波清洗经启动后能完成预期动作,但由于设计者的水平有限,有许多的问题需要改善,有很多需要改进的地方。
比如故障发生后,不能确定具体原因。
通过近一个月的课程设计,经过资料的收集、方案的选择比较和论证,到分析计算,再到电气原理图等的绘制以及课程设计撰写等各个环节,我对PLC设计有了一个深层次的理解,同时对PLC的理解更加深刻和准确。
【1】陈建明《电气控制与PLC应用》2012【2】李长军《西门子S7-200PLC应用实例解说》2011
【3】廖常
初《S7-200SMART PLC编程与应用》2015。