二阶系统时域分析
二阶系统的时域分析二阶系统的数学模型
二阶系统的时域分析二阶系统的数学模型二阶系统指的是系统的动态特性可以由一个二阶微分方程描述的系统。
在控制工程中,二阶系统的时域分析主要包括对系统阶跃响应、脉冲响应、频率响应等进行分析。
下面将详细介绍二阶系统的数学模型以及各种时域分析方法。
二阶系统可以由一个二阶微分方程进行描述。
一般而言,二阶系统的数学模型可以写成如下形式:\[a_2\frac{{d^2y(t)}}{{dt^2}} + a_1\frac{{dy(t)}}{{dt}} +a_0y(t) = b_2\frac{{d^2u(t)}}{{dt^2}} + b_1\frac{{du(t)}}{{dt}}+ b_0u(t)\]其中,y(t)为系统的输出,u(t)为系统的输入,a_0、a_1、a_2以及b_0、b_1、b_2分别为系统的系数。
这个方程也可以写成常用的形式:\[\frac{{d^2y(t)}}{{dt^2}} + 2ζω_n\frac{{dy(t)}}{{dt}} +ω_n^2y(t) = K_p\frac{{d^2u(t)}}{{dt^2}} +T_i\frac{{du(t)}}{{dt}} + K_cu(t)\]其中,ζ为阻尼比,ω_n为自然频率,K_p为比例增益,T_i为积分时间常数,K_c为控制器增益。
2.二阶系统的阶跃响应阶跃响应是指系统在接受一个单位阶跃信号作为输入时的响应。
通过对二阶系统的数学模型应用拉普拉斯变换,可以得到系统的传递函数。
对于一个传递函数为G(s)的系统,其阶跃响应可以通过下面的公式得到:\[y(t) = A(1 - e^{-ζω_nt}\cos(ω_d t + ϕ))\]其中,A为阶跃响应的幅度,ω_d为阻尼振荡角频率,ϕ为相位角。
3.二阶系统的脉冲响应脉冲响应是指系统在接受一个单位脉冲信号作为输入时的响应。
与阶跃响应类似,通过对二阶系统的数学模型进行拉普拉斯变换,可以得到系统的传递函数。
对于一个传递函数为G(s)的系统,其脉冲响应可以通过下面的公式得到:\[y(t) = \frac{{A(1 - e^{-ζω_nt}\cos(ω_d t + ϕ))}}{{\sqrt{1-ζ^2}}}\]其中,A为单位脉冲信号的幅度。
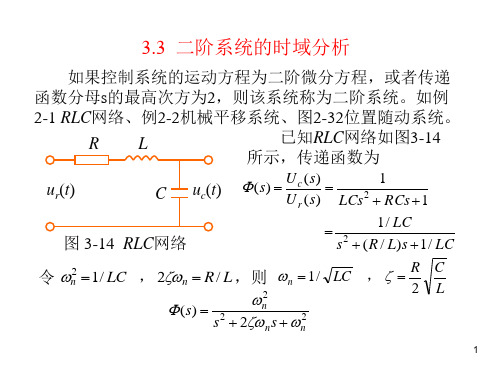
3.3 二阶系统的时域分析
=
由
e
ζω nts
1 1ζ
=
2
e
ζω nt
sin(ω d t + β ) ≤
e
ζω nt
1ζ 2
1ζ 2
得
ts =
1
ζω n
(ln
1
+ ln
1 1ζ
2
)
15
当0.4<ζ≤0.8时,可 以采用下面的近似公式 3.5 = 0.05 tS ≤
= 0.02 tS ≤
ts =
1
ζω n
(ln
1
+ ln
18
�
ωd
ζ一定,即β一定, ωn↑ → tr↓,响应速度越快; ωn一定, ζ ↓ → tr ↓ ,响应速度越慢.
12
h(t ) = 1
1 1ζ 2
e ζω nt sin(ω d t + β )
(t ≥ 0)
(2) 峰值时间tp 根据峰值时间的定义,在峰值处,h(t)的导数为零,故 ζω nt p ζω e ωd dh(t ) ζω t = n sin(ω d t + β ) e n p cos(ω d t + β ) = 0 dt t =t p 1ζ 2 1ζ 2
R C R 实际阻尼系数 ζ= = = 2 L Rc 临界阻尼系数
2
故ζ 称为相对阻尼系数或阻尼比.
一,二阶系统的数学模型
R(s)
2 ωn
C(s)
开环传递函数
2 ωn G(s) = s ( s + 2ζω n )
-
s( s + 2ζω n )
图 3-13 典型二阶系统结构图
闭环传递函数
第3讲 二阶系统的时域分析
18
三、典型二阶系统的动态过程分析
(一)衰减振荡瞬态过程 (0 1):欠阻尼
s 1, 2 ζω n jωn 1 ζ
2
ζω n jωd
c (t ) 1 Fra biblioteke ζωn t 1 ζ 2
sin(ωd t β ) ,
t 0
⒈ 上升时间 t r :根据定义,当 t t r时,c(tr ) 1 。
3
s1, 2 n n 1
2
⒊ 当 1 时,特征方程有一对相等的实根,两个极点位于S平 面负实轴上,系统时间响应无振荡,称为临界阻尼系统,系统 的阶跃响应为非振荡过程。 ⒋ 当 1 时,特征方程有一对不等的实根,两个极点位于S 平面负实轴上,系统时间响应无振荡,称为过阻尼系统,系统 的阶跃响应为非振荡过程。 以上 1 属于非振荡情况
于是有:
tr d
ωd ωn 1 ζ 2
n
n
j n 1 2 j d
n
称为阻尼角
j n 1 2
cos
可见,当阻尼比一定时,系统的响应速度与自然频率成正比; 而当阻尼振荡频率一定时,阻尼比越小,上升时间越短。
2 n 1 C ( s) ( s) R( s) 2 2 s 2 n s n s
2 其中, 由特征方程 s 2 2 n s n 0
可求得两个特征根(即闭环极点)
s1, 2 n n 2 1
6
[分析]:
s1, 2 n n 1
s n n 1 2 2 2 2 s s 2 n s n s 2 n s n
二阶系统时域分析

n1,0.1~0.9时的响应曲线。
0.1 0.2 0.3 0.4
0.8
n 一定时,随 的增大,系统的响应速度变慢,超调量 减小。
20
4) 1 (临界阻尼)
C (s) R (s) (s) 1 s(s n 2 n )2 1 s (s n n )2 s 1n
c (t ) 1 nentt e nt 求导可知,c(t)输出为一条单调上升的曲线。n 1,2,3时:
-1<ξ<0
振荡发散
12
❖
1时
(s)s2
n2 2nsn2
,取 n 1
,阶跃响应为:
ξ = -1
c(t)输出为一单调发散形式的曲线。
13
❖ 1
C (s ) R (s ) (s ) 1 ss 2 2n 2 n sn 2 a s s b p 1 s c p 2
p 1 ( 2 1 )n p 2 ( 2 1 )n
ent
sin(dt)
1ent[cos(dt)12sin(dt)]
ent 1 [
12
12cos(dt)sin(dt)]
s i 1n c eo 1s nt 2 c so ins (s dti n ) s i n ( a rcta) n 1 2
11
c(t)1
ent
12
sin(dt)
(1 0)
c(t)输出为一发散正弦振荡形式的曲线。
ξξ越= 大0.4,~0.8p越小,系p=统25的.4平%~稳1性.5%越。好
31
5)调整时间ts
c(t)1
ent
12
sind(t)
包络线 1 e nt
1 2
ents
1
1
自动控制理论时域分析2--二阶系统

4.调整时间 t s(又称过渡过程时间) :响应曲线达到并 保持与稳态值之差在预定的差值△内(又叫误差带 )所 需要的时间。一般△取±2%或±5%。
二、二阶系统的动态响应性能指标 (1)峰值时间 t P
因为
c (t ) 1 e nt 1
2
sin( d t )
t n p d
dc ( t ) dt
d p
0
ttp
e sin( t ) e cos( t ) 0
t n p n d p
整理得:
tg ( ) dtp
12
p t p 0, ,2 ,3
n
0 Re
s1
s2
0
Re
s2
s1
0
Re
0
Re
s2
(a) 0 1 (b) 1 (c) 1 (d) 0
特征根为:共扼复数 特征根为:
相等实数
不等实数
共扼虚数
1.欠阻尼情况 :
( 0 1 )
2
s n 1 1 , 2 n
s j 1 , 2 n d
c ( t) 1 cos t n
c (t )
( 0)
(t 0)
2
1
0
t
这是一条等幅振荡曲线。
( 0)
c (t )
1
c (t ) r (t )
2
1
1
c (t )
0
t
0
t
( 0 1 )
1
r (t )
第三章 控制系统的时域分析—2二阶系统时域分析
2 n
1
s
L1
A0 s
s
A1 s1
s
A2 s2
s2 s1
其 中A0 s C(s) s0 1A1 , A2自 己 求
8
c t
1
A1e s1t
A2e s2t
1
s2
1 s1
s1e s2t s2e s1t
❖单调过程,无超调, 大,内耗大,无法维持能量交换,即
二阶系统的时域响应
快
稳
准
动态性能分析 tr,td,tp,ts,s%
稳定性分析 稳态性能分析
Routh判据
ess
二阶系统的基本性质及结论
2
3-3 二阶系统的时域分析
二阶系统:以二阶微分方程作为运动方程的控制系统。 1 二阶系统的数学模型
一伺服系统,系统框图如下:
R(s) E(s)
K
C(s)
- sTms 1
振荡角频率”
10
(s)
s2
1 2 01s
1
2
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
2
4
6
8 10 12 14 16 18 20
11
❖临界阻尼下单位阶跃响应 1 1
r(t) 1(t) , R(s) 1 s
s1 s2 n
s1 s2
C(s) n2 1 1 n 1
K Tm
n-自然频率(或无阻尼振荡频率)
2
n
1 Tm
1
2 Tm K
-阻尼比(相对阻尼系数)
二阶系统的闭环特征方程为:
s2 2ns n2 0
自动控制理论时域分析2-二阶系统

案例二:二阶系统稳定性分析与改善
稳定性分析方法
介绍时域分析法中的劳斯判据、赫尔维茨判据等方法,用于判断二 阶系统的稳定性。
改善稳定性措施
探讨通过改变系统参数、引入附加环节等措施来改善二阶系统的稳 定性。
仿真验证
利用MATLAB/Simulink等仿真工具对改善前后的二阶系统进行建模 和仿真,验证改善措施的有效性。
CHAPTER
二阶线性常微分方程
二阶线性常微分方程的一般形式: $Tfrac{d^2y}{dt^2} + frac{dy}{dt} + Ky = F(t)$
方程的解由输入信号 $F(t)$ 和系统初 始条件共同决定
其中,$T$ 为时间常数,$K$ 为放大 系数,$F(t)$ 为输入信号
二阶系统的传递函数
二阶系统稳定性的判定方法
二阶系统的稳定性可以通 过判断其阻尼比和自然频 率来确定。
当阻尼比大于1时,系统是 过阻尼的,输出会缓慢地趋 近于零,系统是稳定的。
当阻尼比等于1时,系统是临 界阻尼的,输出会以最快的速 度趋近于零,系统也是稳定的 。
当阻尼比等于0时,系统是无 阻尼的,输出会呈现等幅振荡 的形式,系统是不稳定的。
谢谢
THANKS
二阶系统的基本概念
01
二阶系统是指具有两个独立状态变量的线性定常系统,其数学 模型可用二阶常微分方程描述。
02
二阶系统具有广泛的代表性,许多实际系统可简化为二阶系统
进行分析。
二阶系统的性能指标包括阻尼比、自然频率、峰值时间、超调
03
量等,这些指标对于评价系统性能具有重要意义。
02 二阶系统的数学模型
当阻尼比小于1时,系统是欠 阻尼的,输出会呈现振荡衰减 的趋势,系统仍然是稳定的。
二阶系统的时域分析
实验三 二阶系统的时域分析一、实验目的1、通过考察系统的过渡过程指标,研究二阶系统的特征参数—阻尼比和自然频率对系统特性的影响,以及系统特征根的位置与过渡过程的关系。
2、学习自己设计实验,安排适当的实验参数,达到以上实验目标。
二、实验内容根据传递函数2222)(nn ns s s G ωζωω++=的单位阶跃响应,求取过渡过程的质量指标。
按表1的形式整理实验数据,分析实验结果,完成实验报告。
此时,系统的特征根为j j s n n βαζωζω±=-±-=22,11。
1、令ζ=,取三种不同的n ω,观察根在根平面上的位置,求其过渡过程和它的质量指标,进行比较。
说明当ζ相同时,过渡过程的哪些指标是相同的00.20.40.60.811.21.4ωn 改变,ζ=0.5不变Tim e (sec)A m p l i t u d e2、固定n ω,取ζ=0、、 、、1,观察根在根平面上的位置,求其过渡过程和它的质量指标。
总结当ζ不同时,质量指标有哪些变化00.20.40.60.811.21.41.61.82Time (sec)A m p l i t u d e通过上面两图形与表格总结可以得出:n ω影响二阶系统过渡过程中的峰值时间,过渡时间(在ζ不变的情况下,峰值时间随n ω增大而减小,过渡时间随n ω的增大而减小)ζ影响几乎全部过渡过程指标,其中超调量,衰减比仅与ζ有关(超调量随着ζ的增大而减小,衰减比随着ζ的增大而增大;在n ω不变的情况下,峰值时间随ζ增大而增大,过渡时间随ζ的增大而减小。
)n ω,ζ对系统的稳态误差均没有影响,且均为0.3、选三组实部(α)为负值且相等的复根,观察根在根平面上的位置,求其过渡过程和它的质量指标,进行比较,说明不同虚部(β)对过渡过程和质量指标有哪些影响。
00.20.40.60.811.21.41.6α=2,β分别取2,6,10Time (sec)A m p l i t u d e通过上图和表格中的数据可以得不同虚部对系统过渡过程的影响:在实部不变的情况下随虚部绝对值的增加,超调量增加,衰减比减少,峰值时间减小,调节时间不变,上升时间减小,稳态误差始终为0.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.有一位置随动系统,其结构图如下图所示,其中K
= 4。
求该系统的:1)自然
k
振荡角频率;2)系统的阻尼比;3)超调量和调节时间;4)如果要求 <0.707 ,
值。
应怎样改变系统参数 K
k
2.已知受控对象的开环传递函数为
(1)单位反馈时,计算单位脉冲响应的输出。
(2)试采用速度反馈方法,使得系统的阻尼比ζ=05.,确定速度反馈系数τ的值,并计算性能改善后的动态性能。
解
(1)单位反馈时,闭环传递函数为
其单位脉冲响应为
响应曲线为等幅振荡的,所以该系统仅作单位反馈,不能实现调节作用。
(2)增加速度反馈如图所示。
闭环传递函数为
ζωτ=,所以
阻尼比ζ=05.,则有2
n
τ=⋅=
20.50.95
此时,系统阶跃响应的超调量为
调节时间为
3.已知速度反馈控制系统如图所示,要求系统的超调量为20%,峰值时间为1秒,试计算相应的前向增益K与速度反馈系数K 的值。
如果保持K值不变,Kf为零时,计算超调量增大值。
解上述系统的闭环传递函数为
比较二阶系统的标准式有
给定的性能指标为
上述指标与系统特征参数ζ和ωn的关系为:
解得
所以:
当K=125.,Kf=0时,也就是没有速度反馈时,闭环传递函数成为:
阻尼比:
超调量增大为:
4.对下图所示系统,试求K为何值时,阻尼比ζ=0.5。
并求此时系统单位阶跃响应的最大超调量和调整时间。
解:系统开环传函为:
系统闭环传函为:
最大超调量:
调整时间
5. 系统结构如图,欲使超调量бp =0. 2, 过渡过程时间t s =1秒(Δ=0.02),
试确定K 和τ的值。
答案:
()2222(2)2n n n K s s K s K s ωτζωωΦ==+++++ 0.456ζ= 8.77
n ω= 277n K ω== 0.078τ=
6. 题图所示机械系统,当受到 F =40N 力的作用时,位移量xt ()的阶跃响应如图所示,试确定机械系统的参数m ,k, f 的值。
解: 图示机械系统的传递函数为
由图所示稳态值()1c ∞=,由终值定理
得到 K=40N/m
由超调量: 峰值时间:
解出
所以
解出
7. 已知某控制系统如题图所示,内环为正反馈,反馈系数为Ks ,Ks>0,是不稳定的,在反馈的基础上增加前向通路比例-微分控制时,系统可以稳定,试确定
(1)系统稳定时,P -D 控制器参数Kc,Tc,的取值条件;
(2)当正反馈系数Ks =08.时,要求系统阶跃响应的超调量Mp =163%.和过渡时间
ts =08.秒,试确定 P -D 控制器参数 Kc,Tc,的取值。
解: (1)闭环传递函数为
2(1)()()
c c c c c c s K T s G s s K T s K K +=++-
闭环特征方程为
2()0c c c s s K T s K K ++-=
如果系统稳定,应有 0c c c
s K T K K >⎧⎨>⎩ (2)Ks =08.时,闭环传递函数为 2(1)()(0.8)
c c c c c c K T s G s s K T s K +=++- 由Mp =163%.和ts =08.秒,计算出 0.510n
ζω=⎧⎨=⎩ 由于2222101000n n
s s s s ζωω++=++= 比较系数 c K T 100.8100
c c K =⎧⎨-=⎩ 解出: c K 100.80.099c T =⎧⎨=⎩ 系统的闭环传递函数为 210100.8()10100
c s G s s s +=
++。