《自》第二章自动上料装置中的各种机构
自动机与自动线-第二章

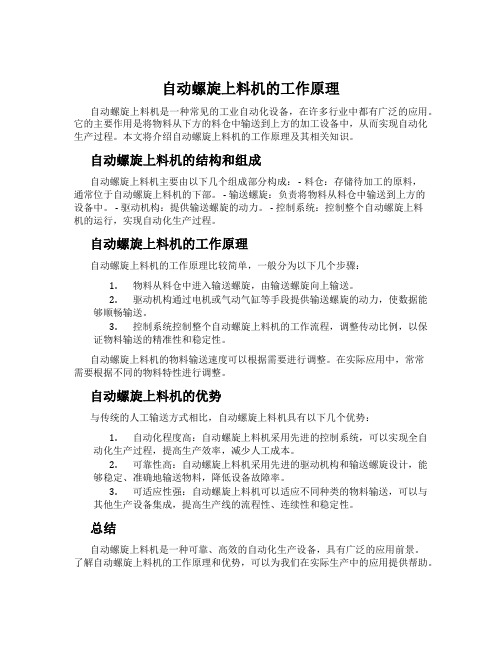
(5)侧向吸出式供送装置
图2-20 侧向吸出式烟包封签供送装置 l-封签存槽 2-压砣 3-摆动吸嘴 4-输送辊 5-真空转鼓 6-上胶凸轮 7-刮胶板 8-胶水槽 9-折纸板 10-翻包叶轮
11-固定导向板 12-缓冲杆 13-摆动折角爪
2.2.4 胶粘取料式
机构是通过对工件或对纸张涂胶, 在工件和纸张相接触时,靠胶水 的粘力,从纸库中取走面上的一 张纸。
(1) 橡皮吸头供料装置
图2-16 橡皮吸头供料装置 1-片料 2-料仓 3-橡皮吸头 4-支架 5-过桥滚轮
(2) 真空吸送装置
图2-17 纸页片真空吸送装置 1-纸页库 2-纸页叠 3-真空吸嘴 4、5、8、9-引纸辊
6-摆杆 7-引纸导板 10-侧压辊 11-调压螺旋
(3)上部吸出式大型纸片供送装置
图2-18 上部吸出式大型纸片供送装置 1-升降托板 2-微动开关 3-空气喷嘴 4-输送辊 5-真空转鼓 6-限位滚筒
7-重砣 8-偏心轮
(4)下部吸出式供送装置
图2-19 下部吸出式马口铁片供送装置 1-空气喷嘴 2-料库支承卡头 3-输送辊 4-吸盘 5-导柱 6-吸盘安装板
7-滑槽 8-滚轮 9-凸轮 10-凸轮摇杆机构 11-水平滑块
❖ 在轻工业生产中,主要有如下四种板片料的供料机 构。
2.2.1 摩擦滚轮式供料装置
❖ 原理 利用滚轮与板片(大多用在供纸上)之间的摩擦力大 于板片之间的摩擦力,从而把与滚轮接触的单张板 片料从储料库中分离出来。
❖ 用途 主要用于小型块状产品的裹包机和贴标机上。
摩擦滚轮式供料装置工作原理
图2-14 摩擦滚轮式供纸装置 1-压纸调节螺钉 2、4-输送辊
2.1.1 卷料的支承和张紧装置
套类零件自动上下料机构设计

目录1. 绪论 01.1 自动上下料机构概述 01.2 自动上下料的组成分类及特点 01.3 自动上下料机构设计的意义 (2)2.总体方案设计 (4)2.1 机械手的基本形式的选择 (4)2.2 自动上下料机构方案的拟定 (5)2.3 CK6150型数控车床的主要参数 (7)2.4 驱动方式的确定 (9)2.5 机械手的技术参数列表 (11)3.机械手机械结构设计 (12)3.1 手部的设计 (12)3.1.1手部的概述 (12)3.1.2 机械手部的典型结构 (13)3.1.3 机械式手爪设计 (14)3.1.4 手部驱动力计算 (14)3.2.1 臂部设计的基本要求 (18)3.2.2 手臂的常用机构 (19)3.3 机身设计 (24)3.3.1 概述 (24)3.3.2 俯仰与回转机身的设计 (24)4.机械手的运动分析 (32)4.1机械手的运动规划 (32)4.2 机械手的主要部件和运动 (32)4.2.1 机械手的手爪的运动 (33)4.2.2 机械手的臂部的运动 (33)4.3 机械手的整体运动分析 (34)5.气动控制系统设计 (36)5.1 气压传动系统原理图的拟定 (36)5.1.2气压传动系统原理图的拟定 (36)5.2 机械手的PLC控制设计(本设计中选用S7—200PLC) (38)5.2.1 机械手自动上下料过程 (38)5.2.2 机械手的PLC控制设计 (38)图5.3 梯形图 (42)结论与展望 (43)参考文献 (44)指导教师简介 (45)1. 绪论1.1 自动上下料机构概述在自动化加工,装配生产线中,能自动完成将工件向加工或装配机械供给并上下料的装置,称为自动上下料装置。
自动上下料装置就是为实现将毛坯自动选入加工位置,准确的定位,夹紧以及取下加工完的零件所必须的许多功能机构的总和。
统计表明,在工件的加工装配过程中,工件的供给,上料,下料及搬运等工序所需费用约占全部费用的三分之一,所费工时约占全部工时的三分之二以上,而且绝大多数的事故都发生在这些工序中。
自动螺旋上料机的工作原理
自动螺旋上料机的工作原理自动螺旋上料机是一种常见的工业自动化设备,在许多行业中都有广泛的应用。
它的主要作用是将物料从下方的料仓中输送到上方的加工设备中,从而实现自动化生产过程。
本文将介绍自动螺旋上料机的工作原理及其相关知识。
自动螺旋上料机的结构和组成自动螺旋上料机主要由以下几个组成部分构成: - 料仓:存储待加工的原料,通常位于自动螺旋上料机的下部。
- 输送螺旋:负责将物料从料仓中输送到上方的设备中。
- 驱动机构:提供输送螺旋的动力。
- 控制系统:控制整个自动螺旋上料机的运行,实现自动化生产过程。
自动螺旋上料机的工作原理自动螺旋上料机的工作原理比较简单,一般分为以下几个步骤:1.物料从料仓中进入输送螺旋,由输送螺旋向上输送。
2.驱动机构通过电机或气动气缸等手段提供输送螺旋的动力,使数据能够顺畅输送。
3.控制系统控制整个自动螺旋上料机的工作流程,调整传动比例,以保证物料输送的精准性和稳定性。
自动螺旋上料机的物料输送速度可以根据需要进行调整。
在实际应用中,常常需要根据不同的物料特性进行调整。
自动螺旋上料机的优势与传统的人工输送方式相比,自动螺旋上料机具有以下几个优势:1.自动化程度高:自动螺旋上料机采用先进的控制系统,可以实现全自动化生产过程,提高生产效率,减少人工成本。
2.可靠性高:自动螺旋上料机采用先进的驱动机构和输送螺旋设计,能够稳定、准确地输送物料,降低设备故障率。
3.可适应性强:自动螺旋上料机可以适应不同种类的物料输送,可以与其他生产设备集成,提高生产线的流程性、连续性和稳定性。
总结自动螺旋上料机是一种可靠、高效的自动化生产设备,具有广泛的应用前景。
了解自动螺旋上料机的工作原理和优势,可以为我们在实际生产中的应用提供帮助。
自动化上下料装置

料仓 输料器 隔料器 上料机构 卸料机构
滑道式输送
V形输料槽 管形输料槽 轨道式输料槽
滑动输送时,为了克服摩擦阻力,保证可靠输送,应有较大的倾斜角, 一般不小于25°。如结构不允许,可采用辊道式输送。
05.06.2020
a
16
料仓式上料装置
上料机构
将从料仓或料斗经输料槽输送来的工 件送到机床预定的位置。
料的装置
特点 工件靠人工定向排列,然后靠机构自动 工件成批地倒入料斗,从定向排列到
送装到夹具
送装至夹具地点全部自动完成
实用 范围
用于产量大,但因重量、尺寸及几何形 形状简单、重量不大、批量很大、生
状特点难于自动定向排列的工件
产率很高、工序时间很短的工件
曲轴、连杆或单件工序时间长工件 紧固件、轴承、仪表、五金等
直线往复式
送料器 摆动往复式
回转式
连续式
料仓 输料器 隔料器 上料机构 卸料机构
05.06.2020
a
23
料仓
料仓式上料装置
输料器 隔料器
隔料器
控制从输料槽进入送料器的工件数量。
上料机构
在比较简单的上料装置中,其作用由送料器完成。 卸料机构
几种形式
利用直线往复式送料器的表面进行隔料 气缸和弹簧传动的隔料器 机械传动的销式隔料器 旋转运动的隔料器
05.06.202料仓式上料装置
输料器 隔料器
隔料器
控制从输料槽进入送料器的工件数量。
上料机构
在比较简单的上料装置中,其作用由送料器完成。 卸料机构
几种形式
利用直线往复式送料器的表面进行隔料 气缸和弹簧传动的隔料器 机械传动的销式隔料器 旋转运动的隔料器
第2章 上料自动化2

2020/8/4
武汉理工大学机电学院
20/27
钩的圆周速度还应保证钩子来得及从料堆中钩住坯件, 即应满足:
l V t
式中,t ——坯件滚入钩子运动区域所需时间。
2020/8/4
武汉理工大学机电学院
21/27
缺口圆盘式定向机构
2020/8/4
武汉理工大学机电学院
2020/8/4
武汉理工大学机电学院
33/54
滑道上工件受力分析
工件在轨道上的受力:
重力
惯性力
轨道反力 摩擦力 惯性力
摩擦力、惯性力
重力
与电磁铁的电流 I 有
关。
轨道反力 摩擦力
2020/8/4
武汉理工大学机电学院
34/54
(1)I=0 (即断电时),支承弹簧复位,滑道以加速度a1向右上方运动,工件力平衡 如图。
2020/8/4
武汉理工大学机电学院
15/27
2020/8/4
武汉理工大学机电学院
16/27
2020/8/4
武汉理工大学机电学院
17/27
管式定向机构
2020/8/4
武汉理工大学机电学院
18/27
钩式定向机构
作用原理
利用运动着的定向机构抓起工件的某些表面——孔、凹 槽等,使之从成堆的杂乱工件中分离出来并定向排列。
2020/8/4
武汉理工大学机电学院
24/27
料斗实例
料斗1、回转圆盘2、磁铁块3、 受料管4、刮板5、拨料器6
2020/8/4
武汉理工大学机电学院
25/27
四、振动式料斗装置
1 基本结构 2 振动上料原理 3 定向方法 4 振动料斗设计 5 振动料斗生产率
自动上下料机械手臂及主要零部件设计

自动上下料机械手臂及主要零部件设计自动上下料机械手臂是一种用于工业生产中的自动化设备,主要用于将原材料从储存区域送到生产线上,并将成品从生产线上移出。
它具有快速、精准和高效的特点,可以大大提高生产效率和降低劳动力成本。
在设计自动上下料机械手臂及其主要零部件时,需要考虑以下几个方面:1.机械手臂结构设计:机械手臂应该具有灵活的结构,能够适应不同形状和尺寸的工件。
常见的机械手臂结构包括:伺服电机传动、滑块传动、摆线减速齿轮传动等。
机械手臂的关节数量和布局应根据具体需要进行设计,以保证其灵活性和稳定性。
2.机械手臂控制系统设计:机械手臂的控制系统应该具备高精度的位置控制能力和快速的响应速度。
常用的控制方法包括:PID控制、模糊控制、神经网络控制等。
控制系统应能够实现自动化的上下料操作,并能够适应不同工况下的控制需求。
3.夹具设计:夹具是机械手臂上用于抓取和移动工件的部件。
夹具的设计应该考虑到工件的形状、尺寸和重量等因素,并保证夹持力的稳定性和安全性。
常见的夹具设计包括机械夹具、气动夹具和真空夹具等。
4.传感器设计:传感器是机械手臂上的重要部件,用于检测工件位置、重量和形状等信息。
常见的传感器包括光电传感器、压力传感器和力传感器等。
传感器的选型和布局应根据具体的应用需求进行设计,以提供准确的反馈信息。
5.安全措施设计:机械手臂在工作时可能存在风险,因此需要设计相应的安全措施来保护操作人员和设备的安全。
常见的安全措施包括急停按钮、防撞装置和速度监控系统等。
总之,设计自动上下料机械手臂及主要零部件需要充分考虑机械结构、控制系统、夹具设计、传感器设计和安全措施等方面的要求,以保证机械手臂的可靠性和性能。
同时,根据具体的应用需求,也需要进行相应的优化和改进,以满足不同的生产场景。
3.自动上料机构

3.钓式料斗: 工作原理:料斗底部呈倾斜式,自动滚出、位置正确的工件被转盘3上的钩 子3抓走,然后滑入料管1,闸门4控制工件的流量。 适用:长度大于直径的管状或套状的工件。
4.转盘形孔式料斗: 工作原理: 当工件成批倒故料斗 后进入转筒3,一部分工 件进入圆环2和转盘1之 间,利用与工件型面相当 的柱套5,使只有开口向 左定向正确的工件才能落 入转动的圆环2和圆盘1 的缝隙中去,然后被带出 型孔而进入料槽6中。 适用:盘盖类工件的定向和上料。(直径小于60㎜,高度与直径比小于1)
3. 商标卷筒纸上料机构: 要使商标正确定位,它要复杂得多,主要消除纸带在输送过程中,因受力、 温度、湿度等各种因素所引起的长度的累积误差。 主要增加光电检测自动定位装置和运动合成机构。 纸带商标自动定位装置的组成: 1)纸带定长、切断机构。 2)光电控制装置。 3)信号识别用同步凸轮机构。 4)运动合成机构。 简介:1)同步凸轮机构。 2)运动合成机构。 锥齿轮运动合成机构。 圆柱齿轮运动合成机构。
2)棒料夹紧机构:(由三部分组成) ① 驱动机构 一般采用凸轮机构,有时也用液压、气动或电动。 ② 增力机构 一般采用杠杆、斜面结构,增加机构的夹紧力和自锁性。 ③ 棒料的夹紧夹头 要求对中心好、夹紧力与切削力作用方向相同。
二、棒料上料的典型结构 1.摩擦轮式棒料自动上料方法: 特点:1)能自动连续送料。 2)一次送出的棒料的长度可以很长。 3)结构较简单。 4)如能采用隔音套管,能减少噪声与磨损。 5) 所占空间尺寸较大。(长度方向)
§3 - 4
件料自动上料机构
2. 料斗式上料: 适用:形状简单、重量不大,但 批量较大,加工时间短 的
一、件料上料机构的分类和组成 1.料仓式上料: 适用:尺寸和重量较大的工件,或 经不起摩擦、碰撞的工件, 或形状复杂、定向困难的工 件。 组成:料仓、拱形消除器、输料槽、 送料机构、驱动机构及安全装 置等。
轴套类零件自动上下料机构设计详解

目录摘要 (Ⅰ)ABSTRACT (Ⅱ)第一章绪论 (1)1.1课题背景及目的 (1)1.2本课题研究的意义 (1)1.3自动上下料机构的组成分类及特点 (2)第二章总体设计方案 (3)2.1机械手设计要求 (3)2.2动作要求分析 (4)2.3机械手的基本形式 (4)2.4机械手材料的选择 (5)2.5自动上下料机构布局拟定 (5)2.6驱动方式的选择 (7)2.7 CK6140型数控车床的主要参数 (8)第三章机械手结构设计 (9)3.1手部的设计 (9)3.1.1手部的概述 (9)3.1.2机械手部的典型结构 (9)3.1.3手爪设计原则 (12)3.1.4机械式手爪设计 (12)3.1.5手部驱动力计算 (13)3.2臂部的设计 (16)3.2.1手臂的常用机构 (17)3.2.2手臂设计原则 (17)3.2.3臂部驱动力计算 (18)3.3机身的设计 (21)3.3.1机身的整体设计 (21)3.3.2机身回转机构的设计计算 (24)3.3.3机身升降液压缸的设计计算 (26)第四章机械手的运动分析 (33)4.1液压缸的设计选择 (33)4.2 机械手的手爪的运动 (34)4.3 机械手的臂部的运动 (34)4.4 机械手的整体运动分析 (34)总结 (36)致谢 (37)参考文献 (38)摘要本课题主要进行生产线轴套类零件自动上下料机构设计,该设计属于机械手的一部分,生产线轴套类零件自动上下料机构是在机械化、自动化生产过程中发展的一种新型装置,实现了胚料的抓取、自动定位、夹紧以及工件的回放。
机械手能代替人类重复完成枯燥危险的工作,提高劳动生产力,减轻人的劳动强度。
该机构涵盖了位置控制技术、可编程序控制技术、检测技术等。
本课题设计的液压机械手可在空间抓放物体,动作灵活多样。
根据工件的变化及生产技术的要求随时更改相关参数,可代替人工在高温危险区进行作业。
关键词:机械手轴套类零件自动上下料机构提升旋转ABSTRACTThis topic mainly production spool and sleeve type parts automatic feeding mechanism design. The design is part of the manipulator, the production spool and sleeve type parts automatic feeding mechanism is the development of mechanization and automation of the production process of a new type of device to achieve the blank to grab, automatic positioning, clamping and workpiece playback. Mechanical hand can replace the human to complete the boring work, improve labor productivity, reduce labor intensity. The organization covers the position control technology, programmable control technology, detection technology, etc.. This topic design of the hydraulic manipulator can grasp the object in space, flexible and diverse movements. According to the change of workpiece and production technology requirements at any time to change the relevant parameters, can be used to replace manual work in the high temperature danger zone.Key words:mechanical hand, automatic loading and unloading mechanism, lifting, rotation第一章 绪论1.1课题背景及目的纵观目前我国的发展情况,如果把万能车床改成自动或半自动机床,那么就能充分发挥万能机床的潜力,这对制造业的生产无疑是有重大意义的。