9矩阵桁架例题解析
结构力学课后习题解答:9矩阵位移法习题解答.docx

第9章矩阵位移法习题解答习题9.1是非判断题(1)矩阵位移法既可计算超静定结构,又可以计算静定结构。
()(2)矩阵位移法基本未知量的数目与位移法基本未知量的数目总是相等的。
()(3)单元刚度矩阵都具有对称性和奇异性。
()(4)在矩阵位移法中,整体分析的实质是建立各结点的平衡方程。
()(5)结构刚度矩阵与单元的编号方式有关。
()(6)原荷载与对应的等效结点荷载使结构产生相同的内力和变形。
()【解】(1)正确。
(2)错误。
位移法中某些不独立的杆端位移不计入基本未知量。
(3)错误。
不计结点线位移的连续梁单元的单刚不具奇异性。
(4)正确。
(5)错误。
结点位移分量统一编码会影响结构刚度矩阵,但单元或结点编码则不会。
(6)错误。
二者只产生相同的结点位移。
习题9.2填空题(1)矩阵位移法分析包含三个基本环节,其一是结构的,其二是分析,其三是分析。
(2)已知某单元的定位向量为[3 5 6 7 8 9]七则单元刚度系数炫应叠加到结构刚度矩阵的元素中去。
(3)将非结点荷载转换为等效结点荷载,等效的原则是。
(4)矩阵位移法中,在求解结点位移之前,主要工作是形成矩阵和_________________ 列阵。
(5)用矩阵位移法求得某结构结点2的位移为4=[. V2 ft]T=[0.8 0.3 0.5]T,单元①的始、末端结点码为3、2,单元定位向量为尸>=[0 0 0 3 4 5]T ,设单元与x轴之间的夹角为a =买,则2 尹> =O(6 )用矩阵位移法求得平面刚架某单元在单元坐标系中的杆端力为F e =[7.5 -48 -70.9 -7.5 48 -121.09]T ,则该单元的轴力心=kN。
【解】(1)离散化,单元,整体;(2)灯8;(3)结点位移相等;(4)结构刚度,综合结点荷载;(5)[0 0 0 0.3 -0.8 0.5]。
(6)-7.5o离、空的值以及K ⑴中元素妍、愚、姒的值。
【解】各刚度系数的物理意义如习题解9.3图所示。
第五章 桁架及组合布局习题解答

I
3m
3m
C
P
0 0
N CD
10 10
Nb
3 3
N
4 5
FE
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,通系电1,力过根保管据护线生高0不产中仅工资2艺料22高试2可中卷以资配解料置决试技吊卷术顶要是层求指配,机置对组不电在规气进范设行高备继中进电资行保料空护试载高卷与中问带资题负料2荷试2,下卷而高总且中体可资配保料置障试时2卷,32调需3各控要类试在管验最路;大习对限题设度到备内位进来。行确在调保管整机路使组敷其高设在中过正资程常料1工试中况卷,下安要与全加过,强度并看工且25作尽52下可22都能护可地1关以缩于正小管常故路工障高作高中;中资对资料于料试继试卷电卷连保破接护坏管进范口行围处整,理核或高对者中定对资值某料,些试审异卷核常弯与高扁校中度对资固图料定纸试盒,卷位编工置写况.复进保杂行护设自层备动防与处腐装理跨置,接高尤地中其线资要弯料避曲试免半卷错径调误标试高方中等案资,,料要编试求5写、卷技重电保术要气护交设设装底备备置。4高调、动管中试电作线资高气,敷料中课并设3试资件且、技卷料中拒管术试试调绝路中验卷试动敷包方技作设含案术,技线以来术槽及避、系免管统不架启必等动要多方高项案中方;资式对料,整试为套卷解启突决动然高过停中程机语中。文高因电中此气资,课料电件试力中卷高管电中壁气资薄设料、备试接进卷口行保不调护严试装等工置问作调题并试,且技合进术理行,利过要用关求管运电线行力敷高保设中护技资装术料置。试做线卷到缆技准敷术确设指灵原导活则。。:对对在于于分调差线试动盒过保处程护,中装当高置不中高同资中电料资压试料回卷试路技卷交术调叉问试时题技,,术应作是采为指用调发金试电属人机隔员一板,变进需压行要器隔在组开事在处前发理掌生;握内同图部一纸故线资障槽料时内、,设需强备要电制进回造行路厂外须家部同出电时具源切高高断中中习资资题料料电试试源卷卷,试切线验除缆报从敷告而设与采完相用毕关高,技中要术资进资料行料试检,卷查并主和且要检了保测解护处现装理场置。设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
用矩阵位移法计算桁架结构支座反力的简便方法

2012 年第 21 卷第 2 期 84 高等建筑教育
F HA = F VA = F WA =
∑ ( e) ∑ ( e) ∑ ( e)
± F N cosα - F Px ± F N cosβ - F Py ± F N cosγ - F Pz 。 ( a)
( e) 珔 和末结点杆端力 F 它们与桁杆轴力 F N 的关系为 Nj , ( e) ( e) 珔 珔 F = - FN , F = FN Ni Nj
F VA 和 F WA 分别为支座 A 沿整体坐标 式中: F HA 、 x、 y 和 z 方向的支座反力; α 、 β 和 γ 分别是单元坐标 ( e) 珋 轴 x ( 图 1 中标于单元上的箭头为其方向 ) 相对于
( e) ( e) 珋 对于 x 轴沿其他象限延伸的情况, 以及平面
珋 的方 现设始结点 i 连于支座 A, 单元坐标轴 x ( e) 珋 轴沿第一象限延伸 ) , 向余弦均为正 ( 即 x 如图 2 ( a) 所示可得
式( e) 亦均适用。 桁架支座反力的计算, 三、 桁架支座反力计算流程图和算例 ( 一) 桁架支座反力计算流程图
A simple solution of truss reactions with matrix displacement method
WANG Daquan, WEN Guozhi ( College of Civil Engineering,Chongqing University,Chongqing 400045 ,P. R. China) Abstract: A truss reactions often need to be solved after the structure is calculated by matrix displacement method. It is inconvenience that the rational solution based on the truss axial force needs to determine the sign of sum terms according to whether the beginning joint or the ending joint is connected to the support. But if the convention is changed to matrix displacement method, a new reaction formula based on elementend forces can be deduced and efficiently solve the deficiency, and then, can also decrease the complication in teaching and programming. Keywords: truss; reactions; matrix displacement method
有限元原理 结构矩阵分析(平面桁架 平面应力) 变分
第二章 结构矩阵分析由于有限元方法起源于力学中的结构分析,本章的作用是通过三个典型问题说明有限元方法应用于结构分析时的一般步骤,并借此了解有限元方法的一些基本概念。
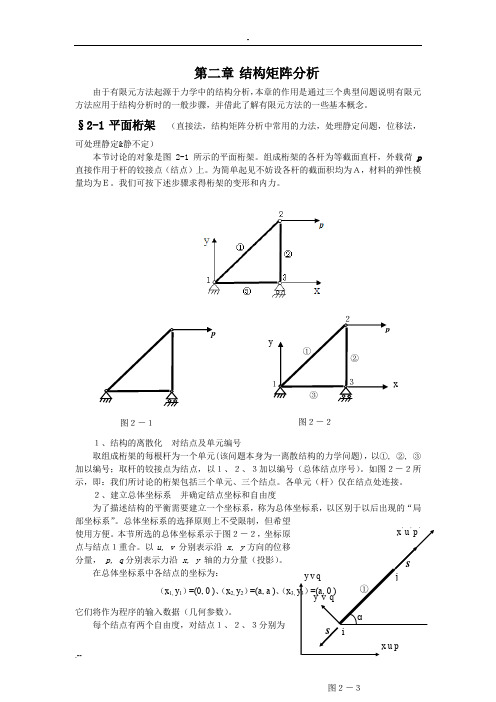
§2-1平面桁架(直接法,结构矩阵分析中常用的力法,处理静定问题,位移法,可处理静定&静不定)本节讨论的对象是图2-1所示的平面桁架。
组成桁架的各杆为等截面直杆,外载荷p 直接作用于杆的铰接点(结点)上。
为简单起见不妨设各杆的截面积均为A,材料的弹性模量均为E。
我们可按下述步骤求得桁架的变形和内力。
1、结构的离散化 对结点及单元编号取组成桁架的每根杆为一个单元(该问题本身为一离散结构的力学问题),以①, ②, ③ 加以编号;取杆的铰接点为结点,以1、2、3加以编号(总体结点序号)。
如图2-2所示,即:我们所讨论的桁架包括三个单元、三个结点。
各单元(杆)仅在结点处连接。
2、建立总体坐标系 并确定结点坐标和自由度为了描述结构的平衡需要建立一个坐标系,称为总体坐标系,以区别于以后出现的“局部坐标系”。
总体坐标系的选择原则上不受限制,但希望使用方便。
本节所选的总体坐标系示于图2-2,坐标原点与结点1重合。
以u, v 分别表示沿 x, y 方向的位移分量, p, q 分别表示力沿 x, y 轴的力分量(投影)。
在总体坐标系中各结点的坐标为:它们将作为程序的输入数据(几何参数)。
每个结点有两个自由度,对结点1、2、3分别为图2-1x 图2-2(x 1, y 1)=(0, 0 )、(x 2, y 2)=(a, a )、(x 3,若暂时不考虑支承约束条件,整个结构的结点自由度为 3、单元分析(建立结点力与结点位移之间的关系) 取一个一般性的单元,设它的两个结点在结构中的编号为i, j (单元内部的结点序号)。
由材料力学可知,杆的轴向刚度为EA/L 。
其中L为杆的长度:(1)单元局部坐标系现选取一典型单元对其进行单元分析,对所分析的单元按如下方式建立一个坐标系: 原点:与结点i 重合, x ’轴:沿 i ,j 方向, y ’轴:与x ’轴垂直。
第二章桁架梁问题
序号
EPSWAXL
EPINAXL
LEPTH
LEPTH
2
3
-
-
EPPLAXL
EPCRAXL SEPL SRAT HPRES EPEQ MFORX
LEPPL
LEPCR NLIN NLIN NLIN NLIN SMISC
1
1 1 2 3 4 1
-
-
FLUEN
TEMP
NMISC
LBFE
-
1
1
2
2
Name EL NODES MAT
应变
应力:
2.2 梁问题 2.2.1概述 桁架结构假设杆只考虑拉压力,不考虑弯曲,扭转力, 计算精度低,梁考虑了弯曲、扭转效应,计算精度和 适应范围比桁架高。 Beam3:二维单轴等截面梁,考虑拉压,弯曲力,不考虑扭 转力. Beam4:三维单轴等截面梁,考虑拉压,弯曲力,扭转力. Beam23:2表示塑性变形,3:Beam3 Beam24:2表示塑性变形,4:Beam4 Beam44:三维不对称锥形梁,受力后横截面不再假设为 平面。 Beam54:二维不对称锥形梁 Beam161:用于动力学分析
计算每个节点合力,合力应为0或外力,比如节点1处。 [( xk x1 ), ( yk y1 ), ( zk z1 )] E1,k A1,k l1,k l1,k k [( x1 xk )(u1 uk ) ( y1 yk )(v1 vk ) ( z1 zk )( w1 wk )] 0或F1外力 其中E1,k,A1,k,l1,k 为杆o1ok的弹性模量,截面积,长度。
位移计算结果
桁架杆的应力应变必须通过单元表显示。 步骤如下: (A)通过 by Sequence Number定义单元表输出 项 (B)选择单元表绘制显示计算结果
第九章 矩阵位移法例题

Cy
=
3 5
⎡ 192
[k](4) =
EA
⎢ ⎢
144
3000 ⎢−192
⎢⎣− 144
144 108 − 144 − 108
− 192 − 144 192 144
− 144⎤
− 108⎥⎥
144 ⎥
108
⎥ ⎦
贡献刚度矩阵
⎡192 144 0 0⎤
[K ](4) = EA ⎢⎢144 108 0 0⎥⎥
⎪⎪ ⎨ ⎪
40 0
⎪⎪ ⎬
=
⎪⎪ ⎨
⎪⎪
0 0
⎪⎪ ⎬ ⎪
⎢0 − 3 − 6 0 3 − 6⎥ ⎪ 0 ⎪ ⎪ 60 ⎪ ⎪ 22.74 ⎪
⎢ ⎢⎣0 6
8
0
−6
⎥ 16 ⎥⎦
⎪⎪⎩ 12.033 ⎪⎪⎭
⎪⎪⎩− 40⎪⎪⎭ ⎪⎪⎩−10.98⎪⎪⎭
{ } 单元(2){δ }(2) = δ (2) = 1 {− 50.081 0 12.033 − 50.081 0 11.382}T EI
结点 4 荷载
荷载贡献
{P}= {0 0 0 20}T
总荷载向量
{P}= {−10 −13.33 13.33 10}T
解结构方程,求出位移向量
{∆} = 1 {− 50.081 −19.350 12.033 11.382}T
EI 求单元内力
{ } 单元(1){δ }(1) = δ (1) = 1 {− 50.081 0 −19.350 − 50.081 0 12.033}T EI
⎢ ⎢⎣0 6
⎥ 8 0 − 6 16 ⎥⎦
⎪⎪⎩11.382⎪⎪⎭ ⎪⎪⎩ 10 ⎪⎪⎭ ⎪⎪⎩ 2.60 ⎪⎪⎭
桁架结构的建模与分析计算PPT课件
D4
C
a
a
a
a
nm F
先用截面m。
MC 0, 求出杆1的内力F1。
再用截面n。 M D 0, 求出杆2的内力F2。
Thank you for your attention!
Fx 0 F1 F3 F2 cos 600 0
F1
4 9
3P(压)2 F2来自 9 3P(拉)F3
3P 3
(拉)
截面法求解要点 假想用一截面截取出桁架的某一部分 作为研究对象,此时被截杆件的内力作为研究对象的外力, 可应用一般力系的平衡条件列平衡方程求出被截杆件的未 知内力。
焊接(φ12) 焊接(φ14) -369.702 -396.562 -642.960 -793.124 -916.218 -1007.482
第8杆件内力测量结果
铆接 -353.628 -707.256 -878.712
理论计算 -377.202 -754.404 -943.005
加载980N 加载1960N 加载2450N
应用相应的汇交力系的平衡条件列平衡方程求30cos60cos用截面mn分桁架为两部分取桁架左边部分截面法60sin假想用一截面截取出桁架的某一部分作为研究对象此时被截杆件的内力作为研究对象的外力可应用一般力系的平衡条件列平衡方程求出被截杆件的未知内力
桁架结构的建模与分析计算
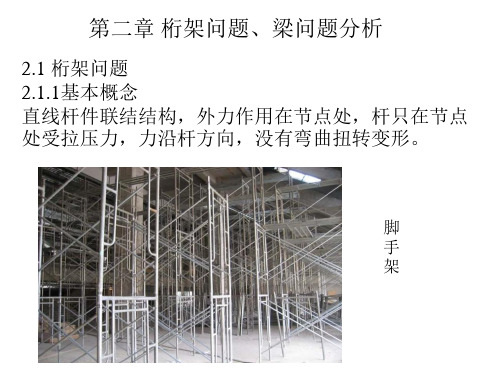
一、引言 桁架结构
桁架是由若干直杆在两端通过焊接、铆接 所构成的几何形状不变的工程承载结构。
例16-1 已知:平面桁架节点E处受载荷P,各杆长度均为l; 求: 1、2、3杆受力。
解: 取整体,求支座约束力
由平面力系平衡条件列平衡方程
Fx 0 FAx 0
有限元原理 结构矩阵分析(平面桁架 平面应力) 变分

设平面桁架单元在总体坐标系中刚度矩阵的一般形式为
由(2-1-8),当单元结点位移为{1 0 0 0 }T时,在单元各结点上施加的力刚好为单元刚度矩阵中的第一列:{k11k21k31k41}T。对[k]的其他各列也可做出类似的解释。即单元刚度矩阵的每一列相当于一组特定位移下的结点力,如表2-1所示。由图2-4可以获得更为直观的理解。
它们将作为程序的输入数据(几何参数)。
每个结点有两个自由度,对结点1、2、3分别为
若暂时不考虑支承约束条件,整个结构的结点自由度为
3、单元分析(建立结点力与结点位移之间的关系)
取一个一般性的单元,设它的两个结点在结构中的编号为i, j(单元内部的结点序号)。由材料力学可知,杆的轴向刚度为EA/L。其中L为杆的长度:
单元结点自由度{u}={uiviujvj}T
结点给单元的力{r}={piqipjqj}T
在图2-3中,x’轴与x轴的夹角为α
结点的位移分量的坐标变换为
单元的位移分量的坐标变换为
或缩写为
类似,{r’}与{r}之间的转换关系为
由于
是正交矩阵,因此
也是正交矩阵。所以有
将(2-1-4)、(2-1-5)代入(2-1-2)有
为了描述结构的平衡需要建立一个坐标系,称为总体坐标系,以区别于以后出现的“局部坐标系”。总体坐标系的选择原则上不受限制,但希望使用方便。本节所选的总体坐标系示于图2-2,坐标原点与结点1重合。以u, v分别表示沿x, y方向的位移分量,p, q分别表示力沿x, y轴的力分量(投影)。
在总体坐标系中各结点的坐标为:
对结点1:
对结点2:
对结点3;
可以合并成
式(2-1-14)的右边为外载荷和支反力。左边则为单元给结点的力,它们是未知的,但可以借助单元刚度矩阵以结点位移来表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x M2 v2 Fx2
v1
Fx1 u1 Fy1
θ2
u2
Fy1
(1)、轴向位移与轴向力 Fex1 1 2 2’ 1’
EA
e l
u1e
e = EA/l k 11 1 1’
u2e
F ex2
e = -EA/l k 2 21
1
e = - EA/l k 12 1
EA l
2
EA l
e = EA/l k 2’ 22
e
l2
12EI l3
6EI
l2
l3
2EI 2EI
4EI
4EI
l
l
l
6EI l2
e
l
-6EI l2
v2e=1
12EI e 6EI θ e e Fy 1 = 3 v 1+ 2 1 l l M1
e=
6EI e 4EI θ e v + 1 1 2 l l
12EI e 6EI e θ2 v + l3 2 l2 6EI e 2EI e θ2 v + l2 2 l
12EI 12EI 6EI 6EI θ e e e e e θ + Fy 2 = v v 1 1 l3 l2 l3 2 l2 2 M2
e=
6EI e 2EI θ e v 1+ 1 2 l l
6EI e 4EI e θ2 v + 2 2 l l
( 10-3 )
由此可得:
F x1
e=
EA
12EI 6EI e θ1 F ye1 = v e1+ v e2+ l3 l2 l3 6EI 6EI 4EI e θ1 M e1 = v e1+ v e2+ l2 l l2 EA e e F x2 = (u e1 + u 2 ) l 12EI 12EI 6EI e θ1+ F ye2 = v e1 v e2 l3 l2 l3
第 十 章
矩阵位移法
§10-1、概述
• 一、结构矩阵分析方法要点 • 结构矩阵分析方法是电子计算机计 算技术进入结构分析领域后,产生的一 种结构计算方法。 • 结构矩阵分析方法与传统的结构分 析方法原理上完全一致。但由于计算工 具不同,作法上有所差异。
• 传统人工手算: • • 电子计算机计算: • • • • •
• • 根据单元分析(杆件)与整体(结构)分析 的不同需要,采用两种直角坐标系。
1
局部坐标系以杆轴为x轴,“ 1”为始端, “ 2 ”为终端。1 2为正方向。 • 局部坐标系下所有量值的正负号规定:杆端 位移和杆端力分量与局部坐标方向一致为正。 x e x e
1
y
EA , EI, l
EA , EI, l 2
速度低,精度差。 忌繁重的计算工作量。 速度快,精度高。 忌无规律可循。
学习结构矩阵分析,先修课为: 1、结构力学 (理论基础) 2、线性代数矩阵运算 (建模工具) 3、电算语言 (机算方法)
•
矩阵分析方法的理论基础是传统结 构力学,说明结构矩阵方法与传统结构 力学同源。由于形成的年代和条件不同, 引来了方法上的差异。因此,学习中我 们应该注意,两种方法的共同点和结构 矩阵方法新的着眼点(矩阵符号的运用、 坐标的引入、未知量的判断与单元类型 的关系、刚度集成的概念等)。 • 矩阵运算用简洁的符号代替传统的 运算表达式,公式单一、紧凑、统一, 便于计算机计算程序的自动化运算。
一、单元的划分
• 杆系结构中,任何相邻两个结点之间的杆段 都是一个杆件单元,一般采用等截面直杆单元。 • 结点:
•
构造结点:杆件折转点,交汇点,支承点,自由
端,截面突变处等。 • 非构造结点:集中荷载作用点;曲线杆件计算时, 可将一个曲杆视为由许多折杆组成,其人为设定折点 处。
2、局部坐标系(单元坐标系、杆件坐标系)
2
y
1
EA , EI
e
2 M2 v2
x
M1
Fy1 u1
l θ1 θ2
v1
Fx1
u2
Fx2 Fy1
y
用{F}e代表单元 e 的杆端力列向量:
{F } F (1) F (2) F (3) F (4) F (5) F (6)
e
eT
= ( F x1 F y1 M 1 F x 2 F y 2 M 2 )
1
EA e) e u ( Fx1 u1 2 l EA e e) Fx2 = + u (u e 1 2 l
e=
(10-2)
(2)、横向位移、转角位移与杆端力
6EI v1e=1 -6EI l2 -12EI -6EI l2
e
12EI l3 θ1e=1 e 6EI l2 -6EI l2 -12EI l3
eT
用{Δ}e代表单元 e 的杆端位移列向量:
{} (1) (2) (3) (4) (5) (6)
e 1
u
eT
v1 1 u 2 v 2 2
eT
( 10-1)
3、局部坐标中等截面直杆单元的单元刚度方程
• •
•
推导过程如位移法,注意几点:
①、重新规定正负号;②、采用矩阵形式。
结构矩阵分析方法又称为:杆件 有限单元法;计算结构力学。包括: • 矩阵力法(柔度法),以力法为 基础。 • 矩阵位移法(刚度法),以位移 法为基础。 • 矩阵混合法,以混合法为基础。
•
矩阵位移法方法要点:
• (1)、离散化(单元分析):先把 结构整体拆开,分成若干有限数目的单 元体,进行单元分析。找出单元杆端力 与杆端位移的关系,建立单元刚度方程。 • (2)、集合(整体分析):利用静 力平衡条件和变形协调条件,将各离散 单元在结点上相互连接起来。使结点上 的受力变形情况与原结构完全相同,进 行整体分析。建立整体刚度方程。
等截面直杆单元,在变形过程中,考虑弯曲变 形和轴向变形的影响。因此,在左右两端各有三 个独立的位移分量(两个线位移,一个角位移)。 杆件共有六个杆端位移分量,相应的有六个杆端 力分量。 单元刚度方程是指由单元杆端位移求单元杆端 力时所建立的方程 —— 记为“ Δ → F ”方程。
Байду номын сангаас
e 1 M1
θ1
2
二、需讨论的问题:
• 1、单元分析,在矩阵位移法中取何 种单元,并找出各单元的杆端位移和杆 端力之间的关系。 • 2、整体分析,如何由单元分析直接 集成整体分析。 • 3、建立结构的刚度方程,求解并找 出各杆端内力。
§10-2、单元刚度矩阵(局部坐标系)
• 单元分析的主要任务:研究单元杆端 位移与杆端力之间的关系。 • 推导方法:根据变形与力之间的物理 关系,采用矩阵形式。
计算过程示意:
•
• • • •
由于位移法有其自身的优点,易于实现计 算过程的程序化,目前在工程界应用广泛。 故在此只介绍矩阵位移法。 矩阵位移法与传统位移法力学概念完全 一致。其中: 基本未知量:结构的独立结点位移。 基本体系:加上人为约束的动定结构。 基本方程:根据结点(或截面)平衡条 件和变形协调条件建立的刚度方程。