第9章 矩阵位移法 例题
第九章矩阵位移法习题集
第九章 矩阵位移法 【练习题】9-1 是非题:1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。
2、单元刚度矩阵均具有对称性和奇异性。
3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。
5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。
6、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。
7、结构刚度方程矩阵形式为:[]{}{}K P ∆=,它是整个结构所应满足的变形条件。
8、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。
9、等效结点荷载数值等于汇交于该结点所有固端力的代数和。
10、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。
11、矩阵位移法既能计算超静定结构,也能计算静定结构。
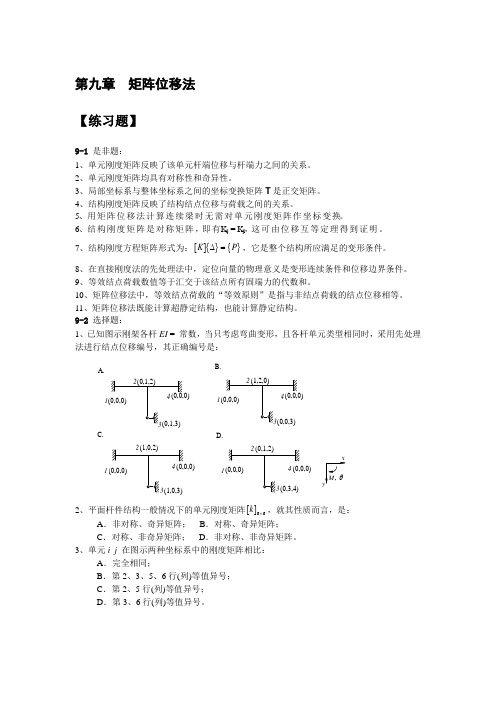
9-2 选择题:1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是:(0,1,2)(0,0,0)(0,0,0)(0,1,3)(0,0,0)(1,2,0)(0,0,0)(0,0,3)(1,0,2)(0,0,0)(0,0,0)(1,0,3)(0,0,0)(0,1,2)(0,0,0)(0,3,4)A.B.C.D.21341234123412342、平面杆件结构一般情况下的单元刚度矩阵[]k 66⨯,就其性质而言,是: A .非对称、奇异矩阵; B .对称、奇异矩阵; C .对称、非奇异矩阵; D .非对称、非奇异矩阵。
3、单元i j 在图示两种坐标系中的刚度矩阵相比:A .完全相同;B .第2、3、5、6行(列)等值异号;C .第2、5行(列)等值异号;D .第3、6行(列)等值异号。
jxi4、矩阵位移法中,结构的原始刚度方程是表示下列两组量值之间的相互关系: A .杆端力与结点位移; B .杆端力与结点力; C .结点力与结点位移; D .结点位移与杆端力 。
矩阵位移法的计算步骤及示例
单元①②和③:
35
⎡ 500 0 0 − 500 0 0 ⎤
⎢ ⎢
0
12 24
0
− 12
24
⎥ ⎥
(1)
k
=
(2)
k
=
(3)
k
=
10
3
⎢ ⎢⎢−
0 500
24 0
64 0
0 − 24 32 ⎥
500 0
0
⎥ ⎥
⎢ 0 −12 − 24 0 12 − 24⎥
⎢ ⎢⎣ 0
24 32
0
− 24
⎥ 64 ⎥⎦
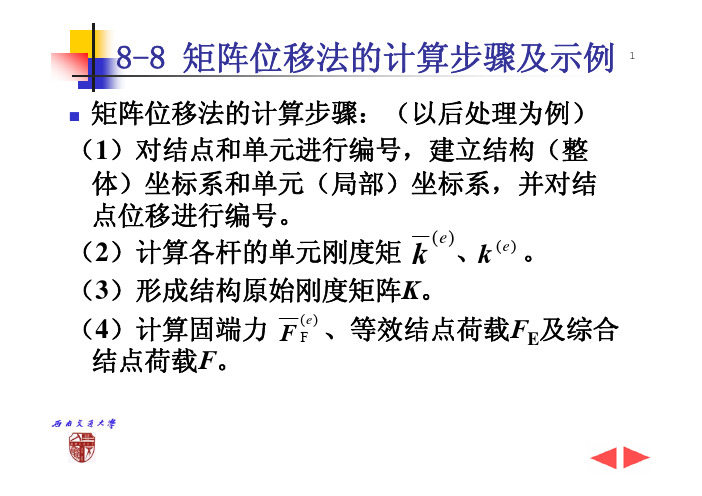
8-8 矩阵位移法的计算步骤及示例 1
矩阵位移法的计算步骤:(以后处理为例)
(1)对结点和单元进行编号,建立结构(整
体)坐标系和单元(局部)坐标系,并对结
点位移进行编号。
(2)计算各杆的单元刚度矩 k (e)、k (e) 。
(3)形成结构原始刚度矩阵K。
(4)计算固端力
F
(e) F
、等效结点荷载FE及综合
⎢⎣0.0 0.0 6.0 12.0⎥⎦
由于连续梁的单元刚度矩阵为非奇异矩阵, 由此组集而成的结构刚度矩阵K 也是非奇异 的,故无需再进行支座约束条件处理。
(4)计算固端力列阵及等效结点 15 荷载列阵。
②单元的固端力列阵
F (2) F
=
⎧ 300 ⎫ ⎩⎨− 300⎭⎬kN
⋅
m
等效结点荷载列阵:
k(3)
=
⎢ ⎢ ⎢
l(3) 2EI
⎢⎣ l ( 3 )
4
2EI l(3) 4EI l(3)
⎤ ⎥ ⎥ ⎥ ⎥⎦
3 4
(3)集成结构刚度矩阵K
09矩阵位移法(学习版)(1)

1
2
3 6
4
y
5
θ x
O
练习:
3 ④ 2 ① 1
8 ⑨ ⑤ 6 ⑦ ② 4 5 ⑧ 7 ⑩ ⑥
13
12 10 11 ③ 9
(2)结点位移编码 矩阵位移法基本未知量的确定: 矩阵位移法基本未知量的确定不是唯一的,它与 单元如何划分,是否考虑轴向变形以及如何编写程序 有关。 结点位移的统一编码 —— 整体码 用矩阵位移法进行结构分析时,基本未知量是结点 位移,这就需要将结构中全部结点位移分量进行统一编 码。
第九章
矩阵位移法
9.1 概述
1. 概述
结构矩阵分析是采用矩阵方法分析结构力学问题的 一种方法。与传统的力法、位移法相对应,结构矩阵分 析中也有矩阵力法和矩阵位移法,或柔度法与刚度法。 矩阵位移法易于实现计算过程程序化而被广泛应用。 矩阵位移法是以结点位移为基本未知量,借助矩阵 进行分析,并用计算机解决各种杆系结构受力、变形等 计算的方法。
e
e
建立单元的杆端力和杆端 位移之间关系的过程称单元分 析,形成的方程称单元刚度方 程。
e
⎡δ 1 ⎤ ⎡ u i ⎤ ⎢ ⎥ ⎢ ⎥ δ 2 ⎥ ⎢ vi ⎥ ⎢ e ⎡ δ i ⎤ ⎢δ 3 ⎥ ⎢θ i ⎥ e δ =⎢ ⎥ =⎢ ⎥ =⎢ ⎥ ⎣δ j ⎦ ⎢δ 4 ⎥ ⎢u j ⎥ ⎢δ 5 ⎥ ⎢ v j ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎦ ⎦ ⎢ ⎣θ j ⎥ ⎣δ 6 ⎥
2. 单元分析
y y e i x
α
j x
局部坐标系(单元坐标系):进行某一单元的单元分析时所 建立的坐标系。 局部坐标系相对于整体坐标系的方位角用α表示。α的方向 以 x 轴向 x 轴逆时针转动为正。即便在一个结构中,各单元的局 部坐标系也不完全相同。
第9章 矩阵位移法 例题

第9章 矩阵位移法习 题9-1:请给图示结构编号(同时用先处理法和后处理法)及建立坐标。
题9-1图 9-2:求图示连续梁的整体刚度矩阵。
题9-2图9-3:求图示刚架的整体刚度矩阵。
(c )(e )题9-3图9-4:求图示组合结构的整体刚度矩阵。
题9-4图9-5:求图示桁架结构的整体刚度矩阵,所有杆件的EA 均相同。
题9-5图9-6:求图示排架结构的整体刚度矩阵。
题9-6图 9-7:求图示结构的等效结点荷载,请利用结构的对称性。
1kN/m题9-7图9-8:求图示结构的等效结点荷载,请利用结构的对称性。
题9-8图9-9:求图示结构的等效结点荷载。
题9-9图9-10:求出图示结构的荷载列阵。
题9-10图9-11:求出图示结构的荷载列阵,请分别用先处理法和后处理法进行编号。
qq题9-11图9-12:求图示结构的荷载列阵,考虑轴向变形。
题9-12图9-13:求图示结构的荷载列阵。
题9-13图9-14:图示连续梁中间支座发生了下向的移动a ,请求出其整体刚度方程。
题9-14图10kN/mq9-15:请求出图示连续梁的整体刚度方程。
题9-15图9-16:求图示连续梁的整体刚度矩阵。
题9-16图9-17:图示结构温度发生了变化,请求出整体刚度方程。
杆件的EI 、EA 相同。
题9-17图9-18:图示结构温度发生了变化,请求出整体刚度方程。
题9-18图9-19:图示结构发生了支座移动,请画出结构的内力图。
00题9-19图9-20:已知图示梁B 点的B v 、B ϕ和C 点的C ϕ,请求出单元杆端力的列阵。
题9-20图9-21:求题9-3图示刚架的整体刚度矩阵,忽略轴向变形。
9-22:求题9-10图示结构的整体刚度矩阵,用后处理法编号。
9-23:求出梁的整体刚度方程,弹簧的刚度系数为k 。
题9-23图9-24:求出图示结构的整体刚度方程,忽略轴向变形,弹簧刚度系数为k 。
题9-24图L。
矩阵位移法例题1

50 3 10 15 57 . 5
3 . 891 50 6 . 228 15 79 . 625 57 . 5
2 . 2387 10 6 m 7 2 . 6993 10 m 4 . 2905 10 6 rad
矩 阵 位 移 法(例题)
结构刚度方程为
F K
即
50 202 . 667 3 8 10 15 10 57 . 794 57 . 5 14 . 425 57 . 794 129 . 422 12 . 948 14 . 425 1 12 . 948 2 127 . 306 3
1 (0,0,0)
5m
y
(2)
(1 )
( 2 )
o
x
5m
(0,0,0) 3
2.5m
矩 阵 位 移 法(例题)
单元(1)
0
168 0 0 8 10 168 0 0
0
0 8 . 064 20 . 16 0 8 . 064 20 . 16
(2)
k
(2)
矩 阵 位 移 法(例题)
结构刚度矩阵
168 34 . 667 8 K 10 57 . 794 14 . 425 202 . 667 8 10 57 . 794 14 . 425 57 . 794 8 . 064 121 . 358 20 . 16 7 . 212 20 . 16 7 . 212 67 . 2 60 . 106 14 . 425
结构力学基础矩阵位移法基本概念、计算程序和例题讲解

例形成图示刚架可动结点劲度矩阵,E,I ,A为常数。
解: 1.编号,如图(b) 2.确定单元杆端自由度序号。
3.计算 kmi 4.计算单元转换矩阵
5.形成单元在整体坐标系中的劲度矩阵
6.根据单元杆端自由度序号叠加
二、可动结点劲度矩阵性质
1.对称方阵
反力互等定理
2.非奇异矩阵 考虑了约束条件,排除了刚体位移
7.求杆端力Fmi
8.求支座反力 支座反力由下式
计算,得
9.内力图
例2 求图2-21(a)所示平面刚架的内力,已知各杆 I 0.005m4
A0.05m2,E2106kNmA2B杆、CD杆杆
返回
§9—3 可动结点劲度矩阵
一、形成可动结点劲度矩阵的步骤
步骤: 1.对结构进行结点编号、单元标号、自由度编号: 2.确定单元杆端自由度序号(考虑约束条件); 3.计算单元在局部坐标系中的劲度矩阵kmi 4.计算单元转换矩阵Ti 5.形成单元在整体坐标系中的劲度矩阵ki TiTkmiTi
6.按”对号入座”原则,将ki叠加到 k 中。
结构力学基础 矩阵位移法基本概念、计算程
序和例题讲解
§9-1 矩阵位移法基本概念 §9-2 单元劲度矩阵 §9-3 可动结点劲度矩阵 §9-4 可动结点等效荷载列阵 §9-5 单元杆端力和支座反力 §9-6 例题 §9-7 平面刚架计算程序
§9—1 矩阵位移法的基本概念
一、坐标系和符号规定 图示连续梁:
4.求 K
(1)计算机各单元的方向余弦和杆长:
(2)求 kmi
(3)求ki
单元(1):Cx=0 Cy=1
杆长:l 同理:
(4)求 按照“对号入座“原则,由ki形成k哪
例如: 同理:
结构力学 第九章 矩阵位移法-董 - 副本
Cx Cx
2
2
C xC y
C xC y 2 C y EA C xC y l 2 Cy
K
(2)
0 .75 0 .433 0 .75 0 .433
0 .433 0 .25 0 .433 0 .25
0 .75 0 .433 0 .75 0 .433
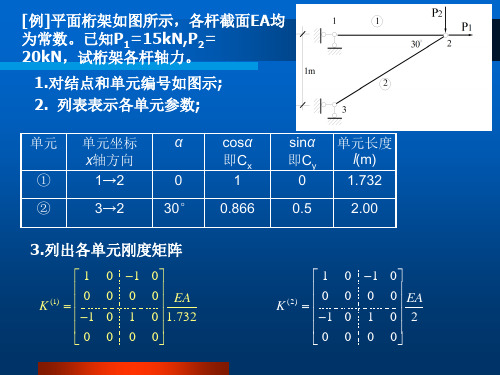
[例]
形成连续梁的整体刚度矩阵
(0) 1 (1)
2
(2)
3
(3)
4
(4)
5
(5)
i1
1 2
i2
3
i3
4
i4
5
i5
6
解:1)编号及建立坐标
2)单元刚度矩阵
(连续梁每个结点只一个位移)
0
4 i1 [k ] 2 i1
①
1
定位向量 ②
1
4 i2 [k ] 2 i2
2
定位向量
(2) 整体坐标系中的单元 刚 度矩阵 单元①: 0 , T I
0
k
(1)
k
1 0 0 0 0 0
(1)
90 0 , 单元②:
0 1 0 T 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0 0 1
e
k (6×6);
e
转换成整体坐标系 k
e
;
(5)把单元定位向量标在整体坐标系的单元刚度矩阵边上, 并划去已知支座位移等于零的行和列; (6)按照定位向量号,“对号入座”集合成整体刚度矩阵。
例 求整体刚度矩阵[K]。已知各杆刚度系数为 5 4 2 : EA 6.6 10 kN , EI 1.2 10 kN .m 。
结构力学教学第九章矩阵

F
(e) ix
EA ( e ) u jx =− L
i
x
F jx = −
j
(e )
(e)
EA ( e ) u jx L
θ
(e ) y F iy = 0
(e )
Mj =0
(e )
F jy = 0
uj
(e )
土木建筑工程学院
七、矩阵位移法
2 单元分析——杆端力与杆端位移的关系
Mi = −
F
(e) ix
(e)
P2 x P2 M
P3 x
(2)
P1 x
(1)
P1M
x
y
P1 y
P2 y
θ
土木建筑工程学院
七、矩阵位移法
1 矩阵位移法的基本思想
(1) F jy
(1) F jx
(1) F jM
(1)
(1) Fix
F1(1) y
(1) M1
(1) FiM
(1) P1 x = Fix
F1(1) x
P1 x
P1M
P1 y
Fix F iy FiM F jx F jy F jM
(e)
k11 k21 k31 = k41 k51 k61
k12 k22 k32 k42 k52 k62
k13 k23 k33 k43 k53 k63
F ix =
(e )
EA ( e ) u ix L
i
x
F jx = −
j
(e)
(e )
EA ( e ) uix L
θ
(e) y F iy = 0
(e )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第9章 矩阵位移法
习 题
9-1:请给图示结构编号(同时用先处理法和后处理法)及建立坐标。
题9-1图 9-2:求图示连续梁的整体刚度矩阵。
题9-2图
9-3:求图示刚架的整体刚度矩阵。
(c )
(e )
题9-3图
9-4:求图示组合结构的整体刚度矩阵。
题9-4图
9-5:求图示桁架结构的整体刚度矩阵,所有杆件的EA 均相同。
题9-5图
9-6:求图示排架结构的整体刚度矩阵。
题9-6图 9-7:求图示结构的等效结点荷载,请利用结构的对称性。
1kN/m
题9-7图
9-8:求图示结构的等效结点荷载,请利用结构的对称性。
题9-8图
9-9:求图示结构的等效结点荷载。
题9-9图
9-10:求出图示结构的荷载列阵。
题9-10图
9-11:求出图示结构的荷载列阵,请分别用先处理法和后处理法进行编号。
q
q
题9-11图
9-12:求图示结构的荷载列阵,考虑轴向变形。
题9-12图
9-13:求图示结构的荷载列阵。
题9-13图
9-14:图示连续梁中间支座发生了下向的移动a ,请求出其整体刚度方程。
题9-14图
10kN/m
q
9-15:请求出图示连续梁的整体刚度方程。
题9-15图
9-16:求图示连续梁的整体刚度矩阵。
题9-16图
9-17:图示结构温度发生了变化,请求出整体刚度方程。
杆件的EI 、EA 相同。
题9-17图
9-18:图示结构温度发生了变化,请求出整体刚度方程。
题9-18图
9-19:图示结构发生了支座移动,请画出结构的内力图。
00
题9-19图
9-20:已知图示梁B 点的B v 、B ϕ和C 点的C ϕ,请求出单元杆端力的列阵。
题9-20图
9-21:求题9-3图示刚架的整体刚度矩阵,忽略轴向变形。
9-22:求题9-10图示结构的整体刚度矩阵,用后处理法编号。
9-23:求出梁的整体刚度方程,弹簧的刚度系数为k 。
题9-23图
9-24:求出图示结构的整体刚度方程,忽略轴向变形,弹簧刚度系数为k 。
题9-24图
L。