控制工程基础实验——直流电机调速系统
实验十 直流电机调速实验
实验十直流电机调速实验一、实验目的:了解直流电机调速的原理与方法。
二、实验原理:(一)直流电机调速的方法有:1.调节电枢供电电压U改变电枢电压主要是从额定电压往下降低电枢电压,从电动机额定转速向下变速,属恒转矩调速方法。
对于要求在一定范围内无级平滑调速的系统来说,这种方法最好。
变化遇到的时间常数较小,能快速响应,但是需要大容量可调直流电源。
2.改变电动机主磁通改变磁通可以实现无级平滑调速,但只能减弱磁通进行调速(简称弱磁调速),从电机额定转速向上调速,属恒功率调速方法。
变化时间遇到的时间常数同变化遇到的相比要大得多,响应速度较慢,但所需电源容量小。
3.电枢回路串电阻调速电动机电枢回路外串电阻进行调速的方法,设备简单,操作方便。
但是只能进行有级调速,调速平滑性差,机械特性较软;空载时几乎没什么调速作用;还会在调速电阻上消耗大量电能。
(二)ETD 790 791系列装置是三相全数字式直流调速器,其工作电压最高可达500 Vac,工作电流可达4000A,频率范围为45-62赫兹,可用来控制电机的转速和转矩。
通过采用不同的外形尺寸,装置的电流最大可达到9000A。
调速器可分为两种类型:不可逆(791)和可逆(790)。
不可逆调速器仅用来控制一个方向的转速和转矩,而可逆调速器则可用来控制两个方向的速度和转矩。
当使用可逆调速器时,通过使用全控的反并联的可控硅模块,使电机电枢实现了真正四象限控制。
在制动期间,电机的能量可迅速反馈回电网。
调速器内部标配一个可调的励磁模块,用来调整电机励磁电流或者弱磁控制。
通过ETD 10.07.0 调控板上的一个32位的微处理器实现对调速器进行控制。
调控板同时可用于不可逆和可逆调速器。
微处理器的功能包括:主调节功能、与外部设备的接口功能、诊断功能。
这些功能可概括为:各种输入/输出信号,可进行自由组态;PID(三项控制器)速度环调节器;电流预控控制器,自动计算电机电阻,电感;辅助PID功能块,可自由配置;2层保护(报警与警告);控制面板可以自由配置参数,监视变量;通过RS232、RS422和RS485串行口实现的外部通信功能;内嵌CAN现场总线,且可通过不同的模块选择不同的现场总线。
控制工程基础实验——直流电机调速系统
实验二:直流电机调速系统【实验目的】1、熟悉直流伺服电机调速系统的组成,电动机、电流环和速度环的数学模型;2、了解速度环的建模方法,掌握速度环的设计和实验调试方法,从而从理论与实际的结合上掌握自动控制系统的设计与校正方法。
【实验原理】1、直流伺服电动机系统的工作原理直流电动机具有调速范围宽,起动、制动特性好等优点,至今由直流电动机组成的调速系统仍是变速传动的主要形式,在许多领域获得了十分广泛的应用。
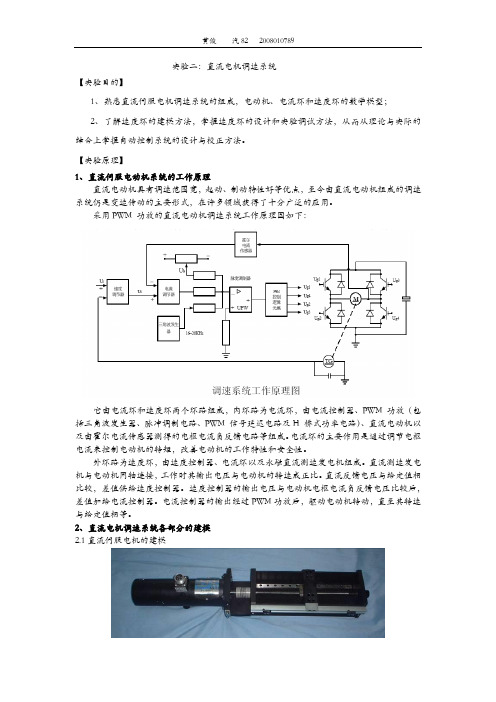
采用PWM 功放的直流电动机调速系统工作原理图如下:它由电流环和速度环两个环路组成,内环路为电流环,由电流控制器、PWM 功放(包括三角波发生器、脉冲调制电路、PWM 信号延迟电路及H 桥式功率电路)、直流电动机以及由霍尔电流传感器测得的电枢电流负反馈电路等组成。
电流环的主要作用是通过调节电枢电流来控制电动机的转矩,改善电动机的工作特性和安全性。
外环路为速度环,由速度控制器、电流环以及永磁直流测速发电机组成。
直流测速发电机与电动机同轴连接,工作时其输出电压与电动机的转速成正比。
直流反馈电压与给定值相比较,差值供给速度控制器。
速度控制器的输出电压与电动机电枢电流负反馈电压比较后,差值加给电流控制器。
电流控制器的输出经过PWM功放后,驱动电动机转动,直至其转速与给定值相等。
2、直流电机调速系统各部分的建模2.1直流伺服电机的建模电动机的微分方程如下:nC E dtdnJM M I C M E dtdI LRI U E fz e aM e aa a ==-=++=这样,电动机的传递函数为: ⎪⎪⎭⎫ ⎝⎛+-∙++=fz m m a E a m a m M J T s T T C s U s T s T T s n )(11)(2其中,RLT C C JR T a E M m ==,分别为电动机机电时间常数与电磁时间常数,对于本实验:外径Ф=70mm ,额定功率Pn=100W ,额定转速n n =1000rpm ,额定电压30V ,额定电流4.5A ,额定转矩1Nm ,峰值转矩8Nm ,电枢电阻1.7Ω,电枢电感3.7mH ,转动惯量2922Nms ,得ms RLT ms C C JR T a E M m 18.2,6.12====。
综合实验四直流电机调速

综合实验四直流电机调速一、实验目的1、掌握直流电机的驱动原理。
2、了解直流电机调速的方法。
二、实验内容1、实验原理图:2、实验内容(1)用0832 D/A转换电路后的输出经放大后驱动直流电机。
(2)编制程序改变0832输出经放大后的方波信号的占空比来控制电机转速。
本实验中D/A输出为双极性输出,因此电机可以正反向旋转。
3、连线方法(1)将D/A区0832的片选信号连到译码输出Y0上。
(2)0832的输出AOUT端连到DJ插孔。
(3)直流电机插头插到实验仪的DM插座上。
(4)D/A区0832的WR连到BUS3区XWR上。
(5)将+12V、-12V插孔用导线连到外置电源上。
如果电源内置,则+12V、-12V插孔电源已连好。
(6)D/A区0832的VREF连到W2的输出VREF插孔。
W2输入VIN连到+12V插孔,调节W2,使VREF为+5V。
(7)将DMTO区-5V插孔用导线连到外置电源上,如果电源内置,-5V线内部已连好。
三、程序程序清单:ORG 0C30HHA14S: MOV SP,#53HMOV DPTR,#8000HMOV A,#0FFHHA14S1: MOVX @DPTR,ALCALL DELAYHA14S2: DEC ALCALL DELAYMOVX @DPTR,ACJNE A,#00H,HA14S2HA14S3: INC AMOVX @DPTR,ALCALL DELAYCJNE A,#0FFH,HA14S3SJMP HA14S1DELAY: MOV R7,#0FFHDELAY1: MOV R6,#80HDELAY2: DJNZ R6,DELAY2DJNZ R7,DELAY1RETEND四、实验步骤1、确认连线正确性。
2、在“P.....”状态下,从起始地址0C30H开始连续运行程序。
3、观察直流电机的转速。
lab电机实验 直流电动机V-M调速系统
À 九、实验报告页见最后。实验完成后由老师签字。报
告完成后可撕下该页上交。
实验报告记录: 电压V 电流A 转矩Nm 转速r/min 功率kW
4.转速、电流双闭环直流电动机V-M调速系统静 特性的测试。
①在停车状态下,把可控整流装置给定电位器逆时针转到0;把控制 面板上的切换开关拨至“恒流”。 ②整定数字闭环调节器的参数:键盘(或电位器)给定,转速给定 1500, P参数=1,I参数=12,其余自定。 ③按数字闭环调节器的“运行”键,电机将起动并最终空载稳定运行, 读取并记录此时的电压、电流、转速、转矩、功率,逐步增加负 载至额定负载,在不同的负载下读取并记录电压、电流、转速、 转矩、功率;实验点数不少于6点(含空载)。测得给定 1500r/min时的闭环系统静特性。 ④改变数字闭环调节器的给定转速参数值,重复上面的步骤,分别测 得给定在1200,900时的闭环系统静特性。
五、直流斩波稳压电源简要操作说明
斩波电源有两路输出电压可调的直流输出: ① 0~250VDC,2A,用于 供给直流电动机的励磁; ② 0~100VDC,4A,用于供给 同步电机的励磁。
设备上电前先把两个电位器旋到输出最小位置(逆时针方向旋转),上电 后再根据需要调节电位器。仪器上可分别读到输出的电压、电流值。
八、实验操作及实验说明
1. 接线、查线。
• • • • 认识此次实验所使用的仪器、设备, 在实验报告的相应栏目中记录仪器设备及电机的型号及主要额ห้องสมุดไป่ตู้参数。 按实验线路图完成接线。 由老师查线确认接线正确后才可继续往下进行。
实验报告(一)
1.直流电动机铭牌值: 额定电压 V 额定功率 kW 额定电流 A 额定转速 r/min 额定励磁电流 A
直流电机的调速系统

毕业论文(设计)直流电机的调速系统摘要直流电动机具有良好的起制动性能,易于在广泛范围内平滑调速,在需要高性能可控电力拖动的领域中得到了广泛的应用。
直流拖动控制系统在理论上和实践上都比较成熟,它是交流拖动控制系统的基础,所以首先应该掌握直流系统。
从生产机械要求控制的物理量来看,电力拖动自动控制系统有调速系统,位置随动系统,张力控制系统,多电动机同步控制系统等多种类型,而各种系统往往都是通过控制转速来实现的,因而调速系统是最基本的拖动控制系统。
在许多生产机械中,常要求电动机既能正反转,又能快速制动,需要四象限运行的特性,此时必须采用可逆调速系统。
本文介绍了逻辑无环流可逆直流调速系统的基本原理及其构成,并对逻辑控制器进行了详细介绍。
运用了一种基于Matlab的Simulink和Power System工具箱、面向系统电气原理结构图的仿真新方法,实现了转速电流双闭环逻辑无环流直流可逆调速系统的建模与仿真。
重点介绍了无环流逻辑切换装置及其建模,给出了直流可逆调速系统的仿真模型和仿真结果,实验结果表明仿真结果非常接近理论波形,可信度较高。
关键词:逻辑无环流可逆调速;直流电机;Matlab仿真AbstractThe DC motor has a good starting and braking performance, easy to smooth the governor, in a broad range has been widely applied in the field of high-performance controllable electric drive. DC drive control systems in the theory and practice more mature, it is the foundation of the AC Drive control system should first master the DC system.The control of physical quantities from the production machinery, electric drive automatic control system has a speed control system, position servo system, tension control system, multi-motor synchronous control system and other types, a variety of systems areoften by controlling the speed to achieve, and thus the speed control system is the most basic drag control systems. In many production machinery, and often require the motor not only rotating, but also rapid braking, you need four-quadrant operation characteristics, must be reversible speed control system.This article describes the basic principle of logic without circulation reversible DC drive system and its components, and details of the logic controller。
直流电机调速部分实验说明
直流电机调速实训部分实验说明实验1、继电保护电路工作原理分析一、课堂组织1、检查学生出勤情况2、检查学生劳保用品穿戴情况二、授课内容(一)组成直流调速部分包括主回路三相全控桥、继电保护电路、电源电路、调节及保护电路、触发电路、隔离保护电路等组成。
(二)用途用于直流电动机降低电枢电压调速或转速电流双闭环调速,也可作为大功率直流电源使用。
(三)特点1、直流电动机改变电枢电压调速的特点改变电动机的电枢电压,电动机机械特性的硬度变化不大,转速稳定性好,可实现无级调速。
2、本系统特点电压单闭环,带电流截止负反馈或转速电流双闭环,输出电压连续可调,闭环机械特性硬度高,具有过载及主电路缺相保护,使电动机具有挖土机特性。
(四)继电保护电路工作原理1、继电保护原理图N控制电路给定回路故障指示H12、工作原理分析启动:⑴闭合SA1,KM2线圈得电,主触头闭合,将U、V、W和36、37、38接通,使同步及电源变压器得电,控制电路开始工作。
36#线得电和KM2辅助常开触头的闭合,为主电路给定回路的接通做好准备。
⑵闭合SA2,KM1线圈得电。
主触点接通三相电源与主变压器得电。
KM1的辅助常开触点闭合。
1 / 46①使控制电路接触器KM2线圈始终接通,保证主电路得电时,控制电路不能被切断。
②为给定回路的接通做好准备。
⑶按下SB2,给定回路接通,KA1得电自锁,进行完⑴、⑵、⑶后,启动完成。
停止:⑴按下SB1,切断给定回路。
⑵断开SA2,切断主电路。
⑶断开SA1,切断控制电路。
3、给定回路原理图(+15v)(-15v)KA11闭合后,+15v接通,KA11线圈不得电时,-15v接通。
(五)在继电保护电路中的一些问题1、与SA1并联的KM1辅助常开触点的作用是什么?当KM2得电后,KM1才能得电。
依靠KM1线圈前的KM2常开完成顺序控制。
但一旦KM1闭合后,KM2将无法断开,是由并联在SA1上的KM1触头实现的,其作用是保证控制电路得电后,主电路才能得电,而主电路没有断电时,控制电路不能断电,主电路得电而控制电路不工作,容易出现事故。
直流电动机调速实验报告

直流电动机调速实验报告摘要:本次实验通过对直流电动机调速系统的设计与搭建,探索了采用不同控制方法对电动机进行调速的效果与特性。
通过实验验证,得出了电流调速和电压调速方法在直流电动机调速中的应用特点和优缺点。
一、引言直流电动机是一种广泛应用于工业生产中的电动机,其具有调速范围广、响应快、工作可靠等特点。
直流电动机调速是工业自动控制系统中的常见问题,其调速性能直接影响到生产设备的工作效率和质量。
因此,对直流电动机调速系统进行研究与实验具有重要的意义。
二、实验目的1.熟悉直流电动机的基本结构和工作原理;2.掌握电流调速和电压调速在直流电动机调速中的应用特点;3.进行实验验证,分析电流调速和电压调速的优缺点。
三、实验原理直流电动机的调速方法主要包括电流调速和电压调速两种。
电流调速通过改变电机的输入电流来调节电机的转速,而电压调速则是通过改变电机的输入电压来调节电机的转速。
电流调速适用于负载变化较大的场合,而电压调速适用于负载稳定的场合。
四、实验设备与材料1.直流电动机;2.调速器;3.控制器;4.多用表;5.实验电路板等。
五、实验步骤1.搭建电流调速实验电路,连接电动机、调速器和控制器;2.按照实验要求调节控制器的参数;3.打开电源,设置控制器的输入信号;4.在实验过程中记录电机的转速、电流和输出功率等参数;5.将实验数据整理并进行分析。
六、实验结果与讨论根据实验数据,绘制了电流调速和电压调速的转速-负载特性曲线。
分析实验数据发现,电流调速方法在负载变化较大时,保持了较稳定的转速,且响应速度较快。
而电压调速方法在负载较稳定时能够保持较好的速度稳定性,但对于负载变化较大的情况,则转速会有较大波动。
七、结论通过本次实验研究发现,电流调速和电压调速方法在直流电动机调速中具有不同的应用特点和优缺点。
电流调速适用于负载变化较大的场合,能够保持转速的稳定性和响应速度;而电压调速适用于负载较稳定的场合,能够保持较好的转速稳定性。
直流自动调速系统实验
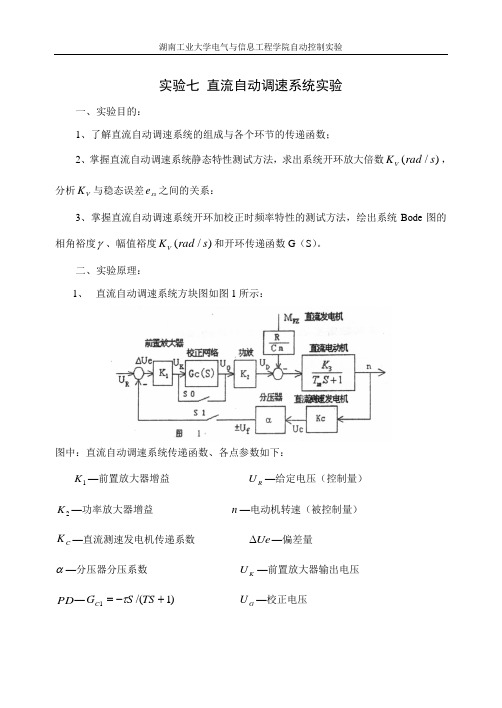
实验七 直流自动调速系统实验一、实验目的:1、了解直流自动调速系统的组成与各个环节的传递函数;2、掌握直流自动调速系统静态特性测试方法,求出系统开环放大倍数)/(s rad K V ,分析V K 与稳态误差ss e 之间的关系:3、掌握直流自动调速系统开环加校正时频率特性的测试方法,绘出系统Bode 图的相角裕度γ、幅值裕度)/(s rad K V 和开环传递函数G (S )。
二、实验原理:1、 直流自动调速系统方块图如图1所示:图中:直流自动调速系统传递函数、各点参数如下:1K —前置放大器增益 R U —给定电压(控制量)2K —功率放大器增益n —电动机转速(被控制量)C K —直流测速发电机传递系数Ue ∆—偏差量α—分压器分压系数K U —前置放大器输出电压PD —)1/(1+-=TS S G C τG U —校正电压PI —BTS S K G C /)1(42τ+-= D U —直流电动机电枢电压PID —)()()(21S G S G S G C C C +=FZ M —干扰信号(负载转矩)13+S T K m —直流电动机传递函数C U —反馈电压R —电枢回路等效电阻f U —反馈电压Cm —电动机的转矩常数 2.直流电动调速控制系统抗干扰的物理过程: 直流电动机的机械特性 Φ-=e aa D C R I U n闭环控制系统,抗干扰的顺序过程是:在干扰信号FZ M 的作用下(FZ M 的数值下降),使系统直流电动机的转速n 上升、测速发电机电压C U 上升、负反馈电压f U 上升、在给定电压R U 不变的情况下偏差电压)(Ue U U Ue f R ∆=-∆下降。
由直流电动机机械特性的公式知道,在其它参数不变的条件下,加在电枢两端的电压D U 下降,使直流电动机的转速下降,闭环控制系统靠这样的顺序过程实现自动调速的。
同理得出结论,闭环系统能够有效地抑制一切被包围在反馈环内的扰动作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二:直流电机调速系统【实验目的】1、熟悉直流伺服电机调速系统的组成,电动机、电流环和速度环的数学模型;2、了解速度环的建模方法,掌握速度环的设计和实验调试方法,从而从理论与实际的结合上掌握自动控制系统的设计与校正方法。
【实验原理】1、直流伺服电动机系统的工作原理直流电动机具有调速范围宽,起动、制动特性好等优点,至今由直流电动机组成的调速系统仍是变速传动的主要形式,在许多领域获得了十分广泛的应用。
采用PWM 功放的直流电动机调速系统工作原理图如下:它由电流环和速度环两个环路组成,内环路为电流环,由电流控制器、PWM 功放(包括三角波发生器、脉冲调制电路、PWM 信号延迟电路及H 桥式功率电路)、直流电动机以及由霍尔电流传感器测得的电枢电流负反馈电路等组成。
电流环的主要作用是通过调节电枢电流来控制电动机的转矩,改善电动机的工作特性和安全性。
外环路为速度环,由速度控制器、电流环以及永磁直流测速发电机组成。
直流测速发电机与电动机同轴连接,工作时其输出电压与电动机的转速成正比。
直流反馈电压与给定值相比较,差值供给速度控制器。
速度控制器的输出电压与电动机电枢电流负反馈电压比较后,差值加给电流控制器。
电流控制器的输出经过PWM功放后,驱动电动机转动,直至其转速与给定值相等。
2、直流电机调速系统各部分的建模2.1直流伺服电机的建模电动机的微分方程如下:nC E dtdnJM M I C M E dtdI LRI U E fz e aM e aa a ==-=++=这样,电动机的传递函数为: ⎪⎪⎭⎫ ⎝⎛+-∙++=fz m m a E a m a m M J T s T T C s U s T s T T s n )(11)(2其中,RLT C C JR T a E M m ==,分别为电动机机电时间常数与电磁时间常数,对于本实验:外径Ф=70mm ,额定功率Pn=100W ,额定转速n n =1000rpm ,额定电压30V ,额定电流4.5A ,额定转矩1Nm ,峰值转矩8Nm ,电枢电阻1.7Ω,电枢电感3.7mH ,转动惯量2922Nms ,得ms RLT ms C C JR T a E M m 18.2,6.12====。
在常值定电压输入和固定负载力矩作用下,其稳态转速为: JTM C U n m fz E a -=(1)如上图所示:① 如果负载力矩fz M 一定,转速与控制电压a U 的关系成为直流电机的控制特性,由上图以及(1)式可知,电动机转速与控制电压成正比,但随着负载的增加,启动电压会增加,使控制特性变成非线性,这是应该避免的。
② 如果控制电压a U 一定,转速与负载力矩fz M 的关系称为直流电机的机械特性。
由上图以及(1)式可知,电动机转速随负载力矩的增加而降低,甚至会堵转。
所以单纯靠直流电机来调速与稳速是不行的,必须设计一个能够调速的反馈控制系统,才能满足使用要求。
2.2霍尔电流传感器本实验中,它的传递函数为:M M R I U ⨯=1001.02.3电流环的建模采用高精度运算放大器组成PI 电流调节器,其输出送给脉宽调制器的输入,其电路原理图如下所示。
R 2C 2电流调节器电路原理图运算放大器的反馈回路中的电阻2R 和2C 组成比例积分校正,其传递函数为:SC R S C R S G i 212221)(+=图中i U 为电流环的输入,接在速度调节器的输出,M U 为霍尔电流传感器采样电阻MR 上的电压,由于M R 为1ΩK ,远小于1R 。
另外在两个1R 电阻之间加一个滤波电容1C ,滤波时间常数11(/2)R C τ=⋅。
故电流环的传递函数图下图所示:将交叉点前移,并且为了保证电路环的稳定性与快速性,令:22C R T a =,转变为:不妨先分析内环:内环是一型系统,静态速度误差系数为: aM PWM V R R K C R K 10002122∙∙=设计电流环的参数,让s rad K c V /6280==ω,鉴于c C R ωτ5.05.0111<=是个小参数,初步计算时可以忽略不计,这样,从电流调节器输入到电枢电流输出的传递函数为:1/11000)()(+∙=V M a a K s R s U s I 选择采样电阻Ω=2000M R ,则:115.01/11000)()(+⨯=+∙=s K s R s U s I a V M a a τ 由于ms a 16.0=τ,是电流环的等效时间常数,其频带在1KHz 左右,在讨论速度环时,可以把电流环等效为比例环节,其传递函数为:V A K VA /5.0=采用电流环是因为电机的力矩与其电枢电流成正比,控制电机的电流就等于控制了电机的力矩,即控制运动对象的加速度。
有些系统可能工作在力矩状态,例如力矩平衡系统,电动扳手等。
在调速系统中,启动和制动往往要求恒加速度,其速度波形则为梯形波。
2.4速度环的分析与设计接线图如下所示:速度环主要由电流环、测速发电机、速度调节器等电路组成。
测速发电机同轴安装在电机轴上,其定子是永磁的,故发电机的电压为: n K U f c ∙= 在反馈回路中加入阻容网络,组成低通滤波器。
滤波的时间常数为:ms C R T 3.45.0332== 速度调节是一个有源PI 校正装臵,如图所示:443411()n n n s R C s G s R C s T sτ++==式中,44n R C τ=,34n T R C =双环高速系统方框图如下所示。
其中,当)(nc s G 为比例-积分(PI )调节器时,其传递函数为sT s s G n n nc 1)(+=τ当)(nc s G 为比例(P )调节器时,其传递函数为n nc )(K s G =由于电流环的频带接近1kHz ,而速度环的通频带要小很多倍,故可认为电流环是一个比例环节。
另外,由于电流环本身是一阶无差系统,故电机的反电势可以忽略不计 当速度控制器为比例控制器时:所以原速度环方块图可以简化如下:这个系统是一阶无差系统,其速度品质系数为:aC M P V JR K C K K βα∙=21 如果忽略2T 这个小量,则: ⎥⎥⎦⎤⎢⎢⎣⎡-+∙=fz M p avi V c M C K R s U K s K s n αβ)(1/15.01)( (2)如果设臵参数使得:min)/1000/(245.0,100r V K K c c v ===βω则))/((101.036.41/15.01)()(V s rad s K s K s U s n V c vi ∙+=+∙=β由(2)式可知,当P K 较小时,且vi U 也较小时,用手就可以捏住电机轴,使其停转。
当速度控制器为PI 控制器时:所以原速度环方块图可以简化如下:这个系统是二型系统,其加速度品质系数为:aa C M a T JR K C K βα∙=21 如果忽略2T 这个小量,则电动机转速的传递函数为:22/)1(1/)1(5.01)()(ss K s s K K s U s n n a n a c vi +++∙=ττβ 由于fz M 作用在PI 控制器之后,由于作用点前有积分环节于是其稳态误差为0,、因此,在负载力矩作用下,其同在会下降,但稳态速度仍将达到指定值。
因此负载变化较大的调速系统一般采用PI 控制器。
【实验设备】1. 直流伺服电动机-测试发动机机组 型号:70SZD01CF24MB1)直流伺服电动机外径Ф=70mm,额定功率Pn=100W,额定转速n=1000rpm,额定电压30V,额定电流n4.5A,额定转矩1Nm,峰值转矩8Nm,电枢电阻1.7Ω,电枢电感3.7mH,转动惯量2922Nms,机电时间常数12.6ms.2)测速发电机外径Ф70mm,斜率为24V/1000rpm,允许带10KΩ负载,转动惯量为1002Nms,与电动机同轴安装。
3)PMW功率放大器实验所用的PWM 功率放大器是桂林星辰电力电子公司的SC5HC601 型,它输出最大电流5A,输出电压最大60V。
放大器频带接近1000Hz,增益为0.5A/V。
如图所示。
4)光电编码器500脉冲/每转,电源5V,输出TTL电平信号,分A、B、Z三种信号。
其中A,B两组信号相差90度相位,A超前B表示正转,B超前A表示反转,Z是每转发出一个零位信号。
2.单轴运动工作台±。
为防止冲过行程,在滚动丝杠传动,螺距2mm,整个行程200mm,或100mm95~98mm±处加上行程保护开关(使用常闭触点)。
3.运动控制系统试验箱4.TEK1002数字存储示波器5.电工万用表【实验内容】速度环测试步骤:接线图:(1)掌握速度反馈极性的判断方法。
一般用开环判断,当输入为正电压,反馈电压为负。
当正反馈时,输入电压趋于0时,电动机仍然高速转动。
如果正反馈,把测速机输出的两端反过来接47K 电位计上即为负反馈。
(2)系统暂时按PI 校正接好,建议C4 用0.1μF 。
当输入电压为8V 时,调节测速反馈电位计的位臵,(即调整K β)顺时针加大,一般示值在0.81左右,使得测速机电压为24V 。
(3)保持K β不变,然后把电容C4短路,调节R4为最小,调节输入电压UVi ,当低速时,可以用手捏住电机轴,说明系统带负载能力差,刚度低。
如果把电容C4接上,则就捏不住了,说明在力矩干扰下,电机稳态速度不变,刚度大为提高。
(4)保持K β不变,把C4短路,即采用比例调节器,分别测试R4最小和最大时调速系统的动态特性,方法是利用输入端的开关,在输入端分别加入〒1V 或2V 电压,用TDS1002数字存储示波器测试速度环反馈电压UVFX 掌的波形,记录其过渡过程指标(超调量与调整时间,峰值时间,振荡周期)。
并记录对应的参数,与仿真结果对比。
分析为什么输入电压大(例如3-4V )时,系统调整时间会加长的原因。
再选择合适的R4值,使得时域响应波形满意,记下此时的R4,算出KP 。
(5)分别测试R4最小和最大时调速系统的静态传递特性,即记录输入电压为-8V 到+8V ,步长为1V 时测速机的电压,画出静特性曲线便可分析其静态特性。
(6)采用PI 调节器,电容C4分别为0.1和0.47μF ,调节R4,得到你认为满意的几组过渡过程,并用示波器记录。
注意R4时要断开电源后用万用表测试。
(7)测试采用PI 调节器时速度环的静态特性曲线。
系统是否存在死区?了解调速系统刚度与系统参数和结构的关系。
采用比例调节器,且R4为最小(100K ),调节输入电压,使电机转速很低,可用手使电机停转。
而采用PI 调节器,同是电机转速很低,用手不能使电机停转。
试从理论上分析之。
(8)*(选做)测试速度环的速度品质系数,自己设计实验方法。