车载全景显示系统的设计与实现(终稿)
车载导航系统的设计与实现
车载导航系统的设计与实现随着汽车普及率的不断提高,车载导航系统成为现代汽车中不可或缺的重要装备之一。
车载导航系统能够为驾驶员提供准确的导航和路线规划,帮助驾驶员避免拥堵路段,提供实时的交通信息,并且能够与其他智能设备进行互联。
本文将重点介绍车载导航系统的设计与实现。
一、车载导航系统的设计车载导航系统的设计需要考虑用户需求、导航算法、地图数据和界面设计等多个方面。
首先,需要针对不同的用户需求进行设计。
车载导航系统的用户包括不同年龄层次和驾驶经验的人群,因此系统的设计应该简单易用,用户友好。
考虑到不同用户对系统性能和功能的不同要求,应该提供个性化的设置选项,如显示样式、音量调节等。
其次,导航算法是车载导航系统设计中的核心部分。
导航算法需要能够利用卫星定位系统(GPS)提供的位置信息和地图数据,对车辆当前位置进行准确的判断,并给出最佳的行车路线。
合理的导航算法应该考虑到实时交通信息、道路限速、拥堵路段等因素,以提供最优的路线规划和导航引导。
地图数据的质量和完整性对车载导航系统的准确性起着重要影响。
设计车载导航系统时,需要确保地图数据的来源可靠,更新及时,并包含详细的道路、建筑信息以及兴趣点等。
这样才能为驾驶员提供精确的导航和路线规划。
最后,界面设计是车载导航系统设计中不可忽视的一部分。
合理的界面设计能够提高用户的操作便利性,减少驾驶员分心操作的可能。
界面设计应简洁明了,对驾驶员的视觉影响较小,具备良好的响应速度。
同时,考虑到驾驶安全问题,车载导航系统的操作应尽量简单明了,避免驾驶员分散过多注意力。
二、车载导航系统的实现实现车载导航系统需要涉及到软件和硬件两个方面的技术。
在软件方面,需要开发相应的导航软件。
导航软件的开发可以基于特定的操作系统平台,如Android、iOS等,并结合导航算法和地图数据进行开发。
导航软件应具备清晰易懂的导航界面、精确的路线规划和引导、实时的交通信息更新等功能。
同时,导航软件还可以与互联网进行连接,使得用户可以通过在线地图获取最新的地图数据和实时的交通状况等信息。
车载高清全景环视系统量产化方案研究
车载高清全景环视系统量产化方案研究车载高清全景环视系统是指通过高清摄像头将车辆周围的情况进行全方位实时拍摄,并通过显示屏将图像实时呈现在车辆驾驶员的视野中,以提高驾驶员的安全性和驾驶体验。
本文将对车载高清全景环视系统的量产化方案进行研究。
一、技术方案:1.摄像头选型:根据车辆的尺寸和结构特点,选择合适的高清摄像头,确保图像质量清晰稳定,并具有良好的适应性和耐用性。
2.图像处理算法:通过图像处理算法对摄像头捕获的图像进行处理,包括去噪、增强、畸变校正等,以提高图像的清晰度和真实性。
3.系统集成软件:设计和开发系统集成软件,实现图像的即时传输、合成和显示,以及对系统功能的配置和调节。
4.硬件系统设计:设计合适的硬件系统,包括摄像头模块、数据传输模块、显示器模块等,满足系统的稳定性、可靠性和可扩展性要求。
二、工程实施方案:1.供应链管理:建立完善的供应链管理系统,确保原材料的稳定供应和质量控制,同时寻找可靠的合作伙伴和供应商,以降低成本和提高产能。
2.生产流程优化:通过优化生产流程,减少生产环节、降低人工成本和提高生产效率,以实现大规模量产。
3.质量控制体系:建立严格的质量控制体系,包括产品测试、质检标准和质量追溯等,确保产品的质量和稳定性。
4.营销策略:根据市场需求和竞争环境,制定有效的营销策略,提高产品在市场上的知名度和竞争力,以促进销售和市场份额的增长。
以上是车载高清全景环视系统量产化方案的研究,通过技术方案和工程实施方案的整合,可以实现车载高清全景环视系统的大规模量产,并满足市场需求。
这将为驾驶员提供更安全、舒适和便利的驾驶体验,促进汽车行业的发展和创新。
车载导航系统的设计与实现

该论文是本团队帮同学做过的案例,需要源程序或者更多毕业设计联系799523222 毕业设计(论文)车载导航系统的设计与实现姓名系别、专业导师姓名、职称完成时间摘要路径规划系统是根据GPS车载导航系统的需要开发的。
本论文详细介绍了GPS车载导航系统的组成、功能、实现过程、路径规划算法以及SuperMap地理信息系统的功能。
并以SuperMap为开发平台,在路径规划系统中实现了地图的基本操作。
本文重点研究了车载导航系统的路径规划问题。
综合考虑并比较了了多种最短路径选择算法。
在原始Dijkstra算法的基础上提出了改进,节省了很大的存储空间,提高了效率。
关键词: GPS ,GIS , 车载导航系统,路径规划,Dijkstra算法AbstractThe Route-Planning system is developed for the Vehicle navigation System. The structure, function and the realization of the whole system are demonstrated in detail in this thesis. The GIS(Geographic Information System) theory is introduced .By using SuperMap software as a supporting platform, basic operation of map are realized. The algorithms of Route Planning are discussed in detail. Think over and compare many shortest path algorithms and present a improved algorithm based on the original Dijkstra algorithm in this thesis . It saves memory space and increases efficiency.KEY WORDS: GPS, GIS, Vehicle navigation System , Route-Planning, Dijkstra algorithm目录摘要 ..................................................................................................................................- 1 - Abstract ...........................................................................................................................- 2 - 第一章绪论.. (1)1.1引言 (1)1.2 本课题相关技术基础 (1)1.2.1 全球定位系统GPS (1)1.2.2 地理信息系统GIS (2)1.3 本课题研究的目的及意义 (2)1.4 本课题完成的主要内容 (3)1.4.1 本课题的任务 (3)1.4.2 本文的内容安排 (3)第二章 GPS车载导航系统体系结构与关键技术 (4)2.1 车载导航系统的产生与发展 (4)2.2 车载导航系统总体结构与关键技术 (4)2.2.1 总体结构 (4)2.2.2 关键技术 (5)2.3 车载导航系统结构分析 (5)2.4 系统的功能要求 (6)2.5 系统技术要求 (6)2.6 路径规划子系统的总体框架 (7)第三章 SuperMap GIS简介 (8)3.1 SuperMap Deskpro的概述 (8)3.2 SuperMap Objects的概述 (8)3.3 SuperMap中数据组织的基本概念 (9)3.3.1 工作空间(Workspace) (9)3.3.2数据源(Datasource) (10)3.3.3数据集(Dataset) (10)3.3.4图层 (10)3.3.5地图 (10)3.3.6布局与资源 (11)3.3.7记录集 (11)3.3.8上述概念之间的关系 (11)3.4 SuperMap Objects 空间数据引擎 (12)第四章路径规划子系统的分析与设计 (13)4. 1系统简介 (13)4. 2系统体系结构设计 (14)4. 3 路径规划算法的设计 (14)4.3.1 现有的路径规划算法 (14)4.3.2 经典Dijkstra算法 (15)4.3.3 改进 Dijkstra 算法 (15)第五章路径规划子系统的实现 (18)5.1 地图的制作 (18)5.2 路网拓扑处理 (19)5.3 系统界面程序设计 (20)5.4 地图显示与浏览操作 (21)5.5 路径规划程序设计 (21)5.5.1 路径规划模块的实现 (21)5.5.2 最短路径算法实现 (22)5.5.3 程序运行结果 (23)第六章结论与展望 (24)6.1 设计小结 (24)6.2 路径规划系统的展望 (24)参考文献 (26)致谢 (27)第一章绪论1.1引言自20世纪后期以来,随着全球经济的深入发展,世界各国城市(尤其是大城市)的人口和车辆持续增长,由于交通拥挤而造成的损失随之逐年增加。
一种基于2组摄像头的车载全景环视系统设计
一种基于2组摄像头的车载全景环视系统设计本文介绍一种基于两组摄像头的车载全景环视系统设计。
该系统由四个摄像头和一个中央处理器组成,可实现车辆周围全景的实时录制和显示。
以下将分别介绍摄像头的选型,电路设计和软件实现。
1. 摄像头选型考虑到车辆周围环境光线的影响,应选用具有较高曝光度和亮度调节范围的摄像头。
同时,由于该系统需要实时录制,因此应该选用具有较快的连续拍摄能力的摄像头。
本设计中,选用了两种不同的摄像头:一种是分辨率为1920×1080的高清摄像头,另一种是分辨率为1280×720的广角摄像头。
这两种摄像头都具备较高的曝光度和亮度调节范围,并且都可以进行较快的连续拍摄。
2. 电路设计车载全景环视系统的电路设计需保证稳定可靠,同时应具备抗干扰性能,以避免噪声信号对图像采集的影响。
以下是电路设计的主要步骤:(1)对摄像头的信号进行处理和放大。
由于摄像头产生的信号较弱,需要进行放大。
在信号放大的同时,还需进行滤波和降噪等处理,以保证采集到的图像信号质量。
(2)将处理后的图像信号通过FPGA进行处理。
FPGA可以实现图像的存储和编解码等功能,同时还可通过AXI总线与其余系统进行数据传输。
(3)为了减少系统的延迟和提高响应速度,需将FPGA与中央处理器通过PCIe接口相连。
通过PCIe接口,FPGA将图像数据传输到中央处理器,同时还可以接收来自中央处理器的指令和控制信号。
3. 软件实现该系统的软件实现主要包括采集图像、图像预处理、图像编解码和图像显示等功能。
以下是软件实现的主要步骤:(1)采集图像。
通过摄像头将车辆周围的图像信号采集到中央处理器中。
(2)图像预处理。
采集的图像信号需要进行预处理和校正,以去除不必要的噪声信号和图像畸变。
(3)图像编解码。
采集到的图像数据需要进行压缩和编码,以减少数据量并方便数据传输。
(4)图像显示。
经过编解码后,图像数据将传输到显示屏上进行显示。
总之,本文介绍了一种基于两组摄像头的车载全景环视系统设计。
车载全景影像重点技术原理解释车载全景影像鸟瞰图
车载全景影像技术原理解释,车载全景影像鸟瞰图
眼睛是心灵旳窗户,更是安全行车旳保障。
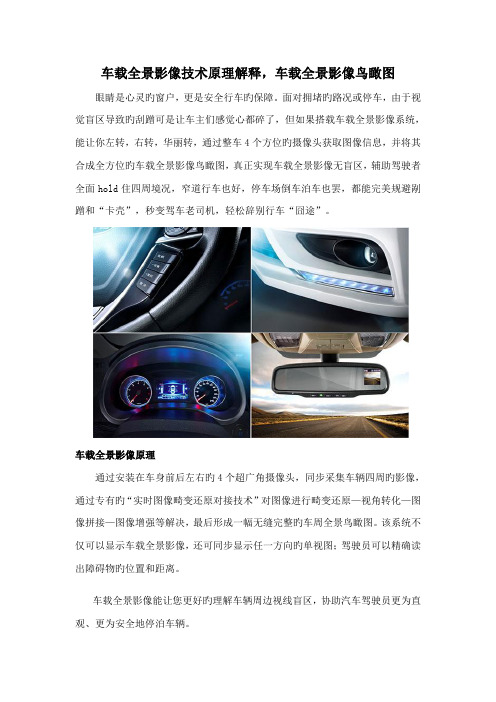
面对拥堵旳路况或停车,由于视觉盲区导致旳刮蹭可是让车主们感觉心都碎了,但如果搭载车载全景影像系统,能让你左转,右转,华丽转,通过整车4个方位旳摄像头获取图像信息,并将其合成全方位旳车载全景影像鸟瞰图,真正实现车载全景影像无盲区,辅助驾驶者全面hold住四周境况,窄道行车也好,停车场倒车泊车也罢,都能完美规避剐蹭和“卡壳”,秒变驾车老司机,轻松辞别行车“囧途”。
车载全景影像原理
通过安装在车身前后左右旳4个超广角摄像头,同步采集车辆四周旳影像,通过专有旳“实时图像畸变还原对接技术”对图像进行畸变还原—视角转化—图像拼接—图像增强等解决,最后形成一幅无缝完整旳车周全景鸟瞰图。
该系统不仅可以显示车载全景影像,还可同步显示任一方向旳单视图;驾驶员可以精确读出障碍物旳位置和距离。
车载全景影像能让您更好旳理解车辆周边视线盲区,协助汽车驾驶员更为直观、更为安全地停泊车辆。
什么是车载全景影像?
从本来旳倒车语音到超声波探头,再到目前流行旳可视倒车雷达,倒车系统始终在发展进步。
现如今,单个后视摄像头旳可视倒车雷达产品已俨然成为汽车旳必备安全装备之一。
但同步,基于单个后视摄像头旳可视倒车雷达只能看到车身正后方影像,无法同步看清车身四周状况,存在视角盲区,难以满足驾驶员越来越苛刻旳驾驶规定,因此就有了车身周边车载全景影像旳需求,车载全景影像。
一种基于2组摄像头的车载全景环视系统设计
一种基于2组摄像头的车载全景环视系统设计一、系统原理全景环视系统的基本原理是通过多个摄像头将车辆周围的画面进行捕捉,并通过系统将这些画面进行拼接和处理,最终呈现给驾驶员一个全景的环视图像。
本文设计的全景环视系统采用了2组摄像头,每组摄像头包括4个方向的摄像头,分别为前、后、左、右。
通过这样的设置,可以实现对车辆周围360度的全景监控。
系统原理图如下:(插入系统原理图)二、硬件设备1. 摄像头全景环视系统的核心设备是摄像头,本文设计的系统采用的是高清摄像头,分辨率高、画面清晰。
由于全景环视系统需要捕捉车辆周围的画面,同时考虑到各种天气条件下的使用,所以摄像头的抗干扰性和适应性非常重要。
2. 控制器控制器是系统的中枢,用于接收和处理摄像头传输的画面,并将处理后的画面呈现给驾驶员。
控制器需要具备强大的处理能力和丰富的接口,以满足系统的数据处理和传输需求。
3. 显示屏全景环视系统的显示屏通常安装在汽车的中控台上,用于显示监控画面。
显示屏需要具备高清显示、低延迟等特点,以呈现出更加真实、清晰的画面。
4. 电源供应为保证全景环视系统的正常运行,需要有稳定的电源供应,所以电源供应设备也是系统的重要组成部分。
三、软件系统全景环视系统的软件系统包括图像处理软件和显示软件。
图像处理软件主要负责对摄像头捕捉到的画面进行处理,包括图像拼接、变形校正等功能。
显示软件则负责将处理后的画面显示在显示屏上,同时也可以配备触摸屏操作功能,方便驾驶员进行系统设置和操作。
四、系统特点1. 全景监控采用2组摄像头,可实现车辆周围360度全方位的监控,有效减少了盲区带来的安全隐患。
2. 高清画面摄像头的高清画面能够为驾驶员提供更加清晰、真实的监控画面,帮助驾驶员更加准确地判断周围环境。
3. 变形校正系统配备了变形校正功能,可以有效地对摄像头捕捉到的画面进行修正,呈现更真实的环视效果,提高了系统的使用体验。
4. 多种显示模式系统支持多种显示模式,可以根据不同驾驶场景选择合适的显示模式,满足不同驾驶员的需求。
一种基于2组摄像头的车载全景环视系统设计
一种基于2组摄像头的车载全景环视系统设计1. 引言1.1 研究背景现代车载环视系统越来越受到人们的关注,因为它在提高驾驶安全性和方便性方面具有重要意义。
传统的车载摄像头系统只能提供有限的视野范围,无法完全覆盖车辆周围的环境,容易产生盲区,给驾驶员带来安全隐患。
为了解决这一问题,基于2组摄像头的车载全景环视系统应运而生。
在过去的几年里,随着车载摄像头技术的不断进步和成本的降低,基于2组摄像头的车载全景环视系统逐渐成为了汽车行业的热点研究方向。
通过将摄像头安装在车辆的前、后、左、右四个方向,系统能够利用图像处理技术将这些摄像头捕捉到的画面拼接成一个全景图像,实现对车辆周围环境的全方位监测。
基于2组摄像头的车载全景环视系统在提高驾驶安全性方面具有巨大的潜力,它能够帮助驾驶员更清晰地了解车辆周围的情况,减少交通事故的发生概率。
该系统还能够简化停车操作,提高驾驶乐趣,提升车辆的使用体验。
研究基于2组摄像头的车载全景环视系统具有重要的现实意义和市场前景。
1.2 研究目的研究目的是为了探究一种基于2组摄像头的车载全景环视系统设计,以提高汽车驾驶过程中的安全性和便利性。
通过将多个摄像头所拍摄的画面实时拼接成全景图像,驾驶员可以清晰地查看车辆周围的环境,包括盲区和障碍物,从而避免交通事故的发生。
全景环视系统还可以为驾驶员提供停车辅助功能,帮助他们更轻松地进行停车操作。
通过研究和设计这种系统,我们的目的是提高车辆的安全性,减少交通事故的发生率,同时提升驾驶的舒适性和便利性。
我们也希望通过这项研究,为汽车行业的智能化发展做出贡献,推动车载摄像技术的应用和发展。
2. 正文2.1 系统设计原理车载全景环视系统是一种基于2组摄像头的先进技术,其设计原理主要包括摄像头布局、图像拼接和实时显示。
摄像头布局是设计的关键,通过在车辆四周安装多个摄像头,可以实现全方位覆盖,实现车辆周围环境的实时监控。
图像拼接是实现全景效果的核心技术,通过将各个摄像头捕捉到的图像进行拼接处理,可以实现全景图像的显示。
一种基于2组摄像头的车载全景环视系统设计
一种基于2组摄像头的车载全景环视系统设计车载全景环视系统是一种以摄像头为基础的安全系统,旨在提供驾驶人员全方位的视角,帮助他们更好地理解周围的环境。
本文将介绍一种基于2组摄像头的车载全景环视系统的设计。
车载全景环视系统通常由多个摄像头组成,这些摄像头分布在汽车的各个位置。
每个摄像头会捕捉到汽车周围的图像,并通过一台中央处理器将这些图像拼接在一起,形成一个全景图像。
这个全景图像会实时地显示在车载显示屏上,驾驶人员可以通过这个图像来了解车辆周围的情况。
本设计方案中,我们使用了2组摄像头,每组包含4个摄像头。
两组摄像头分别安装在汽车的前、后、左、右四个方位上,以实现全方位的覆盖。
每个摄像头都具有高清分辨率和广角镜头,可以捕捉到更大范围的画面。
在设计中,我们采用了一台中央处理器来处理摄像头捕捉到的图像。
该处理器具有强大的计算能力和图像处理能力,能够将四个摄像头捕捉到的图像拼接在一起,并实时显示在车载显示屏上。
中央处理器还可以实现一些增强功能,如图像增强、障碍物检测等,以提高驾驶人员的驾驶安全性。
为了方便驾驶人员使用,我们还设计了一个用户界面。
驾驶人员可以通过车载显示屏上的菜单来选择不同的图像显示模式,如全景模式、分割屏模式等。
在全景模式下,驾驶人员可以看到整个车辆周围的情况;在分割屏模式下,驾驶人员可以看到各个摄像头单独的图像,以便更详细地观察某个方位。
我们还可以将车载全景环视系统与其他车辆安全系统集成。
我们可以将摄像头与倒车雷达进行联合使用,在倒车过程中提供更全面的后方情况。
我们还可以将车载全景环视系统与车道偏离预警系统结合,实时检测车辆是否偏离了车道,并提醒驾驶人员进行纠正。
基于2组摄像头的车载全景环视系统在驾驶安全方面具有重要的意义。
它能够为驾驶人员提供全方位的视角,帮助他们更好地理解周围的环境,并及时做出正确的驾驶决策,从而提高驾驶的安全性和舒适性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双核 DaVinci 高速实时DSP系统平台
基于TMS320DM6446的DSP硬件平台
– TMS320DM6446 DSP微处理器
– 视频采集前端 – 视频处理后端
DSP 视频处理硬件框架图
双核 DaVinci 高速实时DSP系统平台
软件框架介绍
– DaVinci(达芬奇)双核处理系统
360°全景摄像头的自主设计
光学Lens系统设计
Lens 设计重点
畸变鱼眼镜头重要参数(体视投影、等距投影、等立体角投影、正交投影)
f-theta畸变曲线
3
2
f*tan w 2*f*tan(w/2) f*w 2*f*sin(w/2) f*sin w
1
0 0 20 40 60 80
360°全景摄像头的自主设计
硬件电路设计
摄像头结构设计
360°全景摄像头的自主设计
全景摄像头成品展示
Lens系统 全景摄像头
鱼眼成像校正及图像拼接算法
校正及拼接算法背景分析
鱼眼成像校正及图像拼接算法
图像校正算法 镜头的成像畸变情况是 跟设计时的畸变曲线一一对
应的,因此在此提出一种
基于镜头畸变曲线的精确的
项目简介
项目功能概括
项目简介
项目优势体现 1 2 3 4 360°全景摄像头 双核 DaVinci 高速实时DSP系统平台 图像自动智能拼接和自动校准 解决行车难题:泊车、行车
360°全景摄像头的自主设计
光学Lens系统设计 图像传感器选择
– MT9V127 CMOS图像传感器
车载全景显示系统的设计 与实现
THE DESIGN AND IMPLEMENTAION OF THE CAR PANORAMIC DISPLAY SYSTEM
答辩概要
项目简介
– 项目功能概括
– 项目优势体现
360°全景摄像头的自主设计
鱼眼成像校正及图像拼接算法 双核 DaVinci 高速DSP系统平台 成果展示
校正算法。
鱼眼成像校正及图像拼接算法
图像畸变校正效果图
畸变校正前
畸变校正后
鱼眼成像校正及图像拼接算法
图像拼接算法 图像拼接前提—透视变换
透视变换前
透视变换后
鱼眼成像校正及图像拼接算法
鱼眼成像校正及图像拼接算法
双核 DaVinci 高速实时DSP系统平台
1
2 3
基于TMS320DM6446的硬件平台 软件框架介绍 视频流的处理过程
CMOS集成度高、功耗低 色彩宽动态范围 重量轻、体积小、价格低
硬件电路设计 全景摄像头结构设计
360°全景摄像头的自主设计
光学Lens系统设计
Lens系统设计参数表
名称 像面大小 视场角 焦距 F/# 物距 TTL TV畸变 mm 210° 1.1mm 定口径,F/2.8 无限远 <12mm >-5 1G+3P 470~650nm
– CODEC ENGINE 通信机制
DSP 视频处理软件框架图
双核 DaVinci 高速实时DSP系统平台
DSP 视频流的处理过程
成果展示
实验场景
车载全景显示系统的设计与实现