单片机程序 8255控制交通灯程序
8255控制交通灯实验总结

8255控制交通灯实验总结
8255控制
交通灯实验总结
一、实验目的
1. 掌握8255控制器的控制原理和编程过程;
2. 学习8255控制器的编程、基本操作;
3. 通过实验指导的方式,掌握控制交通灯的基本原理;
4. 通过编程,实现交通灯控制系统的实现。
二、实验过程
1. 首先要对8255的编程进行编程,这就需要根据8255的控制字节和模式的要求进行操作;
2. 然后用它来控制交通灯,这需要根据交通灯的运行原理和总线接线的方式来编程控制它;
3. 然后对所做程序进行测试,以验证其控制的可靠性。
三、实验结果
通过本次实验,我们学会了怎样编程控制8255,并且学会了8255控制交通灯的方式,本次实验编程操作也顺利完成,经测试验证,程序实现的正确,交通灯可以根据8255控制运行。
四、总结
本次实验主要是让我们学习掌握8255模块的操作,实现8255控制交通灯的运行,实验结果证明,程序实现正确,交通灯可以根据8255控制运行。
今后,如果能继续拓展,可以把8255用来控制更复
杂的系统,这将有助于我们深入了解和掌握8255控制器的操作技术。
8255控制交通灯实验原理

8255控制交通灯实验原理我们需要了解交通灯的工作原理。
一般来说,交通灯是通过控制红、黄、绿三个灯的亮灭来指示交通的状态。
红灯表示停车,黄灯表示准备行车,绿灯表示可以行车。
交通灯的亮灭是通过控制电流的开关来实现的。
在实验中,我们将使用8255芯片的三个I/O端口来控制交通灯的红、黄、绿三个灯。
具体来说,我们将把红灯连接到8255芯片的一个I/O端口,黄灯连接到另一个I/O端口,绿灯连接到第三个I/O端口。
通过编程控制这三个I/O端口的输出电平,我们就可以控制交通灯的亮灭。
在编程方面,我们需要使用汇编语言来编写控制程序。
首先,我们需要初始化8255芯片的工作模式。
通过将控制字写入控制寄存器,我们可以将8255芯片设置为输出模式,同时设置输出的电平。
然后,我们需要编写一个循环程序,不断改变输出的电平,从而实现交通灯灯光的变换。
具体来说,我们可以通过改变红、黄、绿三个灯的输出电平的组合来控制交通灯的亮灭。
在实验中,我们可以通过按下开关来触发交通灯的变换。
当按下开关时,控制程序将会执行一次循环,改变交通灯的亮灭状态。
这样,我们就可以通过按下开关来模拟交通灯的工作过程。
通过这个实验,我们可以更好地理解8255芯片的工作原理,并且掌握使用8255芯片来控制外部设备的方法。
在实际应用中,我们可以利用8255芯片来控制各种外部设备,如LED灯、电机等。
这样,我们可以通过编程来实现对外部设备的控制,从而实现各种功能。
使用8255芯片来控制交通灯是一种简单而有效的方法。
通过编程控制8255芯片的输出电平,我们可以实现交通灯的亮灭变换。
这个实验不仅可以帮助我们更好地理解8255芯片的工作原理,还可以培养我们的编程能力。
希望通过这个实验,我们可以更好地掌握8255芯片的使用,为以后的学习和工作打下良好的基础。
8086系统 8255并行 交通灯控制程序(汇编程序代码+详细注释内容)
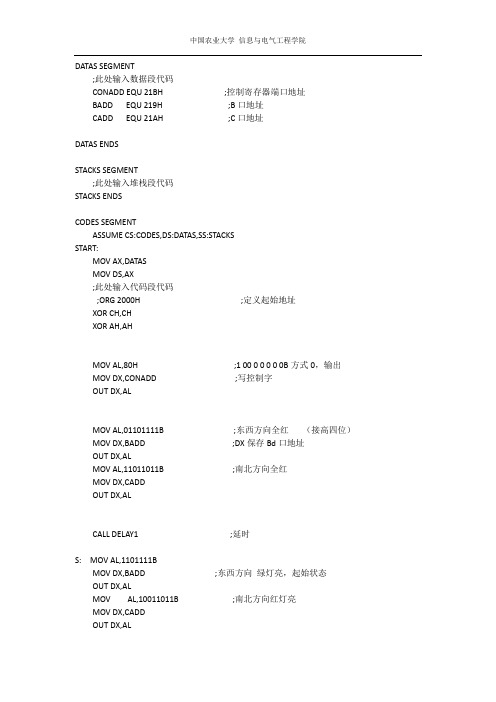
DATAS SEGMENT;此处输入数据段代码CONADD EQU 21BH ;控制寄存器端口地址BADD EQU 219H ;B口地址CADD EQU 21AH ;C口地址DATAS ENDSSTACKS SEGMENT;此处输入堆栈段代码STACKS ENDSCODES SEGMENTASSUME CS:CODES,DS:DATAS,SS:STACKSSTART:MOV AX,DATASMOV DS,AX;此处输入代码段代码;ORG 2000H ;定义起始地址XOR CH,CHXOR AH,AHMOV AL,80H ;1 00 0 0 0 0 0B方式0,输出MOV DX,CONADD ;写控制字OUT DX,ALMOV AL,01101111B ;东西方向全红(接高四位)MOV DX,BADD ;DX保存Bd口地址OUT DX,ALMOV AL,11011011B ;南北方向全红MOV DX,CADDOUT DX,ALCALL DELAY1 ;延时S: MOV AL,1101111BMOV DX,BADD ;东西方向绿灯亮,起始状态OUT DX,ALMOV AL,10011011B ;南北方向红灯亮MOV DX,CADDOUT DX,ALCALL DELAY2 ;长延时MOV CX,0005H ;黄灯闪5次Y1: MOV AL,10111111BMOV DX,BADDOUT DX,ALMOV AL,01011011BMOV DX,CADDOUT DX,AL ;黄灯亮CALL DELAY3MOV AL,11111111BMOV DX,BADDOUT DX,ALMOV AL,11011011BMOV DX,CADDOUT DX,AL ;黄灯灭CALL DELAY3LOOP Y1MOV AL,01101111BMOV DX,BADDOUT DX,ALMOV AL,11110110BMOV DX,CADD ;东西红灯,南北绿灯OUT DX,ALCALL DELAY2 ;长延时MOV CX,0005H ;黄灯闪5次Y2: MOV AL,01101111BMOV DX,BADDOUT DX,ALMOV AL,11101101BMOV DX,CADDOUT DX,ALCALL DELAY2MOV AL,01101111BMOV DX,BADDOUT DX,ALMOV AL,11111111BMOV DX,CADDOUT DX,ALCALL DELAY2LOOP Y2MOV AH,1;待定,有键按下退出INT 16HJZ SMOV AH,4CHINT 21H;回到起始状态,不断循环DELAY1 PROC NEAR ;短延时子过程PUSH CX ;CX入栈保护(保护外循环次数)MOV CX,08000H ;置LOOP次数T:LOOP T ;跳转至本身,延时作用POP CX ;CX出栈RET ;返回DELAY1 ENDPDELAY2 PROC NEAR ;长延时子过程PUSH AX ;AX(AL)入栈保护PUSH CX ;CX入栈保护MOV CX,0010H ;置LOOP次数K:CALL DELAY1 ;调用短延时LOOP K ;循环一次,CX减1POP CX ;数据出栈,先进后出POP AXRET ;返回DELAY2 ENDPDELAY3 PROC NEAR ;长延时子过程PUSH AX ;AX(AL)入栈保护PUSH CX ;CX入栈保护MOV CX,0010H ;置LOOP次数Q:CALL DELAY1 ;调用短延时LOOP Q ;循环一次,CX减1POP CX ;数据出栈,先进后出POP AXRET ;返回DELAY3 ENDPCODES ENDSEND START。
微机原理课程设计-8255控制交通灯[精选合集]
![微机原理课程设计-8255控制交通灯[精选合集]](https://img.taocdn.com/s3/m/78c99ded7e192279168884868762caaedc33ba56.png)
微机原理课程设计-8255控制交通灯[精选合集]第一篇:微机原理课程设计-8255控制交通灯微机原理课程设计:8255模拟交通灯1、目的:学习8255使用方法,学习模拟交通灯控制的方法,学习双色灯的使用。
2、要求:控制4个双色LED灯(可发红,绿,黄光),模拟十字路口交通灯管理。
3、电路及连线PC0-PC3连DG1-DG4,PC4-PC7连DR1-DR4。
8255片选CS8255连138译码处210H。
4、说明(1)因为本实验是模拟交通灯控制实验,所以要先了解实际交通灯的变化规律。
假设一个十字路口为东西南北走向。
初始状态0为东西红灯,南北红灯。
然后转状态1南北绿灯通车,东西红灯。
过一段时间转状态2,南北绿灯闪几次转亮黄灯,延时几秒,东西仍然红灯。
再转状态3,东西绿灯通车,南北红灯。
过一段时间转状态4,东西绿灯闪几次转亮黄灯,延时几秒,南北仍然红灯。
最后循环至状态1。
(2)双色LED是由一个红色LED管芯和一个绿色LED管芯封装在一起,公用负端。
当红色正端加高电平,绿色正端加低电平时,红灯亮;红色正端加低电平,绿色正端加高电平时,绿灯亮;两端都加高电平时,黄灯亮。
(3)74LS240为8输入输出的反向驱动器。
5、完成的任务(1)利用计算机和微机原理试验箱,将实验6的程序Tlamp_88.asm在试验箱运行和调试。
全速运行,观察整体效果。
单步运行,观察程序每条语句额执行效果,理解语句含义。
(2)修改实验连线为,PC7-PC4连DG1-DG4,PC3-PC0连DR1-DR4。
8255片选CS8255连138译码处210H孔。
将Tlamp_88.asm另存为jiaotong.asm。
修改jiaotong.asm,实现交通灯原有功能。
(3)修改实验连线为,PB7-PB4连DG1-DG4,PB3-PB0连DR1-DR4。
8255片选CS8255连138译码处210H孔。
将jiaotong.asm另存为jiaotong2.asm。
单片机8255交通灯程序
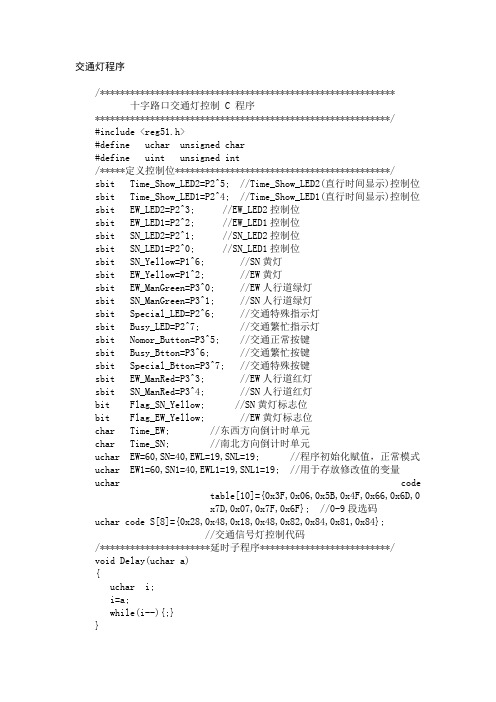
交通灯程序/*********************************************************** 十字路口交通灯控制 C 程序***********************************************************/#include <reg51.h>#define uchar unsigned char#define uint unsigned int/*****定义控制位*******************************************/sbit Time_Show_LED2=P2^5; //Time_Show_LED2(直行时间显示)控制位sbit Time_Show_LED1=P2^4; //Time_Show_LED1(直行时间显示)控制位sbit EW_LED2=P2^3; //EW_LED2控制位sbit EW_LED1=P2^2; //EW_LED1控制位sbit SN_LED2=P2^1; //SN_LED2控制位sbit SN_LED1=P2^0; //SN_LED1控制位sbit SN_Yellow=P1^6; //SN黄灯sbit EW_Yellow=P1^2; //EW黄灯sbit EW_ManGreen=P3^0; //EW人行道绿灯sbit SN_ManGreen=P3^1; //SN人行道绿灯sbit Special_LED=P2^6; //交通特殊指示灯sbit Busy_LED=P2^7; //交通繁忙指示灯sbit Nomor_Button=P3^5; //交通正常按键sbit Busy_Btton=P3^6; //交通繁忙按键sbit Special_Btton=P3^7; //交通特殊按键sbit EW_ManRed=P3^3; //EW人行道红灯sbit SN_ManRed=P3^4; //SN人行道红灯bit Flag_SN_Yellow; //SN黄灯标志位bit Flag_EW_Yellow; //EW黄灯标志位char Time_EW; //东西方向倒计时单元char Time_SN; //南北方向倒计时单元uchar EW=60,SN=40,EWL=19,SNL=19; //程序初始化赋值,正常模式uchar EW1=60,SN1=40,EWL1=19,SNL1=19; //用于存放修改值的变量uchar codetable[10]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F}; //0-9段选码uchar code S[8]={0x28,0x48,0x18,0x48,0x82,0x84,0x81,0x84};//交通信号灯控制代码/**********************延时子程序**************************/void Delay(uchar a){uchar i;i=a;while(i--){;}}/*****************显示子函数******************************/ void Display(void){uchar h,l;h=Time_EW/10;l=Time_EW%10;P0=table[l];EW_LED2=1; //点亮EW_LED2Delay(2);EW_LED2=0; //熄灭EW_LED2P0=table[h];EW_LED1=1; //点亮EW_LED1Delay(2);EW_LED1=0;h=Time_SN/10;l=Time_SN%10;P0=table[l];SN_LED2=1; //点亮SN_LED2Delay(2);SN_LED2=0;P0=table[h];SN_LED1=1; //点亮SN_LED1Delay(2);SN_LED1=0;h= EW1/10;l= EW1%10;P0=table[l];Time_Show_LED1=1; //点亮Time_Show_LED1Delay(2);Time_Show_LED1=0;P0=table[h];Time_Show_LED2=1; //点亮Time_Show_LED2Delay(2);Time_Show_LED2=0;}/**********************外部0中断服务程序******************/void INT0_srv(void)interrupt 0 using 1{EX0=0; //关中断if(Nomor_Button==0) //测试按键是否按下,按下为正常状态 {EW1=60;SN1=40;EWL1=19;SNL1=19;Busy_LED=0; //关繁忙信号灯Special_LED =0; //关特殊信号灯}if(Busy_Btton==0) //测试按键是否按下,按下为繁忙状态 {EW1=45;SN1=30;EWL1=14;SNL1=14;Special_LED=0; //关特殊信号灯Busy_LED=1; //开繁忙信号灯}if(Special_Btton==0)//测试按键是否按下,按下为特殊状态 {EW1=75;SN1=55;EWL1=19;SNL1=19;Busy_LED=0; //关繁忙信号灯Special_LED =1;//开特殊信号灯}EX0=1; //开中断}/**********************T0中断服务程序*******************/ void timer0(void)interrupt 1 using 1{static uchar count;TH0=(65536-50000)/256;TL0=(65536-50000)%256;count++;if(count==10){if(Flag_SN_Yellow==1) //测试南北黄灯标志位{SN_Yellow=~SN_Yellow;}if(Flag_EW_Yellow==1) //测试东西黄灯标志位{EW_Yellow=~EW_Yellow;}}if(count==20){Time_EW--;Time_SN--;if(Flag_SN_Yellow==1) //测试南北黄灯标志位{SN_Yellow=~SN_Yellow;}if(Flag_EW_Yellow==1) //测试东西黄灯标志位{EW_Yellow=~EW_Yellow;}count=0;}}/*********************主程序开始***********************/ void main(void){Busy_LED=0;Special_LED=0;IT0=1; //INT0负跳变触发TMOD=0x01; //定时器工作于方式1TH0=(65536-50000)/256; //定时器赋初值TL0=(65536-50000)%256;EA=1; //CPU开中断总允许ET0=1; //开定时中断EX0=1; //开外部INTO中断TR0=1; //启动定时while(1){/*******S0状态**********/SN_ManRed=0;SN_ManGreen=1; //SN人行道通行EW_ManRed=1; //EW人行道禁止EW_ManGreen=0;Flag_EW_Yellow=0; //EW关黄灯显示信号Time_EW=EW;Time_SN=SN;while(Time_SN>=5){P1=S[0]; //SN绿灯,EW红灯Display();}/*******S1状态**********/P1=0x00;while(Time_SN>=0){Flag_SN_Yellow=1; //SN开黄灯信号位P1=P1|0x08; //保持EW红灯Display();}/*******S2状态**********/SN_ManRed=1; //SN人行道禁止SN_ManGreen=0;EW_ManRed=1; //EW人行道禁止EW_ManGreen=0;Flag_SN_Yellow=0; //SN关黄灯显示信号Time_SN=SNL;while(Time_SN>=5){P1=S[2]; //SN左拐绿灯亮,EW红灯Display();}/*******S3状态**********/P1=0x00;while(Time_SN>=0){Flag_SN_Yellow=1; //SN开黄灯信号位P1=P1|0x08; //保持EW红灯Display();}/***********赋值*********/EW=EW1;SN=SN1;EWL=EWL1;SNL=SNL1;/*******S4状态**********/SN_ManRed=1; //SN人行道禁止SN_ManGreen=0;EW_ManRed=0;EW_ManGreen=1; //EW人行道通行Flag_SN_Yellow=0; //SN关黄灯显示信号Time_EW=SN;Time_SN=EW;while(Time_EW>=5){P1=S[4]; //EW通行,SN红灯Display();}/*******S5状态**********/P1=0X00;while(Time_EW>=0){Flag_EW_Yellow=1;//EW开黄灯信号位P1=P1|0x80; //保持SN红灯Display();}/*******S6状态**********/SN_ManRed=1; //SN人行道禁止SN_ManGreen=0;EW_ManRed=1; //EW人行道禁止EW_ManGreen=0;Flag_EW_Yellow=0;//EW关黄灯显示信号Time_EW=EWL;while(Time_EW>=5){P1=S[6]; //EW左拐绿灯亮,SN红灯Display();}/*******S7状态**********/P1=0X00;while(Time_EW>=0){Flag_EW_Yellow=1; //EN开黄灯信号位P1=P1|0x80; //保持SN红灯Display();}/***********赋值********/EW=EW1;SN=SN1;EWL=EWL1;SNL=SNL1;}}。
8255交通灯控制实验
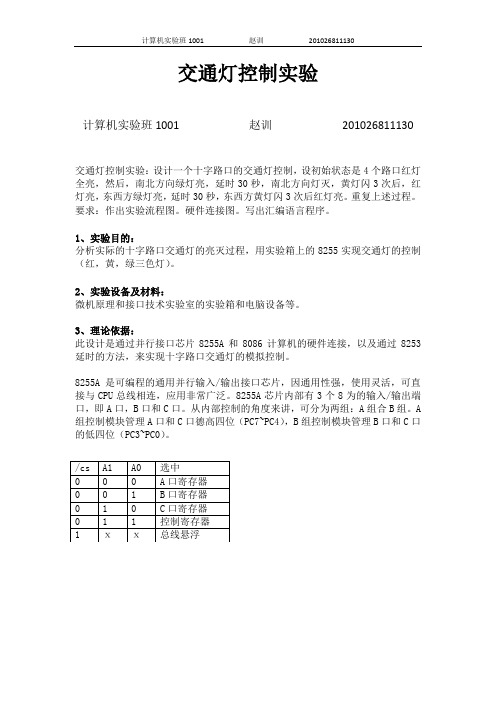
交通灯控制实验计算机实验班1001 赵训201026811130交通灯控制实验:设计一个十字路口的交通灯控制,设初始状态是4个路口红灯全亮,然后,南北方向绿灯亮,延时30秒,南北方向灯灭,黄灯闪3次后,红灯亮,东西方绿灯亮,延时30秒,东西方黄灯闪3次后红灯亮。
重复上述过程。
要求:作出实验流程图。
硬件连接图。
写出汇编语言程序。
1、实验目的:分析实际的十字路口交通灯的亮灭过程,用实验箱上的8255实现交通灯的控制(红,黄,绿三色灯)。
2、实验设备及材料:微机原理和接口技术实验室的实验箱和电脑设备等。
3、理论依据:此设计是通过并行接口芯片8255A和8086计算机的硬件连接,以及通过8253延时的方法,来实现十字路口交通灯的模拟控制。
8255A是可编程的通用并行输入/输出接口芯片,因通用性强,使用灵活,可直接与CPU总线相连,应用非常广泛。
8255A芯片内部有3个8为的输入/输出端口,即A口,B口和C口。
从内部控制的角度来讲,可分为两组:A组合B组。
A 组控制模块管理A口和C口德高四位(PC7~PC4),B组控制模块管理B口和C口的低四位(PC3~PC0)。
如硬件连接图所示(在后),红灯(RLED),黄灯(YLEDD)和绿灯(GLED)分别接在8255的A,B,C口的低四位端口,PA0,PA1,PA2,PA3分别接1,2,3,4(南东北西)路口的红灯,B,C口类推。
8086工作在最小模式,低八位端口AD0~AD7接到8255和8253的D0~D7,AD8~AD15通过地址锁存器8282,接到三八译码器,译码后分别连到8255和8253的CS片选端。
8253的三个门控端接+5V,CLOCK0接由分频器产生的1MHZ的时钟脉冲,OUT0接到CLOCK1和CLOCK2,OUT1接到8086的AD18,8086通过检测此端口是否有高电平来判断是否30s定时到。
OUT2产生1MHZ方波通过或门和8255的B口共同控制黄灯的闪烁。
8255控制交通灯

专业:机电一体化班级:机电姓名:学号:设计题目:8255控制交通灯设计条件:了解8255芯片的结构及编程方法,学习模拟交通灯控制的实现方法。
用8255做输出口,控制十二个发光二极管燃灭,模拟交通灯管理。
功能说明:假设一个十字路口为东西南北走向。
交通灯的变化情况和规律如下,初始状态0为东西红灯,南北红灯。
然后转状态1东西绿灯通车,南北红灯。
过一段时间转状态2,东西绿灯灭,黄灯闪烁几次,南北仍然红灯。
再转状态3,南北绿灯通车,东西红灯。
过一段时间转状态4,南北绿灯灭,闪几次黄灯,延时几秒,东西仍然红灯。
最后循环至状态1。
设计任务:使用单片机作为控制器来模拟交通灯控制。
具体采用8255芯片做为输出口,控制十二个发光二极管燃灭,模拟交通灯管理。
要求掌握单片机的结构和功能,学会较简单单片机系统的硬件设计,并能通过汇编语言进行软件编程,完成要求的功能,同时熟练掌握8255A芯片的结构及使用。
设计报告内容包括:1)系统设计方案2)硬件电路图及硬件电路功能说明3)软件实现方法及程序流程图4)源程序及调试结果摘要自从交通灯诞生以来,其内部的电路控制系统就不断地被改进,设计方法也多种多样,从而使交通灯显得更加智能化。
由于单片机本身具有通讯联网功能,将同一条道路上的信号灯组成一局域网进行统一调度管理,可缩短车辆通行等候时间,实现科学化管理。
论文提出了一种涉及单片机的无人智能交通灯管理系统的控制方案,鉴于时间及所学知识所限,文中仅对系统中的一个节点____一个十字路口交通灯的管理进行了具体实现。
以8751芯片作为主控制器,可编程并行接口芯片8255作为扩展输出口,通过十二个发光二极管来模拟进行交通灯的燃灭管理,并详细阐述了其工作原理、基本功能框图、关键设计技术及软件工作流程,对选用芯片的特点进行了分析,并最后进行了软件实现,达到了系统要求的功能。
目录第一章绪论 (1)1.1 单片机在电子产品中的应用 (1)1.2 课题背景及设计思想 (2)第二章系统控制要求 (4)第三章交通灯总体设计方案 (5)3.1 总体设计思路 (5)3.2 设计框图 (5)第四章硬件设计 (7)4.1 主控芯片8751 (7)4.2 扩展并行I/O口8255 (10)4.3 数据缓冲器器芯片74LS244 (12)4.4 时钟振荡电路 (12)第五章软件设计 (14)5.1 交通信号灯控制流程图 (14)5.2 控制程序 (15)第六章结论 (18)参考文献 (19)致谢 (20)附:硬件电路图 (21)第一章绪论1.1 单片机在电子产品中的应用单片机又称微控制器MCU(MicroController Unit),由于用它可以很容易地将计算机嵌入到各种仪器和现场控制设备中,因此单片机也叫嵌入式微控制器(Embedded MCU)。
8255控制交通灯
专业:机电一体化班级:机电姓名:学号:设计题目:8255控制交通灯设计条件:了解8255芯片的结构及编程方法,学习模拟交通灯控制的实现方法。
用8255做输出口,控制十二个发光二极管燃灭,模拟交通灯管理。
功能说明:假设一个十字路口为东西南北走向。
交通灯的变化情况和规律如下,初始状态0为东西红灯,南北红灯。
然后转状态1东西绿灯通车,南北红灯。
过一段时间转状态2,东西绿灯灭,黄灯闪烁几次,南北仍然红灯。
再转状态3,南北绿灯通车,东西红灯。
过一段时间转状态4,南北绿灯灭,闪几次黄灯,延时几秒,东西仍然红灯。
最后循环至状态1。
设计任务:使用单片机作为控制器来模拟交通灯控制。
具体采用8255芯片做为输出口,控制十二个发光二极管燃灭,模拟交通灯管理。
要求掌握单片机的结构和功能,学会较简单单片机系统的硬件设计,并能通过汇编语言进行软件编程,完成要求的功能,同时熟练掌握8255A芯片的结构及使用。
设计报告内容包括:1)系统设计方案2)硬件电路图及硬件电路功能说明3)软件实现方法及程序流程图4)源程序及调试结果摘要自从交通灯诞生以来,其内部的电路控制系统就不断地被改进,设计方法也多种多样,从而使交通灯显得更加智能化。
由于单片机本身具有通讯联网功能,将同一条道路上的信号灯组成一局域网进行统一调度管理,可缩短车辆通行等候时间,实现科学化管理。
论文提出了一种涉及单片机的无人智能交通灯管理系统的控制方案,鉴于时间及所学知识所限,文中仅对系统中的一个节点____一个十字路口交通灯的管理进行了具体实现。
以8751芯片作为主控制器,可编程并行接口芯片8255作为扩展输出口,通过十二个发光二极管来模拟进行交通灯的燃灭管理,并详细阐述了其工作原理、基本功能框图、关键设计技术及软件工作流程,对选用芯片的特点进行了分析,并最后进行了软件实现,达到了系统要求的功能。
目录第一章绪论 (1)1.1 单片机在电子产品中的应用 (1)1.2 课题背景及设计思想 (2)第二章系统控制要求 (4)第三章交通灯总体设计方案 (5)3.1 总体设计思路 (5)3.2 设计框图 (5)第四章硬件设计 (7)4.1 主控芯片8751 (7)4.2 扩展并行I/O口8255 (10)4.3 数据缓冲器器芯片74LS244 (12)4.4 时钟振荡电路 (12)第五章软件设计 (14)5.1 交通信号灯控制流程图 (14)5.2 控制程序 (15)第六章结论 (18)参考文献 (19)致谢 (20)附:硬件电路图 (21)第一章绪论1.1 单片机在电子产品中的应用单片机又称微控制器MCU(MicroController Unit),由于用它可以很容易地将计算机嵌入到各种仪器和现场控制设备中,因此单片机也叫嵌入式微控制器(Embedded MCU)。