基于STM32微控制器的交流电机电磁调速系统
基于单片机控制的交流电机调压调速系统的设计说明

基于单片机控制的交流电机调压调速系统的设计引言近年来由于微型机的快速发展,国外交直流系统数字化已经达到实用阶段。
由于以微处理器为核心的数字控制系统硬件电路的标准化程度高,制作成本低,且不受器件温度漂移的影响,且单片机具有功能强、体积小、可靠性好和价格便宜等优点,现已逐渐成为工厂自动化和各控制领域的支柱之一。
其控制软件能够进行逻辑判断和复杂运算,可以实现不同于一般线性调节的最优化、自适应、非线性、智能化等控制规律。
所以微机数字控制系统在各个方面的性能都远远优于模拟控制系统且应用越来越广泛。
在现代工业企业中,绝大多数工作机械的运行时由电动机拖动的,因而掌握拖动系统的调速知识是十分重要的。
电动机调速分为直流调速和交流调速。
直流电动机的调速性能好,因此在调速领域中曾一直占主导地位。
交流电动机与直流电动机相比,具有结构简单、构造方便、成本低廉、运行可靠、坚固耐用、运行效率高等许多优点,以前未得到大规模的应用,主要是由于调速困难。
随着现代科学技术的高速发展,现代电力电子技术、微电子学、现代控制理论、微机控制技术等为交流电机调速提供了全新的理论和技术,使得交流电力拖动系统逐步具备了宽的调速范围、高地稳速范围、高的稳速精度、快的动态响应以及在四象限作可逆运行等良好的技术性能。
可以说,自20世纪80年代开始交流调速技术就已进入了一个新的时代,也就是可以与直流调速相媲美并逐渐取而代之占据电力传动主导地位的时代。
本文主要内容是研究采用单片机控制的调压调速系统,通过软件编程控制电动机的变压调速。
第一章绪论1.1电动机调速系统的发展概况及趋势在电气时代的今天,电动机一直在现代化的生产和生活中起着十分重要的作用。
无论是在工业生产、交通运输、国防、航空航天、医疗卫生、商务与办公设备中,还是在日常生活中的家用电器中,都大量地使用着各种各样的电动机。
据资料统计,现在有90%以上的动力源来自于电动机。
我国生产的电能大约有60%用于电动机。
基于stm32单片机的直流电机调速系统设计
基于stm32单片机的直流电机调速系统设计
本文介绍一种基于STM32单片机的直流电机调速系统设计,主要包括硬件电路设计和软件程序设计两部分。
硬件电路设计:
该电机调速系统的主要硬件电路包括电源模块、STM32单片机控制电路、直流电机驱动电路和反馈电路。
1. 电源模块
电源模块包括AC/DC变换模块和稳压模块,用于将输入的AC电压转换为适宜单片机和电机工作的DC电压。
2. STM32单片机控制电路
STM32单片机控制电路包括主控芯片STM32单片机、晶振、复位电路和下载程序电路等。
3. 直流电机驱动电路
直流电机驱动电路包括电机驱动芯片(如L298N)和电机,用于控制电机的转
速和方向。
4. 反馈电路
反馈电路包括编码器和光电传感器等,用于实现电机转速的反馈和闭环控制。
软件程序设计:
该电机调速系统的软件程序采用C语言编写,主要包括定时器计数、PWM输出控制、编码器读取、PID算法控制等模块。
1. 定时器计数
通过STM32单片机内部定时器计数来实现电机转速的测量和控制。
2. PWM输出控制
采用STM32单片机内部PWM输出控制模块控制电机的转速,并实现电机方向的控制。
3. 编码器读取
通过编码器读取电机的转速信息,并反馈到单片机进行控制和显示。
4. PID算法控制
采用PID(比例、积分、微分)算法控制电机的转速,实现闭环控制,提高控制精度。
总之,基于STM32单片机的直流电机调速系统设计,既可以提高电机运行的效率和精度,又可以简化电路结构和减小系统成本,具有较好的应用前景。
基于STM32的交流永磁同步电机驱动器设计

基于STM32的交流永磁同步电机驱动器设计时间:2011-07-26 16:33:10 来源:现代电子技术作者:武玉婷,张娜西安工程大学摘要:针对交流永磁同步电机(PMSM)的控制特点,分别从功率电路和控制方法两方面进行了分析和设计。
硬件方面采用先进的智能功率模块IPM,极大地简化了电路设计;软件上应用以Cortex-M3为内核的STM32,其丰富的电机库函数降低了研发周期。
FOC+SVPWM方法进一步提高了交流伺服系统的性能,使其具有与直流电机一样的调速性能。
该系统已应用到实际的圆网印花机环境中。
通过实践验证该系统具有较强的鲁棒性,符合工业控制的需要。
关键词:永磁同步电机;STM32;FOC+SVPWM引言近年来,随着微电子技术、电力电子技术、现代控制技术、材料技术的迅速发展以及电机制造工艺水平的逐步提高,交流永磁同步电机以其体积小、结构简单等特点在工农业、日常生活以及许多高科技中迅速得到了广泛的应用。
因此,研究设计高精度、高性能的永磁同步电机成为现代电伺服驱动系统的一个发展趋势。
伺服驱动器按照功能特征可分为功率板和控制板两个独立的模块,本文在分析交流永磁同步电机控制性能的基础上分别对控制单元和功率驱动单元进行了具体的设计。
控制单元作为伺服系统的核心,要求有较高的性能,为此,论文采用意法半导体推出的STM32作为控制核心芯片。
它是基于ARM先进架构的Cortex-M3为内核的32位微处理器,主频可高达72 MHz。
强大的内核及其丰富的外设使其在马达控制应用领域得到广泛的使用。
功率驱动单元应用了IPM(智能功率模块),与以往的IGBT相比较,IPM FSAM20SH60A内部集成欠电压、过电流和温度检测等保护电路,简化了伺服系统单元的设计,实现了伺服系统的模块化和微型化。
1 PMSM伺服系统的基本构架PMSM控制系统的原理构成如图1所示,它包括主电路、伺服控制单元、功率驱动单元、保护单元以及信号反馈采集单元。
基于STM32控制的双电动机交流调速系统

CHEN Zheng—shil,JIN Lai—zhuanl”,SONG Jun-zhen91·2 (1.Maoming College,Maoming 525000,China;2.Taiyuan University of Technology,Taiyuan 030024,China)
空载转速降至儿孟。由于转速不能突变,使M2转换 到n位对应的机械特性曲线工作点K(死,n。)。这 时,t。<瓦,即M1的电磁转矩小于负载转矩。由图 、2可知,此时M1、M2转速将下降,直至到达新的平 衡点召、曰。点,此时t。=吃,n:_玷:。与原平衡点相 比,t。>Tol,咒>Ta,即M1的电磁转矩和负载转矩 均增大。同理,若提高M2的控制频率五,^不变, 即减少频差,则M2的空载转矩将增大,M1的电磁 转矩和负载转矩都减少。若设定^鲠,即n。,<n咖 则Ml工作在发电状态,M2工作在电动状态,M1为 M2的负载,同样可通过改变频差来改变负载转矩的
Abstract:The structure of the speed-regulating experimental system for double AC motors and the control methods of the system were introduced.And the application of the STM32 mierocontroller hardware module design WaS decribed and programmed to achieve sinsle motor system of the space voltage vector control and dual—drive frequency difference control technology method.Compared with traditional speed control systems,the system has hish efficiency and is flexible energy saving and low—cost.
基于STM32单片机的直流电机调速系统设计
P1
VCC5 1
Right_A 2
Right_B 3
4
右光电码盘
图 4 测速模块的电路设计
3 系统软件设计
当把直流电机闭环控制所需的程序编译没有错误,利用keil4 编译环境把程序通过J-LINK下载到STM32单片机。闭合直流电机 闭环控制模块的电源开关,电机开始转动,STM32单片机隔50ms采 集电机转速, 增量式P I D 运算, 调剂P W M 波的占空比。不断地调试 PID参数,可以使电机的转速达到给定值。系统的主程序是一个循 环程序,其流程图如图5所示。
参考文献
[1]刘长青,李迎光,等.基于特征的飞机结构件数控加工工时预测模 型[J].计算机集成制造系统,2011,17(10):2156-2162. [2]王殿龙,陈劲枰,等.基于 BP 神经网络的切削力预报[J].大连理工 大学学报,2005,45(06):814-818. [3]FatihCamci,R.B.C.Health-State Estimation and Prognostics in Machining Processes.IEEE Transactions on Automation Science and Engineering,2010,7(3):581-597.
MC33886
IN22 VCC5
OUT22
+ C16 33nF
OUT21
- A +
B2 Motor Servo
OUT22
P?
VCC5 Right_A Right_B
1 2 3
4
右光电码盘
图 3 直流电机 H 桥驱动电路图 2.3 电机转速检测模块电路设计
现在对电机转速测量应用较多的装置为光电码盘。它的基本测
基于STM32的直流电机PID调速系统设计
基于STM32的直流电机PID调速系统设计雷慧杰【期刊名称】《现代电子技术》【年(卷),期】2016(039)008【摘要】The DC motor speed control system based on MCU was designed. The system takes the microcontroller STM32 based on ARM Cortex⁃M3 as its core. Its PWM control signal is generated with software. The incremental PID algorithm is adopt⁃ed to control starting,braking,positive inversion and speed regulation of DC motors. The running information of the motors can be monitored in real time on the simple and friendly interface of the upper computer. Practical result shows that the system has small steady state error,high control precision,fast response,low energy consumption and high efficiency,and has a certain reference for the research of upper limb rehabilitation robot.%设计一种基于单片机的直流电机调速系统,该系统以基于ARM Cortex⁃M3内核的STM32微控制器为核心,利用软件产生PWM控制信号,采用增量式PID算法控制直流电机的起动、制动、正反转和速度调节,简单友好的上位机界面可实时监测电机的各种运行信息。
基于STM32微控制器的交流电机变频调速试验系统

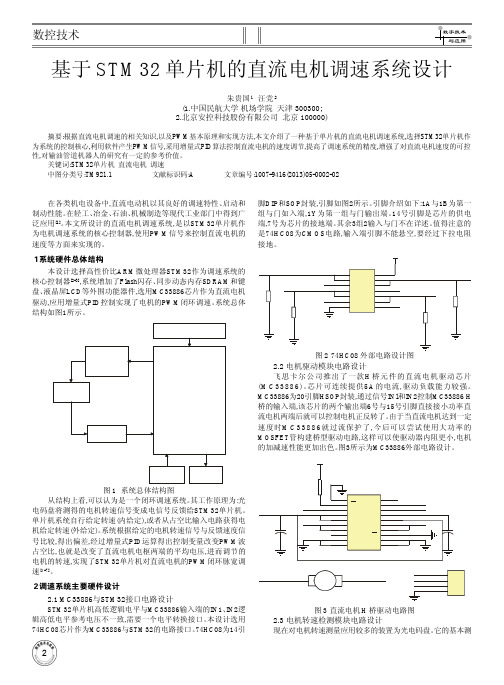
第19卷第6期茂名学院学报Vol.19No.6 2009年12月JOURNAL OF MAOMING UNI VERSI TY Dec.2009基于STM32微控制器的交流电机变频调速试验系统*金来专1,2,陈政石2,李铁鹰1(1.太原理工大学信息工程学院,山西太原030024;2.茂名学院计算机与电子信息学院,广东茂名525000)摘要:交流电动机的变频调速系统是各种调速系统中最为优越的一种电力拖动系统,它和其它的调速系统相比,具有良好的调速性能和节能效果。
采用S TM32微控制器结合空间矢量PWM技术(SVPW M)来控制交流电机的变频调速更具有安全、低成本、高性能的优势。
关键词:S TM32;交流电机;SVPWM中图分类号:TM921.51文献标识码:A文章编号:1671-6590(2009)06-0025-040引言交流电动机PWM变频调速控制技术的发展经历了一个不断创新和完善的过程。
随着工业自动化的发展,人们对电机传动控制系统精度、性能的要求越来越高,催生了智能化功率模块(IPM)和空间矢量脉宽调制(SVPWM)技术。
IPM模块和SVPW M技术以其结构简单、效率高、开关频率高、易于数字化实现、和转矩脉动小等特点极大地改善了变频电源和电机传动的控制性能,因而使得现代变频调速技术在广大的传动控制领域获得了广泛推广应用。
现代工业变频器具有的调速精细、安全节能等优越的电机调速性能,但是价格昂贵。
为了适应广大实验、教学应用领域对低成本交流电动机变频调速装置的广泛应用需求,意法半导体的STM32微控制器应运而生。
这款微控制器的低成本、高性能和面向用户开发的开放性等特点,使得它在电机变频调速实验应用方面体现出得天独厚的优势。
1S TM32微控制器意法半导体(ST)是第一家提供基于C ortex-M3内核的无传感器的磁场定向电机控制解决方案的厂商。
其生产的STM32的内核和专用电机控制外设都有充足的处理能力来优化驱动器的性能,以最小化系统总体成本。
基于STM32的交流传动控制系统设计

%绪论 如今生产生活中交流电机的使用已经远远超过了直流电 机而在交流电机中由于转子旋转的速度与旋转磁场的转速不 同分成了异步电动机和同步步电动机 前者由于负载的转速 与输入电网的频率之比可以不为定值$ 它与后者相比内部结 构简单制造使用和维护方便运行可靠而且质量轻花费成 本低因此我们把交流异步电动机作为研究对象) "系统硬件总体设计 系统的主电路采用交2直2交变压型电路 该系统主电路主 要由整流滤波以及 #\I等部分组成 本文选择的控制部分也 是当今使用最为广泛的 ONI();$ 系列单片机可用来处理反 馈环节返回来的变量以及产生精确地 Ob\<I 波来驱动 #\I 模块总体框图如图 $ 所示
交变压变频 如图中间经过的是直流它采用的是大电容来进 行滤波操作 本系统采用的整流器是二极管最右侧输出的波 形接近正弦波
图 ( 主电路设计 )&3 #\I选择 在选用它时我们首先要考虑的是系统能正常运行 额定电压值计算 ^- #$&5^: ?$&5]53% ?4$%b 额定电流值计算 #- ?$&) f) "*"#= ?$&) f) ]$&5]槡) ]4 ?)%&(3 f((&'Q 该式中的为我们通常所说的安全裕量 *为所有电机的 过载倍数最终选择的 #\I型号为 \I5%DOQ$)% 该型号的最 大耐压为 $)%%b电流为 5%Q( &系统软件设计 大体分为两部分即首先是主程序设计它包括我们使用的 各模块的初始化以及使用的 IR^的各部分功能的初始化还 要加一个循环语句确保程序一直可以执行 其次另外一部分 是中断设计它的作用是在上一部分程序完成的基础上执行 各种矢量算法以及输出 Ob\<I波形来进行调制 #\I 当有 一些故障出现时也要进入中断服务函数处理或者运行新程序 使系统停止这些程序都是在 .Y/A5 下操作完成的 '结语 本文在深入学习了解交流变频调速控制方法的基础上设 计了一套基于 ONI() 和 #\I 模块的交流异步电机变频调速控 制系统 介绍了主电路控制电路等部分电路的硬件设计以及 系统软件的设计并对整个系统做了仿真与测试验证了本系 统设计方案的可行性与优越性 参考文献 $ 常红军&交流传动系统 \OM/,Y与 IW7AWS 仿真技术的研 究 ! &河北工业大学)%%0&(& ) 任晓刚&永磁同步电机无速度传感器控制的研究 ! & 西南交通大学)%$3& ( 陈桂&基于 IQNVQU的异步电动机矢量控制系统的仿 真 E &电子机械程)%%(%5 3425%& 作者简介李帅男$''%2 男汉族吉林梅河口人硕士 助教研究方向电机\VR电力电子单片机
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于STM32微控制器的交流电机电磁调速系统
作者:马毅飞何明星张源
来源:《科技创新与应用》2013年第28期
摘要:介绍了一种新型的、由STM32微控制器和嵌入式操作系统RT-Thread及相应的软件实现的交流电机电磁调速控制系统。
着重介绍了该调速控制系统的工作原理、硬件中的电源系统、传感器系统、主控制系统、通信系统及软件中的PID算法程序和RT-Thread操作系统。
关键词:STM32;交流电机;电磁调速;RT-Thread
引言
电磁调速电机是一种恒转矩交流无级变速电动机,自面世以来,已有40年的历史。
由于它具备结构简单、运行可靠、价格低廉、调速范围宽、启动转矩大、速度调节平滑等优点,在生产实践中得到了广泛的应用。
近年来,随着电子技术的发展,用新的控制系统改变调速性能,为电磁调速技术带来了新的生机。
本文针对电磁调速方式,设计了一种以STM32微控制器为核心的交流电机调速系统。
1 STM32微控制器
STM32微控制器采用了ARM公司的Cortex-M3内核,该内核集高性能、低功耗、低成本于一体,同时可以满足电机控制系统对微控制器须具备卓越的实时响应、逻辑处理功能和优异的控制性能的要求。
基于Harvard架构,该32位RISC采用Thumb2指令集,提供16位和32位指令。
对比纯32位代码,该指令集能够大幅提高代码密度,同时保留原有ARM7指令集的多数优点(附加优化的乘加运算和硬件除法指令)[1]。
为保证低功耗应用的要求,STM32的内核电压是1.8V,外设电压是3.3V,可选择睡眠模式、待机模式。
STM32微控制器的外围控制非常丰富:最大256 KB FLASH、最大20KB RAM、80个快速I/O口、16通道的12位A/D 转换器、7个定时器(包含一个RTC)、3个智能IC卡接口(与UART复用)、2个SPI接口、2个I2C接口、USB 2.0接口、支持通过UART实现IAP功能、IC卡读写器[2]。
意法半导体为STM32用户免费提供2.0版电机控制软件库,用户可以在Keil、IAR工具厂商的STM32设计环境下进行C语言编程。
2 系统工作原理
基于STM32微控制器的交流电机电磁调速系统原理图如图1所示。
图1 控制系统原理图
电磁调速异步电动机是由普通鼠笼式异步电动机、电磁滑差离合器和电气控制装置三部分组成。
异步电机作为原动机使用,当它旋转时带动离合器的电枢一起旋转,电气控制装置是提供滑差离合器励磁线圈励磁电流的装置。
电磁滑差离合器包括电枢、磁极和励磁线圈三部分。
电枢为铸钢制成的圆筒形结构,它与鼠笼式异步电动机的转轴相连接,称主动部分;磁极做成爪形结构,装在负载轴上,称从动部分。
主动部分和从动部分在机械上无任何联系。
当励磁线圈通过电流时产生磁场,爪形结构便形成很多对磁极。
此时若电枢被鼠笼式异步电动机拖着旋转,那么它便切割磁场产生感应电动势为
E=BLR(ω1-ω2)(1)
其中,B为磁感应强度,L为电枢有效长度,R为电枢有效半径,ω1为原动机转速,ω2为磁极转速。
该电动势在电枢上引起涡流,假设每个磁极的等效阻抗为Zp,则涡流电流为
i=E/Zp=BLR(ω1-ω2)/Zp (2)
涡流电流与旋转磁极的磁通相互作用产生电动力。
设P为电枢极对数,在此电动力作用下,电枢切线方向会产生一个电磁力矩
M=FR=BiLR=B2L2R2P(ω1-ω2)/Zp (3)
磁极跟着电枢同方向旋转,磁极的转速就是电磁调速电动机的输出转速,磁极转速的大小取决于磁极电磁转矩的大小,也就是取决于励磁电流的大小[3]。
STM32微控制器作为电气控制装置的CPU,通过轴角编码器获取滑差离合器磁极的转速,经过PID运算,将控制电流通过D/A输出,再经驱动电路控制滑差离合器的励磁线圈的直流电流。
在一定负载下,励磁电流的大小决定输出转速的高低,励磁电流越大转速就越高,励磁电流越小转速就越低。
通过改变励磁线圈的电流,就可达到改变输出转速高低的目的[4]。
3 系统软硬件设计
3.1 硬件设计
系统硬件由电源系统、传感器系统、主控制系统和通信系统4个部分组成,如图2所示。
图2 控制系统硬件框图
(1)电源系统。
STM32微控制器的内核电压是3.3V,我们将外部开关电源所提供的24V 电动机驱动电源通过恒功率电源WRFD24S05-3W降压为5V,再通过线性稳压器AS1117-3.3降压到3.3V给控制系统供电。
电源系统原理如图3所示。
图3 电源系统原理图
(2)传感器系统。
传感器系统中的关键部分是通过轴角编码器获取电动机的运行状态和运行速度。
五线制光电式轴角编码器有两根电源线和三根脉冲线(A相、B相、Z相)。
电源工作电压为+5V直流电源,A、B两相脉冲线用作判断电机的运动状态,Z相为零脉冲,用作计算电机转速。
(3)主控制系统。
主控制系统包括了控制回路和开关量的输入输出。
一种开关量输入是交流电机的启动信号,该信号为常开接点,当此信号闭合时,CPU会发出一个启动开关信号,启动电机;另一种开关量是电机温度的开关信号,该信号为常闭接点,当电机温度超过155°C时,开关打开。
为防止输出对输入信号的干扰,在开关量输入端需加装光电耦合器,电路图如图4所示。
同理,开光量输出也需要通过光电耦合器再加上驱动电路后带动继电器输出。
(4)通信系统。
通信能力较强是本系统的优势之一。
在通信系统部分,我们设计了一块专用通信的PCB板,CPU采用STM32系列的STM32F103VCT6。
通信板中包括了5个串口和1个以太网接口,5个串口其中一路RS232做串口调试电路用,一路MODBUS主站用于操作屏,一路MODBUS从站用于遥控器,一路CAN总线和一路RS485自由口。
3.2 软件设计
软件部分是在Keil uVision4环境下用C语言编写的,用以完成相应的硬件功能。
控制系统软件框图如图5所示。
程序分应用程序和操作系统两大部分,其中应用程序包括信号采集任务程序、PID算法程序、通信程序和外部中断服务程序,操作系统包括设备驱动和RT-Thread操作系统。
下面简单说明几个主要程序:
(1)PID算法程序。
PID算法程序是本系统的关键所在,也是难点所在,要使系统既能够快速跟踪响应,又要有较小的超调,具有良好的稳定性能。
该程序根据实际速度值、速度给定值及电机励磁电流3个参数进行运算,运算后的数据经D/A转换器,再经驱动电路送到励磁线圈,控制励磁电流,从而改变电机转速。
其控制算法采用速度反馈、电流反馈双闭环PID控制。
PID算法程序流程图如图6所示。
(2)RT-Thread操作系统。
在控制系统软件中,我们移植了RT-Thread操作系统,它是一款由国内RT-Thread工作室开发的开源实时操作系统。
RT-Thread是一款追求小型风格的实时操作系统:小型、实时、可剪裁。
小型:RT-Thread核心能够小到2.5K ROM,1K RAM;实
时:线程调度核心是完全bitmap方式,计算时间是完全固定的;可剪裁性:配置文件rtconfig.h包含多种选项,对Kernel细节进行精细调整,对各种组件(文件系统,使用EFSL、ELM FatFs、网络协议栈、finsh shell、图形用户界面GUI)进行可选配置[5]。
RT-Thread操作系统在STM32上的移植是基于RealView MDK开发环境进行移植的,移
植默认参数包括:线程优先级支持(32优先级),内核对象支持命名(4字符),操作系统节拍单位(10毫秒),支持钩子函数,支持信号量、互斥锁,支持事件、邮箱、消息队列,支
持内存池,以及支持RT-Thread自带的动态堆内存分配器。
我们在移植RT-Thread到STM32
微控制器时,主要是在上下文切换、中断处理、堆栈初始化等相关源文件上进行修改。
4 结束语
基于STM32微控制器的交流电机电磁调速系统能够很好地完成对交流电机的控制要求,并且具有较强的通讯能力和数据计算能力,适合无人化工作面系统集成信息化的需要,在速度反馈和电流反馈的基础上进行PID控制,使系统控制平滑有效。
该方案可完全满足交流电机的控制需要,操作简单、运行可靠、良好的调速性能和较低的成本使其将会在交流电机调速系统上得到更加广泛的应用。
参考文献
[1]意法半导体.基于STM32微控制器的先进电机控制方法[J].产业技术,2011(3):84-85.
[2]金来专,陈政石,李铁鹰.基于STM32微控制器的交流电机变频调速试验系统[J].茂名
学院学报,2009,19(6):25-28.
[3]刘建功,王汝琳.采煤机电磁调速技术研究[J].中国矿业大学学报,2005,33(6):107-111.
[4]李永东.交流电机数字控制系统[M].北京:机械工业出版社,2002.
[5]RT-Thread工作室.RT-Thread实时操作系统编程指南[DB/OL].http://www.rt-
/node/4。