基于DSP芯片的汽车定位防盗系统设计
基于DSP的导航计算机信息处理系统的设计与研究
性导航数据 , 利用 F82的 e A 21 C N模块实现导航计 算机和主控计算机之间的双 向数据通信。C N接 A 口电路设计 如 图 2所示 。
3 系统软件设计
导航信息处理系统软件开发选择德州仪器 r 提 兀 供的 C S 33 CV . 集成开发环境和 X S1 仿真器;A D 50 CN 总线通讯测试软件的开发选择微软 的 V + .。 C+ 60
2 1 耳第1 01 1 期
中图分类 号:N 1. T 9 17 文献标 识码 : A 文章编号:0 9— 5 2 2 1 ) 1 0 5 o 10 2 5 (0 1 1 — 0 4一 4
基 于 D P的 导航 计算 机 信 息处 理 系统 的设计 与研 究 S
涂 坤,曾连荪
( 上海海事大学信息工程学院 ,上海 20 3 ) 0 15
摘 要 :为 了采集到高精度、低差错率的导航参数,采用了高精度的 A D转换器件 A 6 7和 T Z D7 I 的 T 30 2 1 实现 对 微 机 械 陀 螺 、加 速 度 计 和 温 度 传 感 器 采 样 过 程 的控 制 , 同 时 利 用 MS2F 82来
T 30 2 1 MS2 F82的 e A C N模 块来 实现 与主控 计 算机 的数 据通 讯和地 面测试 。首 先介绍 了导航计 算机
11 导 航信息 处理 系统 设计 .
导航计 算机
(艟 3 02 1 ) T S 2 F 8 2 n C N AL
n
为采集高精度、 低差错率的导航参数 , 利用了高 精度的 A 67 D 7 将温度传感器、 陀螺仪和加速度计的 输出的模拟 信号转换 成数字 信号。T S2 F82 M 30 2 1 的 G I 口来 控 制 A 67采 样 过 程 , 时 利 用 PO D7 同 F82的 eA 21 C N模块、C 模块来实现与主控计算机 SI 和地面测试系统的通信。导航信息处理系统框图如
基于DSP的车辆检测系统的设计
关 键词
帧问差法 ; 边缘 检测 ; 形态学滤波 ; 交通参数提取
T 3 14 文 献 标 识 码 P9. A 文章 编 号 17 -3 1 2 1 )10 8 -4 6 24 2 (0 2 0 — 40 0
中图分类号
De i n o P— s d Ve c e De e to y t m sg f DS Ba e hi l t c i n S s e
l w, ug e tn h tti e h i ue i rhy o o ir to r c ia pp iai fo s g si g t a h st c n q s wo t fc nse a in f rp a tc la lc t n. o o Ke ywor s d i trfa fe e c t o n e — me di r n e me h d;e g ee to l f d e d tci n;mo p lgc lflei g;tafc pa a ee s e ta to r hoo ia trn i rfi r m tr x r cin
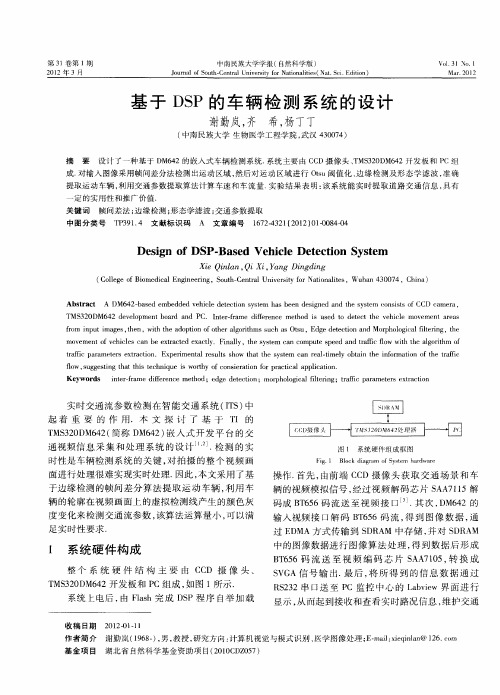
实 时交 通流 参 数 检测 在 智 能 交 通 系统 (T ) IS 中
起 着 重 要 的 作 用.本 文 探 讨 了 基 于 T 的 I
T 30 M 4 ( MS 2 D 6 2 简称 D 4 ) 入 式 开 发 平 台 的交 M6 2 嵌 通 视频 信 息 采 集 和处 理 系 统 的 设 计 ¨ 检 测 的 实 。. 时性是 车辆 检 测 系统 的关 键 , 拍 摄 的整个 视频 画 对 面进行 处 理很 难实 现实 时处 理 . 因此 , 文采用 了基 本
XeQ na , i iY n i dn i iln Q ,a g Dn i X g g
基于DSP的汽车防盗监控系统的设计

文 章 编 号 :0 9- 5 2 2 1 )5— 0 5—0 10 2 5 (0 2 0 0 5 4 中 图分 类号 :1 7 1P 7 2 文 献标 识码 : A
基 于 D P的汽 车 防 盗监 控 系统 的设 计 S
朱高 中
( 渭南师 范学 院物理与电气工程学 院 ,渭南 74 0 ) 100
c mb n st g t e n k st e a t t e t u cin c n b c iv d o i e o e ra d ma e h n i f f n t a e a h e e . h — h o
Ke wo d y r s: p l e;c nto ;c mmu ia in;p st n n oi c o rl o n c to o io ig i
t r s e n o mai n e o t t t e u lc e u t d p rme t T e e i p t a o e t e y t m o g a p t i fr t r p r o h p b i s c r y e a t n . h d sg h o i n us b v s se h
摘
要 :依 托 G S技 术 ,以 T M3 0 4 0为核 心 ,设 计 了基 于 D P的 汽 车防 盗监 控 系统 ,该 防 P S 2F2 S
盗监控 系统 包括 信号 采集 环 节、报 警 电路 系统 、视 频控 制 电路 和 通讯 系统 等 组成 。通 过 传 感 器 采集 到有 用信号 ,并把 信 号送到 D P 中央 处理 器 , 中央处 理 器 决 定是 否 启动 报 警命 令 ,G S 系 S P 统 负责 定位 汽 车的位 置 ,视频 控 制 系统 负责记 录 ,通讯 系统 各 种 信 息传 递 给 监 控 中心 和 车 主 , 以便 使监 控 中心和 车主 能及 时地 采 取 措施 ,把 所 掌握 信 息 报 告给 公 安 部 门。 文 中的 设计 正 是把
基于DSP的视觉导航智能车辆路径识别
1 智能车辆路径导航 的原理
1 1 基本原 理 .
根据地面设置 的条状导航路径和路面背景的图像灰度值 的差异 , 经过图像处理后便可识别出该导航
收 稿 日期 :0 1—1 21 I一1 5
基金项 目: 安徽科技学院人才引进 ( 稳定 ) 目( R 2 13 2 ; 项 Z C 0 10 ) 安徽科技学院重点建设学科车辆工程支持项 目( K K 0 0 — ) A X 2 12 5 。 作者简介 : 李进( 9 2 , , 18 一)男 安徽省蚌埠市人 , , 博士 讲师 , 主要从 事汽车电子与控制技术研究。
tp= + c h kr () 1
tn h
一k 盯
() 2
式中t 、 h t pi m分别为正负阈值。 为图像像素点的邻域均值, 盯为均方差; 为调整系数, k 具体见文献-。 9 J
4 8
安徽科 技学院学 报
2 3 最优 阈值计 算 .
使用最优阈值方法获取用于二值化路径 图像的阈值。与固定阈值方法相比, 最优阈值能够随着光照
凤阳 230 ) 3 10
( 安徽科技学院 机电与车辆工程学院 , 安徽 摘
要: 机器视觉由于具有多种优点, 在智能车辆导航 中得到广泛应 用。针对智能车辆路径导航直线模型
的缺点 , 出了改进方法和一整套处理流程 , 提 以及提高图像处理速度的措施 , 而保证 图像识别的鲁棒性 从
和 实时性 。 以德 州仪 器的 D C 4 E 6 3数 字信 号处理 器作 为 图像 采 集和 处 理芯 片, 智能 车辆 路 径识 别 系统 对
第2 6卷第 1 期
李
进
基 于 D P的视觉导航智能车辆路径 识别 S
4 7
一种基于DSP的SINS/GPS组合导航系统实现
漂移 。
状 态方 程为 :
X — F s X + G + W/s N () 2
系 统的 噪声 为 :
7 LS L 5N — J , , , , 硼 , 训 , , , j
1 引 言
目前 S NS GP I / S组 合 导 航 系 统 是 被 认 为 导 航
领域 最理 想 的组 合方 式 。捷 联 惯 导 系 统 ( I ) S NS 是
通过 测量 飞行 器 的角速 度 和加 速度 , 自动进 行 积 并
本 论文 将 基 于 TMS 2 F 8 2数 字 信 号 处 理 30 2 1 器 的平 台 , 使用 集 成惯 性 导航 I MU 元件 和 GP S接 收机 , 分别 建立 T 3 0 2 1 字 信 号 处理 器 与 MS 2 F 8 2数 I 单 元和 GP MU S单元 的通 信 , 架 出 一套 组 合 导 构
() 1
本 系统采 用 u lx公 司的 L A一 bo E 5型 G S接 收 P 模 块 。它是低 价 位 、 靠性 高 、 位 精 度 较 高 和低 可 定 功耗 的 1 2通道 接收机 , 以提供 丰 富 的导航 信息 , 可 并且 可 以由用户 定制所 需 的导航 信息 , 常适合 于 非
卡 尔 曼 滤 波器 取 S NS输 出的 导 航 参 数 的误 I 差作 为组 合导 航 的状 态量 , 因此 SNS的误 差 方程 I 就 是组合 导航 系统状 态方 程 的主要组成 部分 。 选择惯 性 导航系 统 的 3个位 置 误 差分 量 、 3个
速度 误差分 量 和 3个姿 态角误 差 分量 , 同时对 它 的 有色 噪声进 行扩 展 , 陀螺仪 和加 速度 计 的误差 作 将 为状 态分量 。
车辆定位防盗系统设计与实现
车辆定位防盗系统设计与实现摘要:经济的高速发展促进了人们生活水平的提高,汽车作为人们日常中的代步工具,伴随生活经济水平的提高也在不断的增多,汽车数量的持续增长,伴随而来的车辆被盗事件也在频繁的发生。
传统的车辆防盗产品,功能单一,技术落后,虽也具备声光报警功能,但防盗功能有限,特别是车主远离后,或者车辆停放位置无人时,声光报警功能显得非常的无力,这时就需要一种具有多功能、远程监控报警防盗系统的设计。
本文设计的车辆防盗系统主要功能就是利用GPS技术和GSM网络通信技术提供一种移动远程车辆报警定位防盗系统。
本文设计的车位定位防盗系统采用STM32F103C8T6单片机为控制核心的定位防盗系统,主要是利用GPS来实时的获取当前车辆的经纬度位置信息,并通过GSM网络发送报警信息和经纬度信息到车主的手机上,车主可通过手机发送控制指令来控制当前车辆的工作状态。
关键词:GPS, GSM, 震动传感器, 手机控制概述车辆定位防盗系统是通过STM32单片机作为控制端,震动传感器检测到异常,通过远程通信子系统把车辆的报警信息用短信的形式通知车主,车主收到短信回复相应短信内容,系统收到短信读取并解析,然后采取熄火、远程控制门锁等相应的措施,从而实现对被盗车辆移动的限制;再通过GSM网络将车辆的位置通过显示屏显示出经纬度的一种GPS跟踪定位设备。
1系统设计本设计使用STM32F103C8T6单片机为控制核心的定位防盗系统,且用户手机可以通过发送短信对车辆进行远程控制。
设计使用到了STM32F103C8T6单片机、传感器技术、GPS定位技术、GSM无线通信网络技术来完成。
1.1系统的整体方案设计实现系统的总体方案如图1所示。
图一1.2主控系统主控系统将选用STM32单片机中的STM32F103C8T6为处理器,STM32F103C8T6有48个IO口,内置64K字节的闪存存储空间,具有USB、CAN端口,以及7个定时器、2个模数转换器、9个通信端口,运行频率高达72MHz,因此处理能力很快,拥有周期乘法、硬件除法的存在,因此跑指令功能特别强。
基于DSP的SINS/GPS组合导航系统设计
DS 71 P6 3
DP AM R
_
A【:1] O 2
D[ :1 ] 0 5
_
E A[ : M 0
1] M 0 1E D[:
n[ : 0
1] 0 2D[:
DP RA M
DP AM R WE
DP RAM OE
1]M_ 5E WE
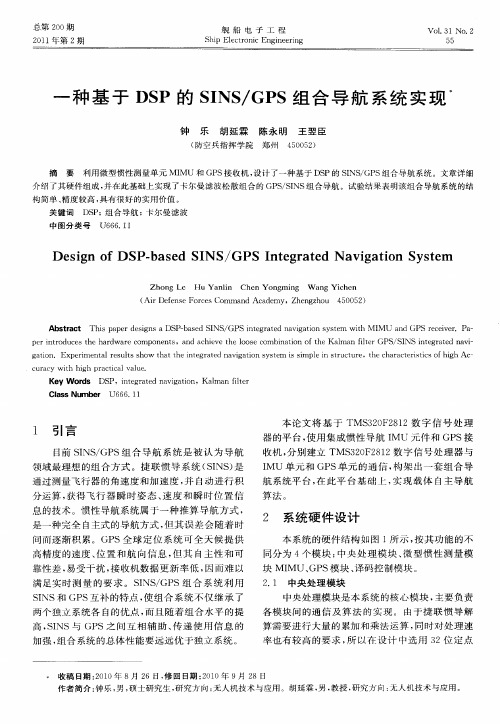
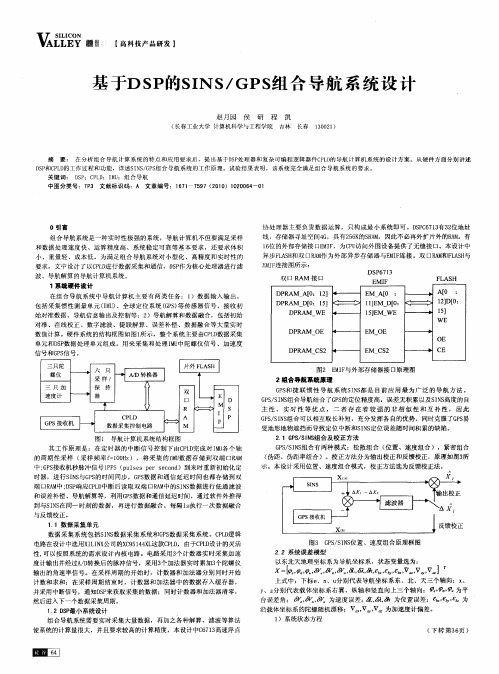
示 。本设 计采 用位 置 、速度组 合模 式 ,校正方 法选 为反 馈校 正法 。
11 数据采 集单 元 .
数据 采集 系 统 包括 SN 数据 采 集系 统 和G S IS P 数据 采 集 系统 。C L逻 辑 PD
电路在设 计 中选 用XL N公 司 的X9 14L I IX C 54X 这款 CL , 由于CL 设 计的灵 活 PD PD 性, 以按照 系 统 的需求 设计 内核 电路 。电路 采用 3 计 数器 实 时采 集加速 可 个 度计输 出并 经过A D / 转换后 的脉冲 信 号 ,采 用3 个加 法器 实 时累加3 陀螺 仪 个 图3 GS SN 位置 、速 度组 合原 理框 图 P/ IS 2 2系 统误差 模 型 以东北 天地理 坐标 系为 导航 坐标 系 ,状 态变 量选 为 :
E M oE
1] 5
WE
数值计 算 。硬件系 统 的结构框 图如 图 l 所示 ,整个 系 统主要 由C L数据 采集 PD 单元和 DP 据处 理单 元 组成 。用 来采 集和 处 理IU S数 M 中陀 螺仪信 号 、加 速度 信号和G S P 信号 。
OE DP RAM 2 CS E 2 M CS C E
0引言
协 处理 器主 要 负责 数据 运算 , 只构 成最 小 系统 即可 。D P 6 1 有3 位地 址 SC 73 2
基于GPRS和DSP的汽车智能防盗系统设计
3 控 制 系统
负 责判断并采集汽车 的位置信息 ,视频 系统 负责 记录 偷车人的声 音 和 相貌 以便给公安机关 破案提供 线索和证据 ,声光告 警系统则会发 出刺耳 的鸣叫和亮光 以惊 吓偷车人 使其放弃 偷车 。在本 防盗系统 中 通 讯系统起着重要 的作用 ,它负责把 G S P 系统搜集 到的汽车 定位信 息和视频 系统 采集到的声 音图像等信 息传送给 监控 中心和 车主 ,以 使监控 中心能 及时地采取措 施 ,如查 询汽车现 在的位置 ,切断汽车 油路等 。本设 计正是把 以上 的系统有机 地结合 在一起而使 防盗功能
( ) 频设 备 。当任何 一种报 警信 号产生 时该 设 备将会 披启 1 视 动 ,以进 行 全 程拍 摄 ,并将 拍 摄到 的照 片 或视 频 资 料 通过 G R PS Moe dm以短信 或视频 的形式发送至 用户手机 或车辆监 控中心联 网的 计算 机 上 ,便于 向 警方提 供盗 贼 的线 索 ,有利 于公 安机 关 尽快 破
得以实现 。
1 传感器系统
当车 内出现火 灾或有人非 法打开车 门等情况 时 ,传 感器将信号 送给控制系统 (S 系统) DP ,该系统进行数据 判断 ,处理等操作后 决定 是否发短消息 、( 含报警信息和汽车位置信息 等) 图片或视 频信息给用 户手机 或 者控 制 中心 。然 后 ,用 户或 者控制 中心可 以远 程控 制车 辆 ,也可以利用G R 通过互联 网进 行数据传输 ,还 可以不通过互联 PS 网而通过移 动的数 据中心进行数 据的转 发 。
根据 汽车被盗 时距离车 主远近 的不 同,该系统有使 用It t n me e 网 络和不需使用ht t n me网络两种工作模式 。 e ( )当车主 驾车外出 ,车辆停 放位置与车主比较近 时 ,防盗监 1 测系统只需通过 G R 网络发短消息给 用户的手机 ,报告给车主汽 车 PS 现 在 的安 全状 况 ,而不 需要 上Itnt 络 ,这 样用 户在 短时 间 内 ne e r 网
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
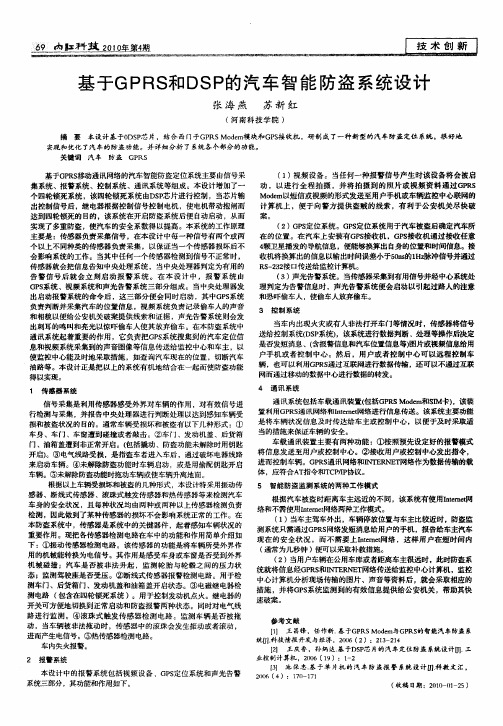
定位防盗功能的系统其结构框图如图所示。 在此系统中 &’( 对 于 B(’ 和 B’C 模 块 都 要 通 过 串 口 控 制 , B’C 模 块 与 &’( 本 检测控制 身的串口连接, 利用 D!)$ 扩一串口供 B(’ 模块使用。 及其辅助电路都可以直接使用 &’( 的 E F G 口。 :C’H!"I!*" 的 此时, 只需要在 控 制 器 寄 存 器 中 设 置 E F G 端口都具有复用功能, 使 E F G 做通用的 E F G 用即可。
图$
系统结构框图
以 &’( 为控制器的系统在开机运行初始化后, 将处于不停 地接收汽车位置信息的状态中,同时系统也在等待检测状态和 接受用户查询的消息中断。一旦有中断产生就会转移到相应的 中断子程序去处理。 若系统的设防信号无效, 则控制系统不进行 上述操作。 系统在设防信号有效后, &’( 主要循环处理 B(’ 接收机收 到的位置信息。 每一次有获得新电文标志, 则调用子程序进行电 文处理, 主要是分离电文中有用的信息如经纬度、 时间、 校验和 等,并把这些数据存入指定的存储空间。无线通信模块 :@H): 也是通过串口和 &’( 进行信息交换的, 在此串口接收是用中断 来取得使用控制器的权力。如有异常车况发生如设防情况下的 车门开起, 发动机启动等也将会向 &’( 发出中断请求。在软件 中把 :@H): 引起的中断设为低优先级, 即在车况发生异样 同 时 有车主主动查询消息,则 &’( 控 制 器 不 会 响 应 :@H): 的 中 断 申请。 若 &’( 控制器接收到中断申请, 并判断检测到是发动机启 动信号引起中断 (可以延时一定时间, 如 $""5, 在检测一次, 仍 然有效才确定为启动信号有效, 这样可以防止误操作) 。系统将 处理发动机启动中断服务子程序, 即将发送短消息给用户 (也可
-"5 网 络 和 控 制 器 之 间 的 信 息 交 换 利 用 了 65"),*8,9* 的 中 断系统。图 ) 给出了处理发动机启动的中断服务子程序流程图。
!
系统的软件设计 软件主要完成三个方面的任务: 初始化系统各个部分, 循环
图) 处理发动机启动的中断服务子程序流程图
处 理 -#" 接 收 到 的 电 文 信 息 ; !"# 控 制 器 与 67)$6 的 通 信 联 系, 实现人车之间的双向通信; 处理异常车况。这三方面的任务 在程序中是分两部分来完成的即主程序和中断处理。主程序主 要完成系统初始化和对 -#" 电文处理, 而串口工作和车况异常 的处理都是通过中断实现的。
Z
F"7;76M( H *T))J F"7;#G; H *TX*J F#N!N6N;G H *T(**J F;5G H *T((J
< < 使 "7; 脱离复位状态 < < "7; 中断为低优先级 < < 使能 :NG6 中断 Y;?6( 、 ;?6$
"
结束语 汽车定位防盗系统是一个非常复杂的系统,本文对系统的
《工业控制计算机》 !""# 年 $% 卷第 ! 期
$
基于 &’( 芯片的汽车定位防盗系统设计
&+,-./ 01 2340506-7+ (0,-4-0/-/. 8/9 :;+14<2.8-/,4 :+=;/070.> ?8,+9 0/ &’( @;-A
广东 广州 )$"*")) 王庆香 (广州中医药大学信息技术学院, 广东 广州 )$"""") 孙炳达 (广东技术师范学院,
目前各汽车厂家都在不断的改进防盗技术,尤其是随着微 电子技术的进步,汽车防盗技术已向着自动化、智能化方向发 展。汽车电子防盗装置, 具有质量轻、 占用空间小、 传感精度高、 处理速度快、 信息容量大等特点, 非法解除防盗装置锁技术难度 大, 其安全性较高。随着各种高性能传感器、 微电脑和卫星导航 技术在汽车和汽车运输管理上的应用,汽车智能化防盗技术也 应运而生。 汽车定位防盗系统是采用一种全新的定位概念,它成功地 依托 B(’ 系 统 与 B’C 通 讯 网 络 , 进行手机与汽车的智能联动 来实现定位与防盗。本文设计的系统具车辆定位、 实时监控、 远 程报警、 远程控制、 防盗反劫等多种功能; 且无声光噪音污染, 更 符合环保要求。通过手机接收基站的短信息和定位程序计算出 汽车的即时位置实现定位和实现跟踪。 在设防状态下, 如车辆受 震、 车门打开、 或车辆启动、 报警器将不受距离限制自动发出相 应的警报短信到车主的手机上,同时车辆还会发出声光报警信 号及时阻止偷盗。 如果确认车辆已经被盗, 监控中心能控制车辆 使其强行停车。
硬件和软件设计都给出了重点详细地分析。此系统是基于 !"# 技术利 用 -#" 和 -"5 研 究 汽 车 定 位 防 盗 系 统 , 实现了汽车导 航和防盗功能的结合。 参考文献
Hale Waihona Puke ( ,陈峰, 孙平, 赵义忠 [ 基于 -"5 短消息 的 -#" 车 辆 监 控 移 动 单 元 设 计 [ 电子工程师, (, ) ,**,
图, 主程序流程图
系统启动后首先要对相应的变量和模块进行初始化,初始 化采用子程序调用形式来完成可以增强程序的可读性。初始化 和主程序流程序图如图 , 所示。系统初始化主要包括以下几个 方面: 对 65"),*8,9* 的 初 始 化 如 : 时钟输出 () 7#: 工 作 方 式 、 方式、 中断系统初始化 (屏 蔽 中 断 ) 和 ; < = 口寄存器以及串口初 始化等; 定以及初始化变量如预置短消息, 设置位置数据结构等; ,) 各模块的初始化: 网络情 况 , 设置 )) 67)$6 如检查 ";5 卡、 短 消 息 格 式 扩 展 串 口 >,$( 如 设 置 工 作 方 式 和 波 特 率 ; -#" 模 块如设置协议方式工作频率; 开中断进入主程序; 9) 中断的应用。 $) 本系统中固有的和扩展的端口引起的中断分别属于可屏蔽 的内部硬件中断和外部硬件中断。高优先级的外部引脚中断和串 行通信 "7; 引发的接收中断触发 ;?6(:低优先级的外部引脚中 断和串行通信 "7; 引发的接收中断触发 ;?6$ 在本系统中,监测
-[!0\010’3\&+R ][-3\A^3Q31&+R 7[531\&+R ][#\0’2_3+R "[ "&A423+R N[6+313Q&B&+R;’20‘\32&’‘ -;"R -#" 3’B -"5 20./’AQA‘&0+ ^A\ 2/0 0^^0.2&@0 %3’3‘0%0’2 A^ 3%P4Q3’.0+R 7A%a420\+R O’@&b \A’%0’2 3’B :\P3’ "c+20%+[ C,**(D,$
[收稿日期: ,**$[W[,$ ]
地接收汽车位置信息的状态中,同时系统也在等待检测状态和 接受用户查询的消息中断。一旦有中断产生就会转移到相应的 中断子程序去处理。 若系统的设防信号无效, 则控制系统不进行 上述操作。 本系统以 &’( 为控制器,由 B(’ 模 块 、 B’C 无 线 通 信 模 块 以 及 必 要 的 辅 助 电 路 组 成 一 个 基 于 B(’ 、 B’C 的 具 有 汽 车
程序的设计采用混 合 语 言 编 程 , 这样可充分利用 7 语言和 汇编语言的各自的优点 (一方面提高程序的可读性, 另一方面节 约程序占用空间和提高执行速度) 。下面列出了 !"# 初始化的 子程序。
@A&B &’&2!"#CD E F;8G H *I8888J F7K7G( H *I**LL F7K7G* H *I**7) H 7#:7MK < ,R F"S"7G H *T9*>* FU!7G H *TO>J F"7;77G H *T**)VJ
!
系统的结构与功能 本系统以 &’( 为控制器,由 B(’ 模 块 、 B’C 无 线 通 信 模
块 以 及 必 要 的 辅 助 电 路 组 成 一 个 基 于 B(’ 、 B’C 的 具 有 汽 车 定位防盗功能的系统,其结构框图如图 $ 所示。在此系统中
&’( 对 于 B(’ 和 B’C 模 块 都 要 通 过 串 口 控 制 , B’C 模 块 与 &’( 本身的串口连接,利用 D!)$ 扩一串 口 供 B(’ 模 块 使 用 。 检 测 控 制 及 其 辅 助 电 路 都 可 以 直 接 使 用 &’( 的 E F G 口 。 此时, 只需要在控制 :C’H!"I!*" 的 E F G 端口都具有复用功能, 器寄存器中设置使 E F G 做通用的 E F G 用即可。 以 &’( 为控制器的系统在开机运行初始化后, 将处于不停
字符
< < 清除中断标志 < < 外部晶振 < < 7MK5N! H #MM O’3PQ0R "S"7MK < < 7MK=:6 H "S"7MK < < 不使能看门狗 不使能奇偶校验, < < ( 个停止位, >位
F"7;76M( H *T()J < < 使能接收和发送, "MOO# H * 禁 止 休眠方式, < < 禁止接收错误中断, 6TUNKO H* 即没有选定的发送特征 F"7;76M, H *T)J < < 使能接收和发送中断 F"7;MLN:! H *T**>( < < 波特率 H WX**L < "