功能指令说明(FANUC 0i-PMC)
Fanuc 0i MC法兰克操作

法兰克操作Fanuc 0i MC 标准操作手册警告和注意特别警告:机床在接通电源,启动过程中,还未完全启动时,严禁操作机床的面板按钮。
否则可能会出现机床数据丢失。
比如(机床所有参数、厂家程序、刀补等全部丢失)1.零件加工前,一定要首先检查机床的正常运行。
加工前,一定要通过试车保证机床正确工作,例如在机床上不装工件和刀具时利用单程序段、进给倍率或机床锁住等检查机床的正确运行。
如果未能确认机床动作的正确性,机床有可能发生误动作,从而引起工件或机床本身的损坏,甚至伤及用户。
注:机床锁住、Z轴锁住、空运行、辅助功能锁住。
必须保证在关闭状态。
否则发生误动作,机床碰撞。
2.操作机床之前,请仔细地检查输入的数据。
如果指定了不正确的数据操作机床,机床有可能发生误动作,从而引起工件或机床本身的损坏,甚至伤及用户。
3.确保指定的进给速度与想要进行的机床操作相适应。
通常,每一台机床都有最大许可进给速度。
适合的进给速度根据不同的操作而变化。
请参阅机床厂家提供的说明书来确定最大的进给速度。
如果没有按正确的速度进行操作,机床有可能发生误动作,从而引起工件或机床本身的损坏,甚至伤及用户。
4.当使用刀具补偿功能时,请仔细检查补偿方向和补偿量。
如果指定了不正确的数据操作机床,机床有可能发生误动作,从而引起工件或机床本身的损坏,甚至伤及用户。
5. CNC和PMC的参数都是机床厂家设置的,通常不需要修改。
当必须修改参数的时候,请确保改动参数之前对参数的功能有深入全面的了解。
如果不能对参数进行正确的设置,机床有可能发生误动作,从而引起工件或机床本身的损坏,甚至伤及用户。
6.在机床通电后,CNC单元尚未出现位置显示或报警画面之前,请不要碰MDI面板上的任何键。
MDI面板上的有些键专门用于维护和特殊的操作。
按下这其中的任何键,可能使CNC 装置处于非正常状态。
在这种状态下启动机床,有可能引起机床的误动作。
7.随CNC单元提供的操作说明书和编程说明书对机床的功能进行了完整的叙述,包括各种选择功能。
FANUCPMC常用功能指令

FANUCPMC常⽤功能指令在编制顺序程序(梯形图)时,有些功能,如控制时间、控制捷径换⼑时的旋转,很难⽤只执⾏位运算的基本指令来实现。
功能指令应运⽽⽣,它是为了⽅便⽤户编制复杂功能⽽使⽤的PMC程序指令。
功能指令都是⼀些⼦程序(subprogram),应⽤功能指令就是调⽤相应的⼦程序。
功能指令不能⽤纯继电器符号表⽰,基本格式由控制条件、指令、参数、输出组成。
▲功能指令基本格式FANUC PMC常⽤功能指令END1第1级顺序程序结束 [SUB1]该功能指令与PMC程序结构相关。
▲ PMC程序结构END2第2级顺序程序结束 [SUB2]该功能指令与END1⼀样,与PMC程序结构相关。
TMR定时器 [SUB3]TMR表⽰timer,定时器。
▲定时器⼯作原理CTR计数器 [SUB5]是进⾏加减计数的环形计数器(counter)。
▲计数器⼯作原理举例:DECB⼆进制译码 [SUB25]DECB表⽰binary decoding,⼆进制译码,B表⽰⼆进制。
举例:MOVE逻辑乘后数据传送 [SUB8]CODB⼆进制代码转换 [SUB27]CODB表⽰binary coding,⼆进制代码转换,B表⽰⼆进制。
举例:DCNV数据变换 [SUB14]DCNV表⽰data conversion,数据变换。
举例:ROT回转控制 [SUB6]ROT表⽰rotation,回转。
举例:COMP⼤⼩⽐较 [SUB15]COMP表⽰comparison,⽐较。
COIN⼀致性判断 [SUB16]COIN表⽰coincidence,⼀致性判断。
NUMEB⼆进制常数定义 [SUB40]NUMEB表⽰binary number,B表⽰⼆进制。
DISPB信息显⽰ [SUB41]DISPB表⽰binary display,B表⽰⼆进制。
请投票选择答案(教学设计/汤彩萍)1. 编制急停梯形图并调试(END1)2. 编制故障灯闪烁梯形图并调试(TMR)3. 编制⼯件计数梯形图并调试(CTR)提⽰:选⽤FANUC PMC 12项操作之操作1、3、4、11。
FANUC0i系列PMC参数的输入
FANUC0i系列PMC参数的输入
FANUC 0i系列PMC参数的输入
―――郭方林
一.准备:
1.电脑(PC)
2.RS232C数据线。
在关机状态联机后开机。
二.操作:
1.按下紧急停止按钮。
将程序保护键处于OFF状态
2.按功能键,再按〔SETING〕软键。
设定〔参数写入=1〕
3.按功能键,再按〔PMC〕软键。
按〔PMCPRM〕软键,再按〔KEEPRL〕软键。
将〔K17#1〕设为“1”
4.选择EDIT(编辑)方式。
5. 按功能键,再按〔PMC〕软键,再按〔〕。
按软键
〔I/O〕,用光标移动键移动光标在〔CANNEL〕项输入〔1〕,在〔DEVICE〕中,按〔FDCAS〕,
6。
按〔〕,再按〔SPEED〕设定设定有关I/O的参数。
BAUD RATE=3
PARITY=0
STOP BOIT=1
7.按〔〕在〔FUNCTION〕中,按〔READ〕软键。
8.在PC上打开传输软件V24并设定好将要传的文件准备好。
9. 在NC上按〔EXEC〕软键,再按〔YES〕,开始PMC参数的输入。
在PC上敲回车开始PMC参数的输出。
完成数据读取后关机再开.将设定画面的〔参数写入〕恢复到“0”。
FANUC 0I PMC 编程实例
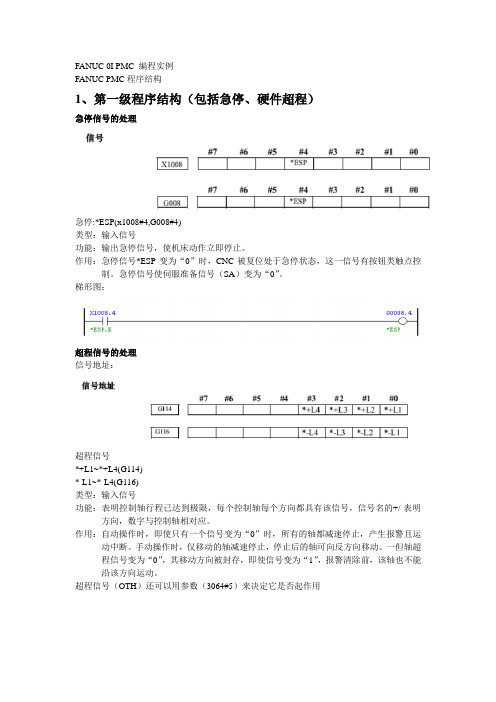
FANUC 0I PMC 编程实例FANUC PMC程序结构1、第一级程序结构(包括急停、硬件超程)急停信号的处理急停:*ESP(x1008#4,G008#4)类型:输入信号功能:输出急停信号,使机床动作立即停止。
作用:急停信号*ESP变为“0”时,CNC被复位处于急停状态,这一信号有按钮类触点控制。
急停信号使伺服准备信号(SA)变为“0”。
梯形图:超程信号的处理信号地址:超程信号*+L1~*+L4(G114)*-L1~*-L4(G116)类型:输入信号功能:表明控制轴行程已达到极限,每个控制轴每个方向都具有该信号,信号名的+/-表明方向,数字与控制轴相对应。
作用:自动操作时,即使只有一个信号变为“0”时,所有的轴都减速停止,产生报警且运动中断。
手动操作时,仅移动的轴减速停止,停止后的轴可向反方向移动。
一但轴超程信号变为“0”,其移动方向被封存,即使信号变为“1”,报警清除前,该轴也不能沿该方向运动。
超程信号(OTH)还可以用参数(3064#5)来决定它是否起作用梯形图:在顺序程序中必须给出一次急停、超程梯形图,可在第一级程序末尾,或当没有第一级程序时,排在第二级程序开头。
第二级程序包括:准备、模式选择、JOG、HNDL、REF、EDIT、MEMORY、MFNC、SFNC、TFNC、OTHER。
一、准备信号处理开机脉冲、CNC就绪信号、伺服就绪信号、复位信号、报警信号1、开机脉冲指令:2、CNC就绪信号[MA(F001#7)]类别:输出信号功能:CNC就绪信号,表明CNC已经就绪。
作用:CNC就绪后,该信号设为1。
通常通电后数秒钟内置为1。
如果系统出现报警,信号为0。
执行急停或类似操作时,该信号保持为1。
信号地址:梯形图:3、伺服就绪信号[SA(F000#6)]类别:输出信号功能:伺服系统就绪后,SA信号变为1。
作用:对于带制动器的轴,输出此信号时解除制动,不输出此信号时,表示制动。
信号地址:梯形图:4、复位信号(F1.1:RST)在下列情况下,CNC被复位且进入复位状态。
fanuc数控车床系统0iTC操作说明书
(a)用翻页键或光标移动键,显示需要的参数页面。
(b)从键盘输入想显示的参数号,然后按软键[NO.检索]。可以显 示指定的参数所在页面。光标在指定的参数位臵上闪动。
项目六
FANUC数控系统
项目六 FANUC数控系统
2、MDI方式设定参数
(1)将NC臵于MDI方式下 (2)按下急停按钮,使机床处于急停状态 (3)按以下步骤使参数处于可写状态
(6)系统具有HRV(高速矢量响应)功能,伺服增益设定比0MD系统高一倍, 理论上可使轮廓加工误差减少一半。
项目六
FANUC数控系统
二、FANUC数控系统的系列与特点
(7)机床运动轴的反向间隙,在快速移动或进给移动过程中由不同的间 隙补偿参数自动补偿。 (8)0i系统可预读12个程序段,比0MD系统多。
项目六
FANUC数控系统
二、FANUC数控系统的系列与特点
(1)FANUC 0i系统与FANUCl6/18/21等系统的结构相似,均为模块化结构。 其集成度较FANUC 0系统的集成度更高,因此0i控制单元的体积更小,便 于安装排布。 (2)采用全字符键盘,可用B类宏程序编程,使用方便。 (3)用户程序区容量比0MD系统大一倍,有利于较大程序的加工。 (4)使用编辑卡编写或修改梯形图,携带与操作都很方便。 (5)使用存储卡存储或输入机床参数、PMC程序以及加工程序,操作简单 方便。
四、各模块的LED状态显示
控制单元主板的LED状态显示位于控制单元主板的上方位臵 1、电源模块的LED显示 1)当未接通控制电源或控制电源出现异常时,如图6-16 2)电源模块未准备好。即主回路电源未接通、系统处于急停状态, 如图6-17
图6-16
图6-17
项目六
发那科0iC数控系统PMC
数 控 系 统
*ESP,*DECx等
G
X
F
Y
保持型继电器 •Counter (C) •Timer (T) •Keep relay (K) •Data table (D) •Variable table (D)
中间 继电
器
(R)
DI/DO
公共端 接收
驱动
机床
负
电
载源字符Fra bibliotek信号说明
X
输入信号(MT PMC)
PMC-SA1 PMC-SA3
A24 A249
PMC-SB7
C 计数器 地址号
- 76543210
C0
设定值
C1
计数器
C2
当前值
No.1
C3
PMC-SA1 PMC-SA3
C76 C77 C78 C79 C396 C397 C398 C399
设定值 当前值 设定值 当前值
计数器 No.20
计数器 No.100
C0 ~ C399 C5000 ~ C5199
K0 ~ K99 K900 ~ K919 D0 ~ D9999
T0 ~ T79
T0 ~ T499 T9000 ~ T9499
-
L1 ~ L9999
-
P1 ~ P512
P1 ~ P2000
序号
1 2 3
名称
FANUC
CNC
SYSTEM
FANUC Power
另一类为“顺序控制”。对数控机床来说,“顺序控制”是在数控机床 运行过程中,以CNC内部和机床各行程开关,传感器,按钮,继电器等的 开关量信号状态为条件,并按照预先规定的逻辑顺序对诸如主轴的起停, 换向,刀具的更换,工件的夹紧,松开,液压,冷却,润滑系统的运行等 进行的控制。与“数字控制”比较,“顺序控制”的信息主要是开关量信 号。
fanuc系统功能

0i系统功能介绍1、控制轨迹(路径)数(Controlled Path)CNC控制的进给伺服轴(进给)的组数。
加工时每组形成一条刀具轨迹(路径),各组可单独运动,也可同时协调运动。
2、控制轴数(Controlled Axes)CNC控制的进给伺服轴总数/每一轨迹。
3、同时控制轴数(Simultaneously Controlled Axes)每一轨迹同时插补的进给伺服轴数。
4、 PMC控制轴(Axis control by PMC)由PMC(可编程机床控制器)控制的进给伺服轴。
控制指令编在PMC的程序(梯形图)中,因此修改不便,故这种方法通常只用于移动量固定的进给轴控制。
5、 Cs轮廓控制(Cs contouring control)(T系列)车床系统中,主轴的回转位置(转角)控制不是用进给伺服电机而由FANUC主轴电机实现。
主轴的位置(角度)由装于主轴(不是主轴电机)上的高分辨率编码器检测,此时主轴是作为进给伺服轴工作,运动速度为:度/分,并可与其它进给轴一起插补,加工出轮廓曲线。
Cs轴控制必须使用FANUC的串行主轴电机,在主轴上要安装高分辨率的脉冲编码器,因此,用Cs轴进行主轴的定位精度要高。
6、斜轴控制(Angular Axis Control)对于T系列,即使实际的X坐标轴不垂直于Z坐标轴(对于M系列,Y轴不垂直于Z 轴),可以假设两轴相互垂直(T系列:X为斜轴,Z轴为垂直轴;M系列:Y为斜轴,Z轴为垂直轴),建立直角坐标系,以简化编程。
每个轴的运动根据倾斜角度自动控制。
该功能为0i系统的选择功能。
7、任意斜轴控制(Arbitrary Angular Axis Control)(T系列)斜轴控制中,通过设定参数,可以将任意轴指定为倾斜轴和垂直轴。
该功能为0i-TC系统的选择功能。
8、控制轴脱开(Controlled Axis Detach)指定某一进给伺服轴脱离CNC的控制而不产生系统报警。
FANUC Series 0i Mate-MC基本操作

FANUC Series 0i Mate-MC基本操作1: Hands on FANUC FANUC Series 0i Mate-MC 基本操作2: 内容提要第一部分基本操作操作面板 MDI 运行操作系统参数 PMC3: 操作面板5: 功能键6: 按此键显示位置画面按此键显示程序画面按此键显示刀偏 / 设定(SETTING) 画面按此键显示系统画面按此键显示信息画面按此键显示用户宏画面 ( 会话式宏画面 ) 或显示图形画面7: INSERT MI 0I PROG8: MDI 运行操作主轴正转操作 1 切换档位到 MDI 方式按下 MDI 键盘上的2 【 PROG 】按键在 MDI 键盘上按键输入主轴正 3 传的 M 指令( M03 )按下【 CYCLE START 】循 4 环启动按钮9: MDI 运行操作伺服轴移动操作按下【 POS 】键,观察当前 1 值 2 切换档位到 MDI 方式按下 MDI 键盘上的 3 【 PROG 】按键在 MDI 键盘上按键输入 X 轴从 4 0 到 10 的指令按下【 CYCLE START 】循 5 环启动按钮按下【 POS 】键,观察当前 6 值10: MDI TIPS 中途停止 MDI 继续 MDI 操作中途停止 MDI 操作按下【 FEED HOLD 】按下【 CYCLE START 】按下【 RESET 】键 MDI 运行结束,并进入复位状在机床运行中按下此按键,机床运动重新启动态。
当机床运动中执行了中途结则进给操作减速并最后停止束 MDI 的操作,机床运动会减速并停止 ?在机床在执行 M 、 S 或 T 指令时,操作在 M 、 S 和 T 执行完毕后停止11: 参数查询 1320 号参数 1 按下【 SYSTEM 】键按“返回菜单”软键,直到出 2 现“参数”软键 3 按下“参数”软键在 MDI 键盘上依次按键,键入 4 参数代号按“ NO 检索”软键,可调出 5 1320 号参数在参数画面中可即时做到参数 6 的类型12: 参数调出参数分类显示画面 1 在 MDI 键盘上按【 HELP 】键 2 按“ PARAM” 软键 3 按【翻页】键查看在参数画面中可即时做到参数 4 的类别13: 参数位型参数设定 1 切换档位到 MDI 方式按【 OFSET SETTING 】一次 2 或多次按光标键定位在“参数写入” 3 项使“参数写入”的设定 4 从“ 0”改为“ 1” 5 调出参数画面将光标定位于 0 号参数的第 0 6 位上 7 按“接通:1” 软键14: 参数字型参数设定将光标定位在 1320 号参数的 1 X 轴数据处键入10170 ,然后按“输入” 2 软键键入“-30” ,按“+输入” 3 软键 4 有的参数即时生效当出现“ 000 需切断电源”报 5 警时,说明参数须重新上电生效将“参数写入重新设定 6 为“ 0” ,使系统参数写保护15: PMC 查阅 PMC 按【 SYSTEM 】键调处系统 1 画面 2 按下“ PMC” 软键按下“ PMCLAD” (实时梯形 3 图画面)软键按下“ ADDRESS” 软件,切 4 换到地址显示再次按下“ SYMBOLE” 软键 5 ,切换到助记号显示16: PMC 信号状态监控在 PMC CONTROL SYSTEM 1 MENU 上按“ PMCDGN” 软键2 按下“ STATUS” 软键输入所要查阅的地址,按下“ 3 SEARCH” 软键17: PMC PMC 设定在 PMC CONTROL SYSTEM 1 MENU 上按“ PMCPRM” 软键 2 按下“ SETTING” 软键 3 修改 RAM WRITE ENABLE 4 修改 5 修改。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
张俊基笔记(功能指令说明)
FANUC oi系统——PMC-功能指令
编号缩写注释
SUB1END1第一级顺序程序结束
SUB2END2第二级顺序程序结束
SUB3TMR可变定时器,其设定的时间在屏幕的定时器画面中显示和设定
ACT=启动信号
SUB4DEC译码,当从译码地址读取的BCD码与译码指令中的给定值对比,一致输出“1”,不同输出“0”。
主要用于M或T功能的译码
SUB5CTR计数器,可作预置型,环型,加/减计数器,并可选择1或0作为初始值
CN0=初始值选择
UPDOWN=加/减计数选择
RST=复位
SUB6ROT旋转控制,用于回转控制,如刀架,旋转工作台等
RN0=转台的起始号1或0
BYT=位置数据的位数
DIR=是否执行旋转方向短路径选择
POS=选择操作条件
INC=选择位置数或步数
SUB7COD代码转换,将BCD代码转换为两位或四位BCD数字
SUB8MOVE逻辑乘数数据传送,将逻辑乘数与输入数据进行进行逻辑乘,结果输出到指定地址。
也可从输入地址中,八位信号中,排除不要的位数
SUB9COM公共线控制,控制直到公共结束指令(COME)范围内的线圈工作
SUB10JMP跳转,用梯形图程序的转移。
当执行时,跳至跳转结束指令(JMPE)而不执行与JMP指令之间的梯形图
SUB11PARI奇偶校验,对数据进行奇偶校验,检测到异常时输出报警
O.E=0时,偶数校验;O.E=1时,奇数校验
SUB14DCNV数据转换,将二进制码转换为BCD码或将BCD码转换为二进制码
CNV=0时,二进制码转换为BCD码;
NCV=1时,BCD码转换为二进制码
SUB15COMP数值大小判别,将输入值与比较值进行比较来判别大小。
输入值小于等于比较值,则输出为1
BYT=0时,处理数据为两位BCD;
BYT=1时,四位BCD
SUB16COIN一致性检测,检测输入值与比较值是否一致。
此指令只适用于BCD数据
SUB17DSCH数据检索,在数据表(D)中搜索指定的数据,如未找到指定数据,则输出为1 SUB18XMOV变址数据传送,读取或改写数据表(D)中的内容
RW=0时,读出;RW=1时,写入
SUB19ADD加法运算,BCD码两位或四位数据相加;
运算结果超过加数指定格式,输出置1
SUB20SUB减法运算,BCD码两位或四位数据相减;
运算结果为负,输出置1
SUB21MUL乘法运算,BCD码两位或四位数据相乘;
运算结果超过加数指定的格式,输出置1
SUB22DIV除法运算,BCD码两位或四位数据相除
除数为0,输出置1
SUB23NUME定义常数,用于指定常数
SUB24TMRB固定定时器,设定时间在编程时确定,不能通过定时器画面修改
SUB25DECB二进制译码,可对1,2或4个字节的二进制代码数据译码。
指定的八位连续数据之一与代码数据相同,则对应的输出数据位为1
SUB26ROTB二进制旋转控制,其处理的数据为二进制格式,除此之外,ROTB的编码与R OT 相同
数据格式指定=1字节,2字节或4字节
SUB27CODB二进制代码转换,其处理的数据为二进制格式,CODB与COD的功能基本一致SUB28MOVOR逻辑或后的数据传送,将输入数据与逻辑或数据进行逻辑或运算,然后将结果送到指定地址
SUB29COME公共线结束,指定公共线控制指令(COM)的控制范围。
必须与COM合用SUB30JMPE跳转结束,用于表示(JMP)跳转指令区域指定时的区域终点,必须与JMP合用
SIN=00 SUB31DCNVB扩展数据转换,将二进制码转换为BCD码或将BCD码转换为二进制码。
SIN=时,输入数据为正;
SIN=1时,输入数据为负
SUB32COMPB二进制数据大小判别,比较1,2和4字节的二进制数据之间的大小。
比较结果存放在寄存器R9000中
SUB33SFT寄存器移位,用于将二字节(16位)数据左移或右移1位。
当数据在最左方(第15位)左移或最右方(第0位)右移称出时,输出置1
DIR=0时,左移;DIR=1时,右移
CONT=状态指定
SUB34DSCHB二进制数据检索,与DSCH的差别在于,数据全部为二进制,数据表中的数据数目可以用地址指定,在程序写入ROM后依然可以改变表容量。
SUB35XMOVB二进制变址数据传送,与XMOV的差别在于,数据全部为二进制,数据表中的数据数目可以用地址指定,在程序写入ROM后依然可以改变表容量。
SUB36ADDB二进制加法运算,用于1,2和4字节二进制加法运算,运算信息可设定在运算结果寄存器(R9000)
运算结果超过加数指定格式,输出置1
SUB37SUBB二进制减法运算,用于1,2和4字节二进制减法运算,运算信息可设定在运算结果寄存器(R9000)
运算结果异常,输出置1
SUB38MULB二进制乘法运算,用于1,2和4字节二进制乘法运算,运算信息可设定在运算结果寄存器(R9000)
运算结果超过加数指定格式,输出置1
SUB39DIVB二进制除法运算,用于1,2和4字节二进制除法运算,运算信息可设定在运算结果寄存器(R9000)。
若除数为0,输出置1
SUB40NUMEB定义二进制常数用于定义1,2和4字节常数二进制常数。
将常数转换为二进制数据,存放在常数输出地址
SUB41DISPB信息显示,用于在屏幕上显示外部信息,如报警信息,操作提示等。
SUB42EXIN外部数据输入,用于外部数据输入(如外部刀具补尝,外部信息功能,外部程序呈检索等)
SUB43MOVB1个字节传送,从一个指定的源地址将1字节数据传送到一个指定的目标地址。
SUB44MOVW2个字节传送,从一个指定的源地址将2字节数据传送到一个指定的目标地址。
SUB45MOVN任意字节传送,从一个指定的源地址将任意字节数据传送到一个指定的目标地址。
SUB51WINDR读NC窗口数据,在PMC和NC之间经由窗口读取多种数据项
SUB52WINDW写NC窗口数据,在PMC和NC之间经由窗口写多种数据项
SUB53AXLCTL PMC控制,用于简化PMC控制轴的DI/DO信号的处理
SUB54TMRC定时器,设定时间可在任意地址设定。
地址的选择决定定时器为可变时间定时器或固定定时器
SUB55CTRC计数器,外理的是二进制数据,可作预置型,环型和加/减计数器用,初始值可作0,1选择
SUB57DIFU上升沿检测,在输入信号上升沿的扫描周期中将输出信号设置为1
SUB58DIFD下降沿检测,在输入信号下降沿的扫描周期中将输出信号设置为1
SUB59EOR异或,将地址1中的内容与常数(或地址2)中的内容相异或,将结果存到地址3中
SUB60AND逻辑与,将地址1中的内容与常数(或地址2)中的内容相与,将结果存到地址3中
SUB61OR逻辑或,将地址1中的内容与常数(或地址2)中的内容相或,将结果存到地址3中
SUB62NOT逻辑非,将地址1中内容的第一位取反,将结果存放在地址2中
SUB64END梯形图程序结束,表明梯形图程序的结束。
此指令放在梯形图程序的最后
SUB65CALL条件调用子程序,在CALL中指定子程序号,条件满足则跳转到子程序
SUB66CALLU无条件调用子程序,当指定了子程序时,则程序无条件跳转到子程序
SUB68JMPB标号跳转,将控制转移到设置在梯形图中标号后的程序
SUB69LBL标号,在梯形图中指定标号,为JMPB和JMPC指定跳转目标
SUB71SP子程序,用于生成一个子程序
SUB72SPE子程序结束,与功能指令SP一起使用。
当此功能指令被执行,返回到调用子程序的功能指令
SUB73JMPC标号跳转,将控制由子程序交回主程序,确保在主程序中有目的标号代码
SUB88MMC3R读MMC—Ⅲ窗口数据,在PMC与MMC之间读取MMC—Ⅲ数据。
当传送结束或发生错误时,输出置1
SUB89MMC3W写MMC—Ⅲ窗口数据,在PMC与MMC之间写MMC—Ⅲ数据。
当传送结束或发生错误时,输出置1
SUB98MMCWR读MMC窗口数据,在PMC与MMC之间读取多达32字节的数据。
当传送结束或发生错误时,输出置1
SUB99MMCWW写MMC窗口数据,在PMC与MMC之间写多达32字节的数据。
当传送结束或发生错误时,输出置1
FANUC oi系统——基本指令指令意义说明
G8。
0禁止所有伺服轴移动
G130。
0禁止系统定义的第一伺服轴移动
G130。
1禁止系统定义的第二伺服轴移动
G130。
2禁止系统定义的第三伺服轴移动
G130。
3禁止系统定义的第四伺服轴移动
G132。
0禁止系统定义的第一伺服轴正方向移动
G132。
1禁止系统定义的第二伺服轴正方向移动
G132。
2禁止系统定义的第三伺服轴正方向移动
G132。
3禁止系统定义的第四伺服轴正方向移动
G134。
0禁止系统定义的第一伺服轴负方向移动
G134。
1禁止系统定义的第二伺服轴负方向移动
G134。
2禁止系统定义的第三伺服轴负方向移动
G134。
3禁止系统定义的第四伺服轴负方向移动。