平面连杆机构综合编程作业
平面连杆机构习题及答案.docx
平面连杆机构一、填空:1. 由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。
2 .铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。
3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。
4. 铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和。
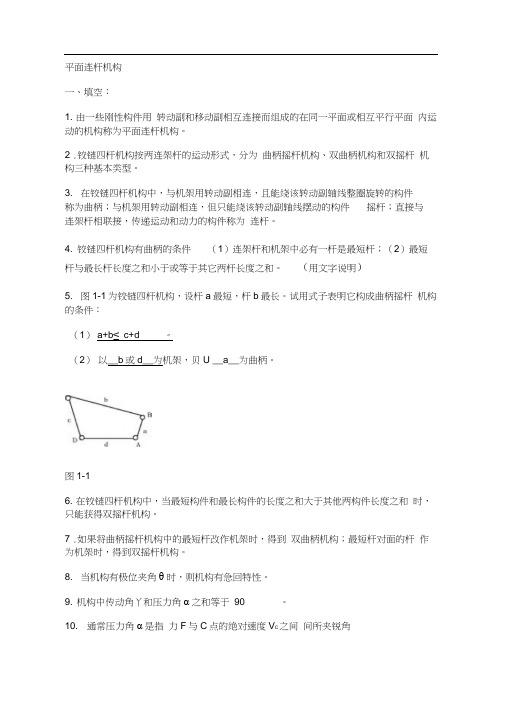
(用文字说明)5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。
试用式子表明它构成曲柄摇杆机构的条件:(1)a+b≤c+d 。
(2)以__b或d__为机架,贝U __a__为曲柄。
图1-16. 在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。
7 .如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。
8. 当机构有极位夹角θ时,则机构有急回特性。
9. 机构中传动角丫和压力角α之和等于90°。
10. 通常压力角α是指力F与C点的绝对速度V C之间间所夹锐角二、选择题:1 •在曲柄摇杆机构中,只有当C∙摇杆为主动件时,才会出现“死点”位置。
A.连杆B.机架C.摇杆 D •曲柄2. 绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构 B.不存在曲柄。
A.有曲柄存在B.不存在曲柄C.有时有曲柄,有时没曲柄D.以上答案均不对3. 当急回特性系数为 C. K > 1 时,曲柄摇杆机构才有急回运动。
A. K V1B. K = 1C. K > 1D. K = 04. 当曲柄的极位夹角为 D. θ> 0 时,曲柄摇杆机构才有急回运动。
A. θ V 0B. θ=OC. θ≤ 0D. θ > 05. 当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是C.不确定的。
平面连杆机构习题及标准答案
平面连杆机构一、填空:1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。
2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。
3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。
4.铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和。
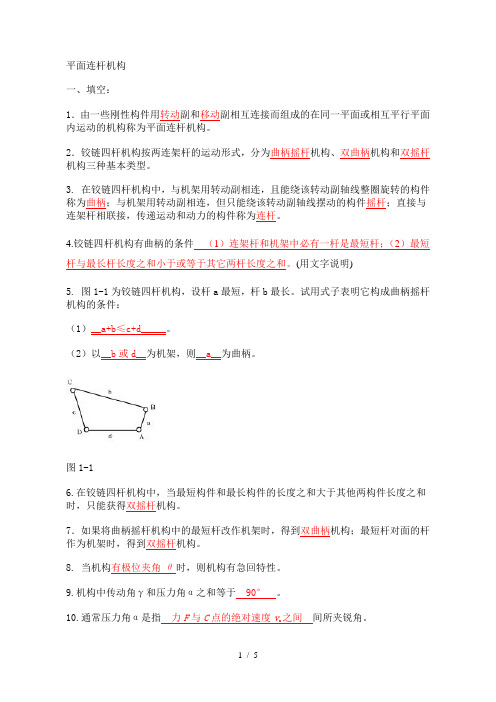
(用文字说明)5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。
试用式子表明它构成曲柄摇杆机构的条件:(1)__a+b≤c+d_____。
(2)以__b或d__为机架,则__a__为曲柄。
图1-16.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得双摇杆机构。
7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。
8. 当机构有极位夹角θ时,则机构有急回特性。
9.机构中传动角γ和压力角α之和等于90°。
10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。
二、选择题:1.在曲柄摇杆机构中,只有当 C.摇杆为主动件时,才会出现“死点”位置。
A.连杆B.机架C.摇杆 D.曲柄2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构 B.不存在曲柄。
A.有曲柄存在B.不存在曲柄C. 有时有曲柄,有时没曲柄D. 以上答案均不对3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。
A. K<1B. K=1C. K>1D. K=04.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。
A.θ<0B.θ=0C. θ≦0D. θ﹥05.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是C.不确定的。
《平面连杆传动机构作业设计方案-2023-2024学年高中通用技术地质版2019》

《平面连杆传动机构》作业设计方案一、设计要求1. 设计一个平面连杆传动机构,实现输入轴的旋转运动转换为输出轴的直线往来运动。
2. 输出轴的往来运动幅度为20mm,速度为20mm/s。
3. 设计要思量传动效率、结构稳定性和工作可靠性。
4. 设计要求符合机械设计原理和相关标准规范。
二、设计方案1. 选择机构类型:平面连杆传动机构2. 确定输入轴和输出轴位置:输入轴为旋转轴,输出轴为直线往来轴。
3. 确定连杆长度:根据输出轴的往来运动幅度确定连杆长度。
4. 确定连杆位置:根据输入轴和输出轴位置确定连杆位置,保证连杆在运动过程中不会发生干涉。
5. 确定连杆角度:根据输入轴和输出轴位置确定连杆角度,保证连杆在运动过程中不会发生过大的角度变化。
6. 确定传动比:根据输出轴的速度要求确定传动比,选择合适的齿轮传动或皮带传动。
7. 确定传动方式:根据传动效率要求选择合适的传动方式,保证传动效率高。
8. 确定传动元件:选择合适的齿轮、链条或皮带等传动元件,保证工作可靠性和结构稳定性。
9. 进行动力学分析:进行连杆传动机构的动力学分析,验证设计方案的合理性和可行性。
10. 进行结构优化:根据动力学分析结果进行结构优化,提高传动效率和工作可靠性。
三、设计计算1. 连杆长度计算:根据输出轴的往来运动幅度确定连杆长度。
2. 传动比计算:根据输出轴的速度要求确定传动比。
3. 传动效率计算:根据传动方式确定传动效率。
4. 动力学分析:进行连杆传动机构的动力学分析,验证设计方案的合理性和可行性。
5. 结构优化:根据动力学分析结果进行结构优化,提高传动效率和工作可靠性。
四、设计方案优势1. 结构简单:采用平面连杆传动机构,结构简单,易于制造和维护。
2. 传动效率高:通过传动方式和结构优化,传动效率高。
3. 工作可靠性高:通过结构优化,保证机构工作可靠性。
4. 运动稳定性好:通过连杆角度和位置的确定,保证机构运动稳定性。
五、结论本设计方案基于平面连杆传动机构,实现了输入轴的旋转运动转换为输出轴的直线往来运动,满足了设计要求。
平面连杆机构习题及答案知识讲解
平面连杆机构习题及答案平面连杆机构一、填空:1.由一些刚性构件用转动副和移动副相互连接而组成的在同一平面或相互平行平面内运动的机构称为平面连杆机构。
2.铰链四杆机构按两连架杆的运动形式,分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本类型。
3. 在铰链四杆机构中,与机架用转动副相连,且能绕该转动副轴线整圈旋转的构件称为曲柄;与机架用转动副相连,但只能绕该转动副轴线摆动的构件摇杆;直接与连架杆相联接,传递运动和动力的构件称为连杆。
4.铰链四杆机构有曲柄的条件(1)连架杆和机架中必有一杆是最短杆;(2)最短杆与最长杆长度之和小于或等于其它两杆长度之和。
(用文字说明)5. 图1-1为铰链四杆机构,设杆a最短,杆b最长。
试用式子表明它构成曲柄摇杆机构的条件:(1)__a+b≤c+d_____。
(2)以__b或d__为机架,则__a__为曲柄。
图1-16.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时,只能获得曲柄摇杆机构。
7.如果将曲柄摇杆机构中的最短杆改作机架时,得到双曲柄机构;最短杆对面的杆作为机架时,得到双摇杆机构。
8. 当机构有极位夹角θ时,则机构有急回特性。
9.机构中传动角γ和压力角α之和等于90°。
10.通常压力角α是指力F与C点的绝对速度v c之间间所夹锐角。
二、选择题:1.在曲柄摇杆机构中,只有当 C.摇杆为主动件时,才会出现“死点”位置。
A.连杆B.机架C.摇杆 D.曲柄2.绞链四杆机构的最短杆与最长杆的长度之和,大于其余两杆的长度之和时,机构 B.不存在曲柄。
A.有曲柄存在B.不存在曲柄C. 有时有曲柄,有时没曲柄D. 以上答案均不对3.当急回特性系数为 C. K>1 时,曲柄摇杆机构才有急回运动。
A. K<1B. K=1C. K>1D. K=04.当曲柄的极位夹角为 D. θ﹥0 时,曲柄摇杆机构才有急回运动。
A.θ<0B.θ=0C. θ≦0D. θ﹥05.当曲柄摇杆机构的摇杆带动曲柄运动对,曲柄在“死点”位置的瞬时运动方向是 C.不确定的。
平面连杆机构及其设计习题及答案

04 平面连杆机构及其设计1.在 条件下,曲柄滑块机构具有急回特性。
2.机构中传动角γ和压力角α 之和等于 。
3.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时, 只能获得 机构。
4.平面连杆机构是由许多刚性构件用 联接而形成的机构。
5.在图示导杆机构中,AB 为主动件时,该机构传动角的值为 。
6.在摆动导杆机构中,导杆摆角ψ£=30o ,其行程速度变化系数K 的值为 。
7.在四杆机构中AB BC CD AD AD ====40406060,,,,为机架,该机构是 。
8.铰链四杆机构具有急回特性时其极位夹角θ值 ,对心曲柄滑块机构的θ值 , 所以它 急回特性,摆动导杆机构 急回特性。
9.对心曲柄滑块机构曲柄长为a ,连杆长为b ,则最小传动角γmin 等于 ,它出现在 位置。
10.在四连杆机构中,能实现急回运动的机构有(1) ,(2) ,(3) 。
11.铰 链 四 杆 机 构 有 曲 柄 的 条 件 是 ,双 摇 杆机 构 存 在 的 条 件是 。
(用 文 字 说 明 )12.图示运动链,当选择 杆为机架时为双曲柄机构;选择 杆为机架时为 双摇杆机构;选择 杆为机架时则为曲柄摇杆机构。
13.在曲柄滑块机构中,若以曲柄为主动件、滑块为从动件,则不会出现“死点位置”,因最小传动角γmin>,最大压力角αmax<;反之,若以滑块为主动件、曲柄为从动件,则在曲柄与连杆两次共线的位置,就是,因为该处γmin=,αmax=。
14.当铰链四杆机构各杆长为:a=50mm,b=60mm,c=70 mm,d=200mm。
则四杆机构就。
15.当四杆机构的压力角α=90︒时,传动角等于,该机构处于位置。
16.在曲柄摇杆机构中,最小传动角发生的位置在。
17.通常压力角α是指间所夹锐角。
18.铰链四杆机构曲柄、连杆、机架能同时共线的条件是。
19.一对心式曲柄滑块机构,若以滑块为机架,则将演化成机构。
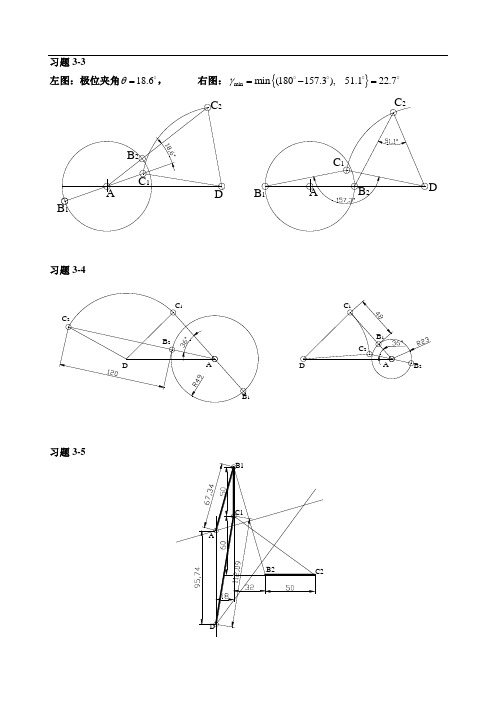
第3章 平面连杆机构及其设计部分习题参考答案

左图:极位夹角18.6θ= , 右图:{}m i n m i n (180157.3),51.122.7γ=-=习题3-4习题3-5习题3-7习题3-8 解:1 1.511801803611.51K K θ--===++112sin(/2)200sin 1861.8O A O O l l mm θ===80127.3236180H r m mπθ===⨯综合测试题3-2综合测试题3-312118018060121K K θ--===++(1)若为摆动导杆机构,如图(1):4080sin(/2)sin 30BC AB mm θ===1212502522E E AF A F m m ====12550sin 301/2A F A D m m ===min 50100cos cos 60AD D E m m γ===图(1)(2)若为转动导杆机构,如图(2):cos 40cos 6020AB BC mm θ===1212/2/225AD D D E E m m === min2550cos cos 60AD D E m m γ===( 图图(2)C 2D 110F260°°60°508040DE E2E1D 2C 1BA测试题:(请同学们思考求解)一、设计一曲柄摇杆机构,当曲柄为主动件,从动摇杆处于两极限位置时,连杆的两铰链点的连线正好处于图示之C 11和C 22位置,且连杆处于极限位置C 11时机构的传动角为︒40。
连杆与摇杆的铰接点取在C 点(即图中之C 1点或C 2点)。
试用图解法求曲柄AB 和摇杆CD 之长。
(直接在图上作图,保留作图线,不用写作图步骤,mm m l /001.0=μ)二、摇筛机构示意图如图(a). 已知连杆(筛子)长l =1500mm ,其工作的两极限位置E C 和E C ,1E 点,27。
试求曲柄BC 的长度BC l 及插刀P 的行程s ;。
机械原理--平面连杆机构练习+答案教学文案
机械原理--平面连杆机构练习+答案《机械设计基础》作业二--平面连杆机构姓名班级学号成绩一、填空题:(24分)1、平面连杆机构,至少需要 4个构件。
2、平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。
3、在铰链四杆机构中,运动副全部是转动副。
4、在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。
5、某些平面连杆机构具有急回特性。
从动件的急回性质一般用行程速度变化系数表示。
6、对心曲柄滑快机构无(有,无)急回特性;若以滑块为机架,则将演化成移动导杆机构。
7、铰链四杆机构根据有无曲柄分为曲柄摇杆机构、双曲柄机构和双摇杆机构。
如图所示铰链四杆机构中,若机构以AB为机架时,则为双曲柄机构;以BC杆为机架时,它为曲柄摇杆机构;以CD杆为机架时,它为双摇杆机构;而以AD杆为机架时,它为曲柄摇杆机构。
8、在曲柄摇杆机构中,当曲柄与机架两次共线位置时出现最小传动角。
9、压力角指:从动件上作用的力F 与该力作用点的速度(绝对速度)方向所夹的锐角α。
10、机构的压力角越小(大,小)对传动越有利。
11、运动副中,平面接触的当量摩擦系数为 f ,槽面接触的当量摩擦系数为f/sinθ,圆柱面接触的当量摩擦系数为ρ/r 。
12、移动副的自锁条件是驱动力F 与法向反力N的夹角β小于摩擦角ϕ,即驱动力作用在摩擦角之内,转动副的自锁条件是驱动力作用在摩擦圆之内,即e<ρ,其中e为驱动力臂长,螺旋副的自锁条件是螺纹升角α小于或等于螺旋副的摩擦角或当量摩擦角,即α≤ϕ。
二、选择题(27分)1、当四杆机构处于死点位置时,机构的压力角____B____。
A.为0ºB.为90ºC.与构件尺寸有关2、四杆机构的急回特性是针对主动件作___A_____而言的。
A. 等速转动B. 等速移动C. 变速转动或变速移动3、对于双摇杆机构,最短构件与最长构件长度之和____B____大于其它两构件长度之和。
A . 一定 B. 不一定 C. 一定不4、曲柄摇杆机构___B_____存在急回特性。
第3章 平面连杆机构及其设计部分习题参考答案
习题3-3左图:极位夹角18.6θ=, 右图:{}m i n m i n (180157.3),51.122.7γ=-=习题3-4习题3-5习题3-6习题3-7习题3-8 解:1 1.51180180361 1.51K K θ--===++112sin(/2)200sin1861.8O A O O l l mm θ=== 80127.3236180Hr mm πθ===⨯综合测试题3-2综合测试题3-3121180********K K θ--===++(1)若为摆动导杆机构,如图(1):4080sin(/2)sin 30BC AB mm θ===1212502522E E AF AF mm ==== 12550sin 301/2AF AD mm ===min 50100cos cos60AD DE mm γ===图(1)(2)若为转动导杆机构,如图(2):cos 40cos6020AB BC mm θ===1212/2/225AD D D E E mm === min 2550cos cos60AD DE mm γ===(图 图(2)C2D1100F260°°60°508040DE E2E1D2C1BA测试题:(请同学们思考求解)一、设计一曲柄摇杆机构,当曲柄为主动件,从动摇杆处于两极限位置时,连杆的两铰链点的连线正好处于图示之C 11和C 22位置,且连杆处于极限位置C 11时机构的传动角为︒40。
连杆与摇杆的铰接点取在C 点(即图中之C 1点或C 2点)。
试用图解法求曲柄AB 和摇杆CD 之长。
(直接在图上作图,保留作图线,不用写作图步骤,mm m l /001.0=μ)二、摇筛机构示意图如图(a). 已知连杆(筛子)长l =1500mm ,其工作的两极限位置E C 和E C ,1E 点,27。
试求曲柄BC 的长度BC l 及插刀P 的行程s ;出师表两汉:诸葛亮先帝创业未半而中道崩殂,今天下三分,益州疲弊,此诚危急存亡之秋也。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平面连杆机构综合计算机编程作业
从下列题目任选一题进行设计,要求建立几何模型和数学模型,选用一种计算机语言编制程序,要求能够在动画演示时能够显示最小传动角,在输出设计参数时能够通过动画检验设计效果并将最小传动角输出。
作业要求:解题过程(包括几何模型、数学模型建立)以论文格式用word文件编写,力求完善;并在其后列出其程序清单。
软件以exe文件格式。
一、某机器的工作装置需采用铰链四杆机构进行位置导引,已知工作装置上某一点在空间的位置为P1(x1,y1),θ1;P2(x2,y2),θ2 ;P3(x3,y3),θ3 ;试根据所学知识编制一计算机程序实现该装置的机构设计。
要求:
1.采用参数化方法,P1,P2,P3可任意输入,能够完成二、三位置的设计;
2.写出设计过程及程序清单汇成一设计说明书,其中还应包含一定的检验方法;
二、如图所示,设要求四杆机构两连架杆的三组对应位置分别为α1=35°,φ1
=50°;α2=80°,φ2=75°;α3=125°,φ3=105°,试以解析法设计此四杆机构。
形成可执行的计算机设计程序;
写出设计说明书,并对设计中的具体考虑进行说明。
三、造型机工作台翻转的铰链四杆机构ABCD,连杆BC(长度根据需要设定)两个位置如图所示,机架AD水平布置,γi≥40°,试设计出此机构(要求扼要说明设计步骤,确定主动件及其转向)。
腹有诗书气自华
腹有诗书气自华
四. 已知三个给定刚体位置,P 1(1,1),θ1=0°;P 2(1.5,0.5),θ2=10°;P 3(2.5,1.0),θ3=45°。
并要求在各个给定位置时传动角γi ≥30°(i =1,2,3)试综合一个导引曲柄滑块机构。
五. 如图所示,已知主动连架杆AB 的长度l AB =16mm ,机架AD 的长度l AD =50mm ,当AB 从图示位置顺时针转过某一角度时,连杆平面上的E 点经过E 1,E 2,E 3三点。
DE 1==30mm ,E 1E 2=E 2E 3=12mm 。
试综合能实现连杆E 点的铰链四杆机构ABCD 。
六. 已知固定铰链点A (0,0),D (1,4),连架杆AB 的长度为l AB =15mm ,连架杆AB 与连杆的三组对应位置如图所示。
试综合该全铰链四杆机构并写出各构件的杆长。
七. 欲设计一个夹紧机构,拟采用全铰链四杆机构ABCD 。
已知连杆的两个位置:x P1=0.5,y P1=0.5,θ1=20°,x P2=1.5,y P2=1.8,θ
2=38°,如图示。
连杆到达第二位置时为夹紧位置,
即若以CD
为主动件,则在此位置时,机构应处于死
点位置,并且要求此时C2D处于垂直位置。
八. 在图示插床机构中,滑块5的移动导路ee通过铰链中心C,且垂直于AC。
B、C、D 三点共线。
导杆机构ABC的两连架杆可作整周转动,AB为原动件,以ω1等速转动。
若要求滑块的行程s=154mm,行程速比系数K=1.5,B点轨迹与导路ee的交点B1,B2之间距B1B2=2s。
试综合满足这一条件的插床机构并演示其运动。
两汉:诸葛亮
先帝创业未半而中道崩殂,今天下三分,益州疲弊,此诚危急存亡之秋也。
然侍卫之臣不懈于内,忠志之士忘身于外者,盖追先帝之殊遇,欲报之于陛下也。
诚宜开张圣听,以光先帝遗德,恢弘志士之气,不宜妄自菲薄,引喻失义,以塞忠谏之路也。
宫中府中,俱为一体;陟罚臧否,不宜异同。
若有作奸犯科及为忠善者,宜付有司论其刑赏,以昭陛下平明之理;不宜偏私,使内外异法也。
侍中、侍郎郭攸之、费祎、董允等,此皆良实,志虑忠纯,是以先帝简拔以遗陛下:愚以为宫中之事,事无大小,悉以咨之,然后施行,必能裨补阙漏,有所广益。
将军向宠,性行淑均,晓畅军事,试用于昔日,先帝称之曰“能”,是以众议举宠为督:愚以为营中之事,悉以咨之,必能使行阵和睦,优劣得所。
亲贤臣,远小人,此先汉所以兴隆也;亲小人,远贤臣,此后汉所以倾颓也。
先帝在时,每与臣论此事,未尝不叹息痛恨于桓、灵也。
侍中、尚书、长史、参军,此悉贞良死节之臣,愿陛下亲之、信之,则汉室之隆,可计日而待也。
腹有诗书气自华
臣本布衣,躬耕于南阳,苟全性命于乱世,不求闻达于诸侯。
先帝不以臣卑鄙,猥自枉屈,三顾臣于草庐之中,咨臣以当世之事,由是感激,遂许先帝以驱驰。
后值倾覆,受任于败军之际,奉命于危难之间,尔来二十有一年矣。
先帝知臣谨慎,故临崩寄臣以大事也。
受命以来,夙夜忧叹,恐托付不效,以伤先帝之明;故五月渡泸,深入不毛。
今南方已定,兵甲已足,当奖率三军,北定中原,庶竭驽钝,攘除奸凶,兴复汉室,还于旧都。
此臣所以报先帝而忠陛下之职分也。
至于斟酌损益,进尽忠言,则攸之、祎、允之任也。
愿陛下托臣以讨贼兴复之效,不效,则治臣之罪,以告先帝之灵。
若无兴德之言,则责攸之、祎、允等之慢,以彰其咎;陛下亦宜自谋,以咨诹善道,察纳雅言,深追先帝遗诏。
臣不胜受恩感激。
今当远离,临表涕零,不知所言。
腹有诗书气自华。