无人机免像控航测技术在地形测量中的应用研究
无人机航空摄影测量在地形图测绘中的应用探讨

无人机航空摄影测量在地形图测绘中的应用探讨1. 引言1.1 研究背景无人机航空摄影测量技术是近年来随着科技的发展而迅速发展起来的一项新兴技术。
随着无人机技术的不断成熟和摄影测量技术的进步,无人机航空摄影测量在地形图测绘领域具有广阔的应用前景。
随着各种高分辨率、多光谱、高精度的传感器的不断涌现,无人机航空摄影测量技术已经可以在地形图测绘中取得越来越精确和可靠的测量结果。
研究无人机航空摄影测量在地形图测绘中的应用,对于提高地形图的精度和实用性具有极其重要的意义。
通过研究无人机航空摄影测量在地形图测绘中的应用,不仅可以提高地形图的制作效率和精度,还可以为地形图的更新和维护提供更为便捷和高效的解决方案。
是探讨无人机航空摄影测量在地形图测绘中的应用方法和技术,为地形图测绘提供新的技术支持和发展方向。
在于推动地形图测绘技术的创新和进步,提升地理信息科技在城市规划、资源勘探、环境监测等领域的应用水平。
1.2 研究目的研究目的旨在探讨无人机航空摄影测量在地形图测绘中的应用优势和实际案例,分析其在地形图测绘领域中的价值和作用。
通过对无人机航空摄影测量技术的概述和发展趋势的探讨,旨在为地形图测绘工作者提供更多的选择和解决方案,促进该领域的发展和创新。
研究还旨在探讨无人机航空摄影测量在地形图测绘领域中面临的挑战和未来发展方向,为相关研究和应用提供参考和借鉴。
通过研究目的的明确和实现,更好地推动无人机航空摄影测量技术在地形图测绘中的应用,为地理信息领域的科研和实践做出贡献。
1.3 研究意义无人机航空摄影测量在地形图测绘中的应用具有重要的现实意义和实际价值。
随着经济的不断发展和城市化进程的加速推进,地理信息科学已经成为现代社会不可或缺的重要组成部分,而地形图作为地理信息产品的主要内容之一,在城市规划、农业生产、资源调查和环境监测等领域起着至关重要的作用。
利用无人机航空摄影测量技术可以快速、高效地获取地形数据,为地形图制作提供了新的手段和途径。
无人机航空摄影测量在地形图测绘中的应用探讨

无人机航空摄影测量在地形图测绘中的应用探讨随着科技的不断发展,无人机航空摄影测量技术在地形图测绘中的应用越来越广泛。
无人机航空摄影测量技术具有成本低、效率高、覆盖范围广、可实时监测等诸多优势,为地形图测绘工作带来了革命性的变化。
本文将探讨无人机航空摄影测量技术在地形图测绘中的应用,分析其优势和存在的问题,并展望未来的发展趋势。
一、无人机航空摄影测量技术概述无人机航空摄影测量技术是利用无人机搭载摄影、激光雷达等传感器,通过航拍获取地表影像和地形数据,再通过数据处理和分析,生成数字地形模型、三维地理信息以及各种专题制图产品的一种技术。
无人机航空摄影测量技术相比传统的航空摄影测量技术具有成本低、灵活性高、响应速度快等优势,使得地形图测绘工作变得更加高效和精准。
1.地形图制图无人机航空摄影测量技术可以利用影像处理软件对航拍的图像进行处理,制作数字地形模型(DTM)、数字高程模型(DEM)等地理信息产品,为地形图制图提供了精准的数据支持。
传统的地形图制图需要大量的人力物力,而无人机航空摄影测量技术可以在短时间内完成大范围的航拍测绘工作,大大提高了制图效率。
2.地貌变化监测地形图的更新和维护对地貌变化的监测至关重要,特别是在山区、河流等易发自然灾害的地区。
无人机航空摄影测量技术可以通过多时相航拍获取地表影像和高程数据,进行地貌变化分析和监测,为灾害防治和资源开发提供有力支持。
3.环境监测无人机航空摄影测量技术还可以用于环境监测,通过定期航拍获取环境影像和数据,监测水资源、土壤、植被等环境要素的变化情况,为环境管理提供科学的依据。
1.成本低相比传统的航空摄影测量技术,无人机航空摄影测量技术无需昂贵的飞行设备和人员编制,成本大大降低。
2.效率高无人机航空摄影测量技术可以在较短时间内完成大范围的航拍测绘工作,比起传统测绘方法,效率更高。
3.覆盖范围广无人机航空摄影测量技术可以覆盖传统测绘技术难以到达的区域,如山区、森林等复杂地形地貌的测绘。
无人机航空摄影测量在地形图测绘中的应用探讨

无人机航空摄影测量在地形图测绘中的应用探讨随着无人机技术的不断发展,无人机航空摄影测量技术已经成为测绘业中不可缺少的一种重要技术手段。
相比于传统的测量方法,无人机航拍技术具有高效、低成本、高精度、高分辨率等优点,已经被广泛应用于地形图测绘、城市规划、土地利用等领域。
本文主要探讨无人机航空摄影测量在地形图测绘中的应用。
地形图是反映地球表面地貌特征、地层地貌关系及地物种类分布等信息的基础地图。
传统的地形图测绘方法一般采用现场测量和简单测量仪器进行,需要耗费大量的时间和人力,而且无法获取全面、高分辨率的地形信息。
相比之下,无人机航空摄影测量技术具有以下优点:首先,无人机航拍速度快、灵活,能够高效获取大量数据。
传统的现场测量需要花费大量的时间和人力,而且数据的获取比较有限,很难反映整个测绘区域的地形信息。
而无人机航拍可以以更快的速度和更灵活的方式获取大量数据,能够快速建立地形图的初始数据集。
其次,无人机航拍的高分辨率图像能够提供更详细的地形信息。
在传统的测绘方法中,人眼观察地图只能获取到有限的地形信息,而无人机航拍技术可以拍摄高分辨率图像,能够捕捉到更多的地形细节信息,提供更详细的地图信息。
最后,无人机航拍的成本较低,减轻了测绘工作的经济负担。
传统的现场测量和简单测量仪器需要耗费大量的时间和人力成本,而无人机航拍技术的成本相对较低,可以减轻测绘工作的财务压力。
因此,无人机航空摄影测量技术已经广泛应用于地形图测绘中。
通过无人机航拍,可以快速、准确地获取大量地形信息,包括高程、坡度、地貌等,为地形图的制作提供了有效的数据支持。
在应用无人机航拍技术制作地形图的过程中,需要注意以下几个方面:首先,需要选择合适的传感器和摄像机。
选择高精度、高分辨率的传感器和摄像机可以保证拍摄数据的准确性和实用性。
其次,需要制定合适的航线和飞行高度。
航线和飞行高度的设定需要考虑到地形特征、拍摄效果和安全因素等因素,合理设计航线和飞行高度可以保证拍摄数据的准确性和安全性。
无人机航空摄影测量在地形图测绘中的应用探讨

无人机航空摄影测量在地形图测绘中的应用探讨无人机航空摄影测量是指将无人机平台与航空摄影测量技术相结合,通过无人机搭载的摄影测量设备进行高空、远距离地面拍摄,并通过图像处理软件实现地形图测绘。
相比传统的测绘方法,无人机航空摄影测量具有操作灵活、成本低廉、效率高等优势,在地形图测绘领域有着广泛的应用前景。
无人机航空摄影测量在地形图测绘中可以实现高分辨率的数据采集。
通过无人机拍摄的航空影像,可以获得高分辨率且高精度的地形数据,这对于地形图测绘来说非常重要。
传统的地面测量方法受到地势、障碍物等因素的限制,无法获得全面、准确的地形数据,而无人机可以在不受地形限制的情况下,自由地进行飞行拍摄,可以获取到更加准确、全面的地形数据。
无人机航空摄影测量在地形图测绘中可以提高测绘的效率。
传统的地形图测绘方法通常需要大量的人力和物力投入,耗时耗力。
而无人机航空摄影测量可以高效地完成大范围地形图的测绘工作。
无人机具有快速、灵活的特点,可以按照预定的航线进行自动化飞行,实时拍摄地面影像。
在图像处理软件的辅助下,可以较快地生成高质量的地形图,大大缩短了测绘周期,并节省了大量的人力物力。
无人机航空摄影测量还可以提高测绘数据的时效性。
无人机航空摄影测量可以实时地获取地形图的数据,可以及时地反馈和更新地理信息。
这对于那些需要实时掌握地理环境变化的应用领域非常有价值,比如决策支持系统、城市规划、灾害监测等。
无人机航空摄影测量可以实时采集、传输数据,为地理信息系统提供实时的、准确的地理数据支撑。
无人机航空摄影测量在地形图测绘中还面临一些挑战。
首先是空域管理的问题。
无人机在进行航空摄影测量时,需要遵守航空规定和空域使用规定,如避让其他飞行器、避让禁飞区等。
需要建立完善的无人机航空管理体系,保证无人机航空摄影测量的安全可靠。
无人机航空摄影测量的数据处理也是一个挑战。
无人机航空摄影测量获取的数据量较大,需要进行图像处理和数据挖掘。
这对于数据处理的软硬件要求都较高,需要有专业的图像处理软件和计算设备。
免像控无人机在地形图测绘中的应用
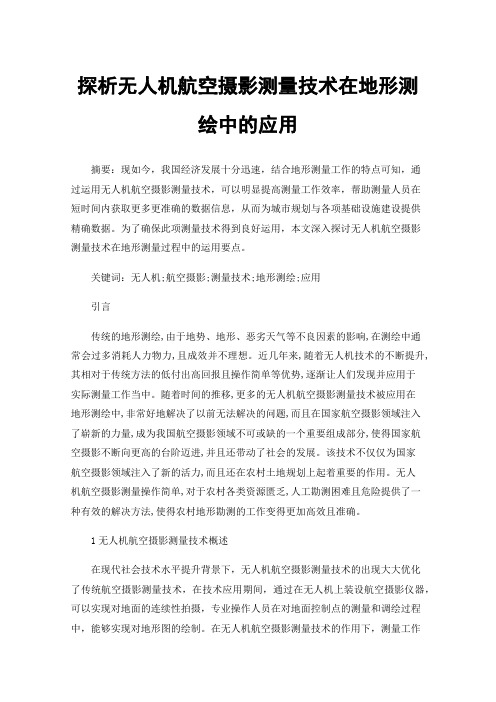
第34卷㊀第2期2020年2月㊀㊀北京测绘BeijingSurveyingandMappingVol.34㊀No.2February2020引文格式:石鼎.免像控无人机在地形图测绘中的应用[J].北京测绘ꎬ2020ꎬ34(2):163 ̄166.DOI:10.19580/j.cnki.1007 ̄3000.2020.02.006[收稿日期]㊀20191105[基金项目]㊀ 世景杯 第二届全国注册测绘师获奖论文(2019 ̄02 ̄07)[作者简介]㊀石鼎(1984 ̄)ꎬ男ꎬ山西晋中人ꎬ大学本科ꎬ工程师ꎬ从事测绘工程及地理信息相关工作ꎮE ̄mail:shijieguoyu_19@163.com免像控无人机在地形图测绘中的应用石㊀鼎(山东中基地理信息科技有限公司ꎬ山东济南250101)[摘㊀要]㊀随着社会的发展和科技的进步ꎬ各种先进的测量设备也不断涌现出来ꎮ近几年来ꎬ无人机航测在测绘行业中发展非常迅速ꎬ尤其是在地形图测绘中ꎮ中小比例尺的地形图测绘基本上都采用航测的方法进行ꎬ但是免像控无人机在大比例尺地形图测绘生产过程中仍然存在很多问题ꎮ本文以泰安某地区1ʒ500地形图测绘项目为例ꎬ通过对航线设计㊁影像处理方面的分析ꎬ为提高作业效率以及地形图成果精度提供了有效的手段ꎮ[关键词]㊀无人机ꎻ免像控ꎻ地形图ꎻ问题分析[中图分类号]㊀P217P231㊀㊀㊀[文献标识码]㊀A㊀㊀㊀[文章编号]㊀1007-3000(2020)02-0163-40㊀引言目前ꎬ外业数据采集手段多样化ꎬ无人机航测已经是常见的数据采集手段[1]ꎮ所谓的免像控就是不需要人工进行地面像片控制测量ꎬ无人机上装载POS定位定向系统ꎬ根据地面基站ꎬ实时获取像片的外方位元素ꎬ应用共线条件方程求得地面加密点的坐标ꎮ但是在无人机作业过程中ꎬ飞行航线设计㊁影像获取㊁数据处理等各个环节都会影响作业效率及成果精度ꎮ本文结合实际项目ꎬ分析无人机在作业过程中遇到的实际问题ꎬ并提出了解决方案ꎮ1㊀免像控无人机介绍本项目采用的无人机航测系统包括:天狼星无人机㊁相机套件㊁MAVinciDesktop桌面软件㊁MAVinci连接器㊁遥控器ꎮ作业过程总体分为:制定飞行计划㊁通过天狼星无人机获取影像㊁影像的后处理ꎮ工作原理:借助RTK技术ꎬ在采集相片的同时进行RTK测量ꎬ根据地面基站ꎬ每张照片都具有RTK固定解精度的位置信息ꎬ实时获取每张照片的外方位元素ꎬ通过整合精密测时和高精度定位技术ꎬ应用共线条件方程求得地面加密点的坐标ꎬ使得天狼星无人机在空中即可完成传统的地面像片控制测量[2 ̄3]ꎮ2㊀工程应用2.1㊀工程概况本工程为泰安市境内某镇1ʒ500地形图更新测量ꎬ面积约8km2ꎬ测区主要为丘陵地ꎬ海拔高度一般在120~400m之间ꎮ测区地表以稀疏果园为主ꎬ房屋较少ꎬ丘陵地区有梯田ꎮ测区视野开阔ꎬ适合无人机航飞ꎮ具体工作流程如图1所示ꎮ图1㊀无人机测图作业流程图2.2㊀制定飞行计划飞行计划在MAVinciDesktop桌面软件下进行设计ꎬ根据测区的实际情况ꎬ飞行计划设置如北京测绘第34卷㊀第2期下:照片设置(最大横滚角10ʎꎬ最大俯仰角10ʎ)㊁地面采样距离3cmꎬ高度117mꎬ航向重叠度85%ꎬ旁向重叠度65%ꎮ由于测区属于丘陵地貌ꎬ航线设计采用软件自带的自适应地形飞行计划ꎬ地形模式采用航线内线性渐变ꎮMAVinciDesktop软件内置Google地球为底图ꎬ随着地形起伏变化ꎬ飞行高度也随之变化ꎬ如图2所示ꎮ图2㊀自适应地形航线设计2.3㊀影像获取在测区内选择视野开阔ꎬ有利于飞机起飞㊁降落ꎬ以及信号无遮挡的区域架设基准站ꎮ测量基站点坐标ꎬ量取天线高ꎬ并记录ꎮ将制定好的飞行计划发送到无人机ꎬ飞机在接收到指令后按照已经规划好的航线进行飞行ꎬ并将飞行姿态数据实时传送到地面ꎮ根据照片的重叠度ꎬ无人机自动计算出拍摄每张照片的时间间隔ꎬ拍摄的照片存储在相机内存卡中ꎮ在拍摄过程中ꎬ无人机时刻保持与地面基站的连接ꎬ并且为固定解状态ꎮ地面工作站通过连接器实时监控无人机的飞行状态ꎬ飞行计划完成后ꎬ无人机会自动降落到指定地点或者通过人工遥控降落至地面ꎮ2.4㊀影像后处理通过MAVinciDesktop桌面软件ꎬ将拍摄的照片及POS数据生成匹配文件ꎬ在相片匹配过程中ꎬ软件会将模糊照片㊁非固定解照片自动剔除ꎬ以获得最优的匹配文件ꎮ将匹配文件导入到AgisoftPhotoScan软件中ꎬ设置 对齐照片为高 ꎬ密集点云选择 中 (点云越密越真实ꎬ等同于三角网密度ꎬ根据测区地物复杂程度ꎬ房㊁树㊁坎较多的话选高)ꎮ设置完成后选择无地面控制点处理ꎬ之后无须人工干预即可生成DEM㊁DOM㊁点云等成果数据ꎮ2.5㊀地形图测绘本项目数字线划图(DLG)的采集采用清华山维EPS2008软件进行ꎬ将生成的DEM㊁DOM影像数据ꎬ在软件中加载合并生成数字地表模型(DSM)ꎬ对照三维模型矢量化ꎬ无需传统立测的3D眼镜㊁手轮㊁脚盘[4]ꎮ作业人员直接裸眼进行数据采集ꎬ主要内容有建筑物及构筑物㊁道路㊁河流㊁沟坎㊁地类范围等能够肉眼辨认的各类地物ꎮ高程数据利用EPS软件从点云中筛选ꎬ或者采用VirtualSurveyor软件生成DSMꎬ在3D模式下根据地形地貌特征采集需要的高程数据ꎮ3㊀影响作业效率及成果精度的因素3.1㊀航线设计地面采样距离(GSD)是航测中的重要参数ꎬ由于焦距固定不变ꎬGSD仅受航高影响ꎬ如图3所示ꎬGSD与航高线性相关ꎮ一张影像在平坦地面上的覆盖面积随着航高的增加呈二次方增长ꎮ每个架次飞行的覆盖面积随着GSD的增大而成线性增加ꎮ拍摄的照片数量随着GSD的减小而呈二次方增长ꎮ图3㊀航高与GSD的关系图为了提高影像精度可以减小地面采样距离ꎬ但是拍摄的照片数量会增多ꎬ每个架次的覆盖面积减小ꎬ影响整个工程的进度ꎮ与此同时ꎬ航高太低会影响飞行的安全ꎮ为了提高航测效率可以增大地面采样距离ꎬ但是无法满足大比例尺测图精度要求ꎮ综合各方面因素ꎬ1ʒ500地形图航测地面采样距离一般为3~5cmꎬ此距离为最佳选择ꎮ旁向重叠取决于航线间距离ꎬ增大重叠将使一次飞行的覆盖面积线性减小ꎮ航向重叠取决于相机照片拍摄时间间隔ꎮ如图4所示ꎬ在丘陵或山地飞行ꎬ无人机下方的地面是不平坦的ꎮ如果按照常规的飞行模式ꎬ地面采样距离将会发生变化ꎮ另外ꎬ此时像片的重叠度(航向和旁向)会影响后期的数据处理ꎮ图4㊀地形对影像重叠的影响461第34卷㊀第2期石鼎.免像控无人机在地形图测绘中的应用综上ꎬ在山地飞行时ꎬ航线应针对实际地形布设ꎬ行高随地形的起伏而变化ꎮ以保证地面采样距离一致ꎬ像片重叠度相同ꎬ为后期影像处理提供可靠数据ꎮ3.2㊀地面控制点天狼星航摄系统软件MAVinci在AgisoftPho ̄toScan软件中增加MAVinci模块ꎬ包括:无地面控制点处理和地面控制点处理等功能ꎮ本项目采用无地面控制点处理的方式进行DEM㊁DOM㊁点云数据的生成ꎮ为了比较免像控数据处理与含地面控制点处理后影像的精度ꎬ提取了5个架次2415张照片分别处理了两次ꎬ并进行了精度统计[5 ̄6]ꎮ加密地面控制点处理ꎬ四周均匀布设控制点ꎬ内部少量布设ꎬ将地面控制点与照片上的实际位置相对应ꎬ然后进行含地面控制点处理ꎬ如图5所示ꎮ图5㊀含地面控制点数据处理数据处理完成后ꎬ外业人员采用GPS ̄RTK和全站仪相结合的方式ꎬ在本架次范围内对24个特征点进行平面和高程数据采集ꎬ并进行了精度分析ꎮ主要选取道路拐角㊁院墙拐角㊁桥头等作为平面检测点ꎬ高程检测点主要在高程变化不大的硬化道路中心选取ꎮ地面检查点分布如图6所示ꎮ图6㊀地面检查点分布图精度统计从两方面统计ꎬ第一是通过RTK实测数据与无地面控制点处理生成的影像数据进行比较ꎬ第二是通过RTK实测数据与含地面控制点处理生成的影像数据进行比较[7 ̄9]ꎮ通过对检查点在影像成果中的坐标值与外业实测的坐标值进行比较分析ꎬ结果如表1和表2所示[10 ̄11]ꎮ表1㊀无地面控制点影像检查点精度单位:m点号ΔXΔYΔH10.080 ̄0.0130.15620.1160.1000.19530.052 ̄0.032 ̄0.18640.051 ̄0.041 ̄0.22650.023 ̄0.0120.1606 ̄0.014 ̄0.0450.186⋮⋮⋮⋮240.152 ̄0.1980.194㊀注:平面中误差为ʃ0.160ꎬ高程中误差为ʃ0.172ꎮ表2㊀含地面控制点影像检查点精度单位:m点号ΔXΔYΔH1 ̄0.150 ̄0.1200.10920.0480.0100.1943 ̄0.084 ̄0.0500.24840.123 ̄0.0050.07050.1230.0400.10960.090 ̄0.024 ̄0.054⋮⋮⋮⋮24 ̄0.1120.0890.101㊀注:平面中误差为ʃ0.137ꎬ高程中误差为ʃ0.146ꎮ从上表的精度统计可以看出ꎬ含地面控制点处理的影像检查点平面中误差比无地面控制点处理的影像检查点减小0.23mꎬ高程中误差减小0.26mꎮ如果需要获得更高精度的地形图ꎬ可以在测区少量加密地面控制点ꎬ并使其均匀分布ꎮ3.3㊀数据处理软件目前无人机影像处理软件常用的主要有PhotoScan㊁Pix4Dmapper㊁Inpho等ꎬ本项目分别采用PhotoScan与Pix4Dmapper对影像进行处理ꎬ并对成果数据进行比对分析ꎮ数据处理的前提条件是:相同的数据(5个架次2415张照片)ꎬ同一套工作站ꎬ相同的参数设定ꎮ地面采样距离3cmꎬ高度117mꎬ航向重叠度85%ꎬ旁向重叠度65%ꎮ(1)处理效率PhotoScan:包括对齐照片㊁建立密集点云㊁创建TIN模型㊁生成纹理㊁镶嵌㊁输出DEM㊁DOM561北京测绘第34卷㊀第2期等ꎬ共用时18小时46分钟54秒ꎮPix4Dmapper:包括初始化处理㊁生成点云和纹理㊁生成DSM及DOM生成ꎬ共用时26小时50分钟21秒ꎮ通过比较ꎬPhotoScan数据处理速度明显高于Pix4Dmapperꎮ在实际应用过程中ꎬ如果要求快速提供高分辨率影像的ꎬ可采用PhotoScan软件处理数据ꎮ例如在灾害发生时ꎬ快速获取的高分辨率影像可以为领导决策㊁指挥救援和科学制定救灾方案以及灾后重建规划提供指导依据ꎮ(2)精度分析两款软件生成正射影像后ꎬ采用上述相同的方法对24个检查点进行精度分析ꎬ检查点误差统计如表3所示ꎮ表3㊀检查点误差统计单位:m软件名称平面中误差高程中误差PhotoScanʃ0.137ʃ0.146Pix4Dmapperʃ0.130ʃ0.115从表3中可以看出ꎬPhotoScan与Pix4Dmapper生成数据的平面精度相差很小ꎬ高程精度Pix4Dmapper优于PhotoScanꎮ4㊀结束语目前ꎬ免像控无人机航测已经广泛的应用在地形图测绘中ꎬ但是在大比例尺地形图的测绘中ꎬ还需要人工外业辅助测绘ꎬ才能保证其精度的可靠性ꎮ为提高作业效率ꎬ在航线设计过程中ꎬ要结合测区的地貌㊁天气情况采用最佳航线ꎮ在影像处理过程中ꎬ适当增加地面控制点ꎬ可以提高影像精度ꎮ另外ꎬ根据影像数据的用途可以采用不同的影像处理软件ꎬ如果在灾害应急救援中想快速获取DOM就采用PhotoScanꎬ如果想获得更高精度的影像数据就用Pix4Dmapperꎮ但是ꎬ免像控无人机的优点显而易见ꎬ外业工作比例减小ꎬ缩短了工期ꎬ工作效率有了很大的提高ꎮ相信随着科技的进步ꎬ测绘行业的不断发展ꎬ免像控无人机航测系统会更加完善ꎮ参考文献[1]贾彦昌ꎬ张斌.免像控无人机航摄系统在1ʒ500地形图测绘中的应用[J].北京测绘ꎬ2018ꎬ32(9):1092 ̄1096. [2]张剑清.摄影测量学[M].湖北武汉:武汉大学出版社ꎬ2009.[3]王家杰.无人机低空摄影测量系统研究[D].黑龙江哈尔滨:哈尔滨工业大学ꎬ2016.[4]范庆秀.无人机免像控技术在地形图测量中的应用研究[J].测绘通报ꎬ2017(S1):66 ̄68.[5]狄桂栓ꎬ沈彪群ꎬ高波ꎬ等.免像控无人机航摄系统在公路带状地形测量中的应用与精度分析[J].测绘通报.2017(2):159 ̄160.[6]康学凯.基于无人机航测系统的无控制测绘试验研究[J].矿山测量ꎬ2016(5):61 ̄65.[7]吕立蕾.无人机航摄技术在大比例尺测图中的应用研究[J].测绘与空间地理信息ꎬ2016(2):116 ̄118.[8]高志国ꎬ宋杨ꎬ曾凡洋.微型无人机航摄系统快速测绘小区域大比例尺地形图试验分析[J].工程勘察ꎬ2015(12):71 ̄75. [9]薛永安ꎬ王晓丽ꎬ张明媚.无人机航摄系统快速测绘矿区大比例尺地形图[J].测绘地理信息ꎬ2013(2):46 ̄48.[10]李敏ꎬ李存文ꎬ吕国卿ꎬ等.无人机1ʒ500测图的应用与分析[J].北京测绘ꎬ2018ꎬ32(7):827 ̄830.[11]何敬ꎬ李永树ꎬ鲁恒ꎬ等.无人机影像的质量评定及几何处理研究[J].测绘通报ꎬ2010(4):22 ̄24.ApplicationofUAVImageFreeControlinTopographicMapSurveyingSHIDing(ShandongzhongJiGeoinformationandTechnologyCompanyLimitedꎬJinanShandong250101ꎬChina)Abstract:Abstract:Withthedevelopmentofsocietyandtheprogressofscienceandtechnologyꎬvariousadvancedmeasuringequipmentsareconstantlyemerging.InrecentyearsꎬUAVaerialsurveyinghasdevelopedrapidlyinsurveyingandmappingindustryꎬespeciallyintopographicmapping.Smallandmediumscaletopographicmapsurveyingandmappingarebasicallycarriedoutbyaerialsurveyingmethodꎬbuttherearestillmanyproblemsintheproductionprocessoflargescaletopographicmapsurveyingandmappingbyimage ̄freeUAV.Takingthe1ʒ500topographicmapmappingprojectinTai anasanexam ̄pleꎬthroughtheanalysisofroutedesignandimageprocessingꎬthispaperprovidesaneffectivemeanstoimprovetheefficien ̄cyofoperationandtheaccuracyoftopographicmapresults.Keywords:UnmannedAerialVehicle(UAV)ꎻnophotocontrolpointꎻtopographicmapꎻanalysisproblem661。
免像控无人机在地形图测量中的应用

刘书林 黄 磊
( 聊城市城乡规划设计研究院ꎬ 山东 聊城 252000)
[ 摘 要] 通过 eBeePlus 免像控无人机航空摄影测量系统应用于 1∶ 500 地形图测绘工程实例ꎬ探究其 在实践中的制图精度及适用性ꎮ 使用 emotion3、Pix4dMapper 等软件进行外业航飞、内业影像处理ꎬ对比分析 RTK 和 PPK 两种解算方式下的制图精度ꎬ两者均满足规范要求ꎬPPK 解算方式更适宜在实践中使用ꎻ结合 Eps 软件制作数字线划地图ꎬ对于影像中无法提取的房屋边线、植被覆盖区域地物ꎬ采取全野外调绘、实测进 行补充ꎬ阐述了无人机航测与传统数字化测图相结合的作业方式ꎮ
[ 收稿日期] 2019 06 28 [ 作者简介] 刘书林(1972 - ) ꎬ男ꎬ山东聊城人ꎬ大学本科ꎬ工程师ꎬ从事航测、工程测量工作ꎮ E ̄mail:1360346330@ qq. com [ 通讯作者] 黄磊ꎬE ̄mail:997682629@ qq. com
244
北京测绘
பைடு நூலகம்
第 34 卷 第 2 期
免像控无人机是通过全球定位系统globalpositioningsystemgps载波相位差分定位获取航摄仪的空间位置参数以及imu获取无人机侧滚角俯仰角和航偏角e46获取航空影像曝光瞬间摄站三维空间坐标和航摄仪的姿态角经过对系统误差的检校直接获得影像外方位元素从而实现无像控便可恢复航空摄像的成像过程78
免像控无人机是通过全球定位系统( Global Positioning SystemꎬGPS) 载波相位差分定位获取 航摄仪的空间位置参数以及 IMU 获取无人机侧 滚角、俯仰角和航偏角[4 ̄6] ꎬ获取航空影像曝光瞬 间摄站三维空间坐标和航摄仪的姿态角ꎬ经过对 系统误差的检校ꎬ直接获得影像外方位元素ꎬ从 而实 现 无 像 控 便 可 恢 复 航 空 摄 像 的 成 像 过 程[7 ̄8] ꎮ 较多的免像控无人机通过搭载实时动态 载波相位差分技术( Real ̄Time KinematicꎬRTK) ꎬ 来获取航摄仪的空间位置[9] ꎮ 实际应用中无人 机与基站间的数据传输会受到限制ꎬ无法一直保 持连接ꎬ从而精度会有所降低[10] ꎮ eBeePlus 无人 机内置 RTK 和动态后处理差分 ( Post Processing
浅析无人机航空摄影测量技术在地形测绘中的应用
浅析无人机航空摄影测量技术在地形测绘中的应用摘要:在当今社会背景下,我国的科学技术得到了有效的进步,而科技的进步也使得无人机行业得到了进一步的发展,在无人机行业快速发展的背景之下,我国的无人机航空摄影技术充分的用于相应的地形图测绘工作当中,而无人机航空摄影技术在应用过程中充分的将GPS技术图片处理技术以及低空飞行技术等诸多技术进行了有效的综合,从而使相应的综合型专业技术对于我国的地形图测绘有着极其重要的现实帮助,在当前的背景之下,我国的地貌是具有的复杂性以及相应的环境多样化特性,使得部分地区在测量过程中无法予以有效的进行,而充分利用无人机摄影测量技术,能够对上述问题进行有效的解决,相应的技术在运用过程中拥有着较为简单的操作方式,并且整体成本相对低廉,同时相应的成交效果较为优质,因此也有较为广泛的发展前景。
文章对无人机航空摄影测量在整体地形图测绘的具体应用进行了详细的阐述。
关键词:无人机;航空测量;测绘技术引言科学技术在时代的发展之下为各个行业的发展提供了有效的技术支持,而无人机航空测量技术在应用过程中对于我国航空航天领域有着极其重要的现实性的意义,现实技术在运用过程中,已经被充分的应用到地形图测绘工作当中,并且是整体地形图测绘工作中的重要构成部分,为了进一步使相应的数据所具有的准确性得以有效的提升,相应的航空摄影测量技术已经得到了较为普遍性的应用。
由于整体无人机航空测量摄影在应用过程中的测量速度相对较高,并且整体使用成本相对较低,因此在具体的地形图测绘过程中有着极其重要的现实应用价值。
1对无人机航空摄影测量技术进行详细的分析无人机航空摄影测量技术在应用过程中与传统的航空摄影测量相比,拥有更加灵活以及高效的特征,同时其自身的测测准确性相对较高,在应用中能够对小范围及地貌较为复杂的区域进行综合性的测量,并且能够对高分辨率影像予以有效的获取,相应的无人机航空测量技术的应用过程中能够充分的为整体航空遥感技术的应用提供了具有创新意义的发展方向。
探析无人机航空摄影测量技术在地形测绘中的应用
探析无人机航空摄影测量技术在地形测绘中的应用摘要:现如今,我国经济发展十分迅速,结合地形测量工作的特点可知,通过运用无人机航空摄影测量技术,可以明显提高测量工作效率,帮助测量人员在短时间内获取更多更准确的数据信息,从而为城市规划与各项基础设施建设提供精确数据。
为了确保此项测量技术得到良好运用,本文深入探讨无人机航空摄影测量技术在地形测量过程中的运用要点。
关键词:无人机;航空摄影;测量技术;地形测绘;应用引言传统的地形测绘,由于地势、地形、恶劣天气等不良因素的影响,在测绘中通常会过多消耗人力物力,且成效并不理想。
近几年来,随着无人机技术的不断提升,其相对于传统方法的低付出高回报且操作简单等优势,逐渐让人们发现并应用于实际测量工作当中。
随着时间的推移,更多的无人机航空摄影测量技术被应用在地形测绘中,非常好地解决了以前无法解决的问题,而且在国家航空摄影领域注入了崭新的力量,成为我国航空摄影领域不可或缺的一个重要组成部分,使得国家航空摄影不断向更高的台阶迈进,并且还带动了社会的发展。
该技术不仅仅为国家航空摄影领域注入了新的活力,而且还在农村土地规划上起着重要的作用。
无人机航空摄影测量操作简单,对于农村各类资源匮乏,人工勘测困难且危险提供了一种有效的解决方法,使得农村地形勘测的工作变得更加高效且准确。
1无人机航空摄影测量技术概述在现代社会技术水平提升背景下,无人机航空摄影测量技术的出现大大优化了传统航空摄影测量技术,在技术应用期间,通过在无人机上装设航空摄影仪器,可以实现对地面的连续性拍摄,专业操作人员在对地面控制点的测量和调绘过程中,能够实现对地形图的绘制。
在无人机航空摄影测量技术的作用下,测量工作的精准度更高,并且通过对中心投影透视的变更,还能对投影过程中几何图形进行反转调整。
目前很多行业发展中都加强了对无人机航空摄影测量技术的应用,该技术不仅能在小范围环境中得到应用,还能在地形图测绘中发挥显著优势。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无人机免像控航测技术在地形测量中的应用研究
发表时间:2019-08-02T10:57:47.593Z 来源:《基层建设》2019年第15期作者:殷晓宝
[导读] 摘要:传统的航空摄影测量技术因成本高、现势性不强、受天气条件影响大等原因, 一般用于大范围中小比例尺测量任务。
河北资环勘测工程有限公司宽城分公司河北承德 067600
摘要:传统的航空摄影测量技术因成本高、现势性不强、受天气条件影响大等原因, 一般用于大范围中小比例尺测量任务。
而基于无人机平台的航空测量技术具有成本低、机动灵活、时效性强的特点, 可以快速高效地获取高分辨率影像、数字高程模型DEM和数字正射影像图DOM等数字产品, 在大比例尺测图、灾害应急处理、地理国情监测等领域拥有独特优势, 正逐步成为空间地理信息获取的重要手段。
关键词:无人机;免像控航测技术;地形测量;应用
随着低空遥感技术的发展, 使得无人机测绘技术成为航测领域的一个崭新发展方向。
无人机具有机动灵活、生产周期短等特点, 在小区域和飞行困难地区获取数据方面具有明显优势。
无控无人机通过整合精密测时技术和RTK定位技术来确定每一张相片拍摄的准确位置获取高精度成果, 发挥了其快速高效的优势, 减少了外业工作量。
该无人机由于POS数据精度较高, 省去了外业像控作业, 只需输入一个基站点坐标, 经对齐照片、建立密集点云、生成网格、生成纹理等处理, 可生成DEM、DOM、DLG、DRG等4D数字产品。
1测区概况
该测区位于山西隰县县域, 航飞面积1.8Km2, 地形条件主要以丘陵、山地和平地为主, 设计地面分辨率3cm, 飞行高度388m, 航向重叠85%, 旁向重叠70%。
2采用设备
该测区采用天狼星无控无人机, 该无人机主要由硬件设备系统、影像处理系统、信息分析系统构成:(1) 硬件设备系统:无人机飞行平台、飞行控制系统、地面监控系统、发射与回收系统;遥感任务设备、稳定装置、影像位置和姿态采集系统。
(2) 影像处理系统:影像数据快速检查、纠正、拼接系统;DOM、DEM、DLG生产系统。
(3) 信息分析系统:信息提取、信息分析、报告自动生成、数据管理与检索系统。
3无控无人机航测技术方法
3.1 测区踏勘
利用谷歌地图在测区范围内目测飞行场地, 实地进行踏勘, 确认测区地点、范围、起飞和降落条件。
测区内无禁飞区、机场、军事管理区。
飞机起飞地点地面平坦, 空域视线良好, 场地内无高压塔、成片树林、电杆、石块堆积、房屋等障碍物。
3.2 航线规划
首先确定坐标系统、摄区范围, 根据这些情况, 设置航摄参数, 如航摄分辨率、重叠度、航摄高度等等。
根据测区地形条件及测区形状布设航线, 航线方向为南北向。
航线布设完整覆盖整个测区, 飞行范围超出最外边界线4条基线, 2条航线。
3.3 基站点检查点布设及测量
(1) 基站点选择比较平坦, 面积较大的区域, 视野较开阔, 附近便于飞机的起飞和降落;点位附近无高大建筑物、树木、大面积水域、高压电线、微波通信塔等干扰源, 信号接收无异常干扰。
(2) 观测使用中海达RTK, 其标称精度为:平面± (5mm+1×10-6D) , 高程± (10mm+1×10-6D)。
(3) 采用三角架严密对中, 观测三次, 成果取平均值作为基站坐标值, 每次测量前都重新初始化, 待信号稳定后再继续下一次数据采集。
(4)检查点均匀分配于测区, 分别位于测区的四周和中心, 能够反映地形起伏条件, 具有代表性。
(5) 为了内业判读点位更准确, 在航飞前布设了检查点, 采用白灰布设为矩形“十”字, 长度为1m, 宽度为0.1m, 以“十”字交叉点为检查点位。
3.4 任务飞行
首先进行航线检查, 确保任务覆盖满足要求, 然后根据飞行任务进行安全和应急设置。
检查飞机姿态和拍照是否正常, 检查完毕后, 即可发送航线。
飞机应逆风起飞, 起飞后观察GPS定位精度、飞机姿态、电源电量、飞行轨迹情况。
飞机降落后, 将POS数据和照片下载保存到安全位置;检查相片数据和POS数据是否一致, 相片质量是否清晰完整。
最后关闭自驾仪, 关闭飞机电源, 进行回收作业。
3.5 数据处理
(1) 检查像片和POS文件的完整性和一致性, 检查基站点坐标和天线高。
(2) 在MA Vinci软件中, 把每个架次的基站点坐标和天线垂高对应输入, 坐标系统设置正确, 然后导入到AgisoftPhotoScan软件。
(3) 使用photoscan软件对航摄数据进行处理, 数据质量选择高、中级别, GPS-RTK精度设置为2cm。
再利用基站点进行绝对坐标转换, 经对齐照片、自动像点匹配、不合格点剔除、照片深度匹配、建立密集点云、生成网格、生成纹理等程序, 生成高密度点云、正射影像 (DOM)、地形模型 (DTM) 和高程模型 (DEM) 。
(4) 利用高密度点云生成等高线和高程点, 叠加正射影像、DEM采集地物, 进行等高线编辑、地物绘制, 地形图生产。
4精度验证
本测区利用实测检查点验证了地形图的精度, 同时列出了1∶500地形图数字测图法和航空摄影测量法所要求达到的精度要求。
1∶500地形图数字测图和航测精度要求:
该测区共选取了平地、丘陵、山地和地物检查点共13个, 点位中误差计算方法见公式 (1) :。
公式 (1) 中:△L=sqrt (△x2+△y2)
△x=x-x′
△y=y-y′
经计算, 测区检查点点位中误差为0.13m, 高程中误差为0.11m。
该测区共布设了13个检查点, 地面标靶点7个, 房角点3个, 围墙点3个, 从以上数据可以看出, 地面标靶点精度较高, 房角和围墙点较低。
影像精度的主要因素是地物点存在投影差, 另一方面, 在某一区域像片的质量、飞机的姿态会影响像点匹配精度, 从而影响成果精度。
根据以上数据我们可以得出以下结论:(1) 采用固定翼轻型免像控无人机作为载体, 应用航空摄影测量法进行地形图测绘时, 精度可以满足1∶500数字测图精度要求。
但前提条件是获取到高质量的原始数据, 同时像控、空三加密、测图等环节生产的数据要满足技术要求。
(2) 影响
无人机数据质量的因素很多, 要想获取到高质量的数据, 应在天气条件较好 (无风、雾、霾, 大气透明度高) 的情况下执行飞行作业, 保证飞机的横滚和俯仰角不超限。
原始数据质量较差时, 应进行补充航摄。
(3) 无控无人机采用内置RTK技术快速获取精确的POS点坐标, 省去了繁琐、复杂的外业像控测量, 可以大幅提高生产效率, 节省了人力、物力、财力。
(4) 无控无人机由于生成的正射影像精度高, 可直接在影像上进行地物编绘, 可以利用点云数据生成高程点和等高线, 从而生成地形图。
但在植被茂密的地区应进行人工补测, 提高地形图精度。
如能在地形处理方面加以改进, 将极大地提高生产效率。
结论
本文通过工程实例表明, 在平原地区由天狼星无人机航测系统得到的DEM、DOM能够达到1∶500数字测图的要求, 验证了其在免像控大比例尺地形图测绘中的可行性。
与传统无人机测图相比, 不仅提高了测图精度, 更提高了工作效率。
但是, 本文所选测区面积较小, 且地势较为平坦, 在接下来的工作中, 会继续选择更大范围、地形起伏大的区域进行航测实验, 以提高天狼星无人机航测系统的普适性。
随着无人机技术的发展, 国家低空空域有序开放, 集成了高精度POS系统的免像控无人机航测技术必将成为空间地理信息获取的重要手段, 更广泛地应用于大比例尺地形图测绘、灾害应急处理、智慧城市建设等领域。
参考文献:
[1]李德仁, 李明.无人机遥感系统的研究进展与应用前景[J].武汉大学学报 (信息科学版) , 2014, 39 (5) :505-513
[2]杨尧兰.天狼星无人机摄影测量系统在大比例尺成图中的应用研究[D].昆明:昆明理工大学, 2016
[3]乔瑞亭, 孙和利, 李欣.摄影与空中摄影学[M].武汉:武汉大学出版社, 2018
[4]程崇木, 张俊华, 孙炜, 等.固定翼无人机航空摄影测量精度探讨[J].人民长江, 2017, 41 (11) :54-56。