《控制系统仿真》课程论文模板
自动化控制系统的建模与仿真论文素材

自动化控制系统的建模与仿真论文素材自动化控制系统的建模与仿真自动化控制系统建模与仿真是现代控制工程中非常重要的领域。
通过建立数学模型和使用计算机仿真技术,可以更好地理解和优化控制系统的性能。
本文将就自动化控制系统的建模方法、仿真技术以及在不同领域中的应用等方面进行论述。
一、建模方法在自动化控制系统中,建模是指将实际系统抽象为一种数学模型。
建模方法可以分为两种主要类型:物理建模和黑盒建模。
1. 物理建模物理建模是通过分析系统的物理特性和相互关系,基于物理定律和原理,构建系统的数学模型。
常用的物理建模方法包括:微分方程模型、状态空间模型和传递函数模型等。
2. 黑盒建模黑盒建模是根据实际系统的输入和输出数据,通过统计分析和数据挖掘等方法构建系统的数学模型。
常用的黑盒建模方法包括:神经网络模型、模糊逻辑模型和遗传算法模型等。
二、仿真技术仿真是指利用计算机模拟实际系统的行为和性能,以验证控制算法的有效性和系统的稳定性。
在自动化控制系统中,常用的仿真技术有离散事件仿真和连续仿真。
1. 离散事件仿真离散事件仿真是基于事件驱动的仿真方法,通过模拟系统中离散事件的变化,来推进仿真时钟。
离散事件仿真常用于对具有非线性和时变属性的系统进行建模和仿真。
2. 连续仿真连续仿真是基于时钟驱动的仿真方法,通过不断更新系统的状态和控制输入,来模拟系统的连续变化。
连续仿真常用于对具有线性和时不变属性的系统进行建模和仿真。
三、应用领域自动化控制系统的建模与仿真在各个领域都有广泛的应用。
1. 工业控制在工业生产中,自动化控制系统的建模与仿真可以帮助优化生产过程,提高生产效率和质量。
通过建立模型和仿真验证,可以选择合适的控制策略,降低能耗和生产成本。
2. 智能交通在智能交通系统中,自动化控制系统的建模与仿真可以模拟交通流量、信号控制和车辆调度等系统的行为。
通过仿真分析,可以优化交通流量,减少交通拥堵和事故发生率。
3. 机器人技术在机器人技术领域,自动化控制系统的建模与仿真可以帮助设计和优化机器人的动作规划和控制算法。
控制系统计算机仿真大论文设计
word控制系统计算机仿真大论文1.课程目标1:理解自动控制系统的概念与其在自动化工程中的表现,能对自动化复杂控制系统进展稳定性分析,时域分析,根轨迹法与频域分析,并能针对复杂的自动化系统进展建模和控制算法设计。
〔对应毕业要求指标点1.5〕2.课程目标2:理解自动控制原理与现代控制理论等理论根底,能够根据控制对象特征,选择适宜的控制系统校正方法,并进展有效的系统设计。
〔对应毕业要求指标点4.2〕3.课程目标3:掌握MATLAB软件中关于控制系统建模和控制算法设计的相关操作,能够根据需要完成程序编译与控制效果图的展示,能够进展正确的实验数据处理和分析,并对实验结果进展分析和解释,获得控制系统参数如何影响其控制性能等的有效结论。
〔对应毕业要求指标点4.4〕4.课程目标4:掌握控制科学的仿真软件MA TLAB的根本操作,能针对复杂的自动化系统进展建模,实现各种模型之间的转换与模型连接,掌握系统预测与模拟仿真方法。
〔对应毕业要求指标点5.1〕5.课程目标5:理解复杂控制系统模拟仿真与预测方法的局限性。
〔对应毕业要求指标点5.2〕6.课程目标6:针对自动化复杂工程的控制问题,能提出串级控制、前馈控制、反响速度控制等多种解决方案,并确定满足性能指标要求的控制器设计,能在MATLAB软件中建立合理的控制算法,完成控制器的设计和仿真分析。
〔对应毕业要求指标点5.3〕某某:学号:班级:序号:目录1、MATLAB软件在控制系统仿真中的应用现状与其开展前景1摘要1ABSTRACT2、MATLAB简介3、Simulink简介42、复杂控制系统稳定性、时域分析、根轨迹题5题目:汽车速度控制系统的根轨迹分析5、汽车速度控制系统数学模型的建立5、设计要求6、请依次求解6、汽车速度控制系统题目解答7、三阶系统的根轨迹图7、满足上述条件的系统稳定的Ka的值7、三阶系统的时域性能指标83、复杂控制系统校正题10、题目:直流电机绕线系统控制10、对象介绍10、控制目标设定11、建立系统传递函数11、设计要求11、请依次求解12、直流电机绕线系统控制题目解答12、总体设计框图12、原系统的相角裕度和幅值裕度16、判定稳定性17、滞后-超前校正装置204、心得体会28参考文献29一、小论文题目:MA TLAB软件在控制系统仿真中的应用现状与其开展前景〔不少于1500字〕小论文包括:中文摘要、关键词、英文摘要、英文关键词、正文。
无人机飞行控制系统仿真研究(陕西科技大学)论文正文
无人机的数学模型无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
可反复使用多次,广泛用于空中侦察、监视、通信、反潜和电子干扰等。
因此研究无人机控制系统的设计具有重要意义。
要研究无人机动力学模型的姿态仿真,首先必须建立飞机的数学模型。
在忽略机体震动和变形的条件下,飞机的运动可以看成包含六个自由度的刚体运动,其中包含绕三个轴的三种转动(滚动、俯仰与偏航)和沿三个轴的线运动。
为了确切的描述飞机的运动状态,必须选择合适的坐标系。
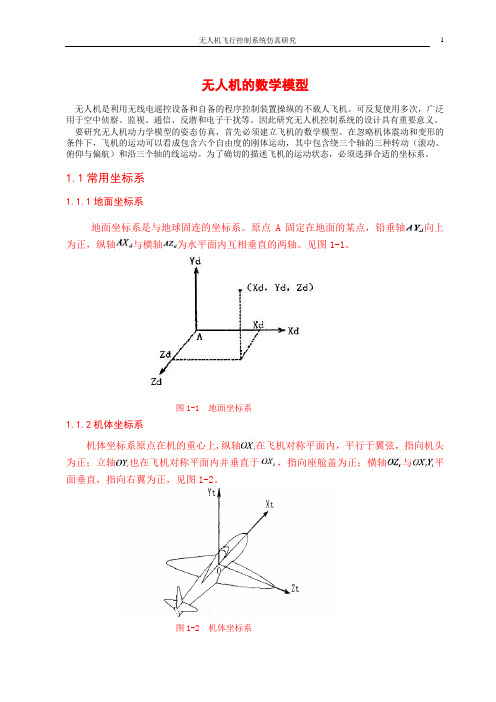
1.1常用坐标系1.1.1地面坐标系地面坐标系是与地球固连的坐标系。
原点A固定在地面的某点,铅垂轴向上为正,纵轴与横轴为水平面内互相垂直的两轴。
见图1-1。
图1-1 地面坐标系1.1.2机体坐标系机体坐标系原点在机的重心上,纵轴在飞机对称平面内,平行于翼弦,指向机头为正;立轴也在飞机对称平面内并垂直于,指向座舱盖为正;横轴与平面垂直,指向右翼为正,见图1-2。
图1-2 机体坐标系1.1.3速度坐标系速度坐标系原点也在飞机的重心上,但轴与飞机速度向量V重合;也在对称平面内并垂直于,指向座舱盖为正;垂直于平面,指向右翼为正,见图2-3。
图1-3 速度坐标系1.2飞机的常用运动参数飞机的运动参数就是完整地描述飞机在空中飞行所需要的变量,只要这些参数确定了,飞机的运动也就唯一地确定了。
因此,飞机的运动参数也是飞机控制系统中的被控量。
被控量包括俯仰角、滚转角、偏航角、仰角、侧滑角、航迹倾斜角,航迹偏转角;同时利用副翼、方向舵、升降舵及油门杆来进行对飞机的控制。
这些称为无人机飞控系统中的控制量。
1.3.1 无人机六自由度运动方程式的建立基于飞机运动刚体性的假设,我们就可以推导出飞机的一般数学模型为一组非线性微分方程组。
根据牛顿定律,其运动方程应由两部分组成:一部分是以牛顿第二定律(动力定律)为基础的动力学方程组,由此解得无人机相对于机体坐标系的角度向量和角速度向量;另一部分则是通过坐标变换关系得出的运动学方程组确定出无人机相对于地面坐标系的位置向量和速度向量。
MATLAB控制系统仿真论文
MA TLAB控制系统仿真论文学院:某某某学院姓名:某某某学号:03021218班级: 03081218 电气指导老师:某某某基于Matlab/Simulink的三相桥式半控整流电路的建模与仿真摘要:三相桥式半控整流电路在现代电力电子技术中具有非常重要的作用。
这里在研究半控整流电路理论基础上,采用Matlab的可视化仿真工具Simulink建立三相桥式半控整流电路的仿真模型,对输出电压、控制角、故障现象以及负载特性进行了动态仿真与研究。
仿真结果表明建模的正确性,并证明了该模型具有快捷、灵活、方便、直观等一系列特点。
关键词:Matlab;整流电路;动态仿真;建模Abstract: Three phase bridge half controlled rectifier circuit plays a very important role in modern power electronic technology.Here in the study of half controlled rectifier circuit based on the theory, simulation model using Matlab visual simulation tool Simulink based three phase half controlled bridge rectifier circuit, and the dynamic simulation and Research on the output voltage, the control angle, faults and load characteristics.The simulation results show that the model is correct, and it is proved that the model is fast, flexible, convenient, intuitive and a series of features.Key word: Matlab; rectifier circuit; dynamic simulation; modeling1 绪论随着社会生产和科学技术的发展,整流电路在自动控制系统、测量系统和发电机励磁系统等领域的应用日益广泛。
基于MATLAB控制系统的仿真与应用毕业设计论文

基于MATLAB控制系统的仿真与应用毕业设计论文目录一、内容概括 (2)1. 研究背景和意义 (3)2. 国内外研究现状 (4)3. 研究目的和内容 (5)二、MATLAB控制系统仿真基础 (7)三、控制系统建模 (8)1. 控制系统模型概述 (10)2. MATLAB建模方法 (11)3. 系统模型的验证与校正 (12)四、控制系统性能分析 (14)1. 稳定性分析 (14)2. 响应性能分析 (16)3. 误差性能分析 (17)五、基于MATLAB控制系统的设计与应用实例分析 (19)1. 控制系统设计要求与方案选择 (20)2. 基于MATLAB的控制系统设计流程 (22)3. 实例一 (23)4. 实例二 (25)六、优化算法在控制系统中的应用及MATLAB实现 (26)1. 优化算法概述及其在控制系统中的应用价值 (28)2. 优化算法介绍及MATLAB实现方法 (29)3. 基于MATLAB的优化算法在控制系统中的实践应用案例及分析对比研究31一、内容概括本论文旨在探讨基于MATLAB控制系统的仿真与应用,通过对控制系统进行深入的理论分析和实际应用研究,提出一种有效的控制系统设计方案,并通过实验验证其正确性和有效性。
本文对控制系统的基本理论进行了详细的阐述,包括控制系统的定义、分类、性能指标以及设计方法。
我们以一个具体的控制系统为例,对其进行分析和设计。
在这个过程中,我们运用MATLAB软件作为主要的仿真工具,对控制系统的稳定性、动态响应、鲁棒性等方面进行了全面的仿真分析。
在完成理论分析和实际设计之后,我们进一步研究了基于MATLAB 的控制系统仿真方法。
通过对仿真模型的建立、仿真参数的选择以及仿真结果的分析,我们提出了一种高效的仿真策略。
我们将所设计的控制系统应用于实际场景中,通过实验数据验证了所提出方案的有效性和可行性。
本论文通过理论与实践相结合的方法,深入探讨了基于MATLAB 控制系统的仿真与应用。
《控制系统仿真》课程论文模板
基于全转速范围内的直接转矩控制调速系统的研究学号姓名成绩摘要:建立了一种包含弱磁控制的直接转矩调速控制系统仿真模型,实现了感应电动机全转速范围内的速度控制,既可以实现同步转速以下的恒转矩调速,又可以实现弱磁范围内的恒功率调节。
仿真结果显示系统的调速性能良好,在换向调速过程中,无抖动和超调现象,很好地实现了电动机调速的四象限特性,弱磁控制过程平稳。
对研究全转速范围内直接转矩调速控制具有较好的参考价值。
关键词:直接转矩控制;调速;弱磁;仿真Research of Direct Torque Control Speed Adjustment Systemwithin Full-speed RangeAbstract: A simulation system of direct torque control speed adjustment system is introduced, it include field-weakening control. The simulation system realized induction-motor speed control within full-speed range, constant torque adjustment less than foundation speed and constant power adjustment greater than foundation speed. The results of simulation show that system performance is excellent. The ripple and overshoot of speed are reduced; the four-quadrant characteristic of induction-motor varying speed is achieved successfully; the field-weakening control is very smooth. The simulation model has better reference meaning for researching direct torque control system within full-speed range.Keyword: direct torque control, adjustment speed, flux weakening, simulation1.引言直接转矩控制系统具有控制结构简单、动态响应快等特点,它在很大程度上解决了矢量控制中计算复杂、特性易受电动机参数变化的影响、实际性能难以达到理论分析结果的一些重要技术问题[1]。
控制系统与仿真论文
《控制系统与仿真》总结报告学院:工学院班级:14级10班姓名:周博学号:14032291这学期我学习了《控制系统与仿真》,控制系统与仿真的类别按照不同的分类方法有不同的分类结果,其中控制系统仿真的过程包括以下几点:1.建立控制系统的数学模型2.建立控制系统的仿真模型3.编程控制系统的仿真程序控制系统仿真的特点包括研究方法简单、方便、灵活、多样而且实验研究成本低并且实验结果充分。
针对自动控制系统的设计很大程度上还依赖于实际系统的反复实验、调整的普遍现象,结合具体的设计实例,教会了我们利用较先进的MATLAB软件中SIMULINK仿真工具来实现对自动控制系统建模、分析与设计、仿真的方法。
它能够直观、快速地分析系统的动态性能、和稳态性能。
并且能够灵活的改变系统的结构和参数,通过快速、直观的仿真达到系统的优化设计。
MATLAB是矩阵实验室(Matrix Laboratory)的简称,是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。
Matlab是一种高效的科学及工程计算语言,它将计算、可视化和编程等功能集于一体,通过方程模型的建立广泛地应用于数学分析、计算、自动控制、系统仿真、数字信号处理、图像处理、数理统计、人工智能、通信工程和金融系统等领域。
通过方程模型的建立主要应用于图像处理、电子信息、神经网络、优化计算、系统识别、系统仿真、数据计算。
SIMULINK是一种强有力的仿真工具,它能让使用者在图形方式下以最小的代价来模拟真实动态系统的运行。
SIMULINK准备有数百种福定义的系统环节模型、最先进的有效积分算法和直观的图示化工具。
依托SIMULINK强健的仿真能力,用户在原型机制造之前就可建立系统的模型,从而评估设计并修复瑕疵。
SIMULINK具有如下的特点:(1)交互式的仿真分析。
控制系统仿真论文
内蒙古科技大学控制系统仿真课程设计说明书题目:单神经元PID控制系统仿真学生姓名:学号:专业:测控技术与仪器班级:指导教师:中文摘要PID控制以其原理简单,可靠性高等优点被广泛应用在现代工业控制领域。
然而在工业实际控制中,被控对象往往还具有高度的非线性,不确定性和参数时变等特点,在这种情况下单纯依靠PID控制是不能达到要求的。
神经网络控制系统作为新兴发展的智能控制系统,能很好地解决上述问题,已经在很多领域得到应用,同时也显示了它的优越性。
单神经元作为构成神经网络的基本单元,具有自学习和自适应能力,且结构简单而易于计算。
基于以上分析,在PID控制中引入单神经元自适应算法,这样既可以解决传统PID控制器的不足,同时又能充分利用PID控制技术成熟的优势。
通过仿真对比发现单神经元自适应PID控制器比传统的PID控制器控制效果好。
关键词: 单神经元;自适应PID控制;神经网络;第一章 前言1.1引言人工神经网络ANN(artificial neural network)是最近发展起来的十分热门的交叉学科。
它涉及生物、电子计算机、数学、和物理等学科,有着非常广泛的应用背景,这门学科的发展对目前和未来的科学技术的发展将有着重要的影响。
以大规模并行处理为主要特征的神经网络具有学习、记忆、联想、容错、并行处理等能力,已在控制领域得到广泛的应用。
基于神经网络的PID 控制,其结构方式有两类:一类是单神经元控制,即神经元输入权值一一对应PID 参数,神经元输入值为经过比例、积分、微分处理的偏差值,其主要局限性在于单神经元结构无任意函数逼近能力;另一类是在常规PID 控制器的基础上增加一个神经网络模块,按照BP 学习算法(如前向算法和反传算法)进行离线学习,实时调整出PID 参数,同时还要继续学习不断地调整神经网络中各神经元间权系数,以适应被控对象的变化,因此,具有很强的适应性。
1.2单神经元模型对人脑神经元进行抽象简化后得到一种称为McCulloch-Pitts 模型的人工神经元,如图1.1所示。
基于LabVIEW的控制系统仿真毕业设计(论文)
本课题是基于虚拟仪器技术,开发一种交互式实验教学模块,实现常见的典型控制系统的仿真。输入相关参数,即可得出仿真结果;将抽象的、静态的理论知识转化为具体的、动态的演示模型。根据教学需要,将控制理论中常见的、典型的实例利用相关软件工具(如LabVIEW、MATLAB等)实现建模、分析、设计过程的仿真,一方面有利于理论教学工作的开展;另一方面对于实验教学会起到一定的指导作用;此外控制系统的综合设计也将有利于学生综合掌握控制理论,而不是将控制理论看作章节割裂的理论。以上几点对于教学实际具有非常现实的意义。
This paper describes the thinking and design process of the system in details. Theoretical analysis and algorithm analysis for the sub-module and Virtual Instrument programs writing are the main parts. It also discusses the dynamic program invocation and publishing applications and so on.
锅炉控制系统设计仿真毕业论文
锅炉控制系统设计仿真摘要工业锅炉作为我国工业生产和集中供热的重要能源转换设备,能耗巨大,长期处在高能耗、高污染的生产状态。
然而,目前我国大多数锅炉控制系统自动化不高、安全性低,效率普遍低于国家标准。
锅炉作为将一次能源转化为二次能源的重要设备之一,提高锅炉控制水平已势在必行。
本文针对锅炉系统参数时变、严重非线性、干扰因素复杂等特点,提出对汽包水位采用三冲量控制方式,对炉膛负压采用前馈PID控制,对最优风煤比采用双交叉限幅比值控制的控制策略。
在MATLAB环境下对几种控制系统进行了仿真。
仿真结果显示,三冲量控制、前馈PID和双交叉限幅比值控制具有良好的控制效果,减小了超调量,提高了上升时间,缩短了调节时间,与传统的PID控制器相比,更适合工业锅炉这种复杂的控制对象。
关键词:锅炉三冲量控制前馈PID控制双交叉限幅比值控制IAbstractAs central heating in industrial production and the important energy conversion equipment in China, industrial boiler consumes enormous energy,and stays at high energy consumption and pollution production status. However, at present the majority of automatic boiler control system is not high, the security is low and the efficiency is generally lower than the national standard. Because the boiler is one of the important equipment which converses primary energy into secondary energy, improving the level of boiler control is imperative.In view of many factors of the boiler system, such as time-varying parameters, severely nonlinear and complex interference factors and so on , this paper puts forward three control strategies, including using three-impulse control, utilizing feed forward PID control to hearth negative pressure, and adopting double crossover restricts the amplitude ratio control to the optimal air fuel ratio. Several control systems are simulated in the MATLAB environment. The simulation results shows that three-impulse control, feed forward PID control and double crossover restricts the amplitude ratio control have good control effect, which reduce the overshoot, improve the rise time and reduce adjustment time. Compared with the traditional PID controller, these control systems are more suitable for the industrial boiler, a kind of complex control object.Key words: The Boiler, Three-impulse Control,Feed forward PID Control, Double Cross Restricts the Amplitude Ratio ControlIIIII目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 选题背景及意义 (1)1.2 国内外锅炉的运行水平 (1)1.3 制约我国锅炉发展的因数 (2)1.3.1 大多数锅炉制造厂技术力量仍然薄弱 (2)1.3.2 燃料的因素 (2)1.3.3 工业锅炉的标准体系 (2)1.3.4 市场机制的影响及科研开发投入的不足 (2)1.3本文研究的主要内容 (2)第2章锅炉系统的控制任务 (3)2.1 锅炉系统的工艺流程简介 (3)2.2 锅炉自动控制系统的任务 (4)2.3 PID控制规律介绍 (4)本章小结 (5)第3章汽包水位三冲量控制 (6)3.1 汽包水位系统介绍 (6)3.2 汽包水位的动态特性分析 (6)3.3 锅炉汽包水位的控制方案 (8)3.3.1 单冲量控制系统 (9)3.3.2 双冲量控制系统 (9)3.3.3 三冲量控制系统 (10)本章小结 (10)第4章炉膛负压控制 (11)4.1 控制和监视炉膛负压的意义 (11)4.2 炉膛负压控制 (11)本章小结 (12)第5章最优风煤比控制 (13)5.1 常规PID风煤比控制系统的缺陷 (13)5.2 双闭环交叉限幅比例控制 (13)5.3 温度串级控制 (14)5.4 控制过程分析 (15)本章小结 (16)第6章 MATLAB/Simulink仿真 (17)6.1 MATLAB软件介绍 (17)6.2 汽包水位控制MATLAB仿真 (17)6.3 炉膛负压控制仿真 (18)6.4 最优风煤比控制仿真 (19)本章小结 (20)结论 (22)参考文献 (23)致谢 (24)II第1章绪论1.1选题背景及意义锅炉作为能源转换的重要设备,运行情况的好坏直接关系到能源的利用率高低。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于全转速范围内的直接转矩控制调速系统的研究摘要:建立了一种包含弱磁控制的直接转矩调速控制系统仿真模型,实现了感应电动机全转速范围内的速度控制,既可以实现同步转速以下的恒转矩调速,又可以实现弱磁范围内的恒功率调节。
仿真结果显示系统的调速性能良好,在换向调速过程中,无抖动和超调现象,很好地实现了电动机调速的四象限特性,弱磁控制过程平稳。
对研究全转速范围内直接转矩调速控制具有较好的参考价值。
关键词:直接转矩控制;调速;弱磁;仿真Research of Direct Torque Control Speed Adjustment Systemwithin Full-speed RangeAbstract: A simulation system of direct torque control speed adjustment system is introduced, it include field-weakening control. The simulation system realized induction-motor speed control within full-speed range, constant torque adjustment less than foundation speed and constant power adjustment greater than foundation speed. The results of simulation show that system performance is excellent. The ripple and overshoot of speed are reduced; the four-quadrant characteristic of induction-motor varying speed is achieved successfully; the field-weakening control is very smooth. The simulation model has better reference meaning for researching direct torque control system within full-speed range.Keyword: direct torque control, adjustment speed, flux weakening, simulation1.引言直接转矩控制系统具有控制结构简单、动态响应快等特点,它在很大程度上解决了矢量控制中计算复杂、特性易受电动机参数变化的影响、实际性能难以达到理论分析结果的一些重要技术问题[1]。
直接转矩控制采用双滞环控制策略,电机在运行中转矩及定子磁链脉动较大,影响了电机运行的稳定性,所以研究的焦点大都集中在减小转矩及定子磁链脉动上[2-3]。
为了提高定子磁链的估计精度,改善直接转矩控制系统的动静态性能等,提出了多种行之有效的减小脉动方法[4-6]。
在直接转矩的调速控制方面,有同步转速以下恒转矩调速的研究[7],也有基于弱磁范围内的速度控制等[8],但基于全速度范围内的控制仿真研究还不多见[9,10]。
本文建立了一种直接转矩控制的感应电动机变频调速系统仿真模型,可以实现电动机全转速范围内的速度控制。
所谓全转速范围,是指电动机调速系统既可以实现同步转速以下的恒转矩调速,又可以实现弱磁范围内的恒功率调节,而且能实现转速的四象限运行特性。
2.直接转矩控制调速系统的建模直接转矩控制(Direct Torque Control,DTC),是基于动态模型的双闭环控制系统。
外环采用转速闭环,控制转速的大小;内环采用磁链和转矩滞环比较控制,产生转矩的快速动态响应。
2.1 磁链与转矩控制要进行磁链和转矩滞环的闭环控制,必须取得异步电动机的定子磁链和电磁转矩,磁链观测和转矩观测通常采用的数学表达式为:dtRtitutssss))()(()(-=⎰ψ(1))(23βααβψψsssseiiPT-=(2)式中:s(t)为定子磁链,u s(t)为定子相电压,i s(t)为定子相电流,R s为定子电阻,P 为电机极对数,s ,s 为定子磁链在坐标轴上的分量,i s ,s为定子电流在坐标轴上的分量。
12H ψ2bw F -2bw F Dψ12H Te 2bw T -2bw T 3(a )磁链滞环 (b )转矩滞环图1 磁链、转矩滞环调节器Fig.1 the relay adjustor of torque and flux[0 or 1][0 or 3][0 or 2][1 or 2]2H_Te1H_phidTe/2dPhiNORLogical Operator H_Te, phi2ConvertData Type Conversion -dTe/243Torque2Flux*1Torque*图2 转矩和磁链滞环调节器的仿真模型 Fig.2 the model of relay adjustor of torque andfluxβs 1αU 1(100)s 3s 5U 2(110)U 3(010)U 4(011)U 5(001)U 6(101)图3 磁链圆扇区的划分 Fig.3 the division of sector磁链、转矩控制仿真模型如图2所示,转矩滞环调节器由两个滞环比较器的输出相加,同时两个输出经过异或逻辑运算(NOR ),数据类型转换(Convert ),再乘以2,最终输出为0或2。
磁链滞环调节器调节器的输出为1或2。
磁链滞环环宽F bm 设定为0.02Wb ,转矩滞环环宽T bw 设定为10N.m 。
磁链和转矩滞环比较输出为H _Te 和H _phi 。
图4为转矩和磁链观测及磁链角计算仿真模型。
逆变器输出的三相电压u a,b,c 进行3/2 i_sai_sa 3angle2Flux 1TorqueK Ts (z+1)2(z-1)phi_sbK Ts (z+1)2(z-1)Vabcv_sav_sbVabc/VdqRe Im ComplexI_abI_qI_dIabc/Idq-1-K--K-|u|uComplex to Magnitude-Angle-K-3p/2-K-2V_abc1I_abi_sbi_sb图4 转矩和磁链观测及磁链角计算仿真模型Fig.4 the calculation mode of torque, flux and it ’s angle1sectorSaturation<=><=><=><=>>><=<=Relational Operator.ANDANDORANDANDAND654321ConvertConvertConvertConvertConvertConvert-90-150-150150*********-30-9030-301angle图5 磁链扇区的计算模型Fig.5 the calculation model of flux sector变换得到u s 、u s ,i a,b,c 进行3/2变换得到i s 、i s ,再通过离散积分模块(Discrete-Time Integrator ),可以计算出定子磁链分量s 、s 。
根据式(2),利用两个乘法器(Product )和一个加法器(Sum )模块,可以计算出实际转矩值T e 。
利用定子磁链分量s 、s ,可以计算出磁链幅值s 和磁链角。
为了简化计算,图4采用了将定子磁链分量s 、s 构成一个复数(Real-Imag to Complex ),然后用求复数模和复角模块(Complex to Magnitude -Angle ),输出磁链幅值s 和磁链角。
1.2 定子磁链扇区的计算定子磁链扇区将磁链圆等分为六等份,每个扇区间隔60o,用S n 表示,定子电压矢量和扇区的划分如图4所示。
磁链角的初始线(=0)与电压矢量U 1(100)的方向相同,扇区S 1确定为U 1(100)的方向线±30o的扇形区域,S 2定为U 2(110)的方向线±30o的扇形区域,以此类推可定义出六个扇区S 1-S 6。
扇区计算模型如图5所示,六个扇区的判断主要采用关系比较模块和逻辑运算模块。
由于磁链角的取值范围为[-180o ,+180o],所以S 4的确定关系式为>150o 和≤-150o,两者为“或”的关系,其它扇区的关系均为“与”的关系。
1.3开关选择表的建立假定定子磁链位于扇区S 1,并以逆时针方向。
当实际磁链达到下限值,>0,H =1,则需用非零电压矢量来增加磁链,此时分两种情况:(1)电磁转矩幅值达到下限,T >0, H Te =1,则选取电压矢量U 2(110),达到同时增加转矩和磁链的目的;(2)电磁转矩幅值达到上限,T <0,H Te =3,则用电压矢量U 6(101),达到增加磁链和减少转矩的目的。
如果此时T =0,H Te =2,可以插入零电压矢量U 0或U 7。
由此可以确定异步电动机直接转矩控制系统的开关选择表(见表1),零电压U 0、U 7的选择以减少开关切换次数为原则。
电压矢量U 0~U 7对应逆变器六只开关器件的开关状态如表2所示。
三相逆变器的开关状态顺序分别为[a+,a-,b+,b-,c+,c-],例如[1,0,0,1,1,0],表示a 相上桥臂、b 相下桥臂、c 相上桥臂开通,a 相下桥臂、b 相上桥臂、c 相下桥臂关断。
开关选择表的仿真模型如图6所示,开关表由两个二维查表函数(lookup2D )来实现。
当>0,H =1,选择第一个查表函数;当<0,H =2,选择第二个查表函数。
查表函数(lookup2D )参数的设置与开关表相对应,为3行6列矩阵,输出填入与开关表相对应的电压矢量值0~7。
当磁链偏差H 、转矩偏差H Te 、扇区S n 确定后,即可输出惟一的电压矢量值。
电压矢量值加1,送入8选1多路转换开关(Multiport switch ),电压矢量值转换成逆变器的开关状态,即6路PWM 脉冲。
1Gates(1 0 1 0 1 0)v7(1 0 0 1 1 0)v6(0 1 0 1 1 0)v5(0 1 1 0 1 0)v4(0 1 1 0 0 1)v3(1 0 1 0 0 1)v2(1 0 0 1 0 1)v1(0 1 0 1 0 1)v0Switch2Multiport Switch1Flux =2Flux = 113Sn2H Te 1H Phi t图6 开关选择表的仿真模型Fig.6 the simulation model of switching optiontable表1 电压矢量开关选择表Tab.1 switching option table of voltage vectorHH TeS n12345611U 2 U 3 U 4 U 5 U 6 U 1 2 U 0 U 7 U 0 U 7 U 0 U 7 3 U 6 U 1 U 2 U 3 U 4 U 5 21U 3 U 4 U 5 U 6 U 1 U 2 2 U 7 U 0 U 7 U 0 U 7 U 0 3U 5U 6U 1U 2U 3U 4表2 电压矢量与开关状态对应关系 Tab.2 the relation of voltage vectorand switching state 电压矢量逆变器的开关状态 U 0(000) 0,1,0,1,0,1 U 1(100) 1,0,0,1,0,1 U 2(110) 1,0,1,0,0,1 U 3(010) 0,1,1,0,0,1 U 4(011) 0,1,1,0,1,0 U 5(001)0,1,0,1,1,0 U 6(101) 1,0,0,1,1,0 U 7(111)1,0,1,0,1,01.4 速度控制器直接转矩控制系统外环为速度控制器,速度调节器一般采用带有饱和特性和带输出限幅的PI 调节器。