Entanglement swapping using continuous variables
fluent在复杂传热情况下的参数设置
1, WINDOEWS NT 下,点击 FLUENT5。 2, 在 MS-DOS 下,键入命令。 FLUENT 2D/3D/2ddp/3ddp。平行计算命令为:FLUENT
2D/3D/2ddp/3ddp -t x 。x 是处理器编号。如,我们用 3 号处理器计算三维双精度问题, 命令为: FLUENT 3ddp –t3
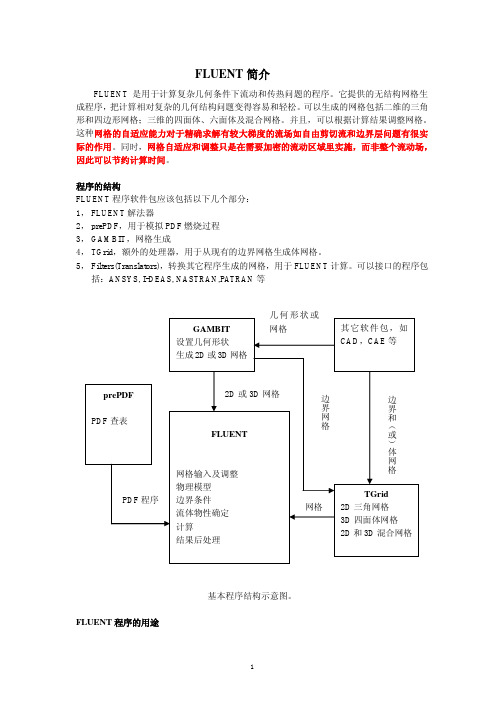
FLUENT 简介
FLUENT 是用于计算复杂几何条件下流动和传热问题的程序。它提供的无结构网格生 成程序,把计算相对复杂的几何结构问题变得容易和轻松。可以生成的网格包括二维的三角 形和四边形网格;三维的四面体、六面体及混合网格。并且,可以根据计算结果调整网格。 这种网格的自适应能力对于精确求解有较大梯度的流场如自由剪切流和边界层问题有很实 际的作用。同时,网格自适应和调整只是在需要加密的流动区域里实施,而非整个流动场, 因此可以节约计算时间。
∂t
r ∂x
r ∂r
∂x
+
1 r
∂ ∂x
rµ 2
∂u ∂x
−
2 3
(∇
⋅
vr )
+
1 r
∂ ∂r
rµ
∂u ∂r
+
∂v ∂x
+
Fx
2-4
和
∂ (ρv) + 1 ∂ (rρuv) + 1 ∂ (rρvv) = − ∂p
∂t
r ∂x
r ∂r
∂r
+
1 r
∂ ∂x
rµ
∂v ∂x
+
∂u ∂r
+
1 r
∂ ∂r
rµ
流体 2
流体 1
Matlab仿真参数设置

关于powergui因为e080067的帖子才有此想法,先把这里贴过来。
powergui有三种运行模式:continous、discretephasorcontinous和discrete的用法区别在于,小型系统(状态量10个以下)用continous运行比较好,时间不是问题,精确度较高;但是大型系统或者电路中有电力电子器件就建议用discrete来运行,solver里边要设置成定步长,nocontinousstate步长根据经验自己设置(没经验可以先试几次,从小到大设置一下,两次运行结果差异不大以后就用步长大的为准),会影响模拟总时间和结果的精确性。
一般用来模拟电力电子,有igbt等开关。
phasor就是稳态模型,没有状态量。
simulink里的各solver的含义以及适用范围总结:ode45绝对是第一选择,当你弄不清情况的时候都可以选它。
但是如果遇到刚性系统时,运算会很慢很慢,这时候你可以选择ode23tb算法(有关资料显示这个算法收敛速度较快)。
如果还不行,那你就可以考虑选择discrete方式了。
当然,这是万金油式选择,对我这种菜鸟来说这样足够了。
但如果对算法有研究的大湿们,当然可以具体情况具体分析了。
注:刚性系统是指描述系统的微分方程中包含有数个(大于等于2)相互作用的变量且各个变量变化速度十分悬殊的系统如何提高simpowersystem的仿真速度1使用ode23解法器(大家可能都知道)但效果很有限。
2对系统离散化,方法为在你的gui模块里选择discretizeelectricmodel,采样时间越大仿真越快,当然采样时间的设定要与你对系统精确性相配合,因为采样时问是与准确性成反比的3在仿真的过程中尽量少开启示波器窗口,示波器参数中的点数限制最好关闭4如果你的系统要从一个特定的状态开始仿真,在仿真参数设置是,最好在i/o选项中设置起始的状态矢量5开启加速器,(方法在菜单仿真这一项中可以设置),这个也能大大加快仿真速度。
高等量子力学和量子力学的区别
高等量子力学和量子力学的区别英文回答:The difference between advanced quantum mechanics and quantum mechanics lies in the level of complexity and mathematical formalism used in each field. Quantum mechanics is the branch of physics that describes the behavior of particles at the atomic and subatomic level. It is based on a set of mathematical principles and equations, such as the Schrödinger equation, which can be used to calculate the probabilities of different outcomes in quantum systems.Advanced quantum mechanics, on the other hand, builds upon the foundation of quantum mechanics and delves deeper into more complex and abstract concepts. It involves the study of advanced mathematical techniques, such as group theory and operator theory, to describe and analyze quantum systems. Advanced quantum mechanics also explores topics like quantum field theory, quantum information theory, andquantum many-body systems.To illustrate the difference between the two, let's consider the concept of entanglement. In quantum mechanics, entanglement refers to the phenomenon where two or more particles become linked together in such a way that the state of one particle cannot be described independently of the state of the other particles. This is famously described as "spooky action at a distance" by Albert Einstein.In advanced quantum mechanics, the study of entanglement goes beyond just understanding its existence. Researchers in this field investigate how entanglement can be used for quantum teleportation, secure communication, and quantum computing. They develop more sophisticated mathematical tools to quantify and manipulate entanglement, such as entanglement entropy and entanglement swapping.In summary, while quantum mechanics provides the foundational principles and equations for understanding the behavior of particles at the quantum level, advancedquantum mechanics takes a more advanced and mathematical approach to explore complex phenomena and applications of quantum systems.中文回答:高等量子力学和量子力学的区别在于所涉及的复杂程度和数学形式主义的使用。
李雅普诺夫稳定性自动化专业英语词汇表
.李雅普诺夫稳定性自动化专业英语词汇表公告记录成长的脚印,分享败绩、成功的智慧。
(大部门日记转自采集,如有侵权,即删。
) 日记总数: 47 品题数目: 42 访问次数: 15577 acceptance testing 验收测试 accumulated error积累误差 ac-dc-ac frequency converter 交-直-交变频器 ac(alternatingcurrent)electric drive交流电子传动 active attitude stabilization主动姿态稳定 actuator 驱动器,执行机构 adaline 线性适应元daptation layer适应层 adaptive telemeter system 适应遥测系统 adjoint operator 陪同算子 admissible error容许误差 aggregationmatrix结集矩阵ahp(analytic你好 erarchy process)条理分析法 amplifying element放大环节analog-digital conversion模数转换 ntenna pointing control接收天线指向控制anti-integral windup抗积分饱卷 aperiodic decomposition非周期分解 a posteriori estimate笱楣兰?approximate reasoning类似推理 a priori estimate 先验估计 articulated robot关节型机器人 assignment problem配置问题,分配问题 associative memory model遐想记忆模子 asymptotic stability渐进稳定性 attained pose drift现实位姿漂移 attitude acquisition姿态捕获aocs(attritude and orbit control system)姿态轨道控制系统 attitude angular velocity姿态角速度 attitude disturbance姿态扰动 attitude maneuver 姿态机动 augment ability可扩充性 augmented system增广系统 automatic manual station不用人力-手动操作器 autonomous system自治系统 backlash characteristics间隙特征 base coordinate system基座坐标系bayes classifier 贝叶斯分类器 bearing alignment 方位瞄准 bellows pressure gauge 波纹管压力表 benefit-cost analysis 收入成本分析 bilinear system 双线性系统 biocybernetics 生物控制论 biological feedback system 生物反馈系统black box testing approach 黑箱测试法 blind search 盲目搜索 block diagonalization 块对于角化 boltzman mac 你好 ne 玻耳兹曼机 bottom-up development 自下而上开辟 boundary value analysis 界限值分析 brainstorming method 头脑风暴法 breadth-first search 广度优先搜索 cae(computer aided engineering) 计较机匡助工程 cam(computer aided manufacturing) 计较机匡助创造 camflex valve 偏疼旋转阀 canonical state vari able 标准化状况变量capacitive displacementtransducer 电容式位移传感器 capsule pressure gauge 膜盒压力表 card 计较机匡助研究开辟 cartesian robot 直角坐标型机器人cascadecompensation 串联赔偿 catastrophe theory 突变论 chained aggregation 链式结集 characteristic locus 特征轨迹 chemical propulsion 化学推进classical information pattern 经典信息标准样式 clinical controlsystem 临床控制系统关上 d loop pole 闭环极点关上 d looptransfer function 闭环传递函数cluster analysis 聚类分析 coarse-finecontrol 粗- 精控制 cobweb model 蜘蛛网模子 coefficient matrix 凳?卣?cognitive science 认知科学 coherent system 枯燥关接洽统 combination decision 组合决定计划 combinatorial explosion 组合爆炸combined pressure and vacuum gauge 压力真空表 command pose 指令位姿companion matrix 相伴矩阵 compartmental model 房室模子 compatibility 相容性,兼容性 compensating network 赔偿采集 compensation 赔偿,矫正compliance 柔顺, 适应 composite control 组合控制 computable general equilibrium model 可计较普通均衡模子 conditionallyinstability 条件不稳定性connectionism 毗连机制 conservative system 守恒系统 constraint condition 约束条件 consumption function 消费函数 context-free grammar 上下文无关语法continuous discrete eventhybrid system simulation 连续离散事件混淆系统仿真continuous duty 连续事情制 control accuracy 控制精密度 control cabinet 控制柜controllability index 可控指数 controllable canonical form 可控标准型[control]plant 控制对于象,被控对于象 controlling instrument 控制仪表 control moment gyro 控制力矩捻捻转儿 control panel 控制屏,控制盘 control synchro 控制 [式]自整角机 control system synthesis 控制系统综合 control time horizon 控制时程 cooperativegame 互助对于策 coordinability condition 可协调条件coordinationstrategy 协调计谋 corner frequency 迁移转变频率 costate variable 蔡?淞?cost-effectiveness analysis 用度效益分析 coupling ofrbit and attitude 轨道以及姿态耦合 critical damping 临界阻尼 ritical stability 临界稳定性 cross-over frequency 穿越频率,交越频率 current source inverter 电流[源]型逆变器 cut-off frequency 截止频率 cyclic remote control 循环遥控 cylindrical robot 圆柱坐标型机器人 damped oscillation 阻尼振动 damping ratio 阻尼比 data acquisition 数值采集 data encryption 数值加密 data preprocessing 数值预处理 data processor 数值处理器 dc generator-motor set drive 直流发机电-电动机组传动 d controller 微分控制器 decentralizedstochastic control 分散 rand 控制 decision space 决定计划空间 decisionsupport system 决定计划支持系统 decomposition-aggregation approach 分解结集法 decoupling parameter 解耦参量 deductive-inductive hybrid modeling method 演绎与归纳混淆建模法 delayed telemetry 延时遥测derivation tree 导出树 derivative feedback 微分反馈 describingfunction 描写函数 desired value 希望值deterministic automaton 确定性不用人力机 deviation alarm 误差报警器 dfd 数值流图 diagnosticmodel 诊断模子 diagonally dominant matrix 对于角主导矩阵diaphragmpressure gauge 膜片压力表 difference equation model 差分方程模子differential dynamical system 微分动力学系统 differential game⒎侄圆differential pressure level meter 差压液位计 differentialpressure transmitter 差压变送器 differential transformer displacementtransducer 差动变压器式位移传感器 differentiation element 微分环节 digital filer 数码滤波器 digital signal processing 数码旌旗灯号处理 digitizer 数码化仪 dimension transducer 尺度传感器 direct coordination 直接协调 discrete event dynamic system 离散事件动态系统 discretesystem simulation language 离散系统仿真语言 discriminant function 判别函数 displacement vibration amplitude transducer 位移波幅传感器dissipative structure 耗扩散局 distributed parameter control system 漫衍参量控制系统 disturbance compensation 扰动赔偿 domain knowledge 范畴常识dominant pole 主导极点 dose-response model 剂量反映模子 dual modulation telemetering system 两重调制遥测系统 dualprinciple 对于偶原理 dual spin stabilization 双自旋稳定 duty ratio 负载比 dynamic braking 能耗制动 dynamic characteristics 动态特征 dynamic deviation 动态误差 dynamic error coefficient 动态误差系数 dynamic exactness 动它吻合性 dynamic input-outputmodel 动态投入产出模子 econometric model 计量经济模子 economiccybernetics 经济控制论 economic effectiveness 经济效益 economicvaluation 经济评价 economic index 经济指数 economic in dicator 经济指标 eddy current t 你好 ckness meter 电涡流厚度计 effectivenesstheory 效益意见 elasticity of demand 需求弹性 electric actuator 电动执行机构 electric conductancelevelmeter 电导液位计 electricdrive control gear 电动传动控制设备 electric hydraulic converter 电-液转换器 electric pneumatic converter 电-气转换器electrohydraulicservo vale 电液伺服阀 electromagnetic flow transducer 电磁流量传感器 electronic batc 你好 ng scale 电子配料秤 electronic belt conveyorscale 电子皮带秤 electronic hopper scale 电子料斗秤 emergencystop 异样住手empirical distribution 经验漫衍 endogenous variable 内发生变故量equilibrium growth 均衡增长 equilibrium point 平衡点 equivalence partitioning 等价类区分清晰 error-correction parsing 纠错剖析 estimation theory 估计意见 evaluation technique 评价技术 event chain 事件链evolutionary system 高级演化系统 exogenous variable 外发生变故量 expected characteristics 希望特征 failure diagnosis 妨碍诊断 fast mode 快变模态 feasibility study 可行性研究 feasiblecoordination 可行协调 feasible region 可行域 feature detection 特征检测 feature extraction 特征抽取 feedback compensation 反馈赔偿 feedforward path 前馈通路 field bus 现场总线 finite automaton 有限不用人力机 fip(factory information protocol) 工场信息以及谈 first order predicate logic 一阶谓词逻辑 fixed sequence manipulator 固定挨次机械手 fixed set point control 定值控制 fms(flexiblemanufacturing system) 柔性创造系统 flowsensor/transducer 流量传感器 flow transmitter 流量变送器 forced oscillation 强迫振动 formal language theory 情势语言意见 formal neuron 情势神经元forward path 正向通路 forward reasoning 正向推理 fractal 分形体,分维体frequency converter 变频器 frequency domain modelreduction method 频域模子降阶法 frequency response 频域相应 full order observer 全阶测候器 functional decomposition 功效分解 fes(functional electricalstimulation)功效电刺激 functionalsimularity 功效相仿 fuzzy logic 含糊逻辑 game tree 对于策树 general equilibrium theory 普通均衡意见 generalized least squaresestimation 意义广泛最小二乘估计 generation function 天生函数geomagnetictorque 地磁性矩 geometric similarity 几何相仿 gimbaled wheel 蚣苈global asymptotic stability 全局渐进稳定性 global optimum 全局最优 globe valve 球形阀 goal coordination method 目标协调法 grammatical inference 文法判断 grap 你好 c search 图搜索 gravitygradient torque 重力梯度力矩 group technology 成组技术 guidancesystem 制导系统 gyro drift rate 捻捻转儿漂移率 hall displacementtransducer 霍尔式位移传感器 hardware-in-the-loop simulation 半实物仿真 harmonious deviation 以及谐误差 harmonious strategy 以及谐计谋 heuristic inference 开导式推理你好 dden oscillation 隐蔽振动你好 erarc 你好 calchart 条理布局图你好 erarc 你好 cal planning 递阶规划你好 erarc你好 calontrol 递阶控制 homomorp 你好 c model 同态系统 horizontal decomposition 横向分解 hormonal control 内排泄控制 hydraulic step motor 液压步进马达 hypercycle theory 超循环意见 i controller 积分控制器 identifiability 可辨识性 idss(intelligent decision support system)智能决定计划支持系统 image recognition 图象辨认 impulse function 冲击函数,电子脉冲函数 incompatibility principle 不相容原理 incrementalmotion control 增量运动控制 index of merit 品质因数 inductiveforce transducer 电感式位移传感器 inductive modeling method 归纳建模法 industrial automation 工业不用人力化 inertial attitude sensor 惯性姿态敏锐器 inertial coordinate system 惯性坐标系 inertialwh eel 惯性轮 inference engine 推理机 infinite dimensional system 无限维系统information acquisition 信息采集 infrared gasanalyzer 红外线气体分析器 inherent nonlinearity 本来就有非线性 inherent regulation 本来就有调节 initial deviation 初始误差 injection attitude 入轨姿式input-output model 投入产出模子 instability 不稳定性 instructionlevel language 指令级语言 integral of absolute value of errorcriterion 绝对于误差积分准则integral of squared error criterion 平方误差积分准则 integral performance criterion 积分性能准则 integration instrument 积算摄谱仪 intelligent terminal 智能终端 interactedsystem 互接洽统,关接洽统 interactive prediction approach 互联预估法,关联预估法 intermittent duty 断续事情制ism(interpretivestructure modeling) 诠释布局建模法 invariant embedding principle 不变镶嵌原理 inventory theory 库伦论 inverse nyquist diagram 逆奈奎斯特图 investment decision 投资决定计划 isomorp 你好 c model 同构模子iterative coordination 迭代协调 jet propulsion 喷气推进 job-lot control 分批控制kalman-bucy filer 卡尔曼-布西滤波器 knowledgeaccomodation 常识适应knowledge acquisition 常识获取 knowledgessimilation 常识夹杂kbms(knowledge base management system) 常识库管理系统 knowledge representation 常识抒发 lad der diagram 菪瓮?lag-lead compensation 滞后超前赔偿 lagrange duality 拉格朗日对于偶性 laplace transform 拉普拉斯变换 large scale system 大系统 lateral in 你好 bition network 侧抑制采集 least cost input 最小成本投入 least squares criterion 最小二乘准则 level switch 物位开关 libration damping 天平动阻尼 limit cycle 极限环 linearizationtechnique 线性化要领 linear motion electric drive 直线运动电气传动 linear motion valve 直行程阀 linear programming 线性规划 lqr(linear quadratic regulator problem) 线性二次调节器问题 oad cell 称重传感器 local asymptotic stability 局部渐近稳定性 local optimum 局部最优 log magnitude-phase diagram 对于数幅相图long term memory 长期记忆 lumped parameter model 集总参量模子 lyapunov theorem of asymptotic stability 李雅普诺夫渐近稳定性定理 macro-economic system 宏观经济系统 magnetic dumping 磁卸载 magnetoelastic weig 你好ng cell 磁致弹性称重传感器 magnitude- frequencycharacteristic 幅频特征magnitude margin 幅值裕度 magnitudecale factor 幅值缩尺 man-mac 你好ne coordination 人机协调 manualstation 手动操作器 map(manufacturing automation protocol) 创造不用人力化以及谈 marginal effectiveness 边岸效益mason's gain formula 梅森增益公式 matc 你好 ng criterion 匹配准则 maximum likelihood estimation 最大似然估计 maximum ove rshoot 最大超调量maximum principle 极大值原理 mean-square error criterion 均方误差准则mechanismmodel 机理模子 meta-knowledge 元常识 metallurgical automation 冶金不用人力化 minimal realization 最小使成为事实 minimum phase system 最小相位系统 minimum variance estimation 最小方差估计 minor loop 副回路missile-target relative movement simulator 弹体- 目标相对于运动仿真器 modal aggregation 模态结集 modal transformation 模态变换 mb(model base)模子库model confidence 模子置信度 model fidelity 模子传神度 model reference adaptive control system 模子参考适应控制系统 model verification 模子证验mec(mostconomic control)最经济控制 motion space 可动空间 mtbf(mean time between failures) 均等妨碍距离时间 mttf(mean timeto failures)均等无妨碍时间 multi-attributive utility function 嗍粜孕в 煤??multicriteria 多重判据 multilevel 你好 erarc 你好 cal structure 多级递阶布局 multiloop control 多回路控制 multi- objective decision 多目标决定计划 multistate logic 多态逻辑multistratum 你好 erarc 你好 calcontrol 多段递阶控制 multivariable control system 多变量控制系统 myoelectric control 肌电控制 nash optimality 纳什最优性 naturallanguage generation 自然语言天生 nearest- neighbor 这段邻necessitymeasure 肯定是性侧度 negative feedback 负反馈 neural assembly 神经集合 neural network computer 神经采集计较机 nichols chart 尼科尔斯图noetic science 思维科学 noncoherent system 非枯燥关接洽统 noncooperative game 非互助博弈 nonequilibrium state 非平衡态 nonlinear element 非线性环节nonmonotonic logic 非枯燥逻辑 nonparametric training 非参量训练nonreversible electric drive 不成逆电气传动 nonsingular perturbation 非奇妙摄动 non-stationaryrandom process 非平稳 rand 历程 nuclear radiation levelmeter 核辐射物位计 nutation sensor 章动敏锐器 nyquist stability criterion 奈奎斯特稳定判据 objective function 目标函数 observability index 可测候指数observable canonical form 可测候标准型 on-line assistance 在线帮忙 on- off control 通断控制 open loop pole 开环极点 operational research model 运筹学模子 optic fiber tachometer 光纤式转速表 opt imal trajectory 最优轨迹optimization technique 最优化技术 orbital rendezvous 轨道交会 orbit gyrocompass 轨道捻捻转儿罗经 orbit perturbation 轨道摄动 order parameter 序参量 orientationcontrol 定向控制 oscillating period 振动周期 output predictionmethod 输出预估法 oval wheel flowmeter 椭圆齿轮流量计overalldesign 总体设计 overlapping decomposition 交叠分解 pade approximation 帕德类似 pareto optimality 帕雷托最优性 passive attitude stabilization 不主动姿态稳定 path repeatability 路径可重复性 pattern primitive 标准样式基元 pr(pattern recognition)标准样式辨认 p control 比例控制器 peak time 峰值时间penalty function method 罚函数法 periodic duty 周期事情制 perturbation theory 摄动意见 pessimisticvalue 悲观值 phase locus 相轨迹 phase trajectory 相轨迹hase lead 相位超前 photoelectric tachometric transducer 光电式转速传感器phrase-structure grammar 短句布局文法 physical symbol system 物理符号系统 piezoelectric force transducer 压电式力传感器 playbackrobot 示教再现式机器人 plc(programmable logic controller)可编步伐逻辑控制器 plug braking 反接制动 plug valve 旋塞阀 pneumaticactuator 气动执行机构 point-to-point control 点位控制 polar robot 极坐标型机器人 pole assignment 极点配置 pole-zero cancellation 零极点相消 polynom ial input 多项式输入 portfolio theory 投资配搭意见 pose overshoot 位姿过调量 position measuring instrument 位置丈量仪posentiometric displacement transducer 电位器式位移传感器 positive feedback 正反馈 power system automation 电力系统不用人力化 predicate logic 谓词逻辑pressure gauge with electric contact 电接点压力表 pressure transmitter 压力变送器 price coordination 价格协调 primal coordination 主协调 primary frequency zone 主频区 pca(principal component analysis)主成份分析法principlef turnpike 通途原理 process- oriented simulation 面向历程的仿真production budget 生产预算 production rule 孕育发生式法则 profitforecast 利润预测 pert(program evaluation and review technique) 计划评审技术program set station 步伐设定操作器 proportionalcontrol 比例控制 proportional plus derivative controller 比例微分控制器 protocol engineering 以及谈工程pseudo random sequence 伪 rand 序列 pseudo-rate-increment control 伪速度增量控制 pulse duration 电子脉冲持续时间 pulse frequency modulation control system 电子脉冲调频控制系统 pulse width modulation controlsystem 电子脉冲调宽控制系统 pwm inverter 脉宽调制逆变器 pushdown automaton 下推不用人力机 qc(quality control)质量管理 quadratic performance index 二次型性能指标 quali tative physical model 定性物理模子quantized noise 量化噪声 quasilinear characteristics 准线性特征 queuing theory 列队论 radio frequency sensor 射频敏锐器 ramp function 斜坡函数 random disturbance rand 扰动 random process rand 历程 rateintegrating gyro 速度积分捻捻转儿 ratio station 比率操作器 reactionwheel control 反效用轮控制realizability 可以使成为事实性,能使成为事实性 eal time telemetry 实时遥测receptive field 感受野 rectangularrobot 直角坐标型机器人 recursive estimation 递推估计 reducedorder observer 降阶测候器 redundant information 冗余信息 reentrycontrol 再入控制 regenerative braking 回馈制动,再生制动 regionalplanning model 地区范围规划模子 regulating device 调节装载 relationalalgebra 关系代数 relay characteristic 继电器特征 remote manipulator 遥控操作器 remote set point adjuster 远程设定点调整器 rendezvo 目前世界上最强大的国家 nd docking 交会以及对于接 resistance thermometer sensor 热电阻 esolution principle 归结原理 resource allocation 资源分配responsecurve 相应曲线 return difference matrix 回差矩阵 return ratiomatrix 回比矩阵 reversible electric drive 可逆电气传动 revoluterobot 关节型机器人revolution speed transducer 转速传感器 rewritingrule 重写法则 rigid spacecraft dynamics 刚性航天动力学 riskdecision 危害分析 robotics 机器人学 robot programming language 机器人编程语言 robust control 鲁棒控制 roll gap measuring instrument 辊缝丈量仪 root locus 根轨迹 roots flowmeter 腰轮流量计otameter 浮子流量计,转子流量计 rotary eccentric plug valve 偏疼旋转阀 rotary motionvalve 角行程阀 rotating transformer 旋转变压器 routh approximation method 劳思类似判据 routing problem 肪段侍?sampled-data control system 采样控制系统 sampling controlsystem 采样控制系统 saturation characteristics 饱以及特征 scalarlyapunov function 标量李雅普诺夫函数 scara(selective complianceassembly robot arm) 最简单的面关节型机器人 scenario analysis method 情景分析法 scene analysis 物景分析 self- operated controller 自力式控制器 self-organizing system 自组织系统 self-reproducing system 自繁殖系统self-tuning control 自校正控制 semantic network 语义采集 semi-physical simulation 半实物仿真 sensing element 敏锐元件 sensitivity analysis 活络度分析sensory control 觉得控制 sequentialdecomposition 挨次分解 sequential least squares estimation 序贯最小二乘估计 servo control 伺服控制,随动控制servomotor 伺服马达 settling time 过渡时间 short term planning 短期计划shorttime horizon coordination 短时程协调 signal detection and estimation 旌旗灯号检测以及估计 signal reconstruction 旌旗灯号重构 simulated interrupt 仿真中断 simulation block diagram 仿真框图 simulation experiment 仿真实验simulation velocity 仿真速度 single axle table 单轴转台 single degree of freedom gyro 单自由度捻捻转儿 single levelprocess 单级历程 single value nonlinearity 单值非线性 singularattractor 奇妙吸引子 singular perturbation 奇妙摄动 slave dsystem 受役系统 slower-than-real-time simulation 欠实时仿真slow subsystem 慢变子系统 socio-cybernetics 社会形态控制论 socioeconomic system 社会形态经济系统软体 psychology 软件生理学 solar array pointing control 日头帆板指向控制 solenoid valve 电磁阀 speed control system 魉傧低spin axis 自旋轴 stability criterion 稳定性判据 stabilitylimit 稳定极限 stabilization 镇定,稳定 stackelberg decision theory 施塔克尔贝格决定计划意见 state equation model 状况方程模子 state space description 状况空间描写 static characteristics curve 静态特征曲线 station accuracy 定点精密度stationary random process 平稳 rand 历程 statistical analysis 统计分析 statistic pattern recognition 统计标准样式辨认 steady state deviation 稳态误差steadystate error coefficient 稳态误差系数 step-by-step control 步进控制step function 阶跃函数 stepwise refinement 慢慢精化 stochasticfinite automaton rand 有限不用人力机 strain gauge load cell 应变式称重传感器 strategic function 计谋函数 strongly coupled system 狂詈舷低?subjective probability 主观频率 supervised training 喽窖??supervisory computer control system 计较机监控系统 sustainedoscillation 矜持振动 swirlmeter 旋进流量计 switc 你好 ng point 切换点 symbolic processing 符号处理 synaptic plasticity 突触可塑性syntactic analysis 句法分析 system assessment 系统评价 systemhomomorp 你好sm 系统同态 system isomorp 你好 sm 系统同构 system engineering 系统工程target flow transmitter 靶式流量变送器 task cycle 功课周期 teac 你好 ng programming 示教编程 telemetering system ofrequency division type 频分遥测系统 teleological system 目的系统 temperature transducer 温度传感器template base 模版库 theoremproving 定理证实 therapy model 治疗模子 t 你好ckness meter 厚度计 three-axis attitude stabilization 三轴姿态稳定 three state controller 三位控制器 thrust vector control system 推力矢量控制系统 time constant 时间常数 time-invariant system 定常系统,非时变系统 time schedule controller 时序控制器 time-sharing control 分时控制 time-varying parameter 时变参量 top-down testing 自上而下测试topological structure 拓扑布局 tqc(total quality control)全面质量管理 tracking error 跟踪误差 trade-off analysis 权衡分析 transfer function matrix 传递函数矩阵transformation grammar 转换文法 transient deviation 瞬态误差 transient process 过渡历程 transition diagram 转移图 transmissible pressure gauge 电远传压力表 trend analysis 趋向分析 triple modulation telemetering system 三重调制遥测系统 turbine flowmeter 涡轮流量计 turing mac 你好 ne 剂榛?two-time scale system 双时标系统 ultrasonic levelmeter??镂患?unadjustable speed electric drive 非调速电气传动 unbiasedestimation 无偏估计 uniformly asymptotic stability 一致渐近稳定性 uninterrupted duty 不间断事情制,长期事情制 unit circle 单位圆 unit testing 单位测试 unsupervised learing 非监视进修upperlevel problem 较高等级问题 urban planning 城市规划 utility function 效用函数 value engineering 价值工程 variable gain 可变增益,可变放大系数 variable structure control system 变布局控制 vectorlyapunov function 向量李雅普诺夫函数 velocity error coefficient 速度误差系数 velocity transducer 速度传感器vertical decomposition 纵向分解 vibrating wire force transducer 振弦式力传感器 viscousdamping 粘性阻尼 voltage source inverter 电压源型逆变器vortexprecession flowmeter 旋进流量计 vortex shedding flowmeter 涡街流量计 wb(way base) 要领库 weig 你好 ng cell 称重传感器 weightingfactor 权因数weighting method 加权法 w 你好 ttaker-shannon samplingtheorem 惠特克-喷鼻农采样定理 wiener filtering 维纳滤波 work stationfor computer aided design 计较机匡助设计事情站 w-plane w 最简单的面 zero-based budget 零基预算 zero-input response 零输入相应 zero-stateresponse 零状况相应 zero sum game model 零以及对于策模子2022 年 07 月 31 日历史上的今天:ipad2 怎么贴膜好吧,我还是入了 iPad2 2022-06-26 斗破苍穹快眼看书 2斗破苍穹 22 下载 20 11-06-26特殊声明:1:资料来源于互联网,版权归属原作者2:资料内容属于网络意见,与本账号立场无关3 :如有侵权,请告知,即将删除。
变系数谐波平衡法 英文简写

变系数谐波平衡法英文简写The phase shifting method for harmonic balance assumes that the phase-shifted harmonics retain the same amplitude as the original harmonics. However, in some cases, the amplitude of the harmonics may be a function of the frequency. To account for this, the variable coefficient harmonic balance method is used. In this method, the amplitude of each harmonic is assumed to be a function of the frequency, and the phase relationships between the harmonics are determined by using the equations that describe the system. The variable coefficient harmonic balance method is particularly useful for systems that have nonlinearities in the amplitude-frequency response, such as those containing resonant circuits or devices with saturation. This method allows the accurate prediction of the steady-state response of the system, including the amplitude and phase of each harmonic. Additionally, the variable coefficient harmonic balance method can be used to investigate the stability of the system by determining the eigenvalues of the linearized system near the operating point. Overall, the variable coefficient harmonic balance method is a powerful computational technique that enablesthe analysis and design of nonlinear systems in the frequency domain.变系数谐波平衡法是一种用于解决谐波平衡问题的方法,通过考虑谐波的幅度与频率之间的关系,解决了谐波相位平衡方法中幅度不固定的问题。
EPR粒子对与量子隐形传态

EPR粒子对与量子隐形传态张跃【摘要】Teleporting a quantum state, the sender Alice disassembles the entire informations into two parts: one purely classical information and the another purely non-classical information, then sends them to the receiver Bob via two different channels . Firstly, sending the purely non-classical part, the EPR pair which consists of two fermions with the spin of 1/2 here plays the key role in the teleportation, one EPR particle is given to Alice, while the other is given to Bob .Alice performs a complete measurement of the von Neumann type on the joint system consisting of the original particle and her EPR particle, this measurement performed in the four eigenstates of the Bell operator leads to "collapse" the wave packet of the joint wavefunction into the four correlated Bell bases. Through applying the appropriate unitary transformation to the state of his EPR particle Bob can reconstruct a replica of the original state "destroyed" in Alice's hand . Moreover, this Bell measurement produces two bits of classical information which is sent to Bob, a quantum teleportation is therefore completed. The paper studies the interior relation between EPR pairs of particles and the quantum teleportation.%量子隐形传态,由发送者Alice将准备传送的信息分离成一部分纯粹经典的信息和另外一部分纯粹非经典的信息,通过2条不同的信道传送给接收者Bob.首先传送非经典部分,这需要借助于EPR粒子对,考虑由2个自旋皆为2—1的费密子构成,其中一个分配给Alice,另一个分配给Bob.Alice选择对她一方的原始粒子和她的EPR粒子一并进行冯·罗曼类型的测量,这个在贝尔算符的4个本征态中的测量,导致系统的波函数的波包坍缩为相互关联的4个贝尔基矢.Bob通过对他的EPR粒子的状态进行适当的幺正变换,能够重新构造出在Alice一方被“毁灭”了的原始粒子的状态.此外,这个贝尔测量产生2个比特的经典信息,传送给Bob,从而完成一个量子隐形传态.文章中研究了EPR粒子对与量子隐形传态的内在联系.【期刊名称】《沈阳师范大学学报(自然科学版)》【年(卷),期】2012(030)004【总页数】4页(P489-492)【关键词】量子隐形传态;量子不可克隆定理;量子纠缠;EPR关联【作者】张跃【作者单位】湖南师范大学物理系,长沙410081【正文语种】中文【中图分类】O4130 引言量子隐形传态(Quantum Teleportation),是依靠传送量子状态来传送量子信息,但是并不能够简单地将一个量子状态由发送者直接传送给接收者,而必须借助于EPR粒子对添加(EPR pair)。
实现纠缠交换的基本方案

在 自旋多体系统 中的应用 ( 2 0 1 3 J K 0 6 3 4 ) ; 陕西省军民融合研究 基金重点项 目: 基于军民融 合的光合作用系统 能量传输 机制 研究 ( 1 2 J M R 0 2 ) ; 渭南师范学院科研计划项 目: 开放量 子系统 中量 子信息传输 研究 ( 1 3 Y K S O 1 0 ) ; 渭南师范学 院科研计划 项
实 现 纠缠 交 换 的 基 本 方 案
王 菊 霞
( 渭南师范学院 a . 物理与电气工程学院 . b . 陕西省 x射线检测与应用研究 开发中心 , 陕西 渭南 7 1 4 0 9 9 )
摘 要: 阐述 了量子 隐形传态及量子纠缠交换 的基本 理论 , 通过 单光 子的量 子纠缠交 换 、 连续 变量纠缠 交换实 证说 明
传送一个物体就是传送组成它的全部经典物理特征那么只要将原物的所有信息能提取出来传送这些信息的速度只要不超越光速极限即使传至遥远的地点然后利用获得的信息重新构制出与被传送对象完全相同的复制品这种重新组装的物体就可完成经典客体的隐形传15162纠缠交换的基本理论设发送者alice简称a和接收者bob简称b他们分别掌握纠缠光束对ab和cd即初始时刻a之间互不纠缠如果通过第三方claire简称进行联合bell基测量17由于测量导致的纠缠塌缩将使得之前没有任何关联的光学摸a之间的epr纠缠将量子态b离物传送至d在模d上再现模b的量子态特性从而使模d产生纠缠即可完成纠缠的转移这一过程称之为纠缠交换entanglementswapping
CFD松弛因子的解释之欧阳数创编
1、FLUENT 中关于松弛因子的解释由于流体力学中要求解非线性的方程,在求解过程中,控制变量的变化是很必要的,这就通过松弛因子来实现的。
它控制变量在每次迭代中的变化。
也就是说,变量的新值为原值加上变化量乘以松弛因子。
如:A1=A0+B*DETAA1 新值A0 原值B 松弛因子DETA 变化量松弛因子可控制收敛的速度和改善收敛的状况为1,相当于不用松弛因子大于1,为超松弛因子,加快收敛速度小于1,欠松弛因子,改善收敛的条件一般来讲,大家都是在收敛不好的时候,采用一个较小的欠松弛因子。
Fluent里面用的是欠松弛,主要防止两次迭代值相差太大引起发散。
松弛因子的值在0~1之间,越小表示两次迭代值之间变化越小,也就越稳定,但收敛也就越慢。
这个1e-3或者1e-4的收敛标准是相对而言的。
在FLUENT中残差是以开始5步的平均值为基准进行比较的。
如果初值取得好,迭代会很快收敛,但是残差却依然很高;但是当你改变初场到与基准相差很大的值时,残差开始会很大,但随后却可以很快降低到很低的水平。
其实两种情况下流场是基本相同的。
2、FLUENT 收敛判断由此来看,判断是否收敛并不是严格根据残差的走向而定的。
可以选定流场中具有特征意义的点,监测其速度,压力,温度等的变化情况。
如果变化很小,符合你的要求,即可认为是收敛了。
一般来说,压力的收敛相对比较慢一些的。
是否收敛不能简单看残差图,还有许多其他的重要标准,比如进出口流量差、压力系数波动等等。
尽管残差仍然维持在较高数值,但凭其他监测也可判断是否收敛。
最重要的就是是否符合物理事实或试验结论。
残差曲线是否满足只是一个表面的现象,还要看进口和出口总量差不得大于1%,而且即使这样子,收敛解也不一定准确,它和网格划分/离散化误差,以及物理模型的准确性都有关系。
所以需要试验数据来验证。
残差的大小不能决定是否收敛,用FLUENT计算时,一般多采用监测一个面的速度(或者是压力、紊动能等参数)基本上不随着计算时间的推移而变化,就认为基本达到收敛据质量守恒,收敛时进、出口的流量数值应大致相等(一般认为进出口质量差值比上入口质量的相对值小于0.5%时收敛,但是对特殊情况可能不同),但符号相反,一般出口流量是负值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a r X i v :q u a n t -p h /9906066v 1 18 J u n 1999Entanglement Swapping using Continuous VariablesR.E.S.Polkinghorne and T.C.RalphDepartment of Physics,Faculty of Science,The Australian National University,ACT 0200AustraliaE-mail:Timothy.Ralph@.au(submitted to PRL 22nd October 1998)Abstract We investigate the efficacy with which entanglement can be teleported using a continuous measurement scheme.We show that by using the correct gain for the classical channel the degree of violation of locality that can be demonstrated (using a CH type inequality)is not a function of the level of entanglement squeezing used in the teleportation.This is possible because a gain condition can always be choosen such that passage through the teleporter is equivalent to pure attenuation of the input field.It is remarkable that non-local entanglement can be established between particles that have never interacted directly.Here “non-local”refers to the inability of local hidden variable theories to predict the observed correlations.This “entanglement swapping”[1],[2]may be useful in establishing non-local correlations over very large distances and other applications [3].Recently Pan et al [4]have demonstrated entanglement swapping of the polarization entanglement created by type II parametric down conversion experimentally.In all discus-sions and experiments to date discrete measurements and manipulations are made in order to transfer the non-local correlations.For example in the optical experiments,photon co-incidences operate photo-current gates.However entanglement swapping is really a special case of teleportation [2]and in work by Vaidman [5]and Braunstein and Kimble [6],schemes for the teleportation of continuous quantum variables have been proposed.In these schemes continuous measurements and manipulations are used.A preliminary experimental demon-stration of continuous variable teleportation of a coherent state has recently been presented by Furusawa et al [7].An important question to ask is;can non-local entanglement be swapped or teleported using a continuous measurement scheme?In this paper we show explicitly that this can be achieved.This effect represents a com-pletely new way of transferring non-local information.Of particular practical significance is that the conditions for achieving non-local effects are not stringent.The optical arrangement we will investigate is shown in Fig.1.It combines the basic arrangement of entanglement swapping [4]with a 2-mode generalization of the continuousvariable teleportation scheme[6].We consider a non-collinear type II optical parametric oscillator operating at low pump efficiency(OPO1)as our source of entangled photons[8]. In the Heisenberg picture the two outputs,A and B,can be decomposed into their horizontal (h)and vertical(v)linear polarization components byA=A(h)ˆh+A(v)ˆvB=B(h)ˆh+B(v)ˆv(1) whereˆh andˆv are orthogonal unit vectors,A(h,v)=A0(h,v)coshχ1+B†0(v,h)sinhχ1,B(h,v)=B0(h,v)coshχ1+A†0(v,h)sinhχ1,(2) A0and B0are the vacuum inputs to OPO1,andχ1is its conversion efficiency.We have assumed the bandwidth of the OPO is broad compared to our detection bandwidth and that pump depletion can be ignored.The output state of the combined system in the number state basis is given by12cosh(χ1)∞n=0(tanhχ1)n(|n h,n v +|n v,n h )(3)where|n i,n j ≡|n i A⊗|n j B(4) and n h and n v are the photon number in the horizontal and vertical polarizations respectively.This reduces to the number-polarization entangled stateχ12(|1h,1v +|1v,1h )+|0 (5)for low pump efficiency(i.eχ1≪1).The state given by Eq5violates the Clauser-Horne (CH)type inequality[9]S=R(θA,θB)−R(θA,θ′B)+R(θ′A,θB)+R(θ′A,θ′B)split into its two polarizations components (B h and B v )at a polarizing beam-splitter (see Fig.1).Similarly beam C is split into C h and C v .The horizontally polarized component of OPO1(B h )is mixed with the horizontally polarized component from OPO2,C h ,on a 50:50beamsplitter.The outputs of the beamsplitter are directed to two homodyne detec-tion systems which measure the phase (X −)and amplitude (X +)quadratures of the field.Similarly B v and C v are mixed and their quadrature amplitudes detected.The resulting photocurrents are proportional toX ±(h,v )= η/2(X ±B (h,v )±X ±C 0(h,v )cosh χ2+X ±D 0(v,h )sinh χ2)(7)where,for example X −B =i (B −B †)and X +B =B +B †.The operators X ±δ(h,v )come fromvacuum modes introduced by losses in the homodyne systems,which are assumed to have efficiencies η.The photo-currents are then amplified and fed-forward to the interferomet-ric modulation systems (IMS)depicted in Fig.2which act on the individual polarization components of the second beam from OPO2,D h and D v .The photocurrents from the detec-tion of the horizontally polarized beams are used to modulate D v whilst the photo-currents from the detection of the vertically polarized beams are used to modulate D h .The effect of the IMS’s are to displace the amplitudes of the beams by coupling in power from local oscillator beams (LO).The coupling is achieved via electro-optic modulators (EOM)in the interferometer arms.Provided the phase shifts (φv,h )introduced by the EOM’s are small,the output of the IMS’s (D ′h and D ′v )are given byD ′(h,v )=D (h,v )+¯E φv,h (8)where ¯Eis the coherent amplitude of the LO.In general we have φv,h (t )=t0k +(u )X +v,h (t −u )du +t 0k −(u )X −v,h (t −u )du (9)where k ±contains various constants of proportionality as well as the time response of the feedforward electronics.However,if we restrict our attention to RF frequencies (relative to the local oscillator)for which the frequency response of the electronics is flat we can setk ±(u )=12¯E λ±δ(u )(10)where λ±is the feedforward gain,and soD ′(h,v )=D (h,v )+12λ+X +v,h +12λ−X −v,h (11)Finally the beams are recombined using a polarizing beamsplitter and a half-wave plate is used to rotate horizontal polarizations into vertical and vice versa.The output beam isD ′=D ′(v )ˆh +D ′(h )ˆv (12)Setting (λ=−λ+=iλ−)and assuming unit detection efficiency (η=1)we obtainD′= B(h)+(sinhχ2−λcoshχ2)C†0h+(coshχ2−λsinhχ2)D0v ˆh+ B(v)+(sinhχ2−λcoshχ2)C†0v+(coshχ2−λsinhχ2)D0h ˆv(13) In the limit of strong squeezing(χ2≫1such that coshχ2≈sinhχ2)and unity gain(λ=1) beams B and D′become equivalent.It is clear that in this limit the beams A and D′will violate the CH inequality for conditions under which A and B violated it,showing that the non-locality has been teleported.This is shown in Fig.3where Eq6is evaluated as a function of polarizer angle with beams A and D′as inputs,unity gain and99%squeezing.Very high levels of squeezing are difficult to achieve so it is important to ascertain what levels of squeezing are required to achieve non-local teleportation.Indeed,if we remain at unity gain,the operating point discussed in Ref.[6]and used by Furusawa et al[7],Fig.3 also shows that non-locality is lost for squeezing less than about80%.Surprisingly,though, we are able to recover non-local behavior for low levels of squeezing if we reduce the gain in the feedforward loops.This represents a new and potentially useful operating point.We can write an analytical relationship between the value of S that could be obtained from photon correlation measurements of beams A and B,S A,B and that which could be obtained for the same measurements of beams A and D′,S A,D′in the limit thatχ1≪1. We must calculate photon coincidence count rates between beams A and D′such asR(θA,θD′)= in|E†D′(θD′)E†A(θA)E A(θA)E D′(θD′)|in (14) whereE A(θA)=A h cosθA+A v sinθAE D′(θD′)=D′h cosθD′+D′v sinθD′(15) and|in is given by Eq.5.After some algebra onefindsR(θA,θD′)=λ2ηR(θA,θB)+(N2+λ2(1−η))/2(16) whereN=sinhχ2−λ√λ2+ηS A,B+1−ηλ2+2−η(20)Considerfirst unit detection efficiency(η=1).Eq.20shows that the non-local correlation is preserved by the teleportation for any level of squeezing provided we setλop=tanhχ2(21) This effect is shown in Fig.4where the maximum of S A,D′is plotted against the feedforward gain,λfor various levels of squeezing.As squeezing is reduced equal violations of locality are still achieved for lower levels of gain.The range of feedforward gains for which non-local teleportation is achieved actually broadens to a maximum value as the squeezing is reduced before narrowing again.The mechanism for this surprizing result can be understood by examining the action of the teleporter on an arbitrary,single mode inputfield,a in.Under ideal conditions the outputfield is given bya out=λa in+(coshχ−λsinhχ)B0−(λcoshχ−sinhχ)A†0(22) Notice that photons are added to the output through the action of the creation operator, A†0.These spurious photons are detrimental to the observation of non-local correlations. However no photons are added to the output if the gain conditionλop=tanhχis choosen as the coefficient of A†0goes to zero.The output is then given bya out=λop a in+η)this means the homodyne detection efficiencies must be better than about83%.This limit is independent of the amount of squeezing.However,reducing the squeezing of OPO2increases the effective attenuation at the optimum gain condition and hence reduces the coincidence count rate.As a result longer counting times are required to observe non-locality.This reduction in signal to noise is typical of entanglement swapping and is an unavoidable consequence of operating below unity gain[11].Never-the-less we believe an experimental demonstration is feasible with current technology.For example withη=0.9and50%squeezing(χ2=0.34)wefind S A,D′=1.08with coincidence count rates reduced to about10%of their unteleported values.In summary we have shown that it is possible to teleport the non-local correlations as-sociated with number-polarization entanglement using a continuous variable scheme.Thenon-local correlations can be teleported for any level of squeezing in the teleporting OPO (OPO2).In general the best operating point for teleportation of the entanglement is where the output of the teleporter is simply an attenuated version of the input beam.This oper-ating point is clearly of importance for a large range of superposition and entangled state inputs.We thank S.L.Braunstein for stimulating discussions.This work was supported by the Australian Research Council.FIGURESFIG.1.Schematic of the teleportation arrangement.OPO1produces pairs of photons with entangled polarizations in beams A and B.The polarization modes of beam B are separated,and teleported separately into beam D.The squeezed resource is provided by OPO2.The polarization modes are swapped during teleportation,so a half wave plate is inserted to swap them back.Finally, coincidence measurements are taken on modes A and D’to test for violation of the Clauser-Horne inequality.FIG.2.Schematic of the interferometric modulation system(IMS).The input beam is combined at a beamsplitter with a coherently related local oscillator.The signal from the homodyne detectors is used to modulate the phases of each of the resulting beams,with aπphase shift between them. The beams are then recombined.In the absence of modulation the input emerges unchanged from the output port.The phase modulation couples some of the intensity of the local oscillator into the output beam;in effect the signal is added to the amplitude of the beam.FIG.3.The variation of S A,D′with the polarizer angle(θA)at unity gain.The other polarizers are also varied such that the conditionθA=−θD′/2=θ′A/3is maintained whilstθ′D′=0.This arrangement maximizes S.The CH inequality is violated for S>1.The two traces are for99% and80%squeezing at OPO2.χ1=0.1FIG.4.The variation of S A,D′with the gainλ,for squeezing of10%,50%,80%and99%.Each graph has its maximum whenλ=tanhχ2,in which case S has the same value before and after one of the beams is teleported.χ1=0.1REFERENCES[1]M.Zukowski,A.Zeilinger,M.A.Horne and A.K.Ekert,Phys.Rev.Lett.71,4287(1993).[2]C.H.Bennett,G.Brassard,C.Crepeau,R.Jozsa,A.Peres and W.K.Wootters,Phys.Rev.Lett.70,1895(1993).[3]S.Bose,V.Vedral and P.L.Knight,Phys.Rev.A57,822(1998).[4]Jian-Wei Pan,Dik Bouwmeester,Harald Weinfurter and Anton Zeilinger,Phys.Rev.Lett.80,3891(1998).[5]L.Vaidman,Phys.Rev.A49,1473(1994).[6]S.L.Braunstein and H.J.Kimble,Phys.Rev.Lett.80,869(1998).[7]A.Furusawa,J.L.Sorensen,S.L.Braunstein, C. A.Fuchs,H.J.Kimble andE.S.Polzik,Science,282,706(1998).[8]P.G.Kwiat,K.Mattle,H.Weinfurter,A.Zeilinger,A.V.Sergienko and Y.Shih,Phys.Rev.Lett.75,4337(1995).[9]J.F.Clauser and M.A.Horne,Phys.Rev.D10,526(1974).[10]S.L.Braunstein and H.J.Kimble,Nature394,840(1998).[11]T.C.Ralph and m,Phys.Rev.Lett.81,5668(1998).00.511.500.51 1.5S p a r a m e t e r a t 22.5˚Feedforward gainPolkinghorne et al. Figure 4 10% 50% 80% 99%。