posix消息队列3
Posix消息队列和SystemV消息队列

Posix消息队列和SystemV消息队列今天弄了一天SystemV消息队列,遇到了问题终于解决了。
在此总结一下。
msgsnd(intmsqid,constvoid*ptr,size_tlength,intflag)中10ng类型的消息类型不能为0,否则发送会失败。
msgrcv(intmsqid,void*ptr,size_tlength,longtype,intflag)中ptr必须是一个结构体的地址,并且该结构体第一个成员要是long类型。
否则会接收失败。
消息队列消息队列可以认为是一个消息链表。
有足够写权限的线程就可往队列中放置消息,有足够读权限的线程就可以从队列中取走消息。
每个消息是一个记录,他有发送者赋予一个优先级。
在某个进程往一个队列写入消息之前,并不需要另外某个进程在该队列上等待消息的到达。
Posix消息队列和SystemV系统的消息队列区别:1、对Posix消息队列的读总是返回最高优先级的最早消息,对SystemV消息队列得读则可以返回任意指定优先级的消息2、当往一个队列放置一个消息时,Posix消息队列允许产生一个信号或启动一个线程,SystemV消息队列则不提供类似的机制消息的属性:1、一个无符号整数优先级(Posix)或是长整类型(SystemV)2、消息的数据部分长度3、数据本身(SystemV系统发送消息时需要定义消息的结构,而Posix系统不需要定义这样的结构)Posxi消息队列mq_open创建一个新消息队列或是打开一个已经存在的消息队列,返回值成为消息队列描述字。
mq_close关闭已打开的消息队列。
mq_unlink从系统删除消息队列。
每个消息队列有四个属性,有mq_getattr获得这些属性,mq_setattr设置其中某个属性mq_send用于往一个队列中放置一个消息mq_receive:用于往一个队列中取走一个消息,该函数总是返回所指定队列中最高优先级的最早的消息,而且该优先级能随该消息的内容及长度一同返回。
posix消息队列使用全面介绍
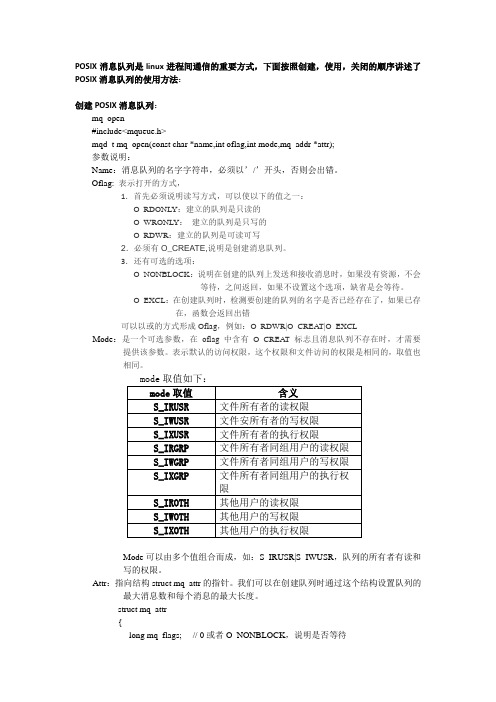
POSIX消息队列是linux进程间通信的重要方式,下面按照创建,使用,关闭的顺序讲述了POSIX消息队列的使用方法:创建POSIX消息队列:mq_open#include<mqueue.h>mqd_t mq_open(const char *name,int oflag,int mode,mq_addr *attr);参数说明:Name:消息队列的名字字符串,必须以’/’开头,否则会出错。
Oflag: 表示打开的方式,1.首先必须说明读写方式,可以使以下的值之一:O_RDONLY:建立的队列是只读的O_WRONLY:建立的队列是只写的O_RDWR:建立的队列是可读可写2.必须有O_CREATE,说明是创建消息队列。
3.还有可选的选项:O_NONBLOCK:说明在创建的队列上发送和接收消息时,如果没有资源,不会等待,之间返回,如果不设置这个选项,缺省是会等待。
O_EXCL:在创建队列时,检测要创建的队列的名字是否已经存在了,如果已存在,函数会返回出错可以以或的方式形成Oflag,例如:O_RDWR|O_CREAT|O_EXCL Mode:是一个可选参数,在oflag中含有O_CREA T标志且消息队列不存在时,才需要提供该参数。
表示默认的访问权限,这个权限和文件访问的权限是相同的,取值也相同。
Mode可以由多个值组合而成,如:S_IRUSR|S_IWUSR,队列的所有者有读和写的权限。
Attr:指向结构struct mq_attr的指针。
我们可以在创建队列时通过这个结构设置队列的最大消息数和每个消息的最大长度。
struct mq_attr{long mq_flags; // 0或者O_NONBLOCK,说明是否等待long mq_maxmsg; //队列中包含的消息数的最大限制数long mq_msgsize; //每个消息大小的最大限制数long mq_curmsgs; //当前队列中的消息数}mq_maxmsg和mq_msgsize属性只能在创建消息队列时通过mq_open来设置。
mq_notify用法
mq_notify 是POSIX 消息队列库中的一个函数,它用于实现异步事件通知。
这个函数告诉POSIX 消息队列系统在某个空队列中放置了一个消息时产生一个信号或者创建一个线程来执行特定程序。
以下是mq_notify 的基本用法:
```c
#include <mqueue.h>
int mq_notify(mqd_t mqdes, const struct sigevent *notification);
```
其中,mqdes 是消息队列的描述符,notification 是一个指向sigevent 结构的指针,用于指定当一个消息到达时需要执行的操作。
sigevent 结构至少包含以下字段:
* sigev_notify :指定通知类型,可以为SIGEV_NONE、SIGEV_SIGNAL 或SIGEV_THREAD。
* sigev_signo :当通知类型为SIGEV_SIGNAL 时,这个字段指定了发送的信号。
* sigev_value :当通知类型为SIGEV_SIGNAL 或SIGEV_THREAD 时,这个字段指定了传递给处理函数或线程的参数。
* sigev_notify_function :当通知类型为SIGEV_THREAD 时,这个字段指定了被调用的函数。
该函数应返回一个int 值。
* sigev_notify_attributes :当通知类型为SIGEV_THREAD 时,这个字段指定了被调用函数的线程属性。
以上信息仅供参考,建议阅读POSIX 消息队列官方文档以获取更全面和准确的信息。
posix接口实现方法

posix接口实现方法以POSIX接口实现方法为标题的文章POSIX(Portable Operating System Interface)是一种操作系统接口标准,旨在提供可移植性和互操作性。
POSIX接口定义了一组函数、命令和工具,用于应用程序与操作系统进行通信和交互。
本文将介绍一些常见的POSIX接口实现方法,并探讨它们在不同情况下的应用。
一、文件和目录操作接口1. 创建文件:使用open函数创建一个新文件,可以指定文件的权限和打开模式。
如果文件已存在,则会打开该文件;如果文件不存在,则会创建一个新文件。
2. 读取文件内容:使用read函数从文件中读取数据。
该函数要求提供文件描述符、缓冲区和读取的字节数,返回实际读取的字节数。
3. 写入文件内容:使用write函数将数据写入文件。
该函数要求提供文件描述符、缓冲区和写入的字节数,返回实际写入的字节数。
4. 关闭文件:使用close函数关闭文件,释放文件描述符。
5. 创建目录:使用mkdir函数创建一个新目录。
可以指定目录的权限和路径。
6. 删除目录:使用rmdir函数删除一个空目录。
7. 遍历目录:使用opendir函数打开一个目录,使用readdir函数读取目录中的文件和子目录。
二、进程管理接口1. 创建进程:使用fork函数创建一个新进程,该进程是调用进程的副本。
父进程与子进程共享代码段,但拥有独立的数据段和堆栈。
2. 等待进程结束:使用wait函数等待子进程结束,并获取子进程的返回状态。
3. 进程替换:使用exec函数族中的execve函数将当前进程替换为新的可执行文件。
该函数要求提供新程序的路径和参数。
4. 进程退出:使用exit函数终止当前进程,并返回一个退出状态。
5. 进程间通信:使用管道、共享内存、信号量等机制实现进程间的通信和同步。
三、线程管理接口1. 创建线程:使用pthread_create函数创建一个新线程。
该函数要求提供线程属性、线程入口函数和参数。
QNX中的进程间通信

QNX中的进程间通信(IPC)在QNX Neutrino中消息传递(Message passing)是IPC的主要形式,其他形式也都是基于消息传递来实现的。
QNX中提供了如下一个形式的IPC:Serive: Implemented in:・Message-passing Kernel・Signals Kernel・POSIX message queues External process・Shared memory Process manager・Pipes External process・FIFOs External process一、Synchronous message passing[同步消息传递]如果一个线程执行了MsgSend()方法向另一个线程(可以属于不同进程)发送消息,它会就被阻塞,直到目标线程执行了MsgReceive(),并处理消息,然后执行了MsgReply()。
如果一个线程在其他线程执行MsgSend()之前执行了MsgReceive(),它会被阻塞直到另一个线程执行了MsgSend()。
消息传递是通过直接的内存copy来实现的。
需要巨大消息传递的时候建议通过Shared Message[共享内存]或其他方式来实现。
1、消息传递中的状态迁移客户程序的状态迁移・SEND blocked:调用MsgSend()后,服务程序没有调用MsgReceive()的状态。
・REPLY blocked:调用MsgSend()后,并且服务程序调用了MsgReceive(),但是没有调用MsgReply()/MsgError()的状态。
当服务程序已经调用了MsgReceive()方法是,客户程序一旦调用MsgSend()就直接迁移如REPLY blocked状态。
・READY:调用MsgSend()后,并且服务程序调用了MsgReceive()和MsgReply()的状态。
服务程序的状态迁移:・RECEIVE blocked;调用MsgReceive()后,客户程序没有调用MsgSend()时的状态。
pompi管道参数

pompi管道参数摘要:1.POMPI 管道概述2.POMPI 管道参数分类3.POMPI 管道参数详解3.1 传输方式3.2 缓冲区大小3.3 数据块大小3.4 管道模式3.5 超时设置3.6 错误处理正文:【POMPI 管道概述】POMPI(Posix Message Queue IPC)是一种基于消息队列的进程间通信(IPC)机制。
它允许具有亲缘关系的进程通过消息队列发送和接收消息,以实现进程间的数据同步。
POMPI 管道是POMPI 的一种实现方式,通过POMPI 管道,进程可以方便地在具有亲缘关系的进程之间传输数据。
【POMPI 管道参数分类】在创建POMPI 管道时,需要设置一系列参数以满足不同场景下的需求。
这些参数主要分为以下几类:1.传输方式:用于设置消息传输的类型。
2.缓冲区大小:用于设置消息缓冲区的大小。
3.数据块大小:用于设置每次传输的数据块大小。
4.管道模式:用于设置管道的工作模式。
5.超时设置:用于设置管道的超时值。
6.错误处理:用于设置管道的错误处理方式。
【POMPI 管道参数详解】【3.1 传输方式】传输方式参数用于设置消息传输的类型,主要有以下几种:- QUEUE_PIPE:普通管道,用于传输普通消息。
- QUEUE_FIFO:先进先出管道,用于保证消息的传输顺序。
- QUEUE_RBuf:环形缓冲区管道,用于传输大量数据。
【3.2 缓冲区大小】缓冲区大小参数用于设置消息缓冲区的大小,单位为字节。
根据系统资源和应用需求,合理设置缓冲区大小可以提高管道的传输效率。
【3.3 数据块大小】数据块大小参数用于设置每次传输的数据块大小,单位为字节。
数据块大小应根据系统资源和应用需求进行设置,以提高传输效率。
【3.4 管道模式】管道模式参数用于设置管道的工作模式,主要有以下几种:- PIPEDream|PIPE_NONBLOCK:非阻塞模式,用于在管道满时防止进程阻塞。
- PIPEDream|PIPE_BLOCK:阻塞模式,用于在管道满时让进程阻塞。
Docker容器间通信的方式与选择

Docker容器间通信的方式与选择近年来,Docker作为一种轻量级的容器化技术,已经在软件开发和部署领域广泛应用。
作为一个开源项目,Docker提供了丰富的功能和灵活的配置选项,使得开发人员可以轻松地构建、部署和管理应用程序。
然而,随着容器数量和规模的增加,容器间的通信成为一个关键的问题。
本文将探讨Docker容器间通信的方式与选择。
1.概述容器间通信是指在一个Docker主机上运行的不同容器之间进行信息交流和数据传输。
常见的容器间通信方式有三种:网络通信、进程间通信和共享存储。
2.网络通信网络通信是最常见和重要的容器间通信方式。
Docker提供了多种网络驱动选项,包括host模式、bridge模式和overlay模式等。
在host模式中,所有容器共享Docker主机的网络命名空间,它们可以直接通过本地主机的网络接口进行通信。
这种方式简单高效,但缺乏隔离性,容器之间可能会产生端口冲突。
在bridge模式中,Docker主机作为虚拟网络网桥,容器通过虚拟网络接口连接到主机上的网桥,从而实现容器之间的通信。
这种方式提供了更好的隔离性,可以通过端口映射进行容器内外的通信,但存在性能损耗。
在overlay模式中,Docker利用软件定义网络(SDN)技术,构建一个跨主机的虚拟网络,容器在不同的主机上通过overlay网络进行通信。
这种方式适用于分布式应用程序的部署,但需要额外的配置和管理。
3.进程间通信进程间通信是指在同一个容器内的不同进程之间进行通信。
Docker提供了多种IPC(进程间通信)机制,包括PID(进程ID)命名空间、System V IPC和POSIX消息队列等。
PID命名空间使得每个容器内的进程有独立的进程ID空间,从而避免了进程冲突。
System V IPC提供了一种基于键值和共享内存的进程间通信方式,可用于实现容器内的进程间通信。
POSIX消息队列则提供了一种消息传递机制,容器内的进程可以通过消息队列进行异步的通信。
1简答题答案

1简答题答案简答题红⾊标记为不确定答案,请⼤家补充!1、在使⽤GDB调试程序时,如何设置断点:答:在由“(gdb)”开头的命令⾏界⾯输⼊“b”+对应⾏号例如: b 6回车2、在使⽤GDB调试程序时,如何运⾏程序:答:在由“(gdb)”开头的命令⾏界⾯输⼊:r回车3、在使⽤GDB调试程序时,如何实现从指定代码位置开始单步运⾏:答:先设置断点,再运⾏程序⾄该断点,再单步运⾏。
具体操作:在由“(gdb)”开头的命令⾏界⾯输⼊“b”+对应⾏号例如: b 6回车输⼊ r 回车输⼊ step 回车4、在使⽤GDB调试程序时,如何查看断点处的相关变量值:答:在由“(gdb)”开头的命令⾏界⾯输⼊“p”+ 变量值例如: p n回车5、什么是系统调⽤答:系统调⽤是指操作系统提供给⽤户程序调⽤的⼀组“特殊”接⼝,⽤户程序可以通过这组“特殊”接⼝来获得操作系统内核提供的服务。
例如⽤户可以通过进程控制相关的系统调⽤来创建进程、实现进程调度、进程管理等。
6、标准I/O和低级I/O(⽂件I/O)的区别答:标准I/O默认采⽤了缓冲机制,低级I/O⼀般没有采⽤缓冲,需要⾃⼰创建缓冲区。
⽂件I/O主要针对⽂件操作,读写硬盘等,标准I/O,主要是打印输出到屏幕等。
因为他们设备不⼀样,⽂件I/O针对的是⽂件,标准I/O是对控制台,操作的是字符流。
使⽤的打开、关闭、读、写函数也不同。
7、什么是进程答:进程是Linux系统的基本调度和管理资源的单位,它是通过进程控制块来描述的。
进程控制块包含了进程的描述信息、控制信息以及资源信息,它是进程的⼀个静态描述。
在Linux 中,进程控制块中的每⼀项都是⼀个task_struct结构。
进程是程序的执⾏过程,根据它的⽣命周期可以划分成3种状态。
执⾏态:该进程正在运⾏,即进程正在占⽤CPU。
就绪态:进程已经具备执⾏的⼀切条件,正在等待分配CPU的处理时间⽚。
等待态:进程不能使⽤CPU,若等待事件发⽣(等待的资源分配到)则可将其唤醒。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
消息队列 posix API消息队列(也叫做报文队列)能够克服早期unix通信机制的一些缺点。
信号这种通信方式更像\"即时\"的通信方式,它要求接受信号的进程在某个时间范围内对信号做出反应,因此该信号最多在接受信号进程的生命周期内才有意义,信号所传递的信息是接近于随进程持续的概念(process-persistent);管道及有名管道则是典型的随进程持续IPC,并且,只能传送无格式的字节流无疑会给应用程序开发带来不便,另外,它的缓冲区大小也受到限制消息队列就是一个消息的链表。
可以把消息看作一个记录,具有特定的格式以及特定的优先级。
对消息队列有写权限的进程可以向中按照一定的规则添加新消息;对消息队列有读权限的进程则可以从消息队列中读走消息。
消息队列是随内核持续的。
mq_open - 打开一个消息队列概要#include <fcntl.h> /* 定义 了O_* 常量 */#include <sys/stat.h> /* 定义了 mode 常量 */#include <mqueue.h>mqd_t mq_open(const char *name, int oflag);mqd_t mq_open(const char *name, int oflag, mode_t mode,struct mq_attr *attr);需要 -lrt 来链接。
描述mq_open() 创建一个新的 POSIX 消息队列或打开一个存在的队列。
这个队列使用 name 标识。
每个消息队列都通过形如 /somename 的名字来区分,这是一个包含起始斜杠在内的最大长度不超过 NAME_MAX(如 225)的以空字符结尾的字符串,在起始斜杠之后不允许再有斜杠。
参数 oflag 参数指定控制操作的标志。
(这个标志的值可以通过包含 <fcntl.h> 来获得。
)下面给出的标志至少需要指定一个:O_RDONLY 以只能收取消息的方式打开队列。
O_WRONLY 以只能发送消息的方式打开的队列。
O_RDWR 以可发送也可收取消息的方式打开队列。
零个或多个下面列出的标志可以用 位或 到 oflag 里:O_NON B LOC K 以非阻塞的方式打开队列。
具体情况是在 mq_recei v e(3) 和mq_send(3) 要阻塞的时候,这些函数使用错误EA G AIN 来替代。
O_CREA T 如果不存在则创建消息队列。
消息队列的所有者(用户 ID)被设置为调用进程的有效用名 ID。
组属性(组 ID)被设置为调用进程的有效组 ID。
O_EXCL 如果O_CREA T 在 oflag 里指定,当名为name 队列已经存在时,让函数以 EEXIS T 失败。
如果O_CREA T 在 oflag 里指定,那么两个额外的参数也必须给定。
mode 参数指定新队列的权限,这与open(2) 一样。
(描述权限的符号常量可以通过包含 <sys/stat.h> 来获得。
)权限设置会被进程掩码处理。
参数 attr 指定队列的属性。
参考mq_getattr(3) 来了解细节。
如果attr 是 N U LL,队列将使用实现定义的默认属性来创建。
返回值成功时,mq_open() 返回一个能被其它消息队列函数使用的消息队列描述符。
失败时,mq_open() 返回(mqd_t) -1,并设置errno 来指明错误。
错误 EACCES 队列存在,但是调用者没有权限以指定的方式打开。
EACCES name 包含多个斜杠。
EEXIS T 在 oflag 里同时指定了 O_CREA T和O_EXCL,但是名字 name 的队列已经存在。
EIN V AL O_CREA T 在 oflag 里存在,并且attr 不是 N U LL,但是 attr->mq_maxmsg 或 attr->mq_msqsi z e 是无效的。
这两个域都必须大于零。
对于一个非特权(没有 CAP_SYS_RESO U RCE 能力)进程 attr->mq_maxmsg必须小于或等于 msg_max 限制,并且 attr->mq_msgsi z e 也必须小于或等于 msgsi z e_max 限制。
此外,就算是特权进程,attr->mq_maxmsg 也不能超过 H ARD_MAX 限制。
(参看 mq_o v er v ie w(7) 了解限制的更多细节。
) EM F ILE 进程已经达到打开的文件和消息队列的最大数目。
ENAME T OOLON G name太长了。
EN F ILE 达到系统允许打开文件个数和消息队列的全局上限。
ENOEN T O_CREA T没有在 oflag 里指定,并且没有名字 name 的队列存在。
ENOEN T name 只是 "/" 而没有其它字符。
ENOMEM 内存不足。
ENOSPC 没有足够的内存来创建新的消息队列。
这个可能是因为达到 queues_max 限制而引起的,参考mq_o v er v ie w(7)。
mq_close - 关闭一个消息队列描述符概要#include <mqueue.h>int mq_close(mqd_t mqdes);需要 -lrt 来链接。
描述mq_close() 关闭消息队列描述符 mqdes。
如果调用进程在消息队列 mqdes绑定了通知请求,那么这个请求被删除,此后其它进程就可以绑定通知请求到此消息队列。
返回值成功时,mq_close() 返回0;错误时,返回 -1,并把 errno设置为合适的值。
错误 E B AD F mqdes 指定的描述符无效。
mq_getattr, mq_setattr - 取得/设置消息队列属性概要#include <mqueue.h>int mq_getattr(mqd_t mqdes, struct mq_attr *attr);int mq_setattr(mqd_t mqdes, struct mq_attr *ne w attr,structmq_attr *oldattr);需要 -lrt 来链接。
描述mq_getattr() 和mq_setattr() 取得和更改mqdes引用的消息队列的属性。
mq_getattr() 在 attr 指向的内存里返回一个 mq_attr 结构体。
这个结构定义为:struct mq_attr {long mq_flags; /* 标志:0 或 O_NON B LOC K */long mq_maxmsg; /* 队列中消息个数最大值 */long mq_msgsi z e; /* 消息大小最大值 */long mq_curmsgs; /* 队列中当前消息个数 */};mq_flags 的域包含打开消息队列描述符相关的标志。
这个标志由mq_open(3) 初始化。
能存在于这个标志的域只有 O_NON B LOC K。
mq_maxmsg和mq_msgsi z e两个域由mq_open(3) 在队列创建时设置的。
mq_maxmsg 是使用 mq_sen(3) 发送数据大小的上限。
mq_msgsi z e 是当前队列可以缓存消息个数的上限。
用于设置这些域的软上限的两个 /proc 文件在 mq_open(3) 中有描述。
mq_curmsgs域用于返回当前队列里已经有消息个数。
mq_setattr() 设置消息队列的属性,设置时使用由ne w attr 指针指向的mq_attr 结构的信息。
属性中只有标志 mq_flasgs 里的 O_NON B LOC K 标志可以更改,其它在 ne w attr 内的域都被忽略。
如果oldattr 不是空指针,那么它指向的内存用于返回现有的属性结构mq_attr,此时包含信息与通过mq_getattr() 取得的信息相同。
返回值成功时 mq_getattr() 和mq_setattr() 返回0;错误时,-1被返回,并同时设置errno 值来指明错误。
错误 E B AD F mqdes 指定的描述符无效。
EIN V AL ne w attr->mq_flags 包含除O_NON B LOC K 之外的位。
mq_notify - 注册一个当消息到达时的通知概要#include <mqueue.h>int mq_notify(mqd_t mqdes, const struct sige v ent *se v p);需要 -lrt 来链接。
描述mq_notify() 允许调用进程针对 mqdes引用的空队列注册或注销新消息异步通知的递送。
se v p 参数是一个指向 sige v ent 结构的指针。
关于这个结构的定义与相关细节,见sige v ent(7)。
如果se v p 是一个非空指针,那么mq_notify() 注册调用进程以在消息到达时收到通知。
se v p 指向的 sige v ent 结构中的 sige v_notify域用于指明通知的方式。
这个域可以有如下几个值:SI G E V_NONE 一个“空”通知:调用进程作为通知的目标被注册,但是当消息达到时,没有通知被递送。
SI G E V_SI G NAL 通过发送在 sige v_signo 指定的信号来通知进程。
见sige v ent(7) 中的细节描述。
siginfo_t 结构中的 si_code域将被设置为SI_MES GQ。
进一步说,si_pid将被设置为发送消息的进程的进程 ID,同时 si_uid将被设置为发送进程的真实用户 ID。
SI G E V_TH READ 当消息到达时,启动一个新线程来调用 sige v_notify_function。
参见sige v ent(7) 来了解其中细节。
对于一个消息队列只能有一个进程可以注册到达通知。
如果se v p 是 N U LL,并且调用进程当前已经在相应的队列里注册过通知,则这个注册被删除;此后其它进程就可以注册到这个队列里以接收通知。
消息通知只有在一个新消息到达且之前队列是空的情况下被递送。
如果mq_notify() 调用时队列非空,则通知会在队列变空之后且有新消息到达时递送。
如果其它进程或线程正在通过 mq_recei v e(3) 等待一个空队列的消息到达,则任何新到达的消息都被忽略:这些消息会传递给调用 mq_recei v e(3) 进程或线程,而消息通知注册仍然有效。
通知只发生一次:在一个通知递送之后,这个通知注册会被删除,并且其它进程可以注册一个通知。