机械设计基础课后习题答案
机械设计基础课后题答案

机械设计基础课后题答案1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合( 1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;(2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: ( 1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础 课后习题答案 第三版 高等教育出版社课后答案(1-18章全)
机械设计基础课后习题答案第三版高等教育出版社课后答案(1-18章全)机械设计基础课后习题答案第三版高等教育出版社目录第 1 章机械设计概述??????????????????????????????????????????????????????????????????? ????????????????????????????????? 1第 2 章摩擦、磨损及润滑概述??????????????????????????????????????????????????????????????????? ????????????????? 3第 3 章平面机构的结构分析??????????????????????????????????????????????????????????????????? ????????????????????? 12第 4 章平面连杆机构??????????????????????????????????????????????????????????????????? ????????????????????????????????? 16第 5 章凸轮机构??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????36第 6 章间歇运动机构??????????????????????????????????????????????????????????????????? ????????????????????????????????? 46第7 章螺纹连接与螺旋传动??????????????????????????????????????????????????????????????????? ????????????????????? 48第8 章带传动??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????????60第9 章链传动??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????????73第10 章齿轮传动??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????80第11章蜗杆传动??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????112第12 章齿轮系??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????????124第13 章机械传动设计???????????????????????????????????????????????????????????????????????????????????????????????????? 131第14 章轴和轴毂连接??????????????????????????????????????????????????????????????????? ????????????????????????????????? 133第15 章轴承??????????????????????????????????????????????????????????????????? ??????????????????????????????????????????????????138第16 章其他常用零、部件??????????????????????????????????????????????????????????????????? ????????????????????????? 152第17 章机械的平衡与调速??????????????????????????????????????????????????????????????????? ????????????????????????? 156第18 章机械设计CAD 简介??????????????????????????????????????????????????????????????????? ???????????????????????163第1章机械设计概述1.1 机械设计过程通常分为哪几个阶段?各阶段的主要内容是什么?答:机械设计过程通常可分为以下几个阶段:1.产品规划主要工作是提出设计任务和明确设计要求。
机械设计基础课后答案(1-18章全)正式完全版

第11章 蜗杆传动11.1 蜗杆传动的特点及使用条件是什么?答:蜗杆传动的特点是:结构紧凑,传动比大。
一般在传递动力时,10~80i =;分度传动时只传递运动,i 可达1 000;传动平稳,无噪声;传动效率低;蜗轮一般用青铜制造,造价高;蜗杆传动可实现自锁。
使用条件:蜗杆传动用于空间交错(90)轴的传动。
用于传动比大,要求结构紧凑的传动,传递功率一般小于50kW 。
11.2 蜗杆传动的传动比如何计算?能否用分度圆直径之比表示传动比?为什么?答:蜗杆传动的传动比可用齿数的反比来计算,即1221i n n z z ==;不能用分度圆直径之比表示传动比,因为蜗杆的分度圆直径11d mq mz =≠。
11.3 与齿轮传动相比较,蜗杆传动的失效形式有何特点?为什么?答:蜗杆传动的失效形式与齿轮传动类似,有点蚀、弯曲折断、磨损及胶合。
但蜗杆传动中蜗轮轮齿的胶合、磨损要比齿轮传动严重得多。
这是因为蜗杆传动啮合齿面间的相对滑动速度大,发热严重,润滑油易变稀。
当散热不良时,闭式传动易发生胶合。
在开式传动及润滑油不清洁的闭式传动中,轮齿磨损较快。
11.4 何谓蜗杆传动的中间平面?中间平面上的参数在蜗杆传动中有何重要意义? 答:蜗杆传动的中间平面是通过蜗杆轴线且垂直于蜗轮轴线的平面。
中间平面上的参数是标准值,蜗杆传动的几何尺寸计算是在中间平面计算的。
在设计、制造中,皆以中间平面上的参数和尺寸为基准。
11.5 试述蜗杆直径系数的意义,为何要引入蜗杆直径系数q ?答:蜗杆直径系数的意义是:蜗杆的分度圆直径与模数的比值,即1q d m =。
引入蜗杆直径系数是为了减少滚刀的数量并有利于标准化。
对每个模数的蜗杆分度圆直径作了限制,规定了1~4个标准值,则蜗杆直径系数也就对应地有1~4个标准值。
11.6 何谓蜗杆传动的相对滑动速度?它对蜗杆传动有何影响?答:蜗杆传动的相对滑动速度是由于轴交角90∑=,蜗杆与蜗轮啮合传动时,在轮齿节点处,蜗杆的圆周速度1v 和蜗轮的圆周速度2v 也成90夹角,所以蜗杆与蜗轮啮合传动时,齿廓间沿蜗杆齿面螺旋线方向有较大的相对滑动速度s v ,其大小为s 1cos v v λ==。
机械设计基础课后习题与答案

机械设计基础课后习题与答案机械设计基础1-5至1-12 指出机构运动简图中的复合铰链、局部自度和虚约束,计算各机构的自度,并判断是否具有确定的运动。
1-5 解F=3n?2PL?PH=3?6?2?8?1=1 1-6 解F=3n?2PL?PH=3?8?2?11?1=1 1-7 解F=3n?2PL?PH=3?8?2?11?0=2 1-8 解F=3n?2PL?PH=3?6?2?8?1=1 1-9 解F=3n?2PL?PH=3?4?2?4?2=2 1-10 解F=3n?2PL?PH=3?9?2?12?2=1 1-11 解F=3n?2PL?PH=3?4?2?4?2=2 1-12 解F=3n?2PL?PH=3?3?2?3?0=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答: a )40?110?150?70?90?160,且最短杆为机架,因此是双曲柄机构。
b )45?120?165?100?70?170,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )60?100?160?70?62?132,不满足杆长条件,因此是双摇杆机构。
d )50?100?150?100?90?190,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD在水平位置上下各摆10度,且lCD?500mm,lAD?1000mm。
试用图解法求曲柄AB和连杆BC的长度;用式和式’计算此机构的最小传动角。
题2-5图解: 题意踏板CD在水平位置上下摆动10?,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
取适当比例图尺,作出两次极限位置AB1C1D和。
图量得:AC1?1037mm,AC2?1193mm。
AB2C2D解得:l1?l2?12121212?AC2?AC2?AC1??AC1?? 1193?1193?1037?1037??78mm ??1115mm 已知和上步求解可知:l1?78mm,l2?1115mm,l3?500mm,l4?1000mm 因最小传动角位于曲柄与机架两次共线位置,因此取??0和??180?代入公式计算可得:cos?BCD??l2?l3?l1?l4?2l1l4cos?2l2l3222 22 = 11152?500?78?100022?2?78?1000cos0?2 ?1115?500= ?BCD?? 或:cos?BCD?l2?l3?l1?l4?2l1l4cos?2l2l32222 =11152?5002?78?100022?2?78?1000cos18 0?2?1115?500= ?BCD?? 代入公式′,可知?min??BCD?? 3-1 题3-1图所示为一偏置直动从动件盘形凸轮机构。
(完整版)机械设计基础课后习题答案.

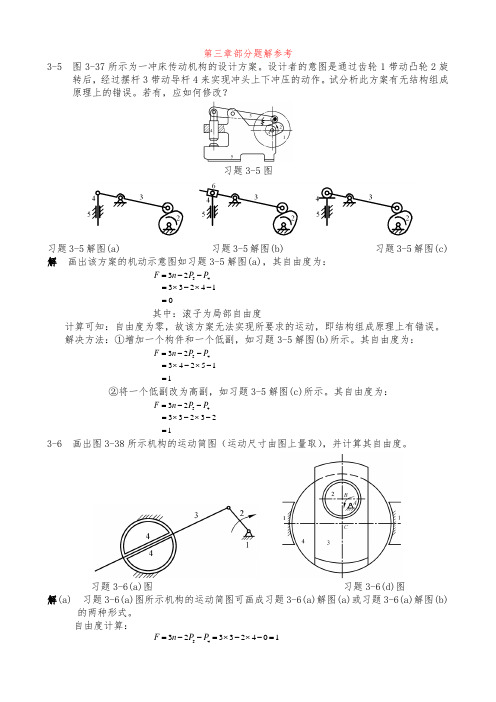
第三章部分题解参考3-5 图3-37所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮1带动凸轮2旋转后,经过摆杆3带动导杆4来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改?习题3-5图习题3-5解图(a) 习题3-5解图(b) 习题3-5解图(c) 解 画出该方案的机动示意图如习题3-5解图(a),其自由度为:14233 2345=-⨯-⨯=--=P P n F 其中:滚子为局部自由度计算可知:自由度为零,故该方案无法实现所要求的运动,即结构组成原理上有错误。
解决方法:①增加一个构件和一个低副,如习题3-5解图(b)所示。
其自由度为:115243 2345=-⨯-⨯=--=P P n F ②将一个低副改为高副,如习题3-5解图(c)所示。
其自由度为:123233 2345=-⨯-⨯=--=P P n F 3-6 画出图3-38所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。
习题3-6(a)图 习题3-6(d)图解(a) 习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(a)解图(a)习题3-6(a)解图(b)解(d) 习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)或习题3-6(d)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(d)解图(a) 习题3-6(d)解图(b)3-7 计算图3-39所示机构的自由度,并说明各机构应有的原动件数目。
解(a) 10102732345=-⨯-⨯=--=P P n FA 、B 、C 、D 为复合铰链原动件数目应为1说明:该机构为精确直线机构。
当满足BE =BC =CD =DE ,AB =AD ,AF =CF 条件时,E 点轨迹是精确直线,其轨迹垂直于机架连心线AF解(b) 1072532345=-⨯-⨯=--=P P n FB 为复合铰链,移动副E 、F 中有一个是虚约束 原动件数目应为1说明:该机构为飞剪机构,即在物体的运动过程中将其剪切。
机械设计基础课后习题答案.
第三章部分题解参考3-5 图3-37所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮1带动凸轮2旋转后,经过摆杆3带动导杆4来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改?习题3-5图习题3-5解图(a) 习题3-5解图(b) 习题3-5解图(c) 解 画出该方案的机动示意图如习题3-5解图(a),其自由度为:14233 2345=-⨯-⨯=--=P P n F 其中:滚子为局部自由度计算可知:自由度为零,故该方案无法实现所要求的运动,即结构组成原理上有错误。
解决方法:①增加一个构件和一个低副,如习题3-5解图(b)所示。
其自由度为:115243 2345=-⨯-⨯=--=P P n F ②将一个低副改为高副,如习题3-5解图(c)所示。
其自由度为:123233 2345=-⨯-⨯=--=P P n F 3-6 画出图3-38所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。
习题3-6(a)图 习题3-6(d)图解(a) 习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(a)解图(a)习题3-6(a)解图(b)解(d) 习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)或习题3-6(d)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(d)解图(a) 习题3-6(d)解图(b)3-7 计算图3-39所示机构的自由度,并说明各机构应有的原动件数目。
解(a) 10102732345=-⨯-⨯=--=P P n FA 、B 、C 、D 为复合铰链原动件数目应为1说明:该机构为精确直线机构。
当满足BE =BC =CD =DE ,AB =AD ,AF =CF 条件时,E 点轨迹是精确直线,其轨迹垂直于机架连心线AF解(b) 1072532345=-⨯-⨯=--=P P n FB 为复合铰链,移动副E 、F 中有一个是虚约束 原动件数目应为1说明:该机构为飞剪机构,即在物体的运动过程中将其剪切。
《机械设计基础》课后习题答案

模块八一、填空1、带传动的失效形式有打滑与疲劳破坏。
2、传动带中的的工作应力包括拉应力、离心应力与弯曲应力。
3、单根V带在载荷平稳、包角为180°、且为特定带长的条件下所能传递的额定功率P0主要与带型号、小轮直径与小轮转速有关。
4、在设计V带传动时,V带的型号根据传递功率与小轮转速选取。
5、限制小带轮的最小直径就是为了保证带中弯曲应力不致过大。
6、V带传动中,限制带的根数Z≤Z max,就是为了保证每根V带受力均匀(避免受力不均)。
7、V带传动中,带绕过主动轮时发生带滞后于带轮的弹性滑动。
8、带传动常见的张紧装置有定期张紧装置、自动张紧装置与张紧轮等几种。
9、V带两工作面的夹角θ为40°,V带轮的槽形角ϕ应小于θ角。
10、链传动与V带传动相比,在工况相同的条件下,作用在轴上的压轴力较小,其原因就是链传动不需要初拉力。
11、链传动张紧的目的就是调整松边链条的悬垂量。
采用张紧轮张紧时,张紧轮应布置在松边,靠近小轮,从外向里张紧。
二、选择1、平带、V带传动主要依靠(D)来传递运动与动力。
A.带的紧边拉力;B.带的松边拉力;C.带的预紧力;D.带与带轮接触面间的摩擦力。
2、在初拉力相同的条件下,V带比平带能传递较大的功率,就是因为V带(C)。
A.强度高;B.尺寸小;C.有楔形增压作用;D.没有接头。
3、带传动正常工作时不能保证准确的传动比,就是因为(D)。
A.带的材料不符合虎克定律;B.带容易变形与磨损;C.带在带轮上打滑;D.带的弹性滑动。
4、带传动在工作时产生弹性滑动,就是因为(B)。
A.带的初拉力不够;B.带的紧边与松边拉力不等;C.带绕过带轮时有离心力;D.带与带轮间摩擦力不够。
5、带传动发生打滑总就是(A)。
A.在小轮上先开始;B.在大轮上先开始;C.在两轮上同时开始;D不定在哪轮先开始。
6、带传动中,v1为主动轮的圆周速度,v2为从动轮的圆周速度,v为带速,这些速度之间存在的关系就是(B)。
机械设计基础课后习题答案

机械设计基础第1章平面机构自由度习题解答1-1至1-4 绘制机构运动简图。
1-11-21-31-41-5至1-12 计算机构自由度局部自由度虚约束局部自由度1-5 有一处局部自由度(滚子),有一处虚约束(槽的一侧),无复合铰链n=6 P L=8 P H=1 F=3×6-2×8-1=11-6 有一处局部自由度(滚子),无复合铰链、虚约束n=8 P L=11 P H=1 F=3×8-2×11-1=11-7 无复合铰链、局部自由度、虚约束n=8 P L=11 P H=0 F=3×8-2×11-0=21-8 无复合铰链、局部自由度、虚约束n=6 P L=8 P H=1 F=3×6-2×8-1=11-9 有两处虚约束(凸轮、滚子处槽的一侧),局部自由度1处,无复合铰链n=4 P L=4 P H=2F=3×4-2×4-2=21-10 复合铰链、局部自由度、虚约束各有一处凸轮、齿轮为同一构件时,n=9 P L=12 P H=2F=3×9-2×12-2=1凸轮、齿轮为不同构件时n=10 P L=13 P H=2 F=3×10-2×13-2=2 图上应在凸轮上加一个原动件。
1-11 复合铰链一处,无局部自由度、虚约束n=4 P L=4 P H=2 F=3×4-2×4-2=21-12 复合铰链、局部自由度、虚约束各有一处n=8 P L=11 P H=1 F=3×8-2×11-1=1(此文档部分内容来源于网络,如有侵权请告知删除,文档可自行编辑修改内容,供参考,感谢您的配合和支持)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1章
习题1-1至1-4
习题1-5至1-12答案
3,4,0321
L H L H n p p F n p p ====--=3,4,0
321
L H L H n p p F n p p ====--=3,4,0321
L H L H n p p F n p p ====--=3,4,0
321
L H L H n p p F n p p ====--=1-1 1-2
1-3
1-4
1109,12,2,3(2)1
L H L H n P P F n P P -====-+=、194,4,2,3(2)2
L H L H n P P F n P P -====-+=、186,8,1,3(2)1
L H L H n P P F n P P -====-+=、178,11,0,3(2)2
L H L H n P P F n P P -====-+=、168,11,1,3(2)1
L H L H n P P F n P P -====-+=、156,8,1,3(2)1
L H L H n P P F n P P -====-+=、
第2章
2-1
)401107090)))a b c d +<+∴、,并且最短杆为机架,是双曲柄机构;、曲柄摇杆机构、双摇杆机构、双摇杆机构
1123,3,0,3(2)3
L H L H n P P F n P P -====-+=、1114,4,2,3(2)2
L H L H n P P F n P P -====-+=、
2-6(1)作图求解过程参考曲柄摇杆机构设计(P32)2-7
如图,求解思路
1、任选一点为C1,由C1C2=50mm,得C2
2、过C2作C1C2垂线,并过C1作一条直线
与C1C2夹角为90˚-θ,得P点。
3、由C1、C2、P点求圆,在圆上由到C1C2
距离为16mm,得到A点。
4、AB+BC=AC2
BC-AB=AC1
5、得AB=(AC2-AC1)/2,得到B点。
分别
求得AB,BC。
第三章
3-1
过B点作偏心圆的切线,交基圆与C点则AOC
∠
为推程角(注意:直接连接AOB
∠不正确)
(原来讲课时有错误,请参考此处答案)
90˚-θ
A
C1 C2
P
C
3-2
1、以O 为圆心,OE 为半径画圆,过D 点作偏 心圆的切线,求得E 点在D 点处的位置E2 (DE2为D 点处输出件运动方向)。
2、作线CD (CD 为D 点处输出件受力方向)。
3、求得α
第4章
4-1
Solution m=3mm, Z1=19, Z2=41 d 1=mZ 1=3×19=57mm d 2=mZ 2=3×41=123mm h a1=h a *m=1×3=3mm h a2=h a *m=1×3=3mm=h a1 h f1= (ha *+c *) m=1.25×3=3.75mm h f2= (h a *+c *) m=1.25×3=3.75mm=h f1 c 1= c * m=0.25×3=0.75mm c 2= c *m=0.25×3=0.75mm=c 1 a= (Z 1+Z 2) m ⁄ 2=3×60 ⁄ 2=90mm d a1= d 1+2ha *m=57+2×3=63mm
d a2= d 2+2ha *m=123+2×3=129mm
d f1= d 1-2(ha *+c *) m=57-7.5=49.5mm d f2= d 2-2(ha *+c *) m=123-7.5=115.5mm d b1= d 1cos α=57×cos20˚=53.56mm d b2= d 2cos α=123×cos20˚=115.58mm p 1=π×m=π×3=9.42mm p 2=π×m=π×3=9.42mm=p 1 s 1=π×m ⁄ 2=4.71mm s 2=π×m ⁄ 2=4.71mm=s 1
e 1=π×m ⁄ 2=4.71mm
e 2=π×m ⁄ 2=4.71mm=e 1
4-2
1212
2()42m a a z z m mm z z =
+==+由得 112280240d mZ mm d mZ mm ====
E
E2 α
第5章
5-3答案
注意图中S 、6、7同轴;
M 、9、3、2同轴;H 、12同轴;
21m 1z 1i z 6=
=; 2461S 1351
i 360z z z z z z == 21012
1H 1911
i 2z z z z z z =
=
11160sm m s i i i ∴=
•= 11112mH H m
i i i =•=
5-5
上面大吊钩(3)为机架(图示) 则有行星轮系:1(s)-2(2')-3-H
231131312'
19H H
H H Z Z n n i i n n Z Z -=
=-=-=--
110H sH i i ∴==
5-8
Solution 行星轮系1-2(2')-3-H
231131312'
1H
H
H H Z Z n n i i n n Z Z -=
=-=--
231112'308011 3.42050H H
Z Z n
i Z Z n ⨯∴=+
=+==⨯
50
14.71/min 3.4
H n r ∴=
=
5-9
Solution 差动轮系1-2(2')-3-H
H 231H 133H 122575
3.1253020
z z n n i n n z z '-⨯=
=-=-=--⨯
13
H 3.1254.125
n n n +=
n1、n3转向相反时
H 200 3.12550
10.6r/min 4.125
n -⨯=
=
系杆H 与齿轮1转向相同
第11章
11-7和11-8题答案
11-9解(1)要使中间轴上两齿轮的轴向力方向相反,则低速级斜齿轮3的螺旋经方向应与齿轮2的旋向同为左旋,斜齿轮4的旋向应与齿轮3的旋向相反,为右旋。
(2)由题图可知:、、、、
分度圆直径轴向力
要使轴向力互相抵消,则:
即
12-2
解:(1)从图示看,这是一个左旋蜗杆,因此用右手握杆,四指,大拇指,可以
得到从主视图上看,蜗轮顺时针旋转。
F t1
F a1t2
F a2
( 2)由题意,根据已知条件,可以得到蜗轮上的转矩为
蜗杆的圆周力与蜗轮的轴向力大小相等,方向相反,即:
蜗杆的轴向力与蜗轮的圆周力大小相等,方向相反,即:
蜗杆的径向力与蜗轮的径向力大小相等,方向相反,即:
各力的方向如图 12-3所示。
第13章
改错1:某齿轮减速器的输出轴轴系结构如图所示,试指出其设计错误之处,并画出正确图形.
题16-81图
1、键的位置和尺寸不合适;
2、轴承端盖此处的直径太大;
3、此处应有密封圈;
1
2 3
4 5 6
7
8
9 10
4、此处应有螺钉联接(把轴承端盖和机架联接起来);
5、此处应有垫片;
6、套筒直径太大,超过轴承内圈高度;
7、安装齿轮处的轴的直径应小于齿轮宽度;
8、轴承左端没有定位
9、此处应有垫片;
10、此处应有螺钉联接(把轴承端盖和机架联接起来);
改错2、分析下图轴的结构是否合理,如不合理请说明理由并改正。
答:1、轴直径应是中间最大,向两头递减(拆装要求)
2、左轴承的右边定位太高,不利于拆卸。
把右边轴台阶改为套筒定位。
3、轴上键槽应布置在同一直线上。
4、套筒太高,减小套筒直径
5、端盖上应安装密封圈。
6、此处轴长度应小于链轮轴线长度。
7、链轮右端应采用轴端档圈固定。
8、键太长,减小键长度。
1
2
3
4 5
6
7
8。