ARM指令集学习总结材料
ARM汇编语言指令总结

ARM汇编语⾔指令总结ARM处理器有9种寻址⽅式:1、寄存器寻址,2、⽴即寻址,3、寄存器器移位寻址,4、寄存器间接寻址,5、基址寻址,6、多寄存器寻址,7、堆栈寻址,8、块拷贝寻址,9、相对寻址。
ARM指令集:ARM指令基本格式如下:{}{S} ,{,}其中<>的内容是必须的,{}的内容是可选的。
OPCODE指令助记符,COND执⾏条件,S是否影响CPSR中的值,Rd⽬标寄存器,Rn 第⼀个操作数的寄存器,OPERAND2第⼆个操作数。
灵活的使⽤第2个操作数“operand2”能够提⾼代码效率。
它有如下的形式:1)#immed_8r ——常数表达式;2)Rm——寄存器⽅式;3)Rm,shift——寄存器移位⽅式(ASR算术右移,LSL逻辑左移,LSR 逻辑右移,ROR循环右移,RRX带扩展的右移1位)。
COND执⾏条件:下⾯介绍ARM指令:1、存储器访问指令。
存储器访问指令分为单寄存器操作指令和多寄存器操作指令。
单寄存器操作指令LDR/STR指令⽤于对内存变量的访问、内存缓冲区数据的访问、查表、外围部件的控制操作等。
LDR:从内存到寄存器,加载数据。
STR:将寄存器的数据存储到内存。
LDRB操作字节,LDRH操作半字,LDRSH操作有符号半字。
多寄存器操作指令LDM为加载多个寄存器;STM为存储多个寄存器。
允许⼀条指令传送16个寄存器的任何⼦集或所有寄存器。
它们主要⽤于现场保护、数据复制、常数传递等。
进⾏数据复制时,先设置好源数据指针和⽬标指针,然后使⽤块拷贝寻址指令LDMIA/STMIA(传送后地址加4)、LDMIB/STMIB(传送前地址加4)、LDMDA/STMDA(传送后地址减4)、LDMDB/STMDB(传送前地址减4)进⾏读取和存储。
进⾏堆栈操作操作时,要先设置堆栈指针(SP),然后使⽤堆栈寻址指令STMFD/LDMFD(满递减堆栈)、STMED/LDMED(空递减堆栈)、STMFA/LDMFA(满递增堆栈)和STMEA/LDMEA(空递增堆栈)实现堆栈操作。
-ARM指令集报告

LDRH R1,[R0,#20]
12:15
;R1←mem16[R0+20]
24
3.2.6堆栈寻址
堆栈是一种数据结构,按先进后出( First In Last Out , FILO )的方式工作,使用一个称作堆栈指针 的专用寄存器指示当前的操作位置,堆栈指针总是 指向栈顶。 当堆栈指针指向最后压入堆栈的数据时,称为满堆 栈(Full Stack),而当堆栈指针指向下一个将要放 入数据的空位置时,称为空堆栈(Empty Stack)。 即访问存储器时,存储器的地址向高地址方向生长, 称为递增堆栈(ascending stack)。 存储器的地址 向低地址方向生长,称为递减堆栈(descending stack)。
12:15 9
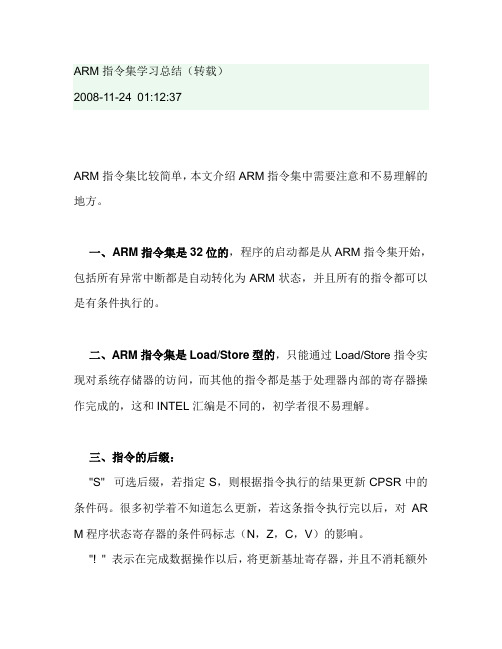
条件域表1
条件码 0000 0001 0010 后缀 EQ NE CS 标志 Z置位 Z清零 C置位 相等 不等
无符号>=
含义
0011
0100 0101 0110 0111
12:15
CC
MI PL VS VC
C清零
N置位 N清零 V置位 V清零
无符号<
负 正或零 溢出 未溢出
10
条件域表2
11
3.1.3指令分类及指令格式
ARM 指令集可以分为六大类,分别为数据 处理指令、Load/Store指令、跳转指令、程序状 态寄存器处理指令、协处理器指令和异常产生 指令。
12:15
12
指令格式使用举例:
LDR R0,[R1]
BEQ DATAEVEN ADDS R2,R1,#1
;读取R1地址上的存储单元内容, 执行条件AL
LDR r0,[r1,r2];r0<—mem32[r1+r2]
arm的知识点总结

arm的知识点总结ARM处理器架构的特点有很多,包括:1. 精简指令集:ARM处理器使用精简的指令集,使其在相同的时钟周期内执行更多的指令。
这有助于提高处理器性能和效率。
2. 低功耗设计:ARM处理器具有低功耗设计,使其在电池供电的移动设备中表现出色。
它在相同性能水平下消耗的能量更少,可延长设备的续航时间。
3. 易扩展性:ARM架构具有很强的可扩展性,可以从简单的嵌入式系统到复杂的服务器系统等不同领域应用。
4. 多样化产品线:ARM公司提供多种不同的处理器核心,包括Cortex-A、Cortex-R和Cortex-M系列,能够满足不同应用领域的需求。
5. 兼容性:ARM架构保持了向后兼容性,旧版本的软件可以在新版本的处理器上运行,这使得升级系统更加容易。
ARM处理器的应用领域非常广泛,主要包括以下几个方面:1. 移动设备:包括智能手机、平板电脑、便携式游戏机等。
ARM处理器在移动设备的低功耗和高性能需求下表现优异。
2. 智能家居:包括智能音箱、智能家电、智能监控等。
ARM处理器在小型嵌入式设备中的低功耗和高性能要求下发挥作用。
3. 工业控制:包括自动化生产线、机器人控制、传感器网络等。
ARM处理器在工业环境下的可靠性和低功耗表现得较好。
4. 汽车电子:包括车载娱乐系统、车载导航系统、车载通信系统等。
ARM处理器在汽车电子设备中的高性能和低功耗要求下表现出色。
5. 服务器与数据中心:ARM处理器在云计算、大数据分析等方面逐渐发展起来,其低功耗和高核心密度使其成为一种有潜力的替代方案。
在ARM处理器架构中,最常见的是Cortex系列处理器核心。
Cortex系列核心包括Cortex-A、Cortex-R和Cortex-M,它们分别面向不同的应用领域:1. Cortex-A系列:面向高性能应用,如智能手机、平板电脑、智能电视等。
它具有复杂的流水线设计和乱序执行功能,能够提供出色的性能。
2. Cortex-R系列:面向实时应用,如汽车电子系统、工业控制系统、网络设备等。
arm实训总结
arm实训总结标题:ARM实验实训总结报告一、前言本次ARM实验实训是我对嵌入式系统设计与开发的一次深度实践。
通过这次实训,我对ARM微处理器的结构原理、指令集以及基于ARM架构的嵌入式系统开发流程有了更为直观和深入的理解。
二、实训内容回顾在实训过程中,我们主要围绕ARM Cortex-M系列处理器进行学习和实践。
首先,从理论层面,我们系统地学习了ARM体系结构、工作模式、存储器管理、异常处理等基础知识;其次,在实践环节,我们使用Keil MDK等开发工具进行了汇编和C语言编程,完成了中断服务程序设计、定时器应用、串口通信等多个实战项目。
三、实训过程及收获1. 硬件操作与调试:通过对ARM开发板的实际操作,我亲身体验了硬件连接、程序下载、在线调试等环节,对硬件底层的工作原理有了更清晰的认识,也锻炼了我的动手能力和问题解决能力。
2. 软件编程与实现:通过编写和调试ARM汇编和C语言代码,我对ARM的指令集、寄存器配置、中断处理机制等有了深入理解,同时也提升了我的编程技能和逻辑思维能力。
3. 团队协作与交流:在完成复杂项目的过程中,我们分工合作,共同探讨解决方案,这不仅提高了我在团队环境下的工作效率,也锻炼了我与他人沟通协调的能力。
四、实训反思与展望尽管在实训过程中取得了一定的进步,但我也意识到自身在某些方面还有待提升,如对实时操作系统RTOS的理解与应用、硬件驱动程序的设计与优化等。
未来的学习中,我将深化对这些领域的研究,努力提升自己在嵌入式系统开发方面的综合能力。
总结,此次ARM实训是一次宝贵的实践经历,它使我对嵌入式系统的软硬件协同设计有了更深层次的认知,并为我后续从事相关领域的工作或研究打下了坚实的基础。
五、结语ARM实训不仅是对我现有知识的检验,更是对未来专业技能的磨砺。
我会珍视这份实践经验,以此为契机,持续探索并深化对嵌入式系统尤其是ARM架构技术的研究,为我国的科技创新事业贡献自己的力量。
arm实验心得体会
arm实验心得体会在进行arm实验的过程中,我收获了很多知识和经验,也体会到了实验的重要性和意义。
以下是我关于arm实验的心得体会。
首先,在实验中我学习到了关于arm架构的基本知识。
arm架构是一种广泛应用于手机、平板电脑和嵌入式领域的处理器架构。
在实验中,我了解到arm指令集的特点和分类,学会了如何通过汇编语言来编写arm程序。
我能够区分不同的arm寄存器,并熟练运用指令进行数据的读取和存储。
这些知识对于我进一步学习和了解计算机体系结构非常重要。
其次,实验也让我体会到了手动编写程序的乐趣和挑战。
在arm实验中,我需要亲自编写指令并进行调试,这与平时使用高级语言编程的经验完全不同。
手动编写程序需要思考指令的功能和执行顺序,同时需要十分严谨地进行调试和错误修复。
这些挑战锻炼了我的逻辑思维和问题解决能力,同时也为我今后的编程学习打下了良好的基础。
另外,实验还让我深刻认识到了实践的重要性。
光靠理论知识是无法真正掌握一个技能的,必须通过实践来加深理解和应用。
通过亲自编写arm程序,我更加深入地了解了计算机的工作原理和指令执行的过程。
实验也让我意识到了实际操作中可能出现的各种问题和错误,从而提醒我在编程过程中要更加仔细和谨慎。
我在实验中多次因为一小处错误导致程序无法正确执行,这让我更加重视细节和精确性。
此外,实验还提高了我的团队合作能力。
在实验中,我需要与同学们共同研究和解决问题。
通过合作,我们相互帮助、交流意见,并共同进步。
我们互相监督和鼓励,共同完成实验目标。
这锻炼了我的沟通能力和合作能力,也培养了我对团队合作的重视和珍惜。
最后,实验让我对计算机领域的未来充满了信心和热情。
通过亲身参与arm实验,我深刻认识到计算机技术在现代社会中的重要性和广泛应用。
我对于未来计算机技术的发展和创新充满了期待,并希望自己能够为这个领域的进步做出一份贡献。
实验不仅是对知识的检验和巩固,更是对自己兴趣和激情的验证和启发。
总之,通过这次arm实验,我收获了很多知识和经验,也体验到了手动编写程序的乐趣和挑战。
初学arm知识总结

嵌入式平板电脑mips方案和X86方案的比较
般采用退出商业领域的PC机器来应用于不太复杂的工业应用,机器的寿命会受到一定程度的影响。而MISP方案则是专门为工业控制实际应用量身定做的,更加专业实用。
WINCE6.0系统下全面测评S3C6410处理器性能
WINCE6.0系统下全面测评S3C6410处理器性能
WINCE6.0系统下全面测评S3C6410处理器性能
WINCE6.0系统下全面测评S3C6410处理器性能
WINCE6.0系统下全面测评S3C6410处理器性能
WINCE6.0系统下全面测评S3C6410处理器性能
WINCE6.0系统下全面测评S3C6410处理器性能
WINCE6.0系统下全面测评S3C6410处理器性能
2010—S3C6410的疯狂,主频的极限在哪里?
2008年下半年,三星公司推出S3C6410X芯片,大部分的生产厂家都用的ARM1176JZF-S内核,到现在为止很多都推出了S3C6410芯片的开发板。前面的在完善和创新、后面的加紧脚步在追赶,市场一片火热!
01
009年来看,S3C6410慢慢的走出来。相对ARM9而言,在视频编解码、处理速度、2D/3D的加速等方面有很大的提升。在价值的提升同时,成本也在提升,那么价格同样会比ARM9高出不少。
ARM体系的各种异常的分析
中止异常 中止表示当前存储器的访问不能完成,是由外部的ABOUT输入信号引起的异常,分为两类: 预取指中止:由程序存储器引起的中止异常; 数据中止:由数据存储器引起的中止异常;
SUBS PC,R14_abt,#4 ;PC=R14 - 4
04
当程序发生预取指中止时,ARM内核将预取的指令标记为无效,但在指令到达流水线的执行阶段时才进入异常,因此当前PC的值为当前执行指令的地址+8(即正确的中断返回地址+4),因此R14保存的值是 中断返回地址+4 ,所以当修复了产生中止的原因后,不管在什么操作状态,处理器都会执行以下指令
ARM指令集学习总结(转载)
ARM指令集学习总结(转载)2008-11-24 01:12:37ARM指令集比较简单,本文介绍ARM指令集中需要注意和不易理解的地方。
一、ARM指令集是32位的,程序的启动都是从ARM指令集开始,包括所有异常中断都是自动转化为ARM状态,并且所有的指令都可以是有条件执行的。
二、ARM指令集是Load/Store型的,只能通过Load/Store指令实现对系统存储器的访问,而其他的指令都是基于处理器内部的寄存器操作完成的,这和INTEL汇编是不同的,初学者很不易理解。
三、指令的后缀:"S" 可选后缀,若指定S,则根据指令执行的结果更新CPSR中的条件码。
很多初学着不知道怎么更新,若这条指令执行完以后,对AR M程序状态寄存器的条件码标志(N,Z,C,V)的影响。
"! " 表示在完成数据操作以后,将更新基址寄存器,并且不消耗额外的时间。
如:LDR R0, [R1, #4] 他相当于R0 <- mem32[R1+4]R1 = R1+4;"^" LDMFD R13!, (R0-R3, PC)^ //"^"表示一条特殊形式的指令。
(在从存储器中装入PC的同时,CPSR也得到恢复)。
四、#号后面加0x或&表示十六进制:#0xFF, #&FF#号后面加0b表示二进制。
#号后面加0d表示十进制。
*******************************************************************************五、立即数寻址每个立即数都是采用一个8位的常数循环右移偶数位间接得到。
初学者不易理解:一个32位的指令不可能全部用来保存32位的立即数,所以从指令的编码格式上分析,在指令编码中只分配了12位来存储立即数,其中4位用来保存右循环值,8位用来保存一个常数,所以并不是每一个32位的立即数都是合法的。
学习arm的心得体会
学习arm的心得体会篇一:ARM学习心得体会ARM四天学习心得体会1.懂得了如何使用IAR的软件使用,使用前要先进行环境的设置,具体见文档IAR使用说明。
2.第一次是学习点亮LED灯,在点亮LED灯中学习到如果要点亮LED灯必须学会调用已经写好的库函数,对系统进行初始化SystemInit ;对IO口进行初始化GPIOInit ;,还得对GPIO口的设置GPIOSetDir--设置GPIO口为输入为1的IO口,设置完成后就可以对IO口成为输入输出方向,当要点亮LED灯时,要使用到GPIOSetValue();函数,当为确定好某个IO口确定时,后一个为0时可以设置LED灯为点亮了,然后就可以对IO口进行设置了,用法和单片机基本一致,具体可以参考程序《闪灯》。
3.蜂鸣器的鸣响很简单,就是首先对蜂鸣器的IO端口进行设定以驱动蜂鸣器,GPIOSetDir( PORT3, 3, 1 ); 当蜂鸣器需要鸣响时,直接对PORT3_3端口进行赋值0《GPIOSetValue( PORT3, 3, 0 ); 》不让蜂鸣器鸣响则是(GPIOSetValue( PORT3, 3, 01); )就可以了。
4.串口的使用串口开始时要初始化出口,并且通过串口打印前会把数据存在数据缓存区里面,如果我们需要通过输入值来控制ARM板子的功能时,可以读取缓存区(UARTBuffer[UARTCount-1])的内容(缓存区的内的数据都是字符型数据【char】)然后就可以通过输入的值来处理,可以用中断方式,也可以用查询方式,可参考串口中断程序5.中断的使用使用中断时需要初始化中断例如:init_timer32(TEST_TIMER_NUM,TIME_INTERVAL); // 初始化定时器 enable_timer32(TEST_TIMER_NUM); //使能定时器使定时器工作 LPC_SYSCON->SYSAHBCLKCTRL |= (1篇二:学习ARM的心得体会arm四天学习心得体会1.懂得了如何使用iar的软件使用,使用前要先进行环境的设置,具体见文档iar使用说明。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四、ARM7指令集(只看了ARM指令)
(一)说明
1.处理器指令都是助记符,代表了一串二进制代码。
2.指令LDMIA R5, {R2,R7,R8} ;是多寄存器寻址方式,意思是把R5中的数据作为地址,把这个地址的数据赋给R2,把R5的下一个地址的数据赋给R7,在把下一个地址的数据赋给R8,是一条无条件执行指令。
3.ARM指令特点:
4.指令可选后缀
(1)S后缀
(2)!后缀
!后缀的含义:在指令的地址表达式中含有!后缀时,指令执行后,基址寄存器中的地址将发生变化,变化结果为:
基址寄存器中的地址值(指令执行后)=指令执行前的值+地址偏移量
举例:LDMIA R3,[R0,#04]! ;R3←[R0+#04],使用!后缀
(1)B后缀
(4)T后缀
T后缀是一个很特殊的可选后缀,含义:指令在特权模式下对存储器的访问,将被存储器看成是用户模式的访问。
(5)条件后缀
在CPSR镇南关存放这条件标志位,他们反映了指令执行结果的某些特征,如两个数据比较结果是否相等,相加是否溢出等,在判断时,都要用到这些条件标志位,条件标志位往往引起程序分支。
例:
(二)指令集
ARM数据传送指令(存储器访问指令)
以ARM为核的单片机结构中,所有的外围模块(片内)都和存储单元一样,是ARM的不同地址单元,无论这些模块的功能如何(通信,输入输出,定时器,存储器等),也无论这些模块的位置在片内还是片外,ARM处理器都把它们视为外部存储器。
其操作和对存储器操作是相同的。
ARM处理器的数据传送指令只针对存储器,所以也可叫存储器访问指令。
把寄存器到存储器传送叫存储,把数据从存储器到寄存器的传送叫加载,ARM 只有两种数据传送:存储和加载。
举例:
其中LDR指令是把数据从外部存储器传送到内部寄存器的指令,也叫加载指令;STR指令是把数据从内部寄存器传送到外部存储器的指令,也称为存
使用语句标号,使用语句标号是寻址是一种简单有效的寻址方法,注意PC作用
(1)从寄存器到存储器的情况,一个字节的传送只能传送最低一个字节,如果要存储其他字节就需要移位操作,但是寄存器是32位结构,所以实际上有32位数据进入数据总线,只是把最低字节拷贝4次,这样四个字节都是一样的。
在进行字节传送时,要弄清楚存储器是否有单字节接受能力。
(2)从存储器到寄存器的加载过程
从存储器读出数据时,也是32位数据,ARM处理器执行指令时,把所选择的传送字节放在低8位,其余的用0填充。
(2)大端方式和小端方式
注意:
(1)指令的代码代表的是此助记符所表达的二进制是什么,了解这些有助于汇编调试。
(2)数据传送指令基本的就是LDR和STR然后再加上后缀后会衍生出很多。
在相对寻址中的相对偏移时,如STR R4,SRART 含义就是把R4中的数据存储到标号指向的地址单元中去,如果标号是程序所使用的一个标号,那么此语句的含义就是修改标号所指向的程序,是无法执行的指令,因此,在使用相对偏移存储指令时,一要注意语句标号不能指向程序存储器的程序存储区,要指向程序存储器的数据存储区和数据存储器的数据存储区。
二是所指向的区域是可修改的,如用户模式下,有些存储区是不能访问或是只读的。
(3)对语句LDR R4,START+0X4000,是一条错误的指令,因为程序相对偏移规定不得超过±4096字节。
分支指令
1.分支指令B和分支连接指令BL
程序简单跳转使用分支指令B;在需要保存跳转地址时,使用分支链接指令BL。
指令格式:
B[Cond] 偏移表达式
BL[Cond] 偏移表达式
说明:
(1)其中[Cond]是可选条件后缀,使用不受到限制。
(2)跳转的范围是±32M地址
(3)在执行跳转指令时,处理器并不保存状态寄存器CPSR。
2.分支和交换指令BX
在ARM指令集和THUMB指令集之间进行程序跳转时,,使用分支和交换指令BX。
指令格式:
BX[Cond] Rn
ARM数据处理指令
1. 注意
(1)ARM处理器的数据处理指令和外部存储器无关,而只涉及寄存器和立即数,也就是说数据处理指令是内部寄存器之间实现的的。
(2)前面的所有外部存储器的寻址方式,都不适用。
(3)一般采用寄存器寻址
(4)其中的数据传送指令只是内部寄存器之间的数据传送。
(5)数据处理指令和数据传送指令不同,数据处理指令大部分都会影响条件标志。
数控位移位方式,就是使用数值常量控制移位位数,另一种就是寄存器控位移位方式,就是使用一个寄存器控制移位位数。
注意第二操作数规范是一个8位的无符号数值常量,用0填充到32位后,循环右移偶次后得到的32位数值,例如下:
2.ARM数据处理指令详述
(1)数据传送指令MOV和MVN(只是在寄存器之间传和前面一种指令有区别)P116
(2)加法指令ADD、减法指令SUB、反减法指令RSB、带进位加法指令ADC、带借位减法指令SBC、带借位反减法指令RSC
P118
其中指令SUBNES就使用了后缀NE和后缀S,注意第二操作数规范并且必须要有第二操作数。
(4)比较和测试指令CMP、CMN、TEQ、和TST
P120
注意没有目标寄存器,在这些指令中不需要S后缀,也会刷新程序标志位,不保存比较结果。
(5)逻辑与指令AND、逻辑或指令ORR。
逻辑异或指令EOR和位清除指令
BIC
P123
注意在ARM汇编中,16进制用#0x做前缀,如#0x00FF是一个16进制数,二进制数使用#2_做前缀,如#2_00110011是一个二进制数。
(6)程序转态寄存器传送指令MRS和MSR
P127
注意在用户模式下不可以改变CPSR中的控制位[7:0],如果是MRS R0 ,CPSR 中不用指定位域;但是MSR SPSR(CPSR) ,R4这个就是错误的,没有指定位域。
(7)乘法指令MUL和乘加指令MLA
P129
(8)无符号长乘法指令UMULL和长乘加指令UMLAL,带符号长乘法指令SMULL 和长乘加指令SMLAL
P131
ARM指令集中和协处理器有关的指令
1.协处理器不能独立工作的芯片,必须和CPU一起工作,用来弥补处理器不能做复杂运算的缺点。
2.ARM有专门的指令实现对协处理器的操作。
(1)协处理器数据操作指令CDP
P133
(1)协处理器数据传送指令LDC和STC
P134
(2)协处理器寄存器传送指令MRC和MCR
P136
ARM指令集中的软件中断指令
1.ARM指令集中软件中断指令是唯一一条不使用寄存器的ARM指令吗,也是
一条可以条件执行的指令。
2.指令介绍
(1)软件中断指令SWI(重要)
P138(当需要软件中断时,执行软件中断指令)
ARM指令在用户迷失中受到很大的局限,有一些资源不能够访问,在需要访问
这些资源时,并且要使用软件控制,那么唯一方法就是使用软件中断指令。
举例:
SWI 0xFF00
SWI 0
作0,此时参数是0.
参考资料:(从51到ARM32位嵌入式系统入门)
实用标准文案文档。