初二物理杠杆总结
物理初二杠杆知识点总结归纳
物理初二杠杆知识点总结归纳杠杆是物理学中的一个重要概念,它在我们的日常生活和工作中有着广泛的应用。
初二学习杠杆知识点是为了帮助学生理解杠杆的原理和运用。
本文将对物理初二杠杆知识点进行总结和归纳。
一、什么是杠杆杠杆是由一个固定的支点和两个力作用点组成的一种简单机械,主要用于放大或改变力的方向。
杠杆可以分为一级杠杆、二级杠杆和三级杠杆,它们的支点和力的作用点位置不同。
二、杠杆的原理1. 杠杆平衡条件在杠杆平衡时,支点处的力矩之和为零。
力矩是力对支点的偏转效应,计算力矩需要考虑力的大小和力臂(力与支点的垂直距离)的乘积。
根据杠杆平衡条件,可以得出以下公式:力1 ×力臂1 = 力2 ×力臂2。
2. 不同的杠杆一级杠杆:力1与力2分别作用在支点两侧,力臂分别为力1的作用点到支点的距离和力2的作用点到支点的距离。
当力1 ×力臂1 = 力2 ×力臂2时,杠杆平衡。
二级杠杆:力和支点构成等边三角形,根据几何关系可以得出力的大小和力臂之间的关系。
力1 ×力臂1 = 力2 ×力臂2。
三级杠杆:力1和力2作用在支点同侧,力臂和力的大小成反比,力臂越长,需要的力越小。
三、杠杆的应用杠杆在我们的日常生活和工作中有许多应用。
以下是一些常见的例子:1. 钳子:钳子是一种杠杆,用于放大手的力,使其能够夹住较大的物体。
2. 门锁:门锁的设计利用了杠杆原理,使用较小的力来锁住较厚的门板。
3. 钻孔:使用手动钻或电动钻机钻孔时,手臂的上下运动也是一种杠杆运动。
4. 摇椅:摇椅的摇动也是利用杠杆原理,当我们施加力将椅子推动时,能够让椅子前后晃动。
四、注意事项1. 在使用杠杆时,要正确选择支点和力的作用点,根据杠杆原理计算力的大小和力臂的长度,以确保杠杆的平衡和安全。
2. 需要根据具体情况,选择合适的杠杆类型和杠杆长度,以实现所需的放大或改变力的效果。
结语:杠杆是物理学中的重要概念和工具,它在日常生活和工作中有着广泛的应用。
初中物理杠杆知识点汇总

初中物理杠杆知识点汇总
1、一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆。
支点——杠杆绕着转动的点;动力——使杠杆转动的力;阻力——阻碍杠杆转动的力;动力臂——从支点到动力作用线的距离;阻力臂——从支点到阻力作用线的距离。
当杠杆在动力和阻力作用下静止时,我们就说杠杆平衡了。
2、杠杆的平衡条件:动力×动力臂=阻力×阻力臂或F1L1=F2L2
3、杠杆的应用
省力杠杆:L1>L2F1<F2省力费距离;
费力杠杆:L1<L2F1>F2费力省距离;
等臂杠杆:L1= L2F1= F2不省力、不省距离,能改变力的方向。
等臂杠杆的具体应用:天平。
许多称质量的秤,如杆秤、案秤,都是根据杠杆原理制成的。
初二简单杠杆知识点归纳总结

初二简单杠杆知识点归纳总结杠杆作为物理学中的重要概念,也是人类生活和工作中经常运用的原理之一。
而初中生在理解和应用杠杆原理时,通常会遇到一些困惑和难点。
因此,本文将对初二简单杠杆知识点进行归纳总结,以帮助初中生更好地理解和应用杠杆原理。
一、什么是杠杆杠杆是一种简单机械,由杠杆杆臂和支点构成。
杠杆杆臂分为力臂和负重臂,支点位于杠杆的中间位置。
在杠杆原理中,力臂与负重臂之间的比例关系是杠杆原理的关键。
二、一级杠杆1. 一级杠杆的定义一级杠杆是指支点与力臂和负重臂之间的距离相等的杠杆。
在一级杠杆中,力和负重在不同位置的杠杆臂上发生作用,能够产生机械优势。
2. 一级杠杆的原理一级杠杆的杠杆原理可以用以下公式表示:力 ×力臂 = 负重 ×负重臂其中,力臂是从支点到力的作用点的距离,负重臂是从支点到负重的作用点的距离。
例如,当力臂为10cm,负重臂为5cm时,力为10N能够平衡15N 的负重。
三、二级杠杆1. 二级杠杆的定义二级杠杆是指力臂和负重臂的长度不相等的杠杆。
在二级杠杆中,力和负重的作用点分别在不同杠杆臂上,可以产生机械优势或劣势。
2. 二级杠杆的原理二级杠杆的原理可以用以下公式表示:力 ×力臂 = 负重 ×负重臂当力臂大于负重臂时,所施加的力比负重小,可以产生机械优势;当力臂小于负重臂时,所施加的力比负重大,会产生机械劣势。
例如,当力臂为8cm,负重臂为10cm时,力为20N能够平衡25N 的负重,产生机械优势。
四、简单杠杆的应用1. 千斤顶千斤顶是一种常见的简单杠杆应用,它通过外力对抵抗物的作用,通过杠杆原理达到举起重物的效果。
2. 钳子钳子也是一种常见的简单杠杆应用。
通过调整钳子的杠杆臂,可以改变施加力的大小,实现夹取、扭转等功能。
3. 梯子梯子也属于简单杠杆的应用之一。
当人站在离地较远的一侧时,重心作用在负重臂上,会导致杠杆失衡,从而引起梯子倾斜甚至倒下。
杠杆原理知识点

杠杆原理知识点杠杆原理是指在物体上施加一个作用力,以增加施力点到物体支撑点的距离,从而增加物体所受到的力矩或扭矩,进而提高物体的效能。
杠杆原理是力学中的基本原理之一,广泛应用于各个领域。
以下是杠杆原理的一些关键知识点:1.力臂:杠杆的力臂是指施力点到杠杆支点之间的垂直距离。
力臂越长,力矩越大。
2.支点:杠杆的支点是指杠杆上承受力的点。
杠杆的支点处不受力,仅承受力矩。
3.力矩:力矩是指力臂乘以作用力的大小,也可以理解为施加在物体上的力对物体的产生的旋转效果。
力矩的单位是牛顿米(N·m)。
4.杠杆原理的条件:根据平衡条件,杠杆在平衡状态下满足力矩的平衡,即杠杆两侧的力矩相等。
5.杠杆原理的三个要素:杠杆原理包括作用力、力臂和支点。
当一个杠杆处于平衡状态时,作用在杠杆上的力和力臂都满足力矩平衡条件。
6.杠杆的类型:常见的杠杆类型有一级杠杆、二级杠杆和三级杠杆。
一级杠杆的力臂在支点的同一侧,二级杠杆的力臂在支点的两侧,而三级杠杆则有两个支点。
7.杠杆的应用:杠杆原理在日常生活和工业生产中都有广泛的应用。
例如,使用杠杆原理可以轻松地将大石块移动,调节自行车的速度,提升重物等。
8.杠杆的力倍增效应:由于杠杆原理的存在,可以通过适当调整力臂的长度来增加力矩,从而实现力倍增效应。
这使得我们可以用较小的力量来做更大的工作。
总结起来,杠杆原理通过利用力臂和力矩平衡的原理,可以实现力量的倍增效应。
杠杆原理的应用广泛,不仅在日常生活中有着重要作用,也在工业、机械、建筑等领域中得到广泛应用。
掌握杠杆原理的知识,可以帮助我们更好地理解和应用这个原理,在解决问题和提高效率上发挥重要作用。
初二物理杠杆总结
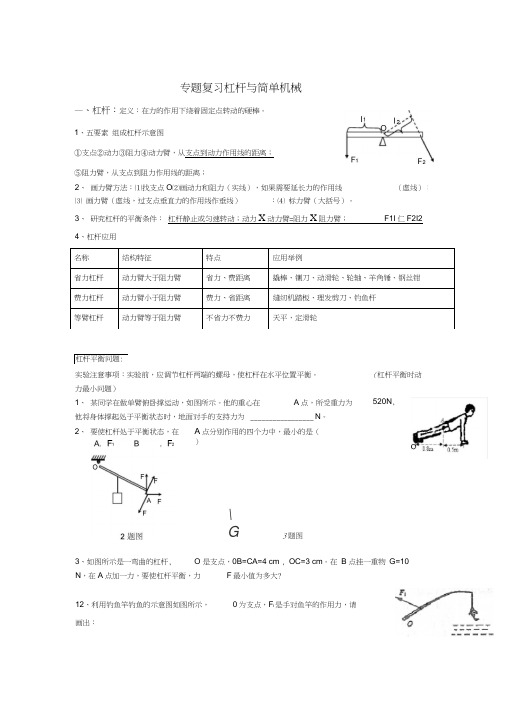
专题复习杠杆与简单机械—、杠杆:定义:在力的作用下绕着固定点转动的硬棒。
1、五要素组成杠杆示意图①支点②动力③阻力④动力臂,从支点到动力作用线的距离;⑤阻力臂,从支点到阻力作用线的距离;2、画力臂方法:⑴找支点O⑵画动力和阻力(实线),如果需要延长力的作用线(虚线);⑶ 画力臂(虚线,过支点垂直力的作用线作垂线):⑷ 标力臂(大括号)。
3、研究杠杆的平衡条件:杠杆静止或匀速转动;动力X动力臂=阻力X阻力臂;F1I仁F2I2名称结构特征特点应用举例省力杠杆动力臂大于阻力臂省力、费距离撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳费力杠杆动力臂小于阻力臂费力、省距离缝纫机踏板、理发剪刀、钓鱼杆等臂杠杆动力臂等于阻力臂不省力不费力天平,定滑轮4、杠杆应用杠杆平衡问题:实验注意事项:实验前,应调节杠杆两端的螺母,使杠杆在水平位置平衡。
(杠杆平衡时动力最小问题)1、某同学在做单臂俯卧撑运动,如图所示。
他的重心在A点,所受重力为他将身体撑起处于平衡状态时,地面对手的支持力为_________________ N。
2、要使杠杆处于平衡状态,在A点分别作用的四个力中,最小的是()3、如图所示是一弯曲的杠杆,\G 3题图520N,O 是支点,0B=CA=4 cm , OC=3 cm。
在B 点挂一重物G=10N,在A点加一力,要使杠杆平衡,力F最小值为多大?12、利用钓鱼竿钓鱼的示意图如图所示,0为支点,F i是手对鱼竿的作用力,请画出:13、怎样调节平衡螺母使杠杆平衡?1.作用在杠杆上的动力为50N,阻力为600N,杠杆恰好平衡,则杠杆的动力臂和阻力臂之比为。
(题型四)2. 如图12-24所示,杠杆每小格的长度相等,质量不计,以O为支点.杠杆的左端挂有物体M,支点右边的A处挂钩码,杠杆平衡.若将支点移到B点,要使杠杆重新平衡,在A点应挂 _____ 个相同的钩码。
(题型三)3. 如图12-25所示,AE为一根质量不计的细棒,用绳在O处吊起,当A、E两端分别挂两个重物甲、乙时恰好平衡•若OA =0.8m, OB =0.4m,甲的质量为10 kg,则乙的质量为kg.(题型四)4. 下列工具中,属于省力杠杆的是()(题型四)夹邮票用的镊子理发师修剪头发用的剪刀剪铁丝用的钢丝钳 D .钓鱼用的鱼竿图12-24A.B.5.如图12-26所示的杠杆中,动力的力臂用L表示,图中所画力臂正确的是()(题型一)C.图12-266. 在图12-27中画出力F1和F 2的力臂.(题型一)7. 如图12-28,工人师傅用吊车搬运集装箱.集装箱重G=2 X 104N,支撑杆对吊车臂的支持力为F.在图中画出集装箱所受重力的示意图和支持力F对转动点O的力臂.(题型一)图12-28&工人剪铁皮时,有时用两根铁管套在剪刀柄上(如图12-29),这是什么道理?(题型四)9 .在研究“杠杆的平衡条件”实验中,有一组同学猜想杠杆的平衡条件可能是“动力+动力臂=阻力+阻力臂”。
物理初二杠杆知识点归纳总结
物理初二杠杆知识点归纳总结杠杆是物理学中的一个重要概念,它是指由杠杆框架支撑的一个刚性物体。
在物理学中,我们研究了杠杆的原理和应用,下面将对物理初二杠杆相关的知识点进行归纳总结。
一、杠杆的概念杠杆是由支点、力臂和力组成的刚性物体,通过施加与支点垂直方向的力来使它产生转动。
支点是杠杆上的一个点,力臂是力所施加的点到支点之间的距离,力是作用在杠杆上的外力。
二、杠杆的原理1. 杠杆的平衡条件当杠杆处于平衡状态时,力矩的和等于零,即左边力矩之和等于右边力矩之和。
力矩可以通过公式计算:力矩 = 力 ×力臂。
平衡条件为ΣM=0。
2. 杠杆的力臂比力臂是力所施加的点到支点之间的距离,力臂的大小决定了杠杆的机械优势。
力臂越大,杠杆的机械优势越大;力臂越小,杠杆的机械优势越小。
机械优势可以通过力臂比计算:力臂比 = 力臂1 / 力臂2。
三、杠杆的分类1. 一级杠杆一级杠杆是指支点位于力的一侧,力臂和力处于同一直线上。
一级杠杆的特点是力臂比为1:1,即力臂相等,力的方向和大小相同。
2. 二级杠杆二级杠杆是指支点和力不在同一直线上,力矩不为零。
二级杠杆的特点是力臂比不等于1:1,力的方向和大小相同。
3. 三级杠杆三级杠杆是指支点位于力的一侧,力臂和力不处于同一直线上。
三级杠杆的特点是力臂比为1:1,即力臂相等,力的方向和大小相反。
四、杠杆的应用1. 力的放大杠杆能够将小力放大为较大力,通过调整力臂的长度来实现力的放大。
这种原理在诸如螺丝刀、开罐器等工具中得到应用。
2. 节省力量杠杆也可以用来节省力量,通过调整力臂的长度来减小施加力的大小。
这种原理在拔河比赛时使用。
3. 平衡物体杠杆的平衡条件可以用来平衡物体,通过调整施加力的位置和大小来实现物体的平衡。
这种原理在天平和秤杆中得到应用。
五、其他杠杆相关的概念1. 力矩力矩是用来描述力的转动效果的物理量,它等于力对支点产生的力臂乘积,力矩的单位是牛顿·米(Nm)。
物理杠杆知识点总结

物理杠杆知识点总结一、定义物理杠杆是指由一个固定支点连接两个物体,通过施加力矩来实现力的放大或改变方向的简单机械装置。
二、杠杆的分类根据支点位置的不同,杠杆可以分为三类:1. 第一类杠杆:支点位于力的作用方向与杠杆长度之间的一侧,如撬棍。
应用中往往用来改变力的方向,实现力的传递。
2. 第二类杠杆:支点位于力的作用方向与杠杆长度之间的另一侧,如剪刀。
应用中可以实现力的放大,但需要施加较小的力。
3. 第三类杠杆:支点位于力的作用方向与杠杆长度之间的同一侧,如手臂。
应用中可以实现速度的放大,但需要施加较大的力。
三、力矩力矩是杠杆原理的重要概念,它可以用来描述力在杠杆上产生的转动效果。
力矩的大小等于力与支点之间的距离乘以力的大小。
四、力矩的平衡条件杠杆在平衡状态下,力矩的和为零。
即:∑τ = 0其中,∑τ表示所有力矩的代数和。
五、力的放大效应杠杆的一个重要应用是实现力的放大效应。
根据杠杆的原理,当支点到力的作用点的距离增大时,施加的力可以减小,但力矩的大小保持不变。
这样可以通过杠杆的作用,用较小的力实现对较大力的控制。
六、杠杆的应用1. 利用杠杆放大力的作用,可以实现物体的举起、移动等操作。
比如梯子、桌子等日常生活中的物品。
2. 杠杆在工程中的应用非常广泛,如起重机、挖掘机等机械设备都利用了杠杆的原理。
3. 杠杆还可以用于测量质量或力的大小,如天平、测力计等。
七、杠杆的局限性尽管杠杆在很多方面有着广泛的应用,但它也有一些局限性:1. 杠杆的放大效应是有限的,不能无限放大力的大小。
2. 杠杆只能改变力的方向、大小或速度,不能改变能量的大小。
八、杠杆的优势尽管杠杆有一些局限性,但它的优势也是不可忽视的:1. 杠杆结构相对简单,制造成本低,易于维护和操作。
2. 杠杆可以通过合理的设计和安排,实现多种功能,具有很高的灵活性和适应性。
九、杠杆原理的应用杠杆原理不仅仅应用于物理学领域,也应用于其他领域,如经济学中的杠杆效应、心理学中的心理杠杆等。
物理杠杆知识点
物理杠杆知识点
一、物理杠杆知识点
1、物理杠杆是一种由两条支撑杆和一个旋转轴支撑起来的平衡结构,可以使物体间的力量转换,即可以使用小力量来获得大力量。
2、物理杠杆的作用是使物体能够更有效地利用力量。
它可以使物体的力量增大或缩小,使它能够更有效地处理物体的移动任务。
3、物理杠杆的工作原理是利用杠杆的力量来平衡物体的力量,当杠杆的力量大于物体的力量时,物体就会加速而杠杆的力量就会变小,反之物体就会减速而杠杆的力量就会变大。
4、杠杆的两端可以用来夹住物体或者安装附件,使杠杆能够正确支持物体,并能够有效地转换物体的力量。
5、物理杠杆可以调节物体的力量,从而使物体能够更准确地控制物体的移动。
6、物理杠杆的力量和扭矩都可以通过调节杠杆的长度、宽度和齿数来改变,从而获得更多的灵活性。
7、杠杆平衡原理:当悬挂物体的外力相等于杠杆的内力时,杠杆和物体的位置保持不变。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
专题复习 杠杆与简单机械
一、杠杆:定义:在力的作用下绕着固定点转动的硬棒。
1、 五要素——组成杠杆示意图 ①支点②动力③阻力④动力臂,从支点到动力作用线的距离; ⑤阻力臂,从支点到阻力作用线的距离;
2、画力臂方法:⑴ 找支点O ;⑵ 画动力和阻力(实线),如果需要延长力的作用线(虚线); ⑶ 画力臂(虚线,过支点垂直力的作用线作垂线);⑷ 标力臂(大括号)。
3、研究杠杆的平衡条件:杠杆静止或匀速转动;动力×动力臂=阻力×阻力臂;F1l1=F2l2
4、杠杆应用
名称 结 构特 征 特 点 应用举例 省力杠杆 动力臂大于阻力臂 省力、费距离 撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳 费力杠杆 动力臂小于阻力臂 费力、省距离 缝纫机踏板、理发剪刀、钓鱼杆
等臂杠杆 动力臂等于阻力臂 不省力不费力 天平,定滑轮
杠杆平衡问题:
实验注意事项:实验前,应调节杠杆两端的螺母,使杠杆在水平位置平衡。
(杠杆平衡时动力最小问题)
1、某同学在做单臂俯卧撑运动,如图所示。
他的重心在A 点,所受重力为520N ,
他将身体撑起处于平衡状态时,地面对手的支持力为 N 。
2、要使杠杆处于平衡状态,在A 点分别作用的四个力中,最小的是( )
A .F 1
B .F 2
C .F 3
D .F 4
2题图 3题图
3、如图所示是一弯曲的杠杆,O 是支点,OB=CA=4 cm ,OC=3 cm 。
在B 点挂一重物G=10 N ,在A 点加一力,要使杠杆平衡,力F 最小值为多大?
=
12、利用钓鱼竿钓鱼的示意图如图所示,O 为支点,F 1是手对鱼竿的作用力,请
画出:
O
A F F F F O F 1 l 1 l 2 F 2
O
13、怎样调节平衡螺母使杠杆平衡?
1.作用在杠杆上的动力为50N ,阻力为600N,杠杆恰好平衡,则杠杆的动力臂和阻力臂之比为。
(题型四)
2.如图12-24所示,杠杆每小格的长度相等,质量不计,以
O为支点.杠杆的左端挂有物体M,支点右边的A处挂钩
码,杠杆平衡.若将支点移到B点,要使杠杆重新平衡,
在A点应挂个相同的钩码。
(题型三)
3.如图12-25所示,AB为一根质量不计的细棒,用绳在
O处吊起,当A、B两端分别挂两个重物甲、乙时恰
好平衡.若OA=0.8m,OB=0.4m,甲的质量为10
kg,则乙的质量为kg.(题型四)
4.下列工具中,属于省力杠杆的是( )(题型四)
A.夹邮票用的镊子
B.理发师修剪头发用的剪刀
C.剪铁丝用的钢丝钳 D.钓鱼用的鱼竿
5.如图12-26所示的杠杆中,动力的力臂用L表示,图中所画力臂正确的是()
(题型一)
6.在图12-27中画出力F1和F2 的力臂.(题型一)
7.如图12-28,工人师傅用吊车搬运集装箱.集装箱重G =2×104N,支撑杆对吊车臂的支持力为F.在图中画出集装箱所受重力的示意图和支持力F对转动
点O的力臂.
(题型一)
8.工人剪铁皮时,有时用两根铁管套在剪刀柄上(如图
12-29),这是什么道理?(题型四)
9.在研究“杠杆的平衡条件”实验中,有一组同学猜想杠
图12-24
图12-25
图12-26
图12-27
图12-28
图12-29
杆的平衡条件可能是“动力+动力臂=阻力+阻力臂”。
他们经过实验,获得了下述数据:动力F1
/N 动力臂
L1/cm 阻力F2/N 阻力臂L2/cm
4 5 5 4
于是,他们认为自己的猜想得到了验证。
你认为他们的实验过程存在什么问题?
(题型三)
10.图12-30中,OB为轻质杠杆,OA=60cm,AB=20cm。
在杠杆的B端挂一个所受重力为60N的重物,要使杠杆在
水平位置上平衡,在A点加一个多大的竖直向上的拉力?
(题型四)
综合提高训练
1.如图12-31所示,AOB为一轻质杠杆(杠杆自重忽略不计),O为支点,OA=OB,在杠杆的B端挂一重20N的重物,要使杠杆平衡,则在A端施加的力F至少为N。
(题型四)2.人体内也存在三种类型的杠杆,即省力杠杆、费力杠杆和等臂杠杆.跺脚时要靠腓肠肌收缩,骨骼和腓肠肌状况如图12-32所示.踮着的脚可以看作是杠杆(填类型).(题型四)
3.如图12-33所示,重力不计的杠杆OA,O为支点,在拉力F和重力为30N的重物P的作用下,恰在水平位置平衡。
已知OA=80cm,AB=20cm,杠杆与转动轴间的摩擦忽略不计。
那么拉力F的力臂L=________cm,拉力的大小F=_________N。
(题型四)
4.杠杆在我国古代就有了许多巧妙的应用。
护城河上安装使用的吊桥就是一个杠杆,由图
12-34可知它的支点是点(填“A”、B”或“C”),在匀速拉起时,它属于一个______杠杆(填“省力”或“费力”),并在图中画出动力臂L1。
(题型一)
5.如图12-35所示,杠杆AC(刻度均匀,不计杠杆重)可绕支点O自由转动,在B点挂一重为G的物体。
为使杠杆平衡,应在杠杆上的_________点施加一个作用力,才能使作用力最小,该最小作用力与物重G的比值是___________。
(题型四)
6.如图12-36所示的两种情况,OB=AB,物重均为G,两轻质
杠杆均平衡.比较F、F'的大小,满足关系式( )(题型四)
A.F=F’ B.F=2F’
图12-30 图12-31 图12-32 图12-33
图12-34
图12-36
图12-35
C .F =1/2F'
D .F =1/4F'
9.如图12-39所示,AOB 为一杠杆,O 为支点,杠杆重不计,AO =OB 。
在杠杆右端A 处用细绳悬挂重为G 的物体,当AO 段处于水平位置时,
为保持杠杆平衡,需在B 端施加最小的力为F 1;当BO 段在水平位置
时保持杠杆平衡,这时在B 端施加最小的力为F 2,
则( )(题型三)
A .F 1<F 2
B .F 1>F 2
C .F 1=F 2
D .无法比较 10.画出使杠杆AB 在图12-40所示位置静止时所用最小力F 的作用点和方向。
(题型三)
11.如图12-41所示,用一根硬棒撬一个大石块,棒的上端A是动力作用点.(1)在图上
标出:当动力方向向上时,杠杆的支点a当动力方向向下时,杠杆的支点b;(2)在图上画出撬动石块动力F为最小时的方向.(题型三)
12
.某同学用如图12-42所示的装置验证杠杆的平衡条件.调节左边钩码的个数和悬挂位 置,使杠杆水平平衡
时,读出弹簧秤的示数F1=2.61N ,钩码对杠杆的拉力F2=1.96N ;
测得支点O到这两个力作用点的距离OA=25cm ,OB=20cm ,他将所得数据直接代入杠杆平衡条件的公式中,发现Fl·OA和F2·OB并不相等,从而认为杠杆的平衡条件不一定是F1·L 1= F2· L 2这个同学的失误在什么地方?(题型二)
13.在“研究杠杆平衡条件”的实验中
(1)把杠杆挂在支架上,实验前没有挂钩码时,发现杠杆右
端下倾,可将右端螺母向_____边旋转,使杠杆在水平位置平
衡(填“左”或“右”)。
(2)实验中共有6个钩码,杠杆上每格距离相等,调节好杠
杆后,在杠杆左边离支点2格的A 处挂了3个钩码,如图12-43
所示,为使杠杆在水平位置平衡,请你在杠杆右边挂上钩码(用
一种方法).你的方法是_________。
(3)实验中改变支点两侧的钩码位置和个数,用同样的方法
一般要做三次,得到三组数据并进行分析.这样做的目的是________。
(题型二)
14.学校组织同学们到农村参加社会实践活动,小强第一次学习挑担子,他做了以下两次试
验,请你根据各小题后的要求作答。
(1)他先在扁担的两端各挂上50N 的重物,担子很快就被平稳地挑起来。
这时他的肩膀
应放在扁担的什么位置(只要回答,不要分析)?
(2)接着,他又在扁担的A 端加上50N 的重物,如图12-44所
示, 但他掌握不好担子的平衡。
请你用杠杆平衡知识,帮图12-39
图12-40 图12-41
图12-43 图12-44
图图12-42
助他计算出肩膀应距B端多远,担子才能重新水平。