微机原理课程设计 步进电机的正反转及调速控制分解
微机实验报告 步进电机正反转及调速设计

微机原理与接口设计实验报告步进电机正反转及调速设计专业:机械设计制造及其自动化班级:10090112小组成员:周先军 10901239张赓 10901240胡一国 08901312组别: B5摘要:本系统是基于STM8系列单片机的步进电机转速转向控制器。
该系统采用STM8S103F3P6单片机作为主控制器,运用L298全桥驱动器驱动步进电机,通过摇杆、按键控制电机转速,并且通过1602液晶显示器显示当前转速。
该系统中使用的四相步进电机,具有控制精度高,转动扭矩大等特点,实际生产中有广泛的运用。
系统中除了传统按键控制外,还增加遥控控制,单片机通过AD读取摇杆控制信号,实时控制电机转速。
整个系统具有结构简单、可靠性高、成本低和实用性强等特点,具有较高的通用性和应用推广价值。
关键词:四相步进电机 STM8单片机控制 L298驱动电路正反转摇杆控制一、系统方案1.1控制系统方案方案一:采用8086系列单片机。
8086是Inter系列的16位微处理器,数据处理能力强。
但是8086系列的CPU指令数据需要放置在内存中,需要依赖外部非易失存储器和RAM才可以工作,外部电路复杂。
方案二:采用STM8系列单片机。
STM8是意法半导体生产的8位单片机,哈弗结构。
拥有8K字节Flash,1K字节RAM,1K EEPROM,内部集成5路10位ADC,高级控制定时器可带死区控制PWM 、以及SPI 、I2C等接口。
整体性能优越,价格便宜,周边电路简单。
综上对比,选择方案二。
1.2驱动电路方案方案一:采用ULN2003达林顿管阵列控制电机。
ULN2003 是高耐压、大电流复合晶体管阵列,由七个硅NPN 复合晶体管组成,工作电压高,工作电流大,灌电流可达500mA。
但系统采用通用四线四相步进电机,需要两路同时灌、输电流,该驱动设计只能满足5线步进电机的驱动,不符合要求。
方案二;采用L298集成全桥驱动芯片。
L298内部含有4通道逻辑驱动电路,是一种二相和四相电机专业驱动器,内含有两个H桥的高电压大电流双全桥式驱动器,接受标准的TTL逻辑电平信号,可驱动46V、2A以下的电机。
机电一体化设计 步进电机正反转及加减速设计 程序
单片机课机电一体化课程设计题目:步进电机正反转及加减速设计专业:机械工程及自动化班级:机械092姓名:QCR学号:********指导教师:ZZY2012年6月23日目录1.设计目的 (1)2.题目及要求功能分析 (1)3.三相单、双六拍步进电机的结构和工作原理 (1)4. 步进电机的驱动电源 (2)5.设计方案 (3)5.1 整体方案 (3)5.2 具体方案 (4)6.硬件电路的设计 (4)6.1 硬件线路 (5)6.2 工作原理 (5)6.3 操作时序 (6)7. 软件设计 (6)7.1 软件结构 (6)7.2 程序流程 (6)7.3 源程序清单 (6)8. 系统仿真 (6)9. 设计总结 (7)参考文献 (8)附录 (一) (9)附录 (二) (10)附录 (三) (11)步进电机的正反转控制1.设计目的(1)熟练掌握机电一体化原理。
(2)综合运用51单片机的控制电路和最小系统。
(3)步进电机的正反转驱动负载。
2.设计题目及要求功能分析步进电机:步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机可以作为一种控制用的特种电机,利用其精度高等特点,广泛应用于各种工业控制系统中。
3. 三相单、双六拍步进电机的结构和工作原理:三相单、双六拍步进电机通电方式:这种方式的通电顺序是:U -U V-V-VW-W-WU-U或为U-UW-W-WV-V-VU-U。
按前一种顺序通电,即先接通U相定子绕组;接着是U、V两相定子绕组同时通电;断开U相,使V相绕组单独通电;再使V、W两相定子绕组同时通电;W相单独通电;W、U两相同时通电,并依次循环。
微机原理步进电机课程设计

微机原理步进电机课程设计一、课程目标知识目标:1. 让学生掌握微机原理在步进电机控制中的应用,理解步进电机的结构、原理及其特点。
2. 使学生了解步进电机与微控制器之间的接口技术,掌握步进电机的驱动程序编写方法。
3. 让学生掌握步进电机速度和位置控制的基本算法,并运用到实际项目中。
技能目标:1. 培养学生运用微机原理解决实际问题的能力,学会编写和调试步进电机控制程序。
2. 培养学生的动手实践能力,能独立完成步进电机的组装、调试和故障排查。
3. 培养学生团队协作能力,通过分组合作完成课程设计任务。
情感态度价值观目标:1. 激发学生对微机原理和步进电机控制技术的兴趣,培养其探索精神和创新意识。
2. 培养学生严谨、认真的学习态度,养成良好的实验操作习惯。
3. 增强学生的环保意识,关注步进电机在节能环保领域的应用。
本课程针对高年级学生,课程性质为理论与实践相结合。
在分析课程性质、学生特点和教学要求的基础上,将课程目标分解为具体的学习成果。
教学过程中,注重培养学生的实际操作能力和团队协作精神,使学生在完成课程设计任务的过程中,达到知识、技能和情感态度价值观的全面提升。
二、教学内容根据课程目标,教学内容主要包括以下几部分:1. 微机原理基础:回顾微控制器的基本原理,重点讲解微控制器与步进电机的接口技术,涉及课本第3章相关内容。
2. 步进电机原理与结构:介绍步进电机的种类、结构、原理及特点,对应课本第5章内容。
3. 步进电机驱动技术:讲解步进电机的驱动电路设计,包括驱动芯片的选型、接口电路设计等,参考课本第6章相关内容。
4. 步进电机控制算法:学习步进电机的速度和位置控制算法,如PID控制、闭环控制等,结合课本第7章内容。
5. 实践操作:分组进行步进电机的组装、调试及控制程序编写,巩固理论知识,培养实际操作能力。
教学大纲安排如下:第1周:微机原理基础回顾,了解步进电机接口技术;第2周:学习步进电机原理与结构,选型及参数了解;第3周:步进电机驱动技术学习,驱动电路设计;第4周:步进电机控制算法学习,编写控制程序;第5周:实践操作,步进电机组装、调试及故障排查;第6周:课程设计总结,成果展示及评价。
PLC实现步进电机的正反转及调整控制
PLC实现步进电机的正反转及调整控制
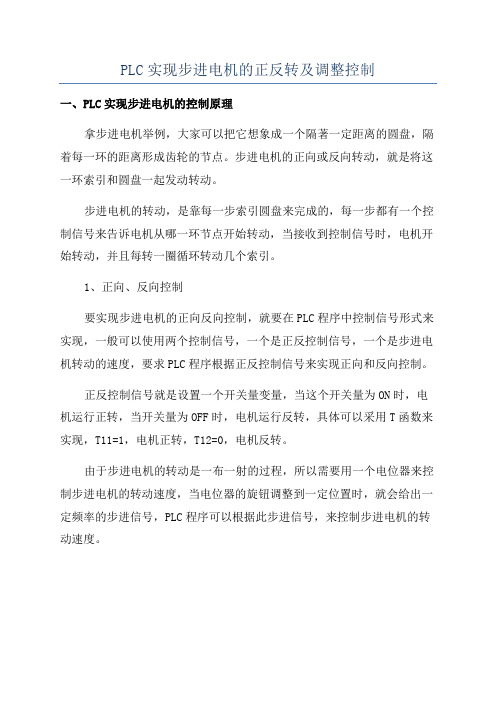
一、PLC实现步进电机的控制原理
拿步进电机举例,大家可以把它想象成一个隔著一定距离的圆盘,隔着每一环的距离形成齿轮的节点。
步进电机的正向或反向转动,就是将这一环索引和圆盘一起发动转动。
步进电机的转动,是靠每一步索引圆盘来完成的,每一步都有一个控制信号来告诉电机从哪一环节点开始转动,当接收到控制信号时,电机开始转动,并且每转一圈循环转动几个索引。
1、正向、反向控制
要实现步进电机的正向反向控制,就要在PLC程序中控制信号形式来实现,一般可以使用两个控制信号,一个是正反控制信号,一个是步进电机转动的速度,要求PLC程序根据正反控制信号来实现正向和反向控制。
正反控制信号就是设置一个开关量变量,当这个开关量为ON时,电机运行正转,当开关量为OFF时,电机运行反转,具体可以采用T函数来实现,T11=1,电机正转,T12=0,电机反转。
由于步进电机的转动是一布一射的过程,所以需要用一个电位器来控制步进电机的转动速度,当电位器的旋钮调整到一定位置时,就会给出一定频率的步进信号,PLC程序可以根据此步进信号,来控制步进电机的转动速度。
单片机(微机)原理课程设计 步进电机正反转 2秒内加减速程序

30转每分钟正转ORG 0000H;起始地址LJMP MAIN;长跳转到mainORG 001BH;定时器1中断入口LJMP ZD;跳转到中断指令ORG 002FH;随便给一个数MAIN: MOV SP,#6FH;给堆栈赋地址MOV SCON,#00H;串口工作于方式0MOV TMOD,#15H;定时器1工作于方式1,计数器0工作于方式1MOV TH0,#00H;计数器的高8位为零MOV TL0,#00H;计数器的低8位为零MOV TH1,#3CH;即十位数的60MOV TL1,#0B0H;即十位数的176,定时器1赋初值,3CB0H的值为15536,65536-15536=50000,一个机器周期为1us,十六进制为3CB0;定时50ms,计数器0计数MOV R7,#20;循环计数20次共定时1sMOV P1,#00H;以正传为例MOV 30H,#01HMOV 31H,#02HMOV 32H,#04HMOV 33H,#08HMOV 34H,#08HMOV 35H,#04HMOV 36H,#02HMOV 37H,#01HSETB EA;允许中断SETB ET1;允许定时器/计数器1中断SETB TR1;启动定时器1SETB TR0;启动计数器0START: MOV R0,#30HMOV R6,#4LOOP1: MOV A,@R0MOV P1,ALCALL DELAYINC R0DJNZ R6,LOOP1SJMP STARTZD: MOV TH1,#3CHMOV TL1,#0B0HDJNZ R7,HHMOV A,TL0MOV TL0,#00HMOV B,#5MUL ABMOV B,#3DIV AB;计算转速,存于A中LCALL BCDLCALL DISPLAYMOV R7,#20HH: RETIDELAY: MOV R5,#50;150000/(50*100)=30r/minDE1: MOV R4,#100DE2: DJNZ R4,DE2DJNZ R5,DE1RETBCD: MOV B,#100DIV ABMOV 78H,AMOV A,#10XCH A,BDIV ABMOV 79H,AMOV 7AH,BRETDISPLAY:MOV R3,#3MOV R1,#7AHMOV DPTR,#TABLELOOP3: MOV A,@R1MOVC A,@A+DPTRMOV SBUF,ADEC R1LOOP4: JNB TI,LOOP4CLR TIDJNZ R3,LOOP3RETTABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH 30转每分钟反转反转只需把START子程序中第一句话的#30H改为#34H即可2秒内加减速ORG 0000H;起始地址LJMP MAIN;长跳转到mainORG 001BH;定时器1中断入口LJMP ZD;跳转到中断指令ORG 002FH;随便给一个数MAIN: MOV SP,#6FH;给堆栈赋地址MOV R2,#2MOV SCON,#00H;串口工作于方式0MOV TMOD,#15H;定时器1工作于方式1,计数器0工作于方式1MOV TH0,#00H;计数器的高8位为零MOV TL0,#00H;计数器的低8位为零MOV TH1,#3CH;即十位数的60MOV TL1,#0B0H;即十位数的176,定时器1赋初值,3CB0H的值为15536,65536-15536=50000,一个机器周期为1us,十六进制为3CB0;定时50ms,计数器0计数MOV R7,#20;循环计数20次共定时1sMOV P1,#00H;以正传为例MOV 30H,#01HMOV 31H,#02HMOV 32H,#04HMOV 33H,#08HMOV 34H,#08HMOV 35H,#04HMOV 36H,#02HMOV 37H,#01HSETB EA;允许中断SETB ET1;允许定时器/计数器1中断SETB TR1;启动定时器1SETB TR0;启动计数器0START: MOV R0,#30HMOV R6,#4LOOP1: MOV A,@R0MOV P1,ALCALL DELAYINC R0DJNZ R6,LOOP1SJMP STARTZD: MOV TH1,#3CHMOV TL1,#0B0HDJNZ R7,HHMOV A,TL0MOV TL0,#00HMOV B,#5MUL ABMOV B,#3DIV AB;计算转速,存于A中LCALL BCDLCALL DISPLAYMOV R7,#20DJNZ R2,HHMOV R2,#1HH: RETIDELAY: MOV R5,#200MOV A,#2SUBB A,R2MOV B,#180MUL ABMOV R5,AMOV A,#200SUBB A,R5MOV R5,ADE1: MOV R4,#100DE2: DJNZ R4,DE2DJNZ R5,DE1RETBCD: MOV B,#100DIV ABMOV 78H,AMOV A,#10XCH A,BDIV ABMOV 79H,AMOV 7AH,BRETDISPLAY:MOV R3,#3MOV R1,#7AHMOV DPTR,#TABLELOOP3: MOV A,@R1MOVC A,@A+DPTRMOV SBUF,ADEC R1LOOP4: JNB TI,LOOP4CLR TIDJNZ R3,LOOP3RETTABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH。
步进电机正反转和调速控制中功能指令的应用
三菱FX2N系列PLC功能指令的应用
步进电机正反转和调速控制中功能指令的应用 五、部分功能指令
1、数据变换指令 BCD/BIN BCD变换指令的编号为FNC18。它是将源元件中的二进制数转换成BCD码 送到目标元件中,如图。如果指令进行16位操作时,执行结果超出0~9999 范围将会出错;当指令进行32位操作时,执行结果超过0~99999999范围也 将出错。
1、控制要求 以三相六拍步进电动机为例,要求PLC产生脉冲序列,作为步进 电动机驱动电源功放电路的输入。脉冲正序列为A-AB-B-BC-C-CA,脉 冲反序列CA-C-BC-B-AB-A。
2021/8/7
三菱FX2N系列PLC功能指令的应用
步进电机正反转和调速控制中功能指令的应用
2、PLC的I/O分配表:
(1)单三拍工作方式:三相步进电动如果按A-B-C-A方式循环通电工作, 就称这种工作方式为单三拍工作方式。
(2)双三拍工作方式:每次对两相同时三拍”,转子转动一个齿距角。
(3)三相六拍工作方式:即以一相和两相相间隔轮流通电的方式运行, 如A-AB-B-BC-C-CA。 2021/8/7
输入 总开关 手动/自动 单步按钮 反转按钮
输出
X0
A相功放电路
X1
B相功放电路
X2
C相功放电路
X3
3、接线图:
Y0 Y1 Y2
减速按钮
X4
加速按钮
X5
2021/8/7
三菱FX2N系列PLC功能指令的应用
步进电机正反转和调速控制中功能指令的应用 3、梯形图及程序分析 参阅配套课本
2021/8/7
电气控制与PLC技术
电气控制与PLC技术
步进电机正反转及调速设计

步进电机正反转及调速设计陈超渭南师范学院物理与电气工程系2008级电气(1)班摘要:本系统用52系列单片机和LY-36电机驱动芯片并加入了按钮来控制步进电机实现转向、转速等。
系统中使用的四相步进电机,相应的驱动和控制电路对于其整体性能起着非常重要的作用。
经系统调试,能够很好的控制步进电机的正反转、加减速,从而达到预期目的。
整个系统具有结构简单、可靠性高、成本低和实用性强等特点,具有较高的通用性和应用推广价值。
关键词:四相步进电机 52单片机控制 YL-36驱动电路正反转1 绪论1.1 概述步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化系统中,与其他类型的电机相比具有易于精确控制,无累积误差等优点。
步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,就驱动步进电机按设定的方向转一个固定的角度,它的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机可以作为一种控制用的特种电机,利用其没有累积误差的特点,广泛应用于各种开环控制。
单片机又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上,用它来做一些控制电器一类不是很复杂的工作[1]。
单片机内部也用和电脑功能类似的模块,比如CPU,内存,并行总线,还有和硬盘作用相同的存储器件。
本文设计一种用STC89C52作为核心部件进行逻辑控制及信号产生的步进电机控制系统。
为使步进电机系统的可靠性、通用性、可维护性以及性价比最优,根据系统的功能要求,通过单片机存储器、I/O口、中断、键盘、LED显示器的扩展来实现步进电机的启停、正反转、加减速等功能。
1.2 步进电机及单片机的发展趋势步进电机的发展,将依赖于新型材料的应用、设计手段,以及与驱动技术的最佳匹配。
随着自动控制技术、计算机网络通信技术在众多领域中的快速发展,以及进一步数字化、智能化,步进电机将会在更深入广泛的领域中得意应用。
微机原理及接口技术课程设计(步进电机)

三、硬件系统的基本原理:
1、系统硬件子系统的构成:
本设计采用的步进电机为35BYJ46型四相八拍电机,电压为DC12V,其励磁线圈及其励磁顺序如下图及下表所示:
1
2
3
4
5
6
7
8
5
+
+
+
+
+
+
+
+
4
-
-
3
-
-
-
2
-
-
-
1
-
-
-பைடு நூலகம்
2、步进电机控制原理:
接线图:
B4区8255的PC0、PC1、PC2、PC3分别接E1区步进电机的A、B、C、D;
DEC BX
DECDX
JZ M1
LOOPA5
JMPM2
M2:MOV BX,OFFSET TAB
MOVAX,0007H
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计报告题目步进电机正反转及调速控制系统的设计课程名称微机原理及应用院部名称机电工程学院专业电气工程及其自动化班级10电气1班学生姓名管志成学号1004103027课程设计地点C304课程设计学时20指导教师李国利金陵科技学院教务处制步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件,具有快速启动能力,定位精度高,能够直接接受数字量,因此被广泛地应用于数字控制系统中,如数模转换装置、精确定位、计算机外围设备等,在现代控制领域起着非常重要的作用。
本设计基于Proteus 7.8设计环境,运用了8086 CPU芯片以及74273芯片、74244芯片和步进电机以及7位小功率驱动芯片ULN2003A、按钮、指示灯等辅助硬件电路,设计了步进电机正反转及调速系统。
绘制软件流程图,进行了软件设计并编写了源程序,最后对软硬件系统进行联合调试。
该步进电机的正反转及调速系统具有控制步进电机正反转的功能,还可以对步进电机进行调速,不同的按钮对应不同的速度,并且在没有速度按钮按下的时候,步进电机自动切换到停止状态。
关键词:步进电机;正反转;调速控制;ULN2003A芯片;8086微机系统一、概述1.1 课程设计的目的 (4)1.2课程设计的要求 (4)二、总体设计方案及说明2.1 系统总体设计方案 (5)2.2系统工作框图 (5)三、系统硬件电路设计3.1 Intel 8086 微处理器的简介 (6)3.2 步进电机的原理 (7)3.3 ULN2003A的简介 (8)3.4 74154芯片简介 (9)3.5 74LS273芯片简介 (10)3.6 8086最小系统的设计 (11)3.7 步进电机及其驱动电路的设计 (12)3.8 电机状态显示电路的设计 (12)3.9 输入采样电路的设计 (13)3.10系统总电路图 (14)四、系统软件部分设计4.1 系统流程图 (15)4.2 系统软件源程序 (16)4.2.1电机绕组通电顺序设定 (16)4.2.2 延时子程序设计 (16)4.2.3 汇编源程序及说明 (16)五、总结5.1 系统软硬件的联合调试 (21)5.2 问题分析和解决方案 (23)5.3 心得与体会 (23)六、参考文献 (23)附录:总电路图 (25)一、概述1.1 课程设计的目的通过本课程设计,使学生掌握控制系统设计的一般步骤,掌握系统总体控制方案的设计方法。
使学生进一步掌握微型计算机应用系统的硬、软件开发方法,输入/输出(I/O)接口技术,应用程序设计技术,并能结合专业设计简单实用的微型计算机应用系统。
针对课堂重点讲授内容使学生加深对微型计算机硬件原理的理解及提高汇编语言程序设计的能力,为以后的毕业设计搭建了微机系统应用平台,提高学生的开发创新能力。
1.2课程设计的要求步进电动机正反转控制系统的设计设计一个步进电动机正反转控制系统,要求:1)系统功能:点动SW1按键控制步进电动机正转,点动SW2按键控制步进电动机反转,点动SW3按键控制步进电动机停止,在进行相应操作时,对应LED 将被点亮。
按下SW4按键使步进电机在所设定的一级速度下运转,按下SW5使步进电机在所设定的二级速度下运转,按下SW6使步进电机在设定的三级速度下运转,按下SW7使步进电机在满转速下运转;2)给出系统设计方案,画出硬件连线图,并说明工作原理;3)画出程序框图并编写程序;4)软硬件联调,完成系统工作调试;在以上工作基础上完成课程设计报告,包括设计任务与要求,总体方案说明,电路原理图与说明,软件流程图和源程序清单,问题分析与解决方案,结论与体会,参考资料等。
二、总体设计方案与说明2.1 系统总体设计方案本设计是基于Windows环境下的Proteus7.8软件,在其中进行硬件电路的的设计,汇编语言源程序的编写以及以上两部分工作完成后的软硬件系统的联合调试。
本设计的处理控制系统由Intel 8086微处理器在最小模式下组成的单处理器系统构成,用来进行对外围硬件电路进行信息采集、数据处理和控制。
由8086芯片来检测外围电路中正反转按键是否按下,若按下,则相应地改变对步进电机的施加的脉冲顺序,实现正转和反转的控制,没有键按下则电机处于停止状态;同样由8086处理器来检测外围电路中的调速按钮是否按下,若有键按下,则调用相应的时间的延时子程序,以对脉冲频率进行控制以实现对步进电机速度的调节。
显示电路采用LED指示灯来指示电机的运行状态驱动电路采用ULN2003A芯片,该芯片的电流增益高,带负载能力强。
步进电机采用35BY48S03四相步进电机,电压为DC12V,额定转速为360RPM。
2.2系统工作框图图1 系统工作框图三、系统硬件部分设计3.1 Intel 8086 微处理器的简介Intel 8086是Intel公司于1978年推出的16位微处理器。
它采用HMOS工艺制造,片内有2.9万个晶体管,单一电源+5V供电,时钟频率4.77-10MHz,片内数据总线、寄存器和外部数据总线都为16位,最大可寻址的物理地址为1M。
要掌握一个CPU的工作性能及使用方法,首先应该了解它的编程结构。
在8086CPU的编程结构上,从功能上,分为两部分,即总线接口部件(BIU)和执行部件(EU)。
8086的逻辑地址为20位,物理地址为16位,,对于编程员来说,只需要考虑逻辑地址即可。
8086为40只引脚双列直插式封装。
Intel 8086 可以工作在最大和最小两种模式下,最小模式和最大模式的确定是通过一条MN/MN所接的逻辑电平是“1”还是“0”来完成。
在最小方式下,微处理器被用来构成一个小规模的单处理机系统,微处理器本身必须提供全部的的控制信号给外围电路。
在最大方式下,微处理器被用来构成一个较大规模的多机系统。
在最小模式下的信号如下:(1)AD15~AD0(address data bus)地址/数据复用引脚(双向工作)分时复用的地址/数据线。
(2)A19/S6~A16/S3(Address/Status)输出,是分时复用的地址/状态线。
用作地址线时,A19~A16与A15~A0一起构成访问存储器的20位物理地址。
(3)BHE/ S7 (Bus High Enabale/Status)总线高字节有效信号。
三态输出,低电平有效,用来表示当前高8 位数据线上的数据有效。
(4)NMI(Non Maskable Interrupt Request)不可屏蔽中断请求信号。
由外部输入,上升沿触发,不受中断允许标志的限制。
(5)INTR(Interrupt Request)可屏蔽中断请求信号。
由外部输入,电平触发,高电平有效。
(6)RD(Read)读信号。
三态输出,低电平有效,表示当前CPU正在读存储器或IO端口。
(7) CLK(Clock)主时钟引脚(输入)。
由8284时钟发生器输入。
8286CPU可使用的最高时钟频率随芯片型号不同而异,8086为5MHz,8086-1为10MHz,8086-2 为8MHz。
(8) RESET(reset)复位信号。
由外部输入,高电平有效。
(9) READY(ready)准备就绪信号。
由外部输入,高电平有效,表示CPU 访问的存储器或IO端口已准备好传送数据。
(10) TEST 测试信号。
由外部输入,低电平有效。
CPU 执行WAIT 指令时,每隔5 个时钟周期对TEST 进行一次测试,若测试TEST 无效,则CPU 处于踏步等待状态,直到TEST有效,CPU才继续执行下一条指令。
(11) MN/MX 工作模式选择信号。
由外部输入,MN/MX 为高电平时,CPU 工作在最小模式;MN/MX为低电平时,CPU工作在最大模式。
(12) GND/VCC电源地和电源。
8086CPU只需要单一的+5V电源,由VCC引脚输入。
(13) INTA 中断响应信号。
向外部输出,低电平有效。
在中断响应周期,该信号表示CPU响应外部发来的INTR信号,用作读中断类型码的选通信号。
(14) ALE 地址锁存允许信号。
向外部输出,高电平有效。
在最小模式系统中用作地址锁存器的片选信号。
(15) DEN数据允许信号,三态输出,低电平有效。
(16) DT/R 数据发送/接收控制信号(17) M/IO 存储器/IO 端口访问信号。
(18) WR写信号。
三态输出,低电平有效,表示当前CPU正在写存储器或IO 端口。
(19) HOLD总线请求信号。
由外部输入、高电平有效。
表示有其他共享总线的处理器/控制器向CPU请求使用总线。
(20) HLDA 总线请求响应信号。
向外部输出,高电平有效。
CPU 一旦测试到有HOLD 请求,就在当前总线周期结束后,使HLDA有效,表示响应这一总线请求,并立即让出总线使用权。
在不要求使用总线的情况下,CPU中指令执行部件可继续工作。
HOLD变为无效后,CPU也将HLDA置成无效,并收回对总线的使用权,继续操作。
3.2 步进电机的原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
本设计采用35BY48S03四相八拍型步进电机,电压为DC12V,额定转速为360RPM。
步进电机的工作原理示意图如下:图2 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D 方向转动。
在本设计中,我们使用四相八拍的运行方式,即控制正转时,电机绕组的通电顺序为:AD-D-DC-C-CB-B-BA-A;反转时,电机绕组的通电顺序为A-AB-B-BC-C-CD-D-DA。
3.3 ULN2003A的简介ULN2003A是一个7路反向器电路,即当输入端为高电平时ULN2003A输出端为低电平,当输入端为低电平时ULN2003A输出端为高电平。
图3 ULN2003A由于集成电路集驱动和保护于一体,作为小功率步进电机的专用驱动芯片,ULN2003A 是该高耐压、大电流达林顿陈列,由7个硅NPN 达林顿管组成。