泊车用超声波测距仪的研制
超声波测距技术在智能停车场系统中的应用
超声波测距技术在智能停车场系统中的应用随着城市化进程加速,越来越多的车辆走上了路面,这也带来了日益复杂的交通问题。
在城市中,停车问题一直是一个头疼的事情。
由于限制空间的限制和管理不善,造成了停车难、车位紧张和交通堵塞等问题。
因此,智能停车场系统已经成为一个热门话题,而超声波测距技术也成为了实现这一目标的关键技术之一。
一、超声波测距技术的原理超声波是频率高于20KHz的声波。
超声波测距是一种利用超声波的反射时间测量距离的方法。
超声波是由超声波发生器产生的,并沿着测试对象送出。
当声波遇到对象并发生反射时,它会重新返回检测器。
这个侦听器的工作就是测量声波发射和收听之间的时间,并通过乘以声波传播的速度来计算对象与测量器之间的距离。
二、超声波测距技术在智能停车场系统中的应用1.车位感应超声波传感器可以被安装在车位顶部,以测量车位的占用情况。
当车辆停入车位时,车位顶部的信号就会发生改变。
这个变化会被超声波传感器检测到,并反映到停车场的智能管理系统上。
当一个车位被占用时,系统会自动显示这个车位已被占用,以此来告知其他驾车者有无空余车位。
2.导航设施超声波传感器还可以被用来标记车位的物理范围,并帮助司机朝着停车位直接行驶。
由于超声波传感器的检测范围很广,可以检测到车位周边的任何物体,因此它可以帮助司机避免碰撞或其他情况,以保证停车的顺畅。
3.计算空位超声波传感器还可以利用数学计算来计算空余车位的数量,并将这些信息报告给停车场管理人员。
这样一来,管理员就可以根据车位的占用情况调整车位数量和位置,以更好的优化整个停车场的使用情况。
4.智能付款通过配置超声波传感器和智能支付系统,用户可以轻松地完成停车付款。
当车主准备离开时,超声波传感器可以确定他们停车的时间和停留时长,并自动计算停车位使用费用,并将这些费用使用智能支付方式付款,避免了许多传统停车场的人工付款问题。
三、案例目前,各种类型的超声波测距设备都被广泛应用在停车场场所。
基于超声波倒车测距仪设计
1.主程序流程框图
开始 初始化 发射超声波 启动定时
开中断
Testok=1?
N Y
显示OFF
计算距离
距离<设定 值 Y 开报警 关报警 N
显示距离
2.超声波接收中断程序及T0中断子程序
关定时器T0
屏蔽外部中断
屏蔽T0中断
屏蔽定时器中断
关外部中断
关定时器
Testok=1
Testok=2
返回
返回
超声波接收中断子程序
按键 扫描 模块
运算 结果 处理 模块
声光 报警 模块
声光报警模块:当所测距离小 按键扫描模块: 发射接收控制模块:发射控制模块是软件控制超 数码管显示模块:能够让所测得的距离 系统初始化模块:即系统刚通电的时候对系统的 于某值时,通过声光报警来提 通过键盘控制倒 声波发射电路发射超声脉冲启动定时器工作,同 显示在数码管上。 运算结果处理模块:运算结果处理模块将多次所测得时间进行 各个引脚的电平分配和对各寄存器的赋初值。 醒驾驶员。 车雷达的工作。 时启动接收电路工作,当接收电路有信号输入时, 处理,进行软件取值工作,根据公式计算出距离,然后再对计 对输入信号进行处理。 算出的结果进行修正处理,将处理后的数据送至数码显示模块。
二、超声波及超声波测距原理
1.超声波
超声波是一种振动频率高于声波的机械波,由换能晶片 在电压的激励下发生振动产生的,它具有频率高、波长短、 绕射现象小,特别是方向性好、能够成为射线而定向传播等 特点。 在医学、军事、工业、农业上有很多的应用。超声波因 其频率下限大约等于人的听觉上限而得名。
三、总体设计方案
超声波倒车测距仪的构造和组成,是单片机、发射模块、
汽车超声波雷达辅助泊车系统开发
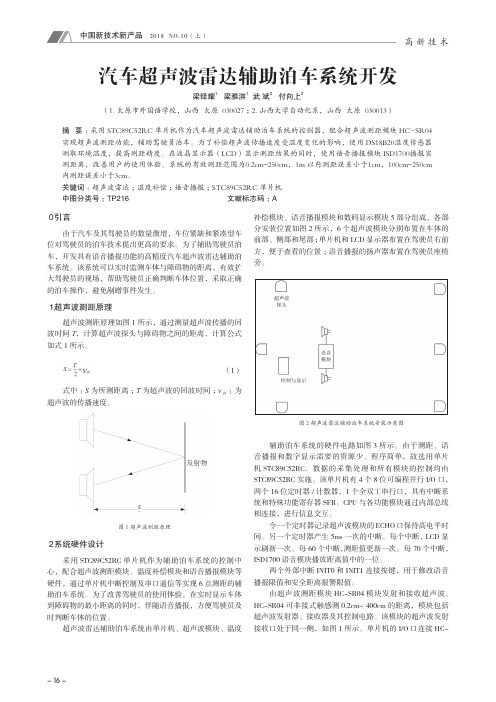
图 3 硬件电路
SR04 的控制端 Trig 口,给 Trig 一个至少 10μs 的高电平触发 SS)。在 SPI 模式下,用户可以对任意存储地址进行录放,故
测距,HC-SR04 模块自动发射 8 个 40kHz 的方波,并自动检 逐个在地址内录入“0”、“1”、“2”、“3”、“4”、“5”、“6”、
令一个定时器记录超声波模块的 ECHO 口保持高电平时 间。另一个定时器产生 5ms 一次的中断。每个中断,LCD 显 示刷新一次。每 60 个中断,测距值更新一次。每 70 个中断, ISD1700 语音模块播放距离值中的一位。
两个外部中断 INIT0 和 INIT1 连接按键,用于修改语音 播报限值和安全距离报警限值。
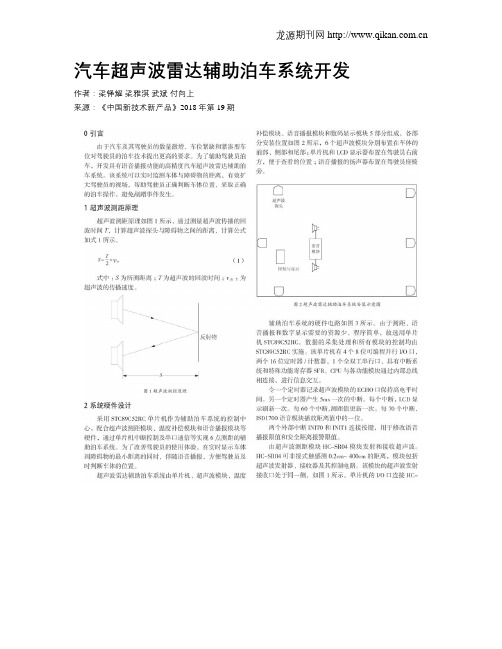
1 超声波测距原理
超声波测距原理如图 1 所示,通过测量超声波传播的回 波时间 T,计算超声波探头与障碍物之间的距离,计算公式 如式 1 所示。
补偿模块、语音播报模块和数码显示模块 5 部分组成,各部 分安装位置如图 2 所示,6 个超声波模块分别布置在车体的 前部、侧部和尾部;单片机和 LCD 显示器布置在驾驶员右前 方,便于查看的位置 ;语音播报的扬声器布置在驾驶员座椅 旁。
内测距误差小于3cm。
关键词 :超声波雷达 ;温度补偿 ;语音播报 ;STC89C52RC 单片机
中图分类号 :TP216
文献标志码 :A
0 引言
由于汽车及其驾驶员的数量激增,车位紧缺和紧凑型车 位对驾驶员的泊车技术提出更高的要求。为了辅助驾驶员泊 车,开发具有语音播报功能的高精度汽车超声波雷达辅助泊 车系统。该系统可以实时监测车体与障碍物的距离,有效扩 大驾驶员的视场,帮助驾驶员正确判断车体位置,采取正确 的泊车操作,避免剐蹭事件发生。
超声波测距仪制作方案
超声波测距仪制作方案该测距仪采用NE555电路、两级级放大电路和电平比较电路实现了超声波的发射与接收。
比较器为该测距仪的核心单元,实现发射电路的控制和接收数据的处理。
本系统具有很强的实用价值和良好的市场前景。
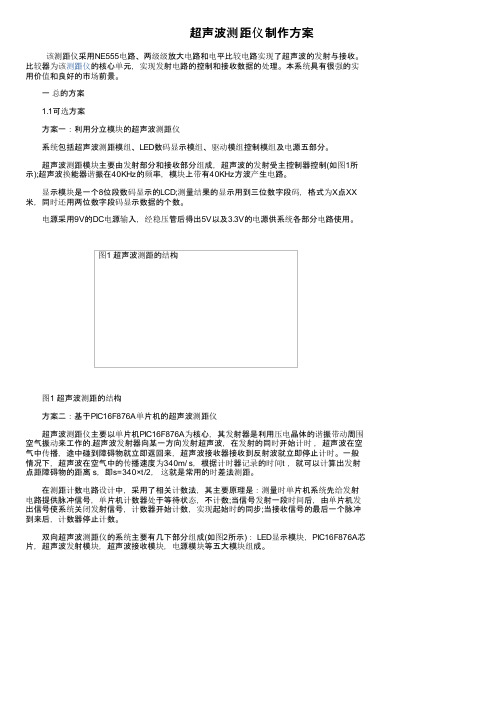
一总的方案 1.1可选方案 方案一:利用分立模块的超声波测距仪 系统包括超声波测距模组、LED数码显示模组、驱动模组控制模组及电源五部分。
超声波测距模块主要由发射部分和接收部分组成,超声波的发射受主控制器控制(如图1所示);超声波换能器谐振在40KHz的频率,模块上带有40KHz方波产生电路。
显示模块是一个8位段数码显示的LCD;测量结果的显示用到三位数字段码,格式为X点XX 米,同时还用两位数字段码显示数据的个数。
电源采用9V的DC电源输入,经稳压管后得出5V以及3.3V的电源供系统各部分电路使用。
图1 超声波测距的结构 图1 超声波测距的结构 方案二:基于PIC16F876A单片机的超声波测距仪 超声波测距仪主要以单片机PIC16F876A为核心,其发射器是利用压电晶体的谐振带动周围空气振动来工作的.超声波发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器接收到反射波就立即停止计时。
一般情况下,超声波在空气中的传播速度为340m/ s,根据计时器记录的时间t ,就可以计算出发射点距障碍物的距离 s,即s=340×t/2,这就是常用的时差法测距。
在测距计数电路设计中,采用了相关计数法,其主要原理是:测量时单片机系统先给发射电路提供脉冲信号,单片机计数器处于等待状态,不计数;当信号发射一段时间后,由单片机发出信号使系统关闭发射信号,计数器开始计数,实现起始时的同步;当接收信号的最后一个脉冲到来后,计数器停止计数。
双向超声波测距仪的系统主要有几下部分组成(如图2所示): LED显示模块,PIC16F876A芯片,超声波发射模块,超声波接收模块,电源模块等五大模块组成。
超声波测距仪的研制

收稿日期:2003201220 作者简介:胡萍(19682),女,江西进贤人,江西省计算技术研究所助理研究员,研究方向:计算机控制。
文章编号:100622475(2003)1020054203超声波测距仪的研制胡 萍(江西省计算技术研究所,江西南昌 330002)摘要:主要介绍微电脑超声测距仪的工作原理。
系统由AT 89C2051单片机、超声波发射电路、超声波接收放大电路、环境温度采集电路及显示电路组成。
该超声波测距仪具有集成度高、反应速度快、测量精度高、性能价格比高等特点。
关键词:单片机;超声波;测距仪中图分类号:TP274+.53 文献标识码:AStudy of H igh Precision U ltrasonic R ange FinderH U Ping(Jiangxi Institute of C om puting T echnology ,Nanchang 330002,China )Abstract :This paper describes the principle of microprocess or ultras onic range finder.The system consists of single chip AT 89C2051,ul 2tras onic transmitter circuit ,ultras onic receiver circuit ,tem perature collection circuit ,and display circuit.The ultras onic range finder is of high integration ,high 2speed reaction ,high measure precision ,and high rate of per formance and price.K ey w ords :single chip ;ultras onic ;range finder0 引 言超声波是由机械振动产生的,可在不同介质中以不同的速度传播。
车用超声波测距系统设计与应用
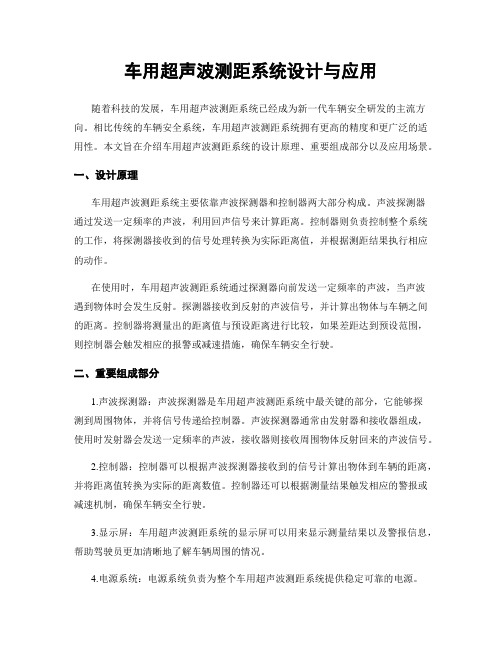
车用超声波测距系统设计与应用随着科技的发展,车用超声波测距系统已经成为新一代车辆安全研发的主流方向。
相比传统的车辆安全系统,车用超声波测距系统拥有更高的精度和更广泛的适用性。
本文旨在介绍车用超声波测距系统的设计原理、重要组成部分以及应用场景。
一、设计原理车用超声波测距系统主要依靠声波探测器和控制器两大部分构成。
声波探测器通过发送一定频率的声波,利用回声信号来计算距离。
控制器则负责控制整个系统的工作,将探测器接收到的信号处理转换为实际距离值,并根据测距结果执行相应的动作。
在使用时,车用超声波测距系统通过探测器向前发送一定频率的声波,当声波遇到物体时会发生反射。
探测器接收到反射的声波信号,并计算出物体与车辆之间的距离。
控制器将测量出的距离值与预设距离进行比较,如果差距达到预设范围,则控制器会触发相应的报警或减速措施,确保车辆安全行驶。
二、重要组成部分1.声波探测器:声波探测器是车用超声波测距系统中最关键的部分,它能够探测到周围物体,并将信号传递给控制器。
声波探测器通常由发射器和接收器组成,使用时发射器会发送一定频率的声波,接收器则接收周围物体反射回来的声波信号。
2.控制器:控制器可以根据声波探测器接收到的信号计算出物体到车辆的距离,并将距离值转换为实际的距离数值。
控制器还可以根据测量结果触发相应的警报或减速机制,确保车辆安全行驶。
3.显示屏:车用超声波测距系统的显示屏可以用来显示测量结果以及警报信息,帮助驾驶员更加清晰地了解车辆周围的情况。
4.电源系统:电源系统负责为整个车用超声波测距系统提供稳定可靠的电源。
三、应用场景车用超声波测距系统的应用场景非常广泛,可以用于车辆的前、后、左、右四个方向的监测。
以下是车用超声波测距系统的几种常见应用场景:1.倒车雷达:倒车雷达是车用超声波测距系统最为常见的应用场景之一。
在倒车过程中,探测器会向后发送声波,并根据接收到的反射信号计算出距离,从而帮助驾驶员更加精准地掌握车辆距离障碍物的距离。
基于超声波车位探测系统的自动泊车方法研究
基于超声波车位探测系统的自动泊车方法
研究
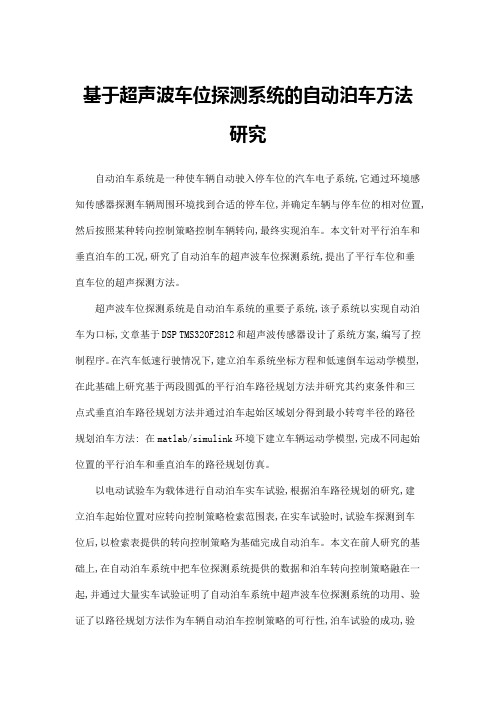
自动泊车系统是一种使车辆自动驶入停车位的汽车电子系统,它通过环境感知传感器探测车辆周围环境找到合适的停车位,并确定车辆与停车位的相对位置,然后按照某种转向控制策略控制车辆转向,最终实现泊车。
本文针对平行泊车和垂直泊车的工况,研究了自动泊车的超声波车位探测系统,提出了平行车位和垂直车位的超声探测方法。
超声波车位探测系统是自动泊车系统的重要子系统,该子系统以实现自动泊车为口标,文章基于DSP TMS320F2812和超声波传感器设计了系统方案,编写了控制程序。
在汽车低速行驶情况下,建立泊车系统坐标方程和低速倒车运动学模型,在此基础上研究基于两段圆弧的平行泊车路径规划方法并研究其约束条件和三点式垂直泊车路径规划方法并通过泊车起始区域划分得到最小转弯半径的路径规划泊车方法: 在matlab/simulink环境下建立车辆运动学模型,完成不同起始位置的平行泊车和垂直泊车的路径规划仿真。
以电动试验车为载体进行自动泊车实车试验,根据泊车路径规划的研究,建立泊车起始位置对应转向控制策略检索范围表,在实车试验时,试验车探测到车位后,以检索表提供的转向控制策略为基础完成自动泊车。
本文在前人研究的基础上,在自动泊车系统中把车位探测系统提供的数据和泊车转向控制策略融在一起,并通过大量实车试验证明了自动泊车系统中超声波车位探测系统的功用、验证了以路径规划方法作为车辆自动泊车控制策略的可行性,泊车试验的成功,验
证了转向控制策略的有效性。
汽车超声波雷达辅助泊车系统开发
汽车超声波雷达辅助泊车系统开发作者:梁铎耀梁雅淇武斌付向上来源:《中国新技术新产品》2018年第19期摘; 要:采用STC89C52RC单片机作为汽车超声波雷达辅助泊车系统的控制器,配合超声波测距模块HC-SR04实现超声波测距功能,辅助驾驶员泊车。
为了补偿超声波传播速度受温度变化的影响,使用DS18B20温度传感器测取环境温度,提高测距精度。
在液晶显示器(LCD)显示测距结果的同时,使用语音播报模块ISD1700播报实测距离,改善用户的使用体验。
系统的有效测距范围为0.2cm~250cm,1m以内测距误差小于1cm,100cm~250cm内测距误差小于3cm。
关键词:超声波雷达;温度补偿;语音播报;STC89C52RC单片机中图分类号:TP216; ; ; ; 文献标志码:A0 引言由于汽车及其驾驶员的数量激增,车位紧缺和紧凑型车位对驾驶员的泊车技术提出更高的要求。
为了辅助驾驶员泊车,开发具有语音播报功能的高精度汽车超声波雷达辅助泊车系统。
该系统可以实时监测车体与障碍物的距离,有效扩大驾驶员的视场,帮助驾驶员正确判断车体位置,采取正确的泊车操作,避免剐蹭事件发生。
1 超声波测距原理超声波测距原理如图1所示,通过测量超声波传播的回波时间T,计算超声波探头与障碍物之间的距离,计算公式如式1所示。
(1)式中:S为所测距离;T为超声波的回波时间;v声:为超声波的传播速度。
图1 超声波测距原理2 系统硬件设计采用STC89C52RC单片机作为辅助泊车系统的控制中心,配合超声波测距模块、温度补偿模块和语音播报模块等硬件,通过单片机中断控制及串口通信等实现6点测距的辅助泊车系统。
为了改善驾驶员的使用体验,在实时显示车体到障碍物的最小距离的同时,伴随语音播报,方便驾驶员及时判断车体的位置。
超声波雷达辅助泊车系统由单片机、超声波模块、温度补償模块、语音播报模块和数码显示模块5部分组成,各部分安装位置如图2所示,6个超声波模块分别布置在车体的前部、侧部和尾部;单片机和LCD显示器布置在驾驶员右前方,便于查看的位置;语音播报的扬声器布置在驾驶员座椅旁。