无人飞艇系统仿真研究
飞艇目标跟踪制导研究与仿真
飞艇目标跟踪制导研究与仿真导航、制导、控制(GNC)技术是飞控系统的核心技术。
三个环节分别解决了”在哪儿”、”去哪儿”、”怎么去”的问题。
本文详细介绍了制导律设计的问题,并根据某飞艇模型进行了仿真。
标签:制导率、目标跟踪、飞艇、仿真0 引言GNC技术是控制系统的核心技术,广泛应用于航空、航天、船舶、汽车等运动物体的自主控制[1]。
对于飞艇而言,导航指飞艇在地坐标系下获得当前的位置、速度、姿态、姿态角速度等状态信息;制导指飞艇主动发现或者人为输入期望的位置或速度信息,并根据当前状态、自身性能约束和外界环境约束,获得所需的控制指令;控制指飞艇通过推进器或者舵面等执行机构,改变自身姿态、速度等状态量,完成控制指令。
导航、制导和控制三个环节分别解决了飞艇”在哪儿”、”去哪儿”、”怎么去”的问题。
本文主要针对飞艇航线跟踪制导率的问题做了分析和仿真。
1 制导律所谓制导律,指飞艇飞向目标的过程中,飞艇和目标之间应满足的关系[2]。
为了使飞艇穩定而准确地跟踪目标,制导系统必须及时准确地提供制导信号,这个信号决定了飞艇的运动轨迹。
2航点跟踪目标追综指飞艇在向目标飞行的过程中,飞艇运动的速度向量V时刻指向目标,即制导方程为:3航线跟踪建立如图2所示坐标系。
航线跟踪的方法是提前设计路径,给出每一时刻的状态信息[3,4,5]。
制导设计满足条件:1)飞艇平面运动受到直接控制。
垂直方向的位置运动可以通过改变重浮力大小来控制;由于浮空器是自稳定系统,俯仰运动方向不需要额外控制即可保持稳定。
2)保证飞艇稳定在某一平面内,姿态角保持稳定,即,以及。
3)飞艇在指定路径上运动,。
考虑平面运动:由于浮空器是一个自稳定模型,浮空器俯仰运动和滚转运动单独控制,根据公式,令=0,=0 ,可知欠驱动浮空器在惯性坐标系ERF中的速度与机体坐标系BRF中的速度之间的关系:结束语:本文研究了飞艇控制系统中的制导率设计。
详细介绍了航点跟踪和航线跟踪的方法,并对控制方法的有效性和鲁棒性予以证明。
飞艇系留系统静态与动态仿真研究
飞艇系留系统静态与动态仿真研究飞艇系留系统静态与动态仿真研究摘要:本文基于飞艇系留系统的相关技术和理论,运用计算机仿真技术,对其静态与动态进行了建模和仿真研究,在此基础上对系统建立了数学模型,并通过仿真实验验证了模型的正确性和可靠性。
本研究为飞艇系留系统的相关研究提供了实用性的参考与指导。
关键词:飞艇系留系统;静态;动态;仿真研究一、前言随着国防和民用领域的不断深入发展,飞艇系留技术在现代化国防和军事装备领域如战术侦察、监视、通讯、控制、应急救援等应用价值广泛。
飞艇系留系统是指在飞艇上采用一种特殊的设备,通过绳索或钢索将地面工作设备悬挂在空中,并通过飞艇的平衡能力,确保悬挂的地面工作设备在一定高度、位置、角度安全、稳定地悬挂在空中。
飞艇系留技术对于改善地面通信和数据传输,保障公共安全,提高国家安全水平等具有非常重要的意义。
为了更好地研究飞艇系留技术,本文在以往相关研究的基础上,引入了计算机仿真技术,对飞艇系留系统的静态与动态进行了建模和仿真研究。
本文旨在研究飞艇系留系统在不同工作环境下的空气动力学特性,同时建立相应的数学模型,为飞艇系留技术的进一步优化和性能提升提供实用性的参考与指导。
二、飞艇系留系统建模1. 飞艇系留系统的外形尺寸、质量和飞行特性。
首先,对于飞艇系留系统的外形尺寸、质量和飞行特性进行建模,包括飞艇的长度、宽度、高度、质量、受力和飞行稳定性等参数。
由于飞艇系留技术在不同工作环境下具有不同的空气动力学特性,因此在建模过程中需要考虑风向、风速、天气等因素的影响。
2. 系留装置模型。
然后,对飞艇系留系统中的系留装置进行建模,包括绳索或钢索、飞艇的挂架、滑轮、牵引机构和传感器等部分。
其中传感器具有实时监测系统状态、控制飞机姿态等功能。
3. 地面工作设备模型。
最后,对于飞艇系留技术的应用,需要建立相应的地面工作设备模型。
地面工作设备分为动力源、传感器和数据处理设备,通过绳索或钢索和系留装置连接起来,悬浮在空中,实现对地面的通信和控制操作。
无人机系统仿真设计解决方案
无人机电磁仿真系统设计解决方案[键入文档副标题]2016/1/25目录无人机电磁仿真系统设计解决方案 (4)1.无人机的现状与未来发展 (4)1.1工程仿真的重要角色 (6)1.2电磁、结构、流体的多物理场仿真 (6)1.2.机载雷达同无人机的一体化设计仿真 (10)2.1整机电磁兼容设计 (12)2.2整机天线布局设计 (12)2.2.1整机天线布局仿真需求 (12)2.2.2ANSYS针对整机天线布局的功能特点 (12)2.2.3整机天线布局仿真实例 (13)2.3系统级射频干扰仿真平台EMIT (15)2.3.1多系统共址的射频干扰冗余度计算 (16)3.1机载射频系统设计 (19)3.1.1综合射频系统仿真 (20)3.1.2雷达系统仿真 (21)3.1.3通信系统仿真 (22)4.1.无人机的隐身设计 (23)4.1.1复杂飞行器的外形隐身设计与RCS仿真 (24)4.1.2介质涂覆材料的隐身设计及仿真 (24)4.1.3复合材料的隐身特性仿真 (25)4.1.4天线(阵)的RCS仿真 (26)4.1.5天线罩的RCS仿真 (27)4.1.6FSS与天线罩的RCS计算 (27)4.1.7缩减RCS设计与超宽带RCS (28)5.1雷电防护 (29)5.1.1雷电防护技术背景 (29)5.1.2雷电防护仿真需求 (29)5.1.3雷电防护仿真实例 (30)6.1多物理场耦合分析仿真实例 (34)7.ANSYS 电磁仿真软件简介 (38)7.1ANSYS HFSS 高频三维电磁场分析软件 (38)7.2ANSYS Q3D Extractor 三维模型寄生参数抽取软件 (39)7.3Ansoft Designer 电路• 系统• 电磁场综合设计环境 (39)7.4EMIT系统级射频干扰仿真平台 (40)7.5ANSYS SIwave应用于PCB 板、BGA 封装的SI、PI、EMI 分析软件 (41)7.6ANSYS Maxwell 二维/ 三维电磁场分析软件 (42)7.7ANSYS Simplorer 用于机电系统的电路和系统仿真工具 (42)7.8ANSYS RMxprt 旋转电机设计专家 (43)7.9ANSYS PExprt变压器,电感辅助设计工具 (44)7.10ANSYS Optimetrics (44)7.11DesignXplorer 多目标优化工具 (45)7.12HPC Option 高性能计算选项 (46)7.13ECAD Translators ( AnsoftLinks ) (46)7.14MCAD Translators ( AnsoftLinks ) (47)无人机电磁仿真系统设计解决方案1.无人机的现状与未来发展无人机(UAV)先后经历了无人靶机、预编程序控制无人侦察机、指令遥控无人侦察机和复合控制多用途无人机等发展阶段,目前已经发展到了无人作战飞机系统(UAS)。
无人机系统仿真设计解决方案
无人机系统仿真设计解决方案一想起无人机系统仿真设计,我脑海中立刻浮现出那复杂而又精妙的世界。
无人机,这个曾经只存在于科幻小说中的产物,如今已经渗透到了我们生活的方方面面。
那么,如何设计一套完善的无人机系统仿真解决方案呢?下面,我就用我十年的方案写作经验,为大家详细解答。
我们得明确无人机系统仿真的目标。
无人机系统仿真不仅仅是模拟无人机的飞行,还包括了无人机的控制、导航、通信、任务规划等多个方面。
所以,在设计解决方案时,我们要全面考虑这些因素。
1.仿真平台的选择在选择仿真平台时,我们要考虑到无人机的种类和仿真任务的需求。
目前市面上主流的仿真平台有MATLAB/Simulink、ANSYS、X-Plane 等。
MATLAB/Simulink适合进行算法研究和系统级仿真,ANSYS则擅长于结构分析和动力学仿真,而X-Plane则更侧重于飞行性能的仿真。
2.仿真模型的建立我们要建立无人机的仿真模型。
这个模型应该包括无人机的动力学模型、控制模型、导航模型、通信模型等。
在建立模型时,我们要尽量简化,抓住主要因素,忽略次要因素。
比如,在动力学模型中,我们可以忽略无人机的弹性变形,将其视为刚体。
3.仿真参数的设置在仿真参数设置方面,我们要根据无人机的实际参数来设置。
这些参数包括无人机的质量、惯性矩、翼载、推力等。
还要设置环境参数,如风速、温度、湿度等。
这些参数的设置将直接影响到仿真结果的准确性。
4.仿真流程的设计(1)初始化:设置仿真起始时间、仿真步长等。
(2)输入:设置无人机的初始状态、控制指令等。
(3)仿真:根据动力学模型、控制模型等,计算无人机的状态变化。
(4)输出:记录无人机的状态数据,用于后续分析。
(5)终止:判断仿真是否达到预设的终止条件。
5.仿真结果的分析仿真结束后,我们要对仿真结果进行分析。
这包括无人机的飞行轨迹、稳定性、控制性能等方面。
通过分析仿真结果,我们可以发现无人机系统存在的问题,并进行优化。
基于Plib的飞艇飞行视景仿真设计

集 成 化 的 软 件 , Mu i e rao/ E A 等 , 如 hG n C et: V G r 虽
然 可 以在 较 短 的 时 间 内 , 要 编 写 代 码 就 能 开 发 不 出完 整 的 应 用 程 序 , 其 算 法 都 是 预 先 设 计 的 , 但 缺 乏 对 模 型 的 实 时 控 制 , 活 性 较 差 , 作 为 商 灵 且 业 产 品 价格 昂 贵 。所 以 , 了 能 快 速 有 效 地 完 为
11 3
次 开发 库 , 要 较 多 的计 算 机 图形 学 知 识 和 编 写 需 大量 函 数 , 发 周 期 较 长 , 用 性 差 。 一 些 高 度 开 通
声 效 、 户 输 入 、 件 、 本 语 言 等多 种 功 能 , 用 文 脚 它 把 每 项 功 能 和 操 作 封 装 到 各 个 子 库 当 中 , 每 个 且
内容 丰 富 , 体 包 括 列 表 类 ( sSmpe i ) 实 体 大 sgi lLs 、 t
2 Pi l b介 绍
Pi l b是 1个 基 于 O e G p n L的 新 兴 的 视 景 仿 真
类 (sg ni 、细 节 类 ( sB a c 、状 态 类 sE ty) t sg rn h) ( sSae 、 质 纹 理 类 ( sT xue 。另 外 , S sg tt) 材 sg e tr ) SG 还可 以对摄 像 机 的位 置 、 景 光 源等 进行 操 作 。 场 S G库 实 际 上 也 是 S G库 的 1个 扩 展 。 S
飞艇高可信度CFD技术研究
飞艇高可信度CFD技术研究摘要在飞行器的CFD计算中,计算网格的类型、网格数量、网格质量以及求解时湍流模型的选取,对计算效率和计算结果的准确度有着决定性的影响。
本文分别从计算网格类型、网格数量以及湍流模型三方面入手,通过CFD计算与试验值对比分析,得出了适用于飞艇气动特性计算的CFD方法。
研究结果表明,采用笛卡尔网格、1/120网格单元尺寸比、SST k-w湍流模型可以得到高可信度的飞艇CFD计算结果。
关键字:CFD、计算网格、湍流模型1概述飞艇等低速飞行器的性能受风场和其它外界因素影响很大,在设计阶段,需要得到其全面的气动特性,为后续设计提供指导。
随着计算流体力学和计算机技术的高速发展,应用CFD软件对飞艇的气动特性进行计算,并通过后期的风洞试验假以验证,从而得到可靠的气动数据是现在飞艇设计研究的一般方法。
在进行CFD仿真计算时,针对具体的几何外形,计算网格类型的选用、计算域网格数量的确定以及计算湍流模型的选取对最终计算结果的准确性和计算效率具有极大的影响,因此,针对这几方面开展研究是很有必要的。
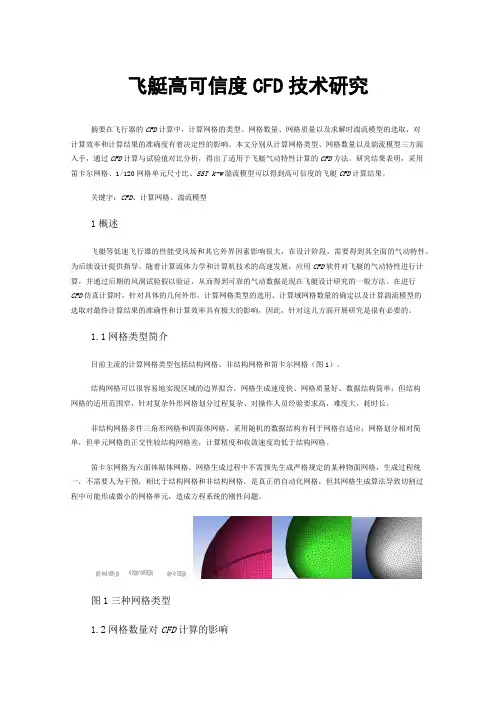
1.1网格类型简介目前主流的计算网格类型包括结构网格、非结构网格和笛卡尔网格(图1)。
结构网格可以很容易地实现区域的边界拟合,网格生成速度快、网格质量好、数据结构简单;但结构网格的适用范围窄,针对复杂外形网格划分过程复杂、对操作人员经验要求高,难度大,耗时长。
非结构网格多件三角形网格和四面体网格,采用随机的数据结构有利于网格自适应;网格划分相对简单,但单元网格的正交性较结构网格差,计算精度和收敛速度均低于结构网格。
笛卡尔网格为六面体贴体网格,网格生成过程中不需预先生成严格规定的某种物面网格,生成过程统一,不需要人为干预,相比于结构网格和非结构网格,是真正的自动化网格,但其网格生成算法导致切割过程中可能形成微小的网格单元,造成方程系统的刚性问题。
图1三种网格类型1.2网格数量对CFD计算的影响计算域内的网格数量,直接决定了求解的代数方程组的数量,并直接影响仿真计算的准确度和求解计算的耗时。
飞艇运动建模与仿真验证
第27卷 第1期 2009年2月飞 行 力 学FL I GHT D YNAM ICSV ol .27 N o .1Feb .2009 收稿日期:2008201229;修订日期:2008208217作者简介:王海峰(19712),男,陕西麟游人,讲师,研究方向为高空飞艇总体设计和仿真;宋笔锋(19632),男,陕西凤翔人,博士生导师,研究方向为飞行器设计。
飞艇运动建模与仿真验证王海峰,宋笔锋,钟小平(西北工业大学航空学院,陕西西安710072) 摘 要:在研究临近空间浮空器的过程中,设计了一种低空实验飞艇。
为了评价该飞艇的稳定性和操纵性,建立了飞艇的六自由度运动方程数学模型,使用Matlab /Si m ulink 软件完成了飞艇飞行仿真软件设计。
另外采用Flightgear 作为飞行仿真视景软件,设计飞行仿真软件驱动视景软件的网络接口程序。
利用飞行仿真软件,进行了该低空飞艇运动的仿真验证。
仿真结果表明,软件达到了预定的设计目标,该实验飞艇方案可行,安定面和推进动力配置基本合理。
关 键 词:临近空间;浮空器;飞艇;飞行仿真 中图分类号:V274 文献标识码:A 文章编号:100220853(2009)0120031205引言 临近空间浮空器在20~30k m 的高度上长时间保持相对于地球的准定点,飞行器需要利用推进动力克服平流层水平方向的大气风阻力。
目前由于太阳电池和再生燃料电池效率很低,能源系统提供的能量很有限,要保证浮空器长时间在预定地点停留,这样不仅对能源系统和推进动力提出了很大的挑战,同时也对浮空器自主飞行控制能力提出了很高要求[1]。
为了对临近空间浮空器进行深入研究,探讨各种方案的优劣,分析飞行性能与飞行品质,本文对飞艇的运动仿真进行了研究,设计了飞行仿真软件和视景系统。
最后,针对设计的一种低空实验飞艇方案,进行了初步的仿真验证。
结果表明,软件设计达到了预定的目标,此实验飞艇方案可行,构型配置合理。
无人机系统仿真设计解决方案
无人机电磁仿真系统设计解决方案[键入文档副标题]2016/1/25目录无人机电磁仿真系统设计解决方案 (5)1.无人机的现状与未来发展 (5)1.1工程仿真的重要角色 (7)1.2电磁、结构、流体的多物理场仿真 (7)1.2.机载雷达同无人机的一体化设计仿真 (11)2.1整机电磁兼容设计 (13)2.2整机天线布局设计 (13)2.2.1整机天线布局仿真需求 (13)2.2.2ANSYS针对整机天线布局的功能特点 (13)2.2.3整机天线布局仿真实例 (14)2.3系统级射频干扰仿真平台EMIT (16)2.3.1多系统共址的射频干扰冗余度计算 (17)3.1机载射频系统设计 (20)3.1.1综合射频系统仿真 (21)3.1.2雷达系统仿真 (22)3.1.3通信系统仿真 (23)4.1.无人机的隐身设计 (24)4.1.1复杂飞行器的外形隐身设计与RCS仿真 (25)4.1.2介质涂覆材料的隐身设计及仿真 (25)4.1.3复合材料的隐身特性仿真 (26)4.1.4天线(阵)的RCS仿真 (27)4.1.5天线罩的RCS仿真 (28)4.1.6FSS与天线罩的RCS计算 (28)4.1.7缩减RCS设计与超宽带RCS (29)5.1雷电防护 (30)5.1.1雷电防护技术背景 (30)5.1.2雷电防护仿真需求 (30)5.1.3雷电防护仿真实例 (31)6.1多物理场耦合分析仿真实例 (35)7.ANSYS 电磁仿真软件简介 (39)7.1ANSYS HFSS 高频三维电磁场分析软件 (39)7.2ANSYS Q3D Extractor 三维模型寄生参数抽取软件 (40)7.3Ansoft Designer 电路• 系统• 电磁场综合设计环境 (40)7.4EMIT系统级射频干扰仿真平台 (41)7.5ANSYS SIwave应用于PCB 板、BGA 封装的SI、PI、EMI 分析软件 (42)7.6ANSYS Maxwell 二维/ 三维电磁场分析软件 (43)7.7ANSYS Simplorer 用于机电系统的电路和系统仿真工具 (43)7.8ANSYS RMxprt 旋转电机设计专家 (44)7.9ANSYS PExprt变压器,电感辅助设计工具 (45)7.10ANSYS Optimetrics (45)7.11DesignXplorer 多目标优化工具 (46)7.12HPC Option 高性能计算选项 (47)7.13ECAD Translators ( AnsoftLinks ) (47)7.14MCAD Translators ( AnsoftLinks ) (48)无人机电磁仿真系统设计解决方案1.无人机的现状与未来发展无人机(UAV)先后经历了无人靶机、预编程序控制无人侦察机、指令遥控无人侦察机和复合控制多用途无人机等发展阶段,目前已经发展到了无人作战飞机系统(UAS)。
毕业设计--高速无人艇设计及运动预报仿真系统
“斯巴达侦察兵” 是 一种具备半自主能力、可 从水面舰船或岸上发射的 无人水面艇,可执行水雷 战,情报、监视与侦察, 护防,及反潜战等任务。
在2006年弗吉尼亚ultiagency展会上的TUSSV-HTF无人艇
上图为美国海军水面 作战中心卡德罗克分部研 发的无人驾驶海面舰艇, 其正在美国东海岸之外的 海面上行动。
湿面积 Si li / cos 均可得到 ,并计算雷诺数和摩擦阻力。 ❖ 5)按式(1)计算各纵倾角 i 时的相应阻力 Rti ,并作出
曲线 Rt i f3 ( i ) , ❖ 6)计算得各纵倾角 i 时在水压力中心位置 i f4 ( i ) 。 ❖ 7)有已知艇体重心距尾板距离 g,在i fi ( i ) 曲线上得到
❖ 要求解上式,需要知道等式左边的质量和转动惯 量。质量就是滑行艇所求工况下的实际重量;要 精确地求出转动惯量是比较困难的,它和船艇的 结构、材料密度、设备的安装等有关,因此采用 经验公式来估算对轴的纵摇转动惯量:
I y (0.25L)2 m
式中:L为滑行艇的长度。
江苏科技大学本科毕业设计
❖由于纵向附加质量的数值较之船的质量要 小的多,仅为其值的,故近似认为:
6
7
8
9
10
第五章 运动预报仿真系统
❖ VB求数值微分方程(组)形式
三、浮力(矩)的计算公式
❖从流体力学可知,静浮力的产生机理是被 浸物体上下表面的压力差形成的。其计算 公式不作具体推导,直接引用如下:
❖
BH gVH
❖式中:VH 为滑行艇主船体的排水体积。
❖由此产生的浮力矩为:
❖
M By BH xB
❖式中:xB 为静浮力作用点距艇体重心的水平 力臂。
(完整版)无人机飞行控制系统仿真研究本科生毕业论文
1 绪论本章先主要介绍了无人机进无人机的特点,国内外研究现状和发展趋势及这篇文章的主要内容安排。
1.1无人机概述无人机即无人驾驶飞机,也称为遥控驾驶飞行器,是机上没有驾驶员,靠自身程序控制装置操纵,自动飞行或者由人在地面或母机上进行遥控的无人驾驶飞行器,在它上面装有自动驾驶仪、程序控制系统、遥控与遥测系统、自动导航系统、自动着陆系统等,通过这些系统实现远距离控制飞行。
无人机大体上由无人机载体、地面站设备(无线电控制、任务控制、发射回收等起降装置)以及有效负荷三部分组成。
无人机在航空业已有一百年的历史了。
第一驾遥控航模飞机于1909年在美国试飞成功。
1915年10月德国西门子公司研制成功采用伺服控制装置和指令制导的滑翔炸弹,它被公认为有控的无人机的先驱。
世界上第一架无人机是英国人于1917年研制的。
这是一架无线电操纵的小型单翼机,由于当时的许多技术问题,所以试验失败。
一直到1921年英国才研制成可付诸实用的第一驾靶机。
1918年德国也研制成第一驾无人驾驶的遥控飞机。
1920年简氏《世界各地飞机》首次提到无人机。
20世纪30年代初无线电操纵的无人靶机研制成功。
在20世纪40至50年代,无人机逐渐得到了广泛使用,但这时主要是作为靶机使用。
世界各国空军于20世纪50年代大量装备了无人驾驶飞机作为空靶。
进入20世纪60年代后,美国出于冷战需要,将无人机研究重点放在侦察用途方面,这标志着无人机技术开始进入了以应用需求为牵引的快速发展时代。
由于无人机具有低成本、零伤亡、可重复使用和高机动等优点,因此深受世界各国军队的广泛欢迎,近年来得到了快速发展。
对于无人机而言,其自动飞行控制系统的设计是至关重要的,它的优劣程度直接影响到无人机各项性能(包括起飞着陆性能、作业飞行性能、飞行安全可靠性能、系统的自动化性和可维护性等)。
因此,研究无人机的自动飞行控制技术具有十分重要的现实意义,尤其是在军事上的重要性己经得到国内外的高度重视,而无人机飞行控制系统是无人机能够安全、有效地完成复杂战术、战略使命的基本前提,因此迫切需要加强该领域的研究工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
时 , 广泛 应 用在 军 事 、 输 等 多个 断 进 步 , 艇 又 被 人们 赋予 飞
一
仅要充分考虑总体的优化设计而且还要投入大量的
人力 、 力 、 物 财力 。高 空飞艇 的研 究 在世界 范 围内还
是一个前沿课题 , 可借鉴 的成功经验不多。在计算 机科学飞速发展的今 天, 采用传统 的设计 方法开发 无人飞艇项 目显然会出现高风险、 高投入、 低效率的 问题 。建立一个无人飞艇仿真系统是避免出现这些
文章编 号 :6359 (07)2130 17 -6 2 20 0 —7 -7
Re e r h o i l to fUn a n d Ais i y t m s d o s a c n S mu a i n o m n e r h p S se Ba e n HLA
Ab t a t s r c :Ais p i i d o ic a tlg e h n a r n r c n e r ,ma y c u ti sh v d r a rhi s a k n fa r rf ihtrt a i.I e e ty a s n o n re a e ma e g e t ef rs t mp o e t e ar hp t c n lg O a o me tt e ne n e s he smua in tc n l g so e o f t o i r v h is i e h o o y S st e h w e d .T i lto e h oo i n f o y
Ke o d : hg vl r i c r H A) n a n da h yt yw rs i l e ac t t e( L ;u m n e i i ss m;ss m s uai h e h eu s r p e yt i l o e m tn
0 引 言
飞艇 起源 于 l 9世纪 , 2 纪 3 在 0世 0年代 曾盛极
tem s i p r n to ea si ss m rsac ,w i ly et o ntepo c dvl — h ot m o a tol i t i hp yt eerh hc pasag a rl i h rj t ee p t snh r e h r e e o
me tpr c s .Afe n a ay i far hp s se Sc mp sto n r i g t o y,t i a e o i e n o e s tra n l sso i i y tm o o ii n a d wo k n he r s h sp p rpr vd sa s c e suld sg c me o h n n e is i y t m. Me n u c sf e in s he ft e u ma n d a rh p s se a whi l e,b t he d sg ff d r t s a d oh t e i n o e e ae n t e d sg f if r to n e c a g s bewe n f d r t s a e x tae h e in o n o mai n i t r h n e t e e e ae r e pai td;t e s e c p f if r ain h k th ma o n o m to ta se t e e e ae s a s i e r n frbewe n f d r t s i lo gv n. Atls ,t i pe ie he r s t ft i i lto e e r h. a t h spa rg v st e ul o h s smu ain r s a c s
维普资讯
第 2期
20 0 7年 4月
国雹; q宪 纠学 隍学瓶
J u n lo AE T o r a fC I
V0. . 1 2 No 2
Ap . 2 0 r 07
无 人 飞艇 系统 仿 真 研 究
魏 丽 , 晓钧 , 玉 宾 王 冯
WE i I ,WA G Xa - n E G Y —i L N i j ,F N ubn ou
( h aA ae yo l t n sadIf mao eh ooy B in 0 0 1 hn ) C i cd m f e r i n no t nT cnlg , e ig10 4 ,C ia n E coc r i j
10 4 ) 0 0 1 ( 国电子科 学研 究 院 , 京 中 北
摘 要: 无人飞艇 系统仿真在飞艇 系统工程研发过程 中起着非常重要的作用。在分析 了飞艇 系统 组成 和工作 原 理 的基 础 上 , 出了基 于 HL 的无 人 飞艇 系统 仿 真设 计 方 案 , 具体 阐述 了联 邦 成 提 A 并
员及联 邦 成 员间信 息 交互 的设 计 , 出了联 邦 成 员间信 息传 递 关 系的 示意 图。 最后 , 述 了仿真 试 给 描 验 的初 步结果 。 关键 词 :高层 体 系结 构 ; 无人 飞艇 系统 ; 系统仿 真
中图分 类号 :P9 . T 3 19
文献标 识 码 : A