基于偏载工况的装载机工作装置刚
装载机工作装置动态载荷测试方法与试验研究

装载机工作装置动态载荷测试方法与试验研究随着科技的不断进步,装载机铲装作业过程中的动态载荷时间历程是从工作工装置各铰接点处获得的,动平衡状态下作装置的受力模型是基于达朗贝尔原理建立,科学技术人员提出一种考虑构件重力和惯性力的动态载荷测试方法。
通过对铰点力、油缸压力、油缸位移和动臂应变等多参数进行构建之后建立同步采集系统,最后实行散状物料铲装试验,从而在试验中获得了求解受力模型的基础数据。
建立动臂有限元仿真分析模型可以通过分析模型对比分析测点应力实测值和仿真值。
本文通过提出的测试方法进行实验从而获得的结构应力值,应力值也在准确地反映工作装置在铲掘作业过程中的应力分布规律,仿真值与实测值的变化趋势一致,同时验证了数学模型和测试方法的合理性。
标签:装载机;工作装置;动态载荷;测试方法装载机是一种典型性的土方施工机械,在日常施工中的施工环境是复杂多样的,因此传动系零部件的破损现象也会较为严重。
载荷时间历程是会通过施工作业中的真实受力情况发生变化的,并且在进行施工中要求相关人员可以详细了解作业过程中应力的大小变化,依托国家科技支撑计划“土方机械疲劳可靠性研究项目”,研究装载机工作装置动态载荷测试方法[1]。
本文依据多语言铲装试验的结果进行了详尽分析,验证设想方法的可行性,为轴类零件动态载荷测试以及载荷谱编制提供有效帮助。
一、动态载荷测试方案装载机动力传动系统是有发动机、夜里变矩器、变速箱以及传动轴半轴和齿轮组成的。
发动机的动力经液力变矩器和变速下昂后传递给传动轴,传动轴与变速箱之间是通过联轴器进行连接起来的。
力数学模型中的动平衡状态下建立的工作装置中,各铰点的动态载荷是通过实测工作装置在作业过程进行实验的,从而获得整个模型的解。
因此在进行实验的时候为了获得各构件位置参数,所以需要研究人员确定动臂油缸、转斗油缸位移和铲斗倾角位移,从而保证油缸压力和铰点A 处的外力作为模型求解的已知输入参数。
油缸位移用拉线式位移传感器测量,油缸压力用压力传感器测量,铲斗倾角用角度位移传感器测量,铰点力用二维销轴力传感器。
基于ANSYS的装载机工作装置动臂应力分析

l
收稿 1 期 :2 0 — 0 2 5 1 0 8 1— 0
:
l
铲取 阻 力 计 算 ( 直 载荷 ) 垂 :取 额 定 装 载量 ,按 静
作者简介:邹国辉 (90 ) 18- ,男,在读研究生。研 究方向: }
工程机械 。 l
} 拟 。故 质量 模型 采用 I
寸 不 均 .并 非 远 大于 厚度 方 向尺 寸 ,不可 用 板壳 单 元 模
S UD1 6和 S UD17单 元 ,其 中 O 8 O 8
置工作寿命当中,失效 主要表现为铲斗的磨损和刃 口变 1 臂 铰 点采 用 自由度耦 合来 简 化模 拟这 种 铰接 关 系 。将 节 形 。而动臂有足够 的强度储备 。本文用现代设计方法 中 l 点 坐 标 系 转 变 成 柱 坐 标 系 ,然 后 ,每 对 节 点耦 合 r向
1 工 况分 析
; 荷 工况 条 件下 ,动 臂 的两 个油 缸 受力 不均 ,此 时在 动 臂
根据实验及分析可知 ,装载机极限应力工况包括水 l 上 铰 点 和 下 铰 点 受 力 较 小 一 侧 施 加 相 应 约 束 。
平 和 垂 直 载 荷 同 时 作 用 的 对 称 载 荷 工 况 和 偏 心 载 荷 工 I
2 有 限元 计 算 模 型
,
} :
l
FV o O P d 1 o a
式 中 : 一 装 载机 轮 边 功 率 ;V厂 装 载 机 插入 料 堆
.~ .。所 以上 式 成 立 ,则 取 装载机工作装置动臂 由动臂 、横梁 ( 也称鸭蛋圆) l 时 的 行 走 速 度 ,一 般 取 03 08 、  ̄10P 摇臂支耳焊接而成 。有 限元模型中,动臂长、宽方 向尺 { F F : ;如 上式 不成 立 ,则 取 F= 0 0 。 d
挖掘装载机工作装置结构设计论文
目录第一部分:系统开发建议书..........................共5页第二部分:WZ45.40装载工作装置设计.. (40)摘要:第一章:整机概述 (1)第一节:绪论 (1)第二节:国内外发展现状 (2)第三节:挖掘装载机发展特点 (5)第二章:铲斗设计······································.7 第三章:挖掘装载机工作装置结构设计·····················.10一、确定动臂长度、形状与车架的铰接位置 (11)二、连杆机构设计·······································.15三、转斗油缸与摇臂的铰接点以及下拉杆与机架铰接点的确定” (16)四、举升油缸与动臂和机架的铰接点 (17)五、铲斗举升平动分析及最大卸载高度、最小卸载距离的确定.................................................l 8 第四章:工作装置的受力分析............................21 第五章:工作装置的运动仿真. (32)第六章:工艺分析......................................33 第七章:工作装置的限位机构..............................35 第八章:设计心得及实习体会.............................37 第九章:附录............................................38 第三部分:翻译材料 (13)页系统开发建议书1.产品用途及使用范围:轮式装载机是一种用途广泛的施工机械,广泛应用于建筑公路铁路水电港口矿山及国防工程中,对加快工程建设速度减轻劳动强度提高工程质量降低工程成本都发挥这重要作用。
ZL50装载机工作装置设计说明书
太原科技大学毕业设计说明书(2008届)ZL50装载机反转单连杆工作装置设计学生姓名学号院系专业指导教师日期ZL50装载机反转六连杆工作装置设计摘要装载机是工程机械的主要机种之一,广泛用于建筑、矿山、水电、桥梁、铁路、公路、港口、码头等国民经济各部门。
本文中参阅了大量的土方机械的设计参考书,其中大多数是有关装载机方面的,有的是工作装置单一构件的设计,有的则是整个工作装置的设计,并且有许多有关工作装置优化设计方面,各参考所涉及到的装载机虽然型号不同,研究的方法也有差异,但综合起来基本上也概述了现行的设计方法。
国外装载机发展迅速,而我国装载机在设计上存在很多问题,其中主要集中在可靠性、结构设计强度等方面。
而工作装置对于装载机来说又是重中之重,所以工作装置的设计好坏直接影响到装载机的使用寿命以及工作效率等。
虽然现在市场上的装载机已经日趋成熟,但对其进行改进设计仍有非常重要的意义,尤其是装载机的工作装置。
装载机工作装置的转斗六连杆机构是由与液压缸,铲斗相关联的两个四连杆机构组合而成。
轮式装载机在作业时,靠改变液压缸的长度来使铲斗获得所要求的收斗角和卸料角。
机构中各杆件长度及其结构参数确定后,需要对该机构作某些特定计算,以判断机构设计的正确性。
在工作循环中速度与加速度变化合理;油缸活塞行程为最佳值;工作装置运动平稳、无干涉、无死点、无自锁;动臂从最底位置到最大卸载高度的举升过程中,保证铲斗中物料不洒落;在卸载后,动臂下放至铲掘位置铲斗能自动放平。
关键词工程机械,装载机,工作装置The Turn Withershins 6-link Work Equipment Design ofZL50 Wheel LoadersAbstractThe loader is one of the main kind of the engineering machinery, used in every department of national economy such as the building , mine , water and electricity , bridge , railway , highway , port , quay extensively. In this article has referred the massive folk recipes machinery design reference book, majority is the related car loader aspect, some are works the equipment sole component design, some then is the entire work installment design, and has many related work installments optimization design aspect, each reference involves to the car loader although the model is different, the research method also has the difference, but synthesized basically has also outlined the present design method. The overseas loader development is rapid, but our country car loader has very many problems in the design, mainly concentrates in aspect and so on reliable, structural design intensity. But works the installment regarding the loader to say also is extremely important, therefore the work installment design is good and bad affects directly the car loader service life as well as the working efficiency and so on . Although in the present market car loader already day by day was mature, but carried on the improvement design to it still to have the extremely vital significance, in particular loader work installment. Loading the machine work equips of turn the container six connect pole organization is from press with liquid an urn of, the container mutually connection of two four connect the pole organization combine.A type loads the machine at homework, is pressed by the liquid of changes an urn lengths to makes the container acquired requests of accept the Cape of the container with unload to anticipate the Cape.Each pole in inside in organization a length and its construction parameter certain empress, need to make the some and particular calculation to that organization, the accuracy that to judge the organization the design.In worked circulation the speed changes with acceleration the reasonable;The oil a piston route of travel is the best value;The work equips the sport steady, have no to interfere with, have no the dead center and have no from the lock;Move the arm from most the bottom position arrives the biggest unloading to raise to rise the process inside highly, guaranteeing the container the inside the material do not spread to fall;After unloading, move the arm descend to put to the container to dig the position container can put automatically even.KEY WORDS Construction Machine, Wheel Loaders ,Work Equips目录中文摘要┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈1 英文摘要┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈2 目录┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈3 前言┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈5 1. 装载机工作装置设计概述┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 61.1装载机工作装置设计概述┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈61.2结构型式选择┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈62.铲斗的设计┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 82.1铲斗设计要求┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 82.2铲斗斗型的结构分析┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 92.2.1切削刃的形状┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈92.2.2铲斗的斗齿┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈92.2.3铲斗的侧刃┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈102.2.4斗体形状┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈102.3铲斗基本参数的确定┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈102.4斗容的计量┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈122.4.1几何斗容(平装斗容)┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈122.4.2额定斗容(堆装斗容)┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈133. 工作装置的结构设计┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 143.1工作机构连杆系统的尺寸参数设计┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 153.2机构分析┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈153.3设计方法┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈153.4尺寸参数设计的图解法┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈163.4.1 动臂与铲斗、摇臂、机架的三个铰接点G、B、A的确定┈┈┈ 163.4.2连杆与铲斗和摇臂的两个铰接点F、E的确定┈┈┈┈┈┈┈ 183.4.3转斗油缸与摇臂和机架的铰接点C和D的确定┈┈┈┈┈┈203.4.4举升油缸与动臂和机架的铰接点H及M点的确定┈┈┈┈┈┈223.5确定动臂油缸的铰接位置及动臂油缸的行程┈┈┈┈┈┈┈┈┈┈┈233.5.1动臂油缸的铰接位置┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈23l 的确定┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 243.5.2动臂油缸行程H3.6工作装置连杆系统运动分析┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈253.6.1铲斗对地位置角┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈253.6.2最大卸载高度和最小卸载距离┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 283.6.3铲斗卸载角┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈294. 工作装置的强度计算┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 294.1计算位置┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈294.2外载荷的确定┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈304.3工作装置的受力分析┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 314.4工作装置的强度校核┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 354.4.1动臂┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈354.4.2铰销┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈364.4.3连杆┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈375. 装载机工作装置中油缸作用力的确定┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈385.1铲起力的确定┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈395.2转斗油缸作用力的确定┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 405.3动臂油缸作用力的确定┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 415.4转斗油缸与动臂油缸被动作用力的确定┈┈┈┈┈┈┈┈┈┈┈┈ 426. 工作装置的限位机构┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 426.1铲斗转角限位装置┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 426.2动臂升降的自动限位机构┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈43参考文献┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 45 致谢┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈ 46前言装载机是以轮胎式或履带式拖拉机为基础车,安装上铲斗作为工作装置的一种土方工程机械。
装载机安全管理制度
装载机安全管理制度装载机安全管理制度1、起步前,应先鸣声示意,宜将铲斗提升离地500mm,行驶过程中应测试制动器的可靠性,并避开路障或高压线等。
除规定的操作人员外,不得搭乘其他人员,严禁铲斗载人。
2、高速行驶时,应采用前两轮驱动;低速铲装时,应采用四轮驱动。
行驶中应避免突然转向铲斗,装载后升起行驶时,不得急转弯或紧急制动。
3、装料时,应根据物料的密度确定装载量。
铲斗应从正面铲料,不得铲斗单边受力;卸料时,举臂翻转铲斗,应低速缓慢动作。
4、在松散不平的场地作业时,应把铲臂放在浮动位置,使铲斗平稳地推进,当推进时阻力过大时,可稍稍提升铲臂。
铲臂向上或向下动作到最大限度时,应速将操纵杆回到空挡位置。
5、操纵手柄换向时,不应过急过猛;满载操作时,铲臂不得快速下降。
6、不得将铲斗提升到最高位置运输物料,运载物料时宜保持铲臂下较点离地面500mm,并保持平稳行驶。
7、铲装或挖掘时,应避免铲斗偏载,不得在收斗或半收斗而未举臂时前进。
铲斗装满后应举臂到距地面约500mm时再后退转向卸料。
8、当铲装阻力较大出现轮胎打滑时,应立即停止铲装,排除过载后再铲装。
9、在向自卸汽车装料时,宜降低铲斗及减小卸落高度,不得偏载超载和砸坏车箱。
10、机械运行中,严禁接触转动部位和进行检修。
在修理工作装置时,应使其降到最低位置,并应在悬空部分垫上方木。
装载机转向架未锁闭时,严禁站在前后车架之间进行检修保养。
11、在边坡濠沟凹坑卸料时,轮胎离边缘距离应大于1.5m,铲斗不宜过于伸出。
在大于30的坡面上不得前倾卸料。
12、作业时内燃机水温不得超过90℃,变矩器油温不得超过110C,当超过上述规定时,应停机降温。
13、作业中遇到下列情况,应立即停止操作:填挖区土体不稳定,有坍塌可能时;气候突变,发生暴雨、雷电、水位暴涨及山洪爆发时。
14、操作人员离开驾驶室时,必须将铲斗落地并关闭发动机。
15、停车时,应使内燃机转速逐步降低,不得突然熄火,以防止液压油因惯性冲击而溢出油箱。
ZL20装载机工作装置设计

(3)根据最大卸载高度、最
小卸载距离和卸载角,画出 铲斗在最高位卸载的位置, 即工况IV,如图所示。 (4)以G’点为圆心,顺时针 旋转铲斗,使铲斗斗口与x 轴平行,即铲斗被举升到最 高位置图(工况Ⅲ)。 (5)连接GG’并作其垂直平 分线,因为G和G’点同在以A 点为圆心,动臂AB长为半径 的圆弧上,所以A点必在GG’ 的垂直平分线上。
⑤
C、D点的选择:
C点和D点的布置直接影响到铲斗举升平移性和自动放平 性能,对铲取力和动臂举升阻力有较大的影响。从力传 动效果出发,显然摇臂LBC段长一些有利,可以增加转斗 油缸作用力臂,使铲取力相应增加,但增加LBC必将减少 铲斗和摇臂的转角比,造成铲斗转角难以满足各个工况 要求,转斗油缸过长。 初步设计时,一般应满足LBC ≈(0.7~1.0) LBE,C点一般 取B点的左上方(工况I),并满足∠CBE=1300 ~ 1800、 BC杆与CD杆尽量垂直,C点不与铲斗干扰、不影响司机 的视野。 D点是依据自动放平和平移性这两大要求来确定的,在 转斗油缸长度保持不变的条件下,从工况IV下降到工况I 过程中C1和C4连线的乖直平分线和从工况II到工况III过 程中C2和C3连线的垂直平分线的交点就是D点。研究证 明的D点应在A点的左下方为较好,这样平移性能好,减 小动臂举升外阻力矩,有利于举升油缸的设计。
动臂长度的确定: 本例取2300mm左右。
B点的选择:
一般取B点在AG连线 的上方,过A点水平线 的下方,并在AG的垂 直平分线左侧尽量靠近 工况Ⅱ时的铲斗处。相 对前轮胎,B点在其外 廓的左上部。B点选择 的好坏,对连杆机构的 传动比、倍力系数、连 杆机构的布置以及转一 斗油缸的长度等都有很 大的影响。
S S1 S2 S3 S4 S5
ZL50C-Ⅱ轮式装载机高卸载工作装置的设计

ZL50C-Ⅱ轮式装载机⾼卸载⼯作装置的设计ZL50C-Ⅱ轮式装载机⾼卸载⼯作装置的设计摘要:装载机的铲掘和装卸物料是通过⼯作装置的运动⽽得以实现的。
⼯作装置直接影响装载机的性能参数和作业效率。
合理的设计⼯作装置在整机设计中占有⼗分重要的地位。
本⽂着重论述了ZL50C-Ⅱ轮式装载机⾼卸载⼯作装置设计。
⽬录概述 (1)1 装载机⼯作装置的结构类型 (4)2 装载机⼯作装置的结构设计 (6)2.1 铲⽃的设计 (6)2.2 动臂的设计 (7)2.2.1动臂的形状与结构 (7)2.2.2动臂绞点位置及长度的确定 (8)3连杆机构中的构件尺⼨及绞接点位置的确定 (9)我⼚研制开发的ZL50C-Ⅱ轮式装载机融合了国内外先进机型的优点,在设计理念上有了新的突破,在充分考虑了提⾼作业效率和⼯作性能的同时,还充分体现了⼈机⼯程和环保理念,技术⽔平在国内处于领先地位。
该机造型新颖、美观;采⽤流量放⼤转向和单柄操作先导控制的⼯作液压系统,操作更轻便;采⽤可调整的减震座椅,全封闭隔⾳司机室,全空调设计,使司机操作更舒适,作业效率明显提⾼;该机采⽤铰接点对中布置,转弯半径更⼩;全液压⾏车制动系统,制动性能更佳、更可靠;作业速度更快,举升时间达到5.6秒,速度提⾼15%。
该机优越的使⽤性能给⼴⼤⽤户带来了更⼤的⽅便和利益。
随着煤碳⾏业的振兴和旺销。
该⾏业需要⾼卸载、⼤⽃容的⼯作装置装载机来铲装运输煤碳和焦碳⽤以提⾼作业效率。
为了满⾜客户需要,我⼚为ZL50C-Ⅱ型装载机设计了卸载⾼度为3500mm的⾼卸载⼯作装置。
⼯作装置是装载机上直接实现铲装物料的机构,它的结构和性能对整机的⼯作尺⼨、性能参数、发动机功率及⽣产率等都有显著影响。
因此,它的设计在整机设计中占有⼗分重要的地位。
⽬前,常⽤的装载机⼯作装置由铲⽃、动臂、连杆、摇臂、转⽃油缸、举升油缸等组成。
⼀般对装载机⼯作装置的设计要求有:动臂举升过程中,铲⽃上翻⾓(或称收⽃⾓)的变化尽量⼩,保持物料不撒落;动臂举升时切削刃轨迹符合⼯况要求,且铲掘时掘起⼒变化规律符合⼯作要求;连杆系统在整个运动过程中,不得出现“死点”和“撕裂”现象,⼯作机构各构件之间,不允许发⽣“⼲涉”;传动⾓的变化范围有⼀定的限制,以保证⼯作装置的传⼒性能良好;机构传动应省⼒,作业时所消耗的功率要尽量⼩;转⽃油缸活塞杆伸长不变,当动臂油缸从最⾼位置到最低位置时,铲⽃应能⾃动呈插⼊料堆状态,以简化司机操作;保证在动臂举升的任意位置上都能卸载,即铲⽃卸料⾓⼤于等于45°;⼯作装置的极限⼯作空间、最⼤卸料⾼度及最⼤卸料距离等应满⾜整机性能要求。
大型轮式装载机工作装置参数化装配有限元分析与改进设计
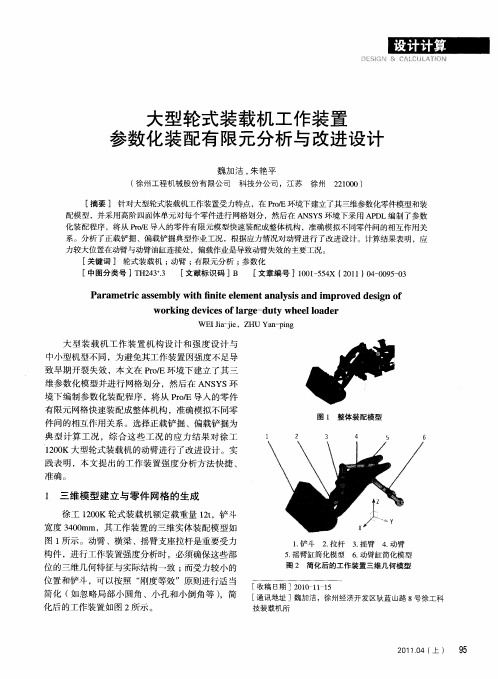
图 1 整体装配模型
3 4
1 三维模型建立与零件 网格的生成
徐工 10 K轮式装载机额定载重量 1t 20 2,铲斗 宽度 3 0m 4 0 m,其工作装置的三维实体装配模型如 图1 所示。动臂 、横梁 、摇臂支座拉杆是重要受力 构件 ,进行工作装置强度分析时 ,必须确保这些部 位 的三 维几 何特 征 与实 际结构 一致 ; 而受力 较 小 的 位置和铲斗 ,可以按照 “ 刚度等效”原则进行适 当
维参数化模型并进行 网格划分 ,然后在 A S S N Y 环 境 下 编制 参 数化 装配 程 序 ,将从 PoE导入 的零 件 r/ 有限元 网格快速装配成整体机构 ,准确模拟不同零 件间的相互作用关系。选择正载铲掘 、偏载铲掘为 典 型计算工况 ,综合这些工况 的应力 结果 对徐工
10K大 型 轮式装 载 机 的动臂 进行 了改 进设 计 。实 20 践 表 明 ,本 文提 出 的工作 装 置 强度 分析 方 法 快捷 、
分析。
32 载 荷计 算与 边界 条件 的施 加 . 工 作装 置受 到 的 载 荷 主 要 有 插 人 阻 力 和 铲 斗
掘起阻力 , 其支承边界条件是约束驱动桥和地面的
图 3 动 臂 的 有 限元 模 型
相对运动。采用装载机作业工况铲斗受力计算方法
l_] 23
,
得 到正 载 水 平 最 大 牵 引 力 为 20N,正 载 最 5k
Pa a e r ca s m b y wih f t lm e na y i n i pr v d de i n o r m ti se l t nie ee nta l ssa d i m o e sg f
wo ki g de i e fl g — r n v c so ar e— dut y whe l o de e a r l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于偏载工况的装载机工作装置刚-柔耦合分析
王云超1,刘春2,黄素德2
本文在《中国测试》2013年第39卷第6期页码:114-117
(1. 集美大学机械工程学院,福建厦门361021; 2. 厦门厦工机械股份有限公司博士后工作站,福建厦门361021)
摘要:为能够更加全面真实地反映装载机工作装置在偏载工况下的动臂受力和变形规律,利用ADAMS和EASY5软件建立装载机工作装置的刚-柔、机-液耦合的联合仿真模型。
通过样机测试数据对仿真模型的正确性进行分析验证,并进一步深入探讨提升油缸的连通式和独立式连接方式对动臂受力的影响。
对比分析发现:极限偏载崛起工况下,连通式的动臂最大应力很接近许用应力,因此,在交变载荷作用下很容易产生裂纹;而独立式连接方式既可以防止动臂过载,也提高了动臂的抗扭能力。
这为装载机工作装置的设计提供了有益借鉴。
关键词:装载机;提升油缸的连接方式;刚-柔、机-液联合仿真;偏载工况
中图分类号:TH243.1;TP274;TP391.9;TM930.12 文献标志码:A 文章编号:1674-5124(2013)06-0114-04
Rigid-flexible coupling analyses of loader working device based on offset load
WANG Yun-chao1,LIU Chun2,HUANG Su-de2
(1. College of Mechanical Engineering,Jimei University,Xiamen 361021,China;
2. Post-doctoral Working Station of Xiamen XGMA Machinery Co.,Ltd,Xiamen 361021,China)Abstract: To comprehensively reflect the force and deformation of working device of the loader under offset load condition,a mechanism-hydraulic and rigid-flexible coupling co-simulation model of the loader working device was built by ADAMS and EASY5 software. Based on the correctness of co-simulation model verified by the test results,the effect of linked and dependent lift cylinder connection modes on the lift arm force was deeply researched. The comparison between two lift cylinder connection modes shows that the maximum stress of lift arm with linked lift cylinder is just within the allowable stress under limit breakout force of offset load condition. So the lift arm is liable to crack under the action of alternating load. But the dependent lift cylinder connection mode not only can avoid overloading but also can improve torsional strength. It is a useful reference for the design of the working device of loader.
Key words: loader;connection modes of lift cylinder;mechanism-hydraulic and rigid-flexible co-simulation;offset load condition。