移动机器人多传感器的实时动态测试与控制
移动机器人多传感器测距系统研究与设计
关键词 : 超声波传感 器; 红外测距传感 器; 比较 器整形 电路 ;P A 双 FG
中 图分 类号 : P 1 ;P 4 T 2 2 T 22 文 献 标 志 码 : A
Re e r h a d d s n o lis n o a g n y t m n mo i o o s a c n e i fmu t-e s r r n i g s se 0 b l r b t g e
摘
要: 设计 了多传感器测距 系统 的硬件 电路和相应的软件 , 用高速 运放 和 高速 比较 器减小信号传输延 时, 采 用
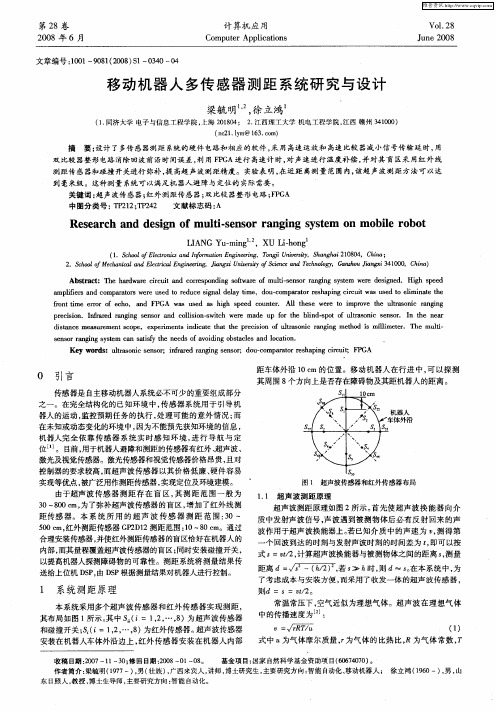
双 比较 器整形 电路 消除回波前沿 时间误差 , 用 F G 利 P A进行 高速计 时, 对声速进行 温度补偿 , 并对其 盲 区采 用红外线
测距传感 器和碰撞 开关进行 弥补 , 高超 声波测距精度。实验表 明 , 近距 离测量 范围 内, 提 在 该超声波 测距 方法可 以达
sno r gn s m cnstt t ed f vi n btc s n ct n esr ai gs t a as enes od gos l dl a o. n ye iy h oa i aea o i K yw r s l r oi sno;if e ag gsno;d ucm a t saigc ci P A e od :u a nc esr nr d r i esr o—o pr o r h pn i u ;F G t s r a n n ar e r t
移 动 机器 人 多传 感 器 测 距 系统 研 究 与设 计
梁毓 明 , 立 鸿 徐
(. 1 同济大学 电子与信息 工程学院 , 上海 2 10 ; 2 江西理工大学 机电工程学 院, 08 4 . 江西 赣州 3 1 0 40 ) 0
基于GPS的移动机器人多传感器定位信息融合

.
厂 表示椭球扁率 = .0 5 1667 7 厂 0033280 4 4
e 表示第一偏 率 , =f f t e 2— l ,
利用绝对定位和相对定位相结合的方法 , 实现移 动 机器人定位. 多传感器数据 自 适应加权融合估 计算 法不要求知道传感器测量数据的任何先验知识 , 计
收稿 日期 : 06 0 —6 20 —6 2 . 基金项 目: 天津市 自 然科学基金 ( 2 65 1 ) 0 3 10 1 第一作者 : 盂祥荔 (9 1 1 8~ ) , 女 硕士研究生
然后利用全景 图像数 据精 确定 位 ; 用多传感器数据
融合算法融合 G S定位数据和其他数据信息组成定 P
位系统. 基于 G S的移动机器人定 位系统 由 G S 方 位 P P、
多传 感器数 据 自适应 加权 融合估 计算法
传感器、 光码盘组成 , 采用多传感 器信息融合技术 ,
道路环境的影响, 同时还受到诸如时钟误差 、 传播误 1 系统构建 差、 接收机 噪声等诸多 因素的影 响l .提高系统定 2 J 首先利用光码盘得到的数据通过航迹推算法得 位精度有很多途 径 , 例如 : 利用 G S结合 电子地图 ; P
利用 G S P 信号对野外环境 中的机器 人进行粗定位 , 到移动机器人 的车体位置 , 然后与 G S 方位传感器 P、
GS P接收器
l 经纬度 数据预处理 — 最终的车体位置
图 1 系统构成
ri. T e sse sr cur g1 h y tm tu t e
维普资讯
-
4 8・
天
津
理
工
大
学
学
报
第2 2卷
第 6期
智能化移动机器人系统的设计与控制
智能化移动机器人系统的设计与控制第一章:引言随着科技的不断进步,人们对人工智能和机器人等先进技术的需求逐渐增加。
智能化移动机器人系统作为一种典型的人工智能应用,其研发和应用受到了越来越多的关注和重视。
本文将详细探讨智能化移动机器人系统的设计和控制等方面,旨在为该领域的研究和应用提供一些有益的参考。
第二章:智能化移动机器人系统的组成智能化移动机器人系统由多个部分组成,包括机器人本体、传感器、控制器等。
在这些部分中,机器人本体是智能化移动机器人系统的核心组成部分。
机器人本体主要由底盘、摄像头、机械臂等组成。
传感器则主要包括激光雷达、摄像头、声纳、距离传感器等。
控制器则是整个智能化移动机器人系统的“大脑”。
控制器通过接收传感器捕捉到的数据和机器人本体的反馈信号来进行决策和控制。
第三章:智能化移动机器人系统的设计智能化移动机器人系统的设计是整个系统的关键。
设计的好坏直接影响系统的性能和稳定性。
设计时需要考虑的因素包括机器人本体的重量、形状、速度、功率以及传感器的种类和数量等。
同时还需要考虑传感器和控制器之间的信息传递速度,以及控制系统是否可以快速响应机器人的变化。
在设计智能化移动机器人系统时,需要确定机器人的目标和应用环境。
例如,若机器人用于室内清洁,则需要考虑机器人本体的大小,以便在狭小的空间内行走。
同时还需要考虑机器人本体的动力是否充足,以覆盖室内较大的面积。
如果机器人用于监测环境,则需要考虑传感器的种类和数量,以便获取与任务相关的数据。
第四章:智能化移动机器人系统的控制智能化移动机器人系统的控制是整个系统的关键。
控制系统需要实现机器人的自主导航和控制。
机器人的自主导航需要通过传感器获取周围环境的数据,然后通过控制器对机器人进行决策和控制。
同时,控制系统还需要具备自我学习的能力,以提高机器人的智能性。
在智能化移动机器人系统的掌控下,机器人可以行走、转向、提取和运载物品、进行信息传递、调整自身位置、检测和记录环境变化等。
论文--多传感器数据融合技术在移动机器人中的应用
智能信息处理技术论文论文题目:多传感器数据融合技术在移动机器人中的应用学院:自动化学院专业:控制理论与控制工程学号:XX:序号:多传感器数据融合技术在移动机器人中的应用摘要机器人多传感器数据融合是当今科学研究的热点问题。
综述了多传感器数据融合技术在移动机器人几个工作阶段中的应用。
指明了移动机器人领域中多传感器数据融合技术的开展趋势。
关键词移动机器人多传感器数据融合AbstractNowadays, the multi-sensor data fusion of robots is an intensive topicin scientific research. The application of multi-sensor data fusion technology in mobile robots' several sessions is described. At last, future development trends of this technology arealso presented.Key Wordmobile robot multi-sensor data fusion前言随着传感器种类的日益丰富和传感器技术的飞速开展,多传感器数据融合技术得到了越来越多的关注。
并且由于其在解决探测、跟踪和识别等问题上具有生存能力强,能够增强系统检测性能、可信度、鲁棒性和可靠性,可以提高测量数据精度,扩展系统的时间和空间覆盖X围[1]等优势,多传感器数据融合在军事、农业、工业等各个领域上的应用越来越频繁。
其中,数据融合技术在机器人研究领域的应用也正处在快速开展的阶段,特别是在移动机器人中,数据融合技术的应用就更为广泛了。
本文比拟分析了现有移动机器人上所应用的多传感器数据融合技术,并对未来移动机器人研究领域内数据融合技术的开展进展了合理的展望。
正文1 移动机器人技术简介移动机器人是一类能够通过传感器感知自身状态和周围环境,实现在复杂未知中面向目标的自主运动,并完成预定任务的机器人系统[2,3]。
基于多传感器融合的移动机器人SLAM

传感器 的漏检信息 ,以提高 多传感器 系统 的检测概 率。 如对属于同一特征的数据进行融合合成 , 还可 以 进一步提高特征的测量精度 。
多传感器数据 关联可以建立各 个传感器 测量数 据和特征源之间的对应关系, 并保证这种对应关 系在
值为 0 、方差为R 七 的高斯白噪声。 () 在 E FS A 中,将 厂. ̄ h. K —L M ( t ( 分别作线性化处 )T ) 理 , 并 假 设 所 有 的 分 布 都 为 高 斯 分 布 , 即 ) ~N( , ,其中 () () () ) ∑ k 、zk 分别为 k时刻
以位置不随 时间变化 ,即下式成 立 :
() ( 一1 。 k= k )
将 S A 问题 中 的运动 与观测 模型 看作是 一个 马 L M
尔可夫过程 ,即假定系统 k时刻的状态完全由 k ~1时 刻的信息所决定 ,这是运用概率方法处理 S A L M 的关键。机器人系统的运动方程如下 :
多著名学者认为是实现真正全 自主移动机器人的关键
。
据关联非常敏感 ,错误的关联不仅会影响机器人的定
位, 还会改变已建立的地图, 导致算法不一致和发散 。 好的数据关联算法要求准确度高、计算复杂度低 , 这两 项要求必须同时满足。 L M 问题中, SA 常用的数据关联
目前,扩展卡尔曼滤波器(xeddK la i r E t e a nFl , n m t e
Li ila g, S u i , Gu M ig i Ja e n in J unYo x a n x a, ingXu
(c o lfMeh ncl n l t n s n i ei ,h n o gU i ri S i c n cn lg , S h o o c a i d e r i gn r g S a d n nv sto c ne dT h ooy aa E c o c E e n e yf e a e
基于多传感器多目标实时跟踪视觉系统在全自主机器人上的应用

基于多传感器多目标实时跟踪视觉系统在全自主机器人上的应用摘要:视觉系统是全自主机器人的重要组成部分,而如何精确高效地处理视觉信息是视觉系统的关键问题。
介绍了一种基于彩色图像的目标识别与定位及避障方法,对全自主机器人感知环节进行了研究.通过分析摄像头采集的图像,并借助碰撞传感器、红外传感器等方法确定目标。
所提出的算法已在国内及国际比赛中应用,收到很好的效果。
关键词:全自主足球机器人;视觉系统;目标检测;红外测距全自主足球机器人比赛要求多个机器人活动在一个实时、噪声以及对抗性的复杂环境下,通过协作、配合朝向一个共同的目标(或完成复杂任务)。
它包括智能机器人系统、多智能体系统、实时图像处理与模式识别、智能体数据结构设计、实时规划和推理、移动机器人技术、机器传动与控制、传感器与数据融合和无线通讯等技术。
机器人足球比赛是近几年发展起来、进步较快且有很大研究潜力的一类。
这类机器人的视觉及控制器等各类部件均装载在机器人本体上,通过无线通讯与其它机器人、主控计算机及人的信息交流。
比赛过程中,机器人通过视觉系统搜索球及球门等环境信息,通过声纳、红外或激光等测距系统进行机器人全局定位及障碍物检测,在进行信息融合之后形成行动策略并实施。
因此机器人如何快速识别目标并且定位是比赛取胜的关键性环节,本文将对这方面的问题进行讨论。
1全自主型足球机器人视觉系统介绍1.1视觉系统的硬件组成实验中使用的足球机器人是上海广茂达伙伴机器人有限公司研制的AS-UII能力风暴智能机器人大学版。
它是典型的自主移动机器人,具有较高的自规划、自适应能力,适合于较复杂的非结构环境中工作的复杂系统。
机器人与计算机之间使用基于68HCll单片机开发的交互式C语言进行编程。
视觉系统采用CMUcam视觉系统:CMUcam视觉模块主要是由1个SX28微处理器与OV6620摄像头(CMOS)组成,CMOS摄像头把当前窗口的视图通过简单的处理,返回像素点矩阵。
《移动机器人》课件-第3章 移动机器人传感器
• 随机噪声信号:随机噪声主要来源于MEMS传感器上的控制转换电路的
电路噪声、机械噪声和传感器工作时的环境噪声。随机噪声信号带来的
误差会严重影响传感器的测量精度。使用扩展卡尔曼滤波可以获得最优
状态估计,降低噪声的影响,从而提高传感器的测量精度。
路、通信和电源为一体的完整微型机电系统。
MEMS传感器主要优点:体积小、重量轻、功耗低、可靠性高、灵敏度高、
易于集成等,用MEMS工艺制造传感器、执行器或者微结构,具有微型化、
集成化、智能化、成本低、效能高、可大批量生产等特点,产能高,良品
率高。
如图是亚德诺半导体公司Analog Devices Inc.(简称ADI)推出一种经典
• 对移动机器人来说,内部传感器是用于测量移动机器人自身状态
的功能元件,并将所测得的信息作为反馈信息送至控制器,形成
闭环控制。内部传感器主要检测移动机器人的行程及速度、倾斜
角等。常用的移动机器人内部传感器包括:
• 编码器
• 陀螺仪
• 惯性测量单元IMU
移动机器人
4
3.2 内部传感器
• 3.2.1 编码器
主要由光栅盘和光电检测装置构成,分为增量式编码器、绝对式编码器。
移动机器人
7
3.2 内部传感器
• 3.2.1 编码器
2. 光学编码器
• 增量式编码器
增量式编码器可以记录编码器在一个绝对坐标系上的位置。
右图是光电式增量编码器的结构原理图。
结构中最大的圆盘上刻有分布均匀的辐射状窄缝,窄缝分
布的周期为节距。当圆盘随着被测轴转动时,检测窄缝不
难导致成本高昂,这使得早期的惯导系统造价高。
《基于STM32移动机器人目标动态追踪的研究》范文
《基于STM32移动机器人目标动态追踪的研究》篇一一、引言随着人工智能和机器人技术的不断发展,移动机器人在各个领域的应用越来越广泛。
其中,目标动态追踪技术是移动机器人实现自主导航和智能控制的关键技术之一。
本文旨在研究基于STM32的移动机器人目标动态追踪技术,以提高机器人的智能化水平和应用范围。
二、研究背景及意义目标动态追踪技术是移动机器人实现自主导航和智能控制的重要技术之一。
在工业、军事、医疗、安防等领域,目标动态追踪技术都有着广泛的应用。
然而,传统的目标追踪方法往往存在算法复杂度高、实时性差、鲁棒性不足等问题。
因此,研究基于STM32的移动机器人目标动态追踪技术,具有重要的理论和实践意义。
STM32是一款基于ARM Cortex-M内核的微控制器,具有高性能、低功耗、易于集成等特点。
将其应用于移动机器人目标动态追踪中,可以有效地提高机器人的智能化水平和应用范围。
同时,通过对STM32的优化和改进,可以进一步提高机器人的实时性和鲁棒性,为机器人技术的进一步发展提供重要的技术支持。
三、相关技术及原理1. 移动机器人技术移动机器人技术是机器人技术的重要组成部分,涉及到机械设计、电子技术、控制技术等多个领域。
移动机器人的运动控制主要通过控制器实现,其中STM32等微控制器是常用的控制器之一。
2. 目标追踪技术目标追踪技术是利用传感器和图像处理等技术,对目标进行检测、跟踪和识别的技术。
常用的目标追踪方法包括基于滤波的方法、基于特征的方法、基于深度学习的方法等。
3. 基于STM32的目标追踪原理基于STM32的目标追踪原理主要包括传感器数据采集、图像处理和运动控制三个部分。
首先,通过传感器采集目标的位置和运动信息;其次,通过图像处理技术对目标进行检测和跟踪;最后,通过STM32控制器对机器人的运动进行控制,实现目标的动态追踪。
四、系统设计与实现1. 系统设计本系统主要由STM32控制器、摄像头、电机驱动器等部分组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
移 动机器 人 多传 感器 的实时动态测试 与控 制
戴 娟 .胡 鹏
( 明 理 工大 学 机 电工 程 学 院 ,云 南 昆 明 昆 609) 5 0 3
摘 要 :在 对 移 动 机 器 人 自动 导 航 、 碍 回避 以及 多传 感 器 系 统 研 究 的基 础 上 . 计 了一 种 用 于移 动机 器 人 自动 导 航 障 设
原理 和设 计过 程进 行 了分析 .
1 超 声 波传 感 器 的 工 作 原 理
超 声 波是人 耳 听不 见 的一种 机械 波 , 频率 在 2 Hz以上 .超声 波 波长 短 、 0k 绕射 小 , 作为 声 波射线 并 定 可
向传播 . 动机 器人 的超 声传 感 器主要 用 于对 周 围物体 的探 测 与测距 .超声 测距 一般 采用 渡 越时 间法 . : 移 即
维普资讯
第 2 0卷 第 2期
20 0 6年 6月
河
海
大
学
常
州
分
校
学
报
Vo12 No2 .0 .
J 0URNAL OF HOHAI UN VERS T I I Y CHANGZ H0U
Jn 0 6 u .2 o
文 章 编 号 : 0 9 3 ( 0 6 0 — 01 - 4 1 0 —1 0 2 0 ) 2 0 8 0 1
2 多传 感器 测试 系 统 的硬 件 设 计
测试 系 统 的硬件 结 构 如 图 1 示 . 所 系统 主要 由多路 超 声信 号 数 据采 集 模块 、 数据 分 析 处理 模 块 和 C AN
收 稿 日期 :2 0 — 0 1 0 5 1— 0 基0 ) T大 1 0 8 51
的 多 传感 器 阵 列实 时动 态 测 试 分 析 与 控 制 系 统 .系 统 利 用 数 字 信 号 处 理 器 ( S ) 片 内 I 0 端 E 和其 他 外 围设 置 . D P的 / l
简 化 外 围 电路 设 计 . 过 C N 总 线 完 成超 声数 据 与 上位 机 通 信 . 现 对 多 路 超 声 传 感 器 的 实 时 动 态 监 测 和控 制 .试 通 A 实 验 运 行 表 明 系 统 可 解决 移 动机 器 人 的 自动 导 航 、 靠 站 等精 确定 位 和 避 障 的 问题 . 停 关 键 词 :移 动 机 器 人 ;多传 感 器 阵列 ; 动态 测 试 ; 控 制 系 统
D =C / t2 () 1
式 中 : 为移 动机 器人 与被 测 障碍物 之 间 的距 离 : D C为声 波 在介 质 中 的传输 速 率 ;为 从超 声发 射 到超 声 返 回 t
的 时间 间隔 , 即传播 时 间或 “ 越 时 间” 渡 .超声 传感 器 由超 声 发射 器 、 超声 接 受 器 、 时 电路 和控 制 电路 组 成. 定 其工作 原理是 : 首先 由超声 发射 器 向被测 物体方 向发 射脉 冲式 的超声 波 , 发 出一连 串超声 波后 即 自行 关 闭 ; 在 在发射 超声 波的 同时超声 接 受器开 始检测 回声 信号 . 时电路 也开 始计 时 , 定 当接 收到 回声信 号后 , 时电路 停 定 止计 时 . 此时定 时 电路记 录的 时间 , 是从 发射超 声波 开始 到收 到 回声 波信号 的传 播 时间 t然后 由式 ( ) 算 便 ; 1计 出被测 物体 到 超声传 感 器之 间 的距离 [. 2 3
作 者 简 介 :戴 娟 (9 8 , , 苏 南 京 人 , 级 工 程 师 , 要 从 事 机 械 工 程 与 自动 化 、 器 人 技 术 方 面 的研 究 1 5 一)女 江 高 主 机
维普资讯
第 2 0卷第 2期
戴 娟 . 等 移 动 机 器 人 多 传 感 器 的 实 时 动 态测 试 与 控制
中图 分 类 号 :T 2 P4 文 献 标 识 码 :A .
移 动 机器 人 只有 具备 自动导 航 功能 才 能在 未 知 和不确 定 的环境 下 运 行 . 传感 器 在移 动 机器 人 的导航 系 统 中起 着 十分 重要 的作 用 . 觉 、 视 激光 、 红外 、 声传 感器 等技 术在 移 动机 器人 的研 究 中得到 了广 泛应 用.其 超 中 , 声传 感 器可 实现 移动 机器 人 的精确 导航 [2 通 过多传 感 器 阵列 中 每个传 感 器 的响应 信 息 , 超 1] -. 可精 确 解决 移动机器人的路径导引 、 定位 和避 障等 问题 .传统 的移 动机 器人 的超声 数据 采 集 系统 大多 采用 单 片机 作 为 微处 理 器 . 以此来 测量 移动 机器 人 到 障碍物 的距 离 . 并将 距 离通 过 串 口传输 到 上位 机 . 对 于 实时 性要 求较 但 高 的 多超 声传感 器 导航 系统 。 果仍 采用 单 片机 来 完成 测距 任 务 . 如 则需 要 多个 单 片机 才能 完 成数 据 采 集 . 容 易 造 成采 集 系统设 计 复 杂和 延续 算 法难 以实现 等缺 陷 .随着 微 电子 工业 的发展 . 字信 号 处理 器 DS 数 P的应 用 领域 已从 通信 领 域拓 展到 工业 控制 领域 .D P具 有 非 常强 大 的片 内 I 0端 口和其 他外 围设 置 . S / 利用 DS P 可 以简化 外 围电路 设计 . 降低 系统 成 本.基 于这 种思 想 . 者研 究 并设 计 了一 种用 于 移动 机器 人 的多 传感 器 作 实 时动 态测 试 与控 制 系统 . 并对 通 过 C AN总线 完 成 的超 声 数据 与 上 位 机 ( 器 人 中央 控 制 器 ) 间 的通 信 机 之