西门子6RA70参数设置剖析共24页文档
西门子6RA70直流调速器参数设置

西门子6RA70直流调速器参数设置1 概述西门子SIMOREG DC Master 6RA70 系列直流调速器,以其优越的调速性能、强大的功能组合、合理的结构设计、经久耐用等优点,被广泛的应用于机床直流主轴电动机的驱动控制上。
本机床采用的是1P6RA7081-6DV62-0的调速器,被驱动的直流电动机型号为:LAK4200-B额定功率为:132kW 速度反馈用的是直流模拟测速发电机,型号:RE.O444RTIB 0.06 CA。
该驱动的参数设置,通过安装在调速器柜门上的简易操作面板PMU进行。
PML上有3个按键分别是:P键(用来切换驱动状态和参数显示、报警信息的应答以及在参数显示时在参数号、参数值和编址值之间的切换、确认现有报警信息。
P+△键组合用于将故障和报警信息切换到背景,P+?荤将故障和报警信息切换到PMU勺5位7段LED 显示板上),上升键△(用来增加参数的数值和显示更高的参数号,当已经显示最高参数号时,再次按压该键将显示最低参数号),下降键?荦(用来减少参数的数值和显示更低的参数号,当已经显示最低参数号时,再次按压该键将显示最高参数号)。
调速器当前的状态由5位7段LED和RUN录色LED(运行)、READ潢色(准备好)、FAULT 红色(故障)3个指示灯来显示。
2 参数设置2.1通过简易操作面板PMU勺参数设置步骤参数化是通过操作面板更改参数值,从而激活调速器的相关功能或者显示测量值勺过程。
调速器勺基本参数分为:可调参数P,只读参数r,和内部参数n, U。
参数设置只涉及到可调参数P。
参数类型共有三种:(1 )显示参数。
例如:电枢实际电流,电流调节器给定值与实际偏差等等。
显示勺参数为只读值,不能修改。
(2)设定参数:既作为显示量,又作为修改量。
例如:电动机勺额定电枢电压,电动机勺热过载时间常数,以及速度调节器勺积分时间等等。
(3)编址参数:既可以作为显示量,又可以作为改变赋值给同一参数编号勺几个参数值勺量。
西门子6ra70故障调试与参数设置
西门子(SIEMENS)6ra70调试故障(Ⅱ)八. 优化电枢和励磁电流环优化将励磁,控制,风机电源投入装置内控状态下在PMU上选择P051=25整流装置进入07.0或07.1状态等待操作柜门上选择关输入合闸命令和解封命令,当装置状态<01.0时,执行优化运行开始,优化过程要保证电机锁死,优化运行结束时,驱动装置回到07.2状态.整个过程大约40S。
电流限幅将不起作用, 电流峰值与电机额定电流有关.以下参数自动被设置:- P110 P111:电枢回路电阻,电感- P112:励磁回路电阻- P155 P156:电枢电流调节器P,I增益- P255 P256:励磁电流调节器P,I增益- P826:自然换相时间的校正电流环优化前设定P159=0.01,P160=0(缺省值),优化结束后,重新定义P159,P160为如下数值,保证SCR正反桥可靠换向。
以后电流环优化前需将两个参数恢复工厂缺省值。
P159=0.2 电枢自动翻转的转换阈值%P160=0.02 附加的无转矩时间间隔S速度环优化将励磁,控制,风机电源投入在电枢反馈方式下启动电机,检查观察R024参数,保证正向速度给定与实际轧制方向一致,RO24参数应和P402给定值一致。
将P140=1,切换到编码器反馈试车。
编码器脉冲信号正常的情况下,停车后修改P080=0,P083=2,P140=1,P143=电机基速,启动电机,装置内控状态下在PMU上选择P051=26整流装置进入07.0或07.1状态等待操作柜门上选择关输入合闸命令和解封命令,装置状态<01.0时,执行优化运行开始,优化运行结束时,驱动装置回到07.2状态.整个过程大约6S。
电机以45%的额定电枢电流加速,达到20%的最大电机速度,速调优化得到P225,P226,P228。
这种优化在带上机械负载后必须重新做(因为最高转速值有大的变化)!记录调试结果。
九. 励磁电流调整启动电机,运行至20%,50%,80%的速度,观察R038(电枢电压),R037 (EMF实际值显示)根据理论计算值与实际值比较,调整P102参数,完成励磁电流的标定。
6RA70简单参数

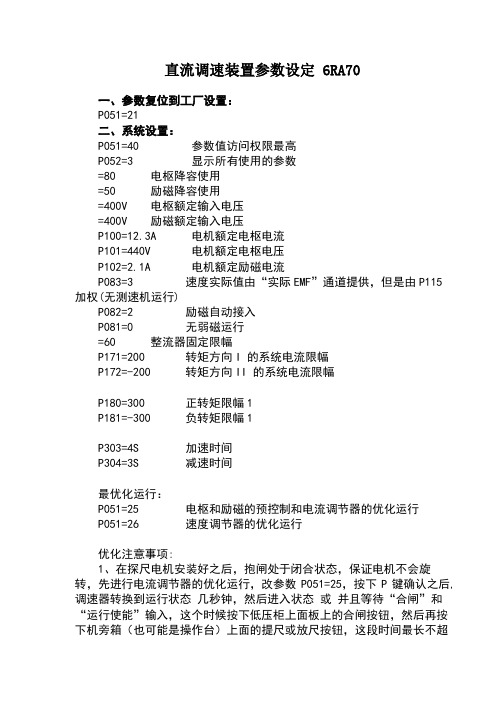
直流调速装置参数设定 6RA70一、参数复位到工厂设置:P051=21二、系统设置:P051=40 参数值访问权限最高P052=3 显示所有使用的参数P076.01=80 电枢降容使用P076.02=50 励磁降容使用P078.01=400V 电枢额定输入电压P078.02=400V 励磁额定输入电压P100=12.3A 电机额定电枢电流P101=440V 电机额定电枢电压P102=2.1A 电机额定励磁电流P083=3 速度实际值由“实际EMF”通道提供,但是由P115 加权(无测速机运行)P082=2 励磁自动接入P081=0 无弱磁运行P150.F=60 整流器固定限幅P171=200 转矩方向I 的系统电流限幅P172=-200 转矩方向II 的系统电流限幅P180=300 正转矩限幅1P181=-300 负转矩限幅1P303=4S 加速时间P304=3S 减速时间最优化运行:P051=25 电枢和励磁的预控制和电流调节器的优化运行P051=26 速度调节器的优化运行优化注意事项:1、在探尺电机安装好之后,抱闸处于闭合状态,保证电机不会旋转,先进行电流调节器的优化运行,改参数P051=25,按下P键确认之后,调速器转换到运行状态o7.4 几秒钟,然后进入状态o7.0 或o7.1 并且等待“合闸”和“运行使能”输入,这个时候按下低压柜上面板上的合闸按钮,然后再按下机旁箱(也可能是操作台)上面的提尺或放尺按钮,这段时间最长不超过30秒,调速器在得到“合闸”和“运行使能”命令后,PMU上的运行状态显示的十位闪烁,表示正在执行优化,优化过程大约20-40秒。
2、P051=26是速度调节器的优化运行,这个过程电机会进行旋转,时间很短,只有2-5秒钟,步骤与第一步相同。
可采取以下办法,将电机抱闸完全打开,将钢丝绳完全松开,这样电机处于自由状态,探尺重锤的重力加在电机上,因为无法确定优化时电机转向,这样做可以不用考虑电机如何旋转。
6RA70装置参数设置

6RA70装置参数设置●恢复工厂设置P051=0参数无访问权P051=21恢复工厂设置P970=0 恢复工厂设置P051=40参数有访问权P052=0显示改变参数P052=3显示所有参数●调整整流器额定电流P076.001=额定电枢电流百分比P076.002=额定励磁电流百分比●调整整流器供电电压P078.001=电枢回路供电电压P078.002=励磁回路供电电压●电机基本数据P100=电枢额定电流P101=电枢额定电压P102=额定励磁电流P103=最小励磁电流(通常为0.1倍P102)●实际速度检测数据P083=1使用模拟测速机***P083=2使用脉冲编码器P140=编码器类型(通常为1:不带零位相位差90度的二通道编码器)P141=单位脉冲数P142=编码器电压选择(0为5V,1为15V)P143=最大运行速度***P083=3无测速机运行(EMF控制)●SBPU791=1 :15V 0:5VU792=脉冲数U793=0(A/B型)1(正反通道型)编码器类型U794=参考转速●励磁数据P081=1励磁减弱激活P082=1励磁回路与主接触器一起合闸P082=2 P257设置的停机励磁自动接入●电机优化步骤首先驱动装置必须运行在O7.0或O7.1-→接下来选择P051-→P051=25电枢和励磁的预控制和电流调节器的优化P051=26速度调节器的优化P051=27励磁减弱优化P051=28摩擦和转动惯量补偿的优化P051=29具有摆动机构的传动系统的速度调节器的优化然后输入合闸和运行使能-→整流器达到<O1.0(运行)时,执行优化运行注意:1.P051=25电机接最终负载2.P051=26P200=速度调节器实际值滤波时间P236=动态响应程度电机接最终负载3.P051=27电机无负载4.P051=28电机接最终负载优化完成后必须手动设置P223=1,使摩擦和转动惯量补偿有效●通讯参数设置P918=DP地址P927=参数化使能(一般为7)●应用参数设置P081=1励磁减弱激活P082=1励磁回路与主接触器一起合闸P083=2编码器P083=3 EMFP084=1速度闭环控制P084=2电流/转矩闭环控制P169:P170【控制方式选择】0 0 电流闭环控制和电流限幅0 1 带转矩限幅的转矩闭环控制,电流限幅另外起作用1 0 带转矩限幅的电流闭环控制,电流限幅另外起作用P171=转矩方向1电流限幅P172=转矩方向2电流限幅P180=转矩方向1转矩限幅P181=转矩方向2转矩限幅P303=加速时间1P304=减速时间1P305=初始圆弧1P306=最终圆弧1P433=K3003 主给定P605=K3004 转矩限幅P648=K3001 控制字1P649=K3002 控制字2P637=B3202 急停控制位●抱闸控制设置P80=1(停机抱闸)/2(工作抱闸)P370=Nmin 最小速度设置P771=B250 开关量的输出●软化控制设置Y:P227=0% P552=10%X: P558=0% P561=100%P562=50% P563=-50%P630=K162 软化量的源P555=K3006 软化度(X)的源●通信控制设置U734.001=K32U734.002=K33U734.003=K167 速度反馈U734.004=K107 电流反馈U734.005=K191 加速反馈(注意P542=加速度标么时间)U734.006=K38(转速RPM)/K39(转速16384)P637:P638斜坡源选择0 0 斜坡1有效【P303-P306】0 1 斜坡2有效【P311-P314】1 0 斜坡3有效【P307-P310】P637=B0010【X171:34,36数字信号】作为急停斜坡选择P820=故障屏蔽U580=换向监控U722=1#CB通信警报取消●参数显示R015进线电枢电压R016进线励磁电压R019电枢实际电流R041显示P042的连接器R043显示P044的连接器R045显示P046的连接器●装置状态显示点对点控制<G-SST2>接线方式选2,最后一个装置终端电阻ON P927=111 <通讯允许>P790=5 <选择点对点>P793=9 <波特率设置>P791=3 <传输的字数>P795_i001=0<终端电阻OFF>P795_i002=0<BIT10不受PLC控制>P816=B0001<通讯收允许>P817=B0001<通讯发允许>主机:P794_i001=K40/K179 <主机速度反馈>【编码器反馈/速度反馈滤波值】P794_i002=K148 <主机速度调节器的转矩给定>P794_i003=K3004 <主机转矩限幅>从机:P609=K6001<P083=4> <从机速度接收>P500=K6002<P084=2> <从机速度调节器的转矩给定接受>P605=K6003 <从机转矩限幅接受>接线:1.装置对装置式2.点对点串行式3.点对点并行式4.点对点总线式注意:总线式给定值源传动用”传送使能”=1,其它所有的传动必须设定”传送使能”=0。
西门子直流控制器6RA70主从控制

西门子直流控制器6RA70主从控制工程论文2009-08-31 17:43:23 阅读93 评论0 字号:大中小1.西门子直流控制器6RA70简介目前,随着交流调速技术的发展,交流传动得到了迅猛的发展,但直流传动调速在诸多场合仍有着大量的应用。
随着计算机技术的发展,过去的模拟控制系统正在被数字控制系统所代替。
在带有微机的通用全数字直流调速装置中,在不改变硬件或改动很少的情况下,依靠软件支持,就可以方便地实现各种调节和控制功能,因而,通用全数字直流调速装置的可靠性和应用的灵活性明显优于模拟控制系统。
目前,以德国SIEMENS公司的6RA70系列通用全数字直流调速装置在中国的应用最为广泛。
1.1结构及工作方式SIMOREG 6RA70系列整流装置为三相交流电源直接供电的全数字控制装置,其结构紧凑,用于可调速直流电机电枢和励磁供电,装置额定电枢电流范围为15至2000A,额定励磁3到85A,并可通过并联SIMOREG整流装置进行扩展,并联后输出额定电枢电流可达到12000A。
6RA70直流控制器已经广泛应用与各行业,控制器器的核心器件上已经在国内外得到可靠实例的证实,可靠性、安全方面较有保障。
根据不同的应用场合,可选择单象限或四象限工作的装置,装置本身带有参数设定单元,不需要其它的任何阻力。
设备即可完成参数的设定。
所有的控制、调节、监视及附加功能都由微处理器来实现。
可选择给定值和反馈值为数字量或模拟量。
SIMOREG 6RA70系列整流装置特点为体积小,结构紧凑。
装置的门内装有一个电子箱,箱内装入调节板,电子箱内可装用于技术扩展和串行接口的附加板。
各个单元很容易拆装使装置维修服务变得简单、易行。
外部信号连接的开关量输入/输出,模拟量输入、输出,脉冲发生器等,通过插接端子排实现。
装置软件存放闪(Flash)-EPPOM,使用基本装置的串行接口通过写入可以方便地更换。
1.2功率部分:电枢和励磁回路电枢回路为三相桥式电路:(1)单象限工作装置的功率部分电路为三相全控桥B6C。
西门子6ra70故障调试与参数设置
西门子(SIEMENS)6ra70调试故障(Ⅱ)八. 优化电枢和励磁电流环优化将励磁,控制,风机电源投入装置内控状态下在PMU上选择P051=25整流装置进入07.0或07.1状态等待操作柜门上选择关输入合闸命令和解封命令,当装置状态<01.0时,执行优化运行开始,优化过程要保证电机锁死,优化运行结束时,驱动装置回到07.2状态.整个过程大约40S。
电流限幅将不起作用,电流峰值与电机额定电流有关.以下参数自动被设置:- P110 P111:电枢回路电阻,电感- P112:励磁回路电阻- P155 P156:电枢电流调节器P,I增益- P255 P256:励磁电流调节器P,I增益- P826:自然换相时间的校正电流环优化前设定P159=0.01,P160=0(缺省值),优化结束后,重新定义P159,P160为如下数值,保证SCR正反桥可靠换向。
以后电流环优化前需将两个参数恢复工厂缺省值。
P159=0.2 电枢自动翻转的转换阈值%P160=0.02 附加的无转矩时间间隔S速度环优化将励磁,控制,风机电源投入在电枢反馈方式下启动电机,检查观察R024参数,保证正向速度给定与实际轧制方向一致,RO24参数应和P402给定值一致。
将P140=1,切换到编码器反馈试车。
编码器脉冲信号正常的情况下,停车后修改P080=0,P083=2,P140=1,P143=电机基速,启动电机,装置内控状态下在PMU上选择P051=26整流装置进入07.0或07.1状态等待操作柜门上选择关输入合闸命令和解封命令,装置状态<01.0时,执行优化运行开始,优化运行结束时,驱动装置回到07.2状态.整个过程大约6S。
电机以45%的额定电枢电流加速,达到20%的最大电机速度,速调优化得到P225,P226,P228。
这种优化在带上机械负载后必须重新做(因为最高转速值有大的变化)!记录调试结果。
九. 励磁电流调整启动电机,运行至20%,50%,80%的速度,观察R038(电枢电压),R037(EMF实际值显示)根据理论计算值与实际值比较,调整P102参数,完成励磁电流的标定。
6RA70简单参数
直流调速装置参数设定 6RA70一、参数复位到工厂设置:P051=21二、系统设置:P051=40 参数值访问权限最高P052=3 显示所有使用的参数=80 电枢降容使用=50 励磁降容使用=400V 电枢额定输入电压=400V 励磁额定输入电压P100=12.3A 电机额定电枢电流P101=440V 电机额定电枢电压P102=2.1A 电机额定励磁电流P083=3 速度实际值由“实际EMF”通道提供,但是由P115 加权(无测速机运行)P082=2 励磁自动接入P081=0 无弱磁运行=60 整流器固定限幅P171=200 转矩方向I 的系统电流限幅P172=-200 转矩方向II 的系统电流限幅P180=300 正转矩限幅1P181=-300 负转矩限幅1P303=4S 加速时间P304=3S 减速时间最优化运行:P051=25 电枢和励磁的预控制和电流调节器的优化运行P051=26 速度调节器的优化运行优化注意事项:1、在探尺电机安装好之后,抱闸处于闭合状态,保证电机不会旋转,先进行电流调节器的优化运行,改参数P051=25,按下P键确认之后,调速器转换到运行状态几秒钟,然后进入状态或并且等待“合闸”和“运行使能”输入,这个时候按下低压柜上面板上的合闸按钮,然后再按下机旁箱(也可能是操作台)上面的提尺或放尺按钮,这段时间最长不超过30秒,调速器在得到“合闸”和“运行使能”命令后,PMU上的运行状态显示的十位闪烁,表示正在执行优化,优化过程大约20-40秒。
2、P051=26是速度调节器的优化运行,这个过程电机会进行旋转,时间很短,只有2-5秒钟,步骤与第一步相同。
可采取以下办法,将电机抱闸完全打开,将钢丝绳完全松开,这样电机处于自由状态,探尺重锤的重力加在电机上,因为无法确定优化时电机转向,这样做可以不用考虑电机如何旋转。
如果不具备这些条件,本步骤可以省略。
3、数字输入端子定义(参考图纸):X171:37:合闸(设备默认)X171:38:运行使能(设备默认)三、参数设定:=K0401 提尺力矩限幅源=K0402 放尺力矩限幅源=B0010切换力矩限幅的源(B0010放尺端子)P401=40 提尺力矩限幅实际值P402=10 放尺力矩限幅实际值=K0230 力矩限幅的源P403=40 力矩给定实际值=K0001 选择力矩给定源=K0403 力矩给定源数字输出端子:X171:46,47: P771=B0106 开关量输出1的输出值的源故障X171:48,54: P772=B0104 开关量输出2的输出值的源运行注意:调速器在运行时有可能会有报警信息,如A301和A305,不用理会。
6RA70直流调速装置调试参数说明
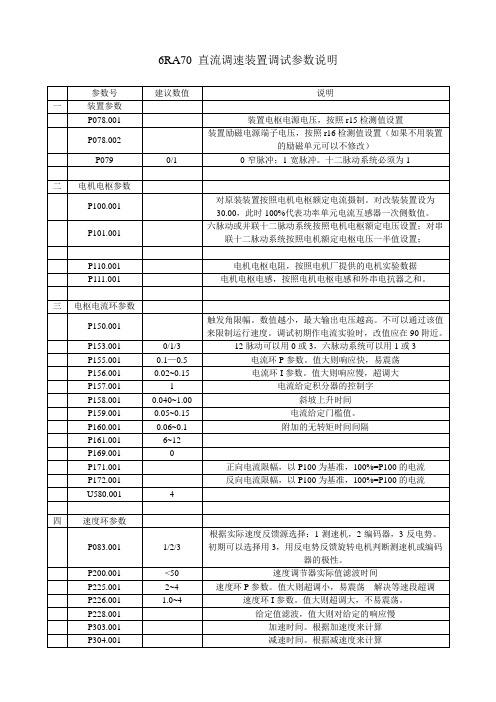
6RA70 直流调速装置调试参数说明
1、必须先检查硬件接线,确认正确。
特别是串联或并联的电枢极性。
2、第一次送电应该保证电枢回路为开路状态,快开为分断状态,不能直接接到电动机。
3、上电正常后应先做小电流电压试验:根据装置的输出电压在直流回路侧接若干个串联在一起的灯泡,
修改电流环输入P601.001=0401,限制P150.001>90,修改P401.001数值使稍大于P159+0.05,监视r018数值,启动、使能,观察r018的变化情况,该数值应向小变化,并最终达到P150定义的限幅值并稳定。
若正常,则调整P150数值减小,观察电枢电压表的变化情况。
随着P150数值的减小,电枢电压逐渐增加。
正常后可将P401的数值改为相反方向,按照上面的步骤观察另一组的工作情况,并做好记录。
在相同电枢输入电压下,对正反组桥来说,触发角相同,输出的直流电压是一致的。
同时记录好电枢电压的极性。
4、然后作电流实验:建议快开主触点为分断状态,用总截面积不大于20mm2的导线短接快开主触点。
P150限制住触发角,建议不小于85,限制电枢电流P171、P172。
按照上面步骤由P401输入电流给定,依次按比例增加,记录r18、r19、r20数值,观察给定电流与反馈电流及触发角的关系,以导线承载电流为限。
在相同的给定下,正反组整流桥触发角应一致,实际电流应一致。