某组合机床的电气控制系统设计
基于PLC的液压传动组合机床电气控制系统设计

表2 I/O端子分配表
输 入
输 入 设 备
输入端子
输 出 输 出负 载 输 出 端 子
SAl SA2 FR1
10.O 10.1 10-2
KM 1 KM2 l(=M3
QO.O Q0.1 QO.2
FR2 SB1 SB2
10-3 10.4 10.5
YV1 YV2 YV3
及软件设计 ,提供了主要的硬件 原理图和软件 程序 。
关键 词 : 可编程序控 制器 ;组合机床 ;控制系统
中图分类号 :TP273
文献标识码 :A
文章编号 :1 009—01 34(201 2)06(下)一0064—03
Doi:1 0.3969/J.issn.1 009-01 34.201 2.6(下 ).22
(1.郑州工业安全职业学院 机 电工程系 。郑州 451150;2.济源职业技术学 院 电气系 。济源 454650) 摘 要 : 本文设计 了一种以德国西 门子公司的微型可编 程序控制器 (PLC)为核心 的控制系统 ,以替
代组合机床 上原有的继 电控 制线路 ,实现 了对组合机床控 制系统的改造 。分 析了系统 的硬 件
I1 4
SQ8 回 KP2
I1.5
Q0.7
一 __= /一 — I1.6
L+ 1M
2M M
24V .
2L l
I
FU2
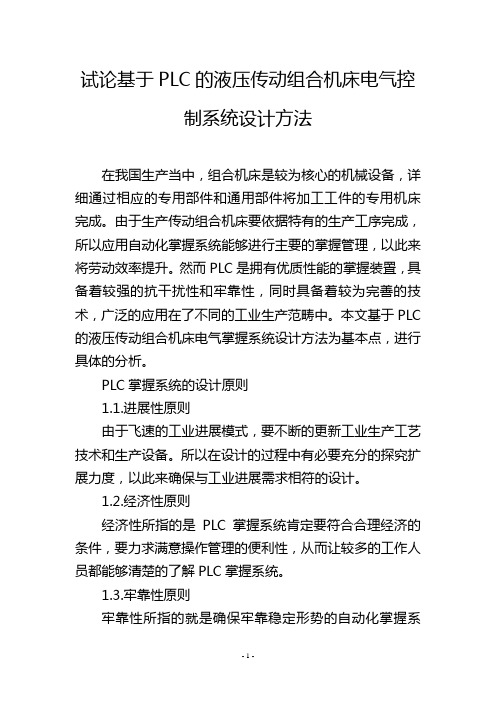
图 3 PLC的 I/O端 子 接 线 图
第34卷 第6期 2012—6(下 ) [651
务l 匐 化
网络 1Q0 . 1
白凸白 换 得 到 ,转 换 过 程 中应 注 意 以
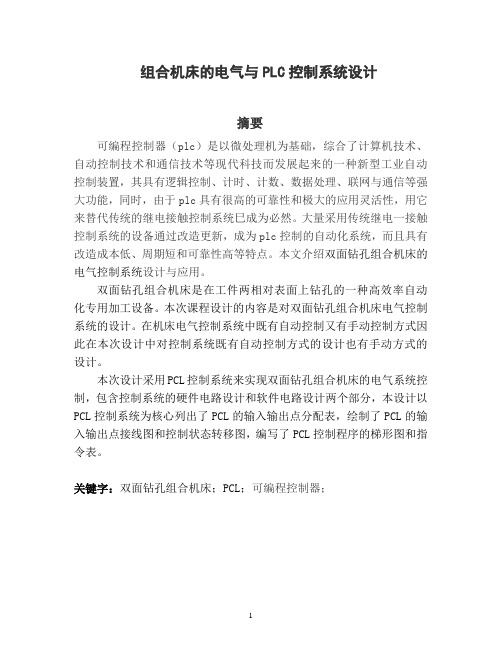
图2 左 右 动 力 头 的 工 作 循 环 示 意 图
基于PLC的组合机床控制系统设计
基于PLC的组合机床控制系统设计摘要组合机床是一种集多种加工方式于一身的高端智能化设备。
本文基于PLC平台,设计和实现了一套组合机床控制系统,以实现多种加工方式的联合操作。
在系统设计中,首先对组合机床的结构和工作原理进行了详细分析和描述,随后选择合适的PLC控制器,根据系统控制需求,编写程序实现各种加工作业的自动控制和监控。
通过仿真实验,验证了系统的稳定性和实用性,结果表明该系统可以支持多种加工方式的组合操作,同时保证加工质量和工作效率的提高。
AbstractCombined machine tool is a high-end intelligent equipment that integrates multiple processing methods. Based on the PLC platform, this paper designs and implements a set of combined machine tool control system to realize the joint operation of multiple processing methods. In the system design, the structure and working principle of the combined machine tool are analyzed and described in detail. Then the appropriate PLC controller is selected, and the program is written according to the system control requirements to realize automatic control and monitoring of various processing tasks. Through simulation experiments, thestability and practicality of the system are verified. The results show that the system can support the combined operation of multiple processing methods while ensuring the improvement of processing quality and work efficiency.关键词:组合机床;PLC控制;加工质量;工作效率;仿真实验Keywords: combined machine tool; PLC control; processing quality; work efficiency; simulation experiment一、研究背景随着工业技术的快速发展,组合机床逐渐成为了制造业领域中的重要设备。
组合机床控制系统设计安装与调试

组合机床控制系统设计安装与调试学校: 姓名:1、组合机床概述两个位钻孔、攻丝组合机床, 能自动完成工件钻孔和攻丝加工, 自动化程度高, 生产效率高。
机床关键由床身、移动工作台、钻孔滑台、钻孔动力头、攻丝滑台、攻丝动力头、滑台移动控制凸轮系统等组成, 如图1所表示。
图1 两工位钻孔攻丝组合机床示意图移动工作台用以完成工件移动, 实现自动加工。
钻孔滑台和钻孔动力头, 用以实现钻孔加工量调整和钻孔加工。
攻丝滑台和攻丝动力头, 用以实现攻丝加工量调整和攻丝加工。
工作台移动(左移和右移)由电动机正反转控制; 钻孔滑台移动(上移和下移)直接由钻孔主轴电机(单向)拖动凸轮机构实现自动进给和退刀控制; 攻丝滑台移动(上移和下移)直接由攻丝主轴电机正、反转拖动凸轮机构实现自动进给和退刀控制。
2、加工工艺及控制要求若机床各部分在原位(工作台在钻孔工位 SQ1 动作, 钻孔滑台在原位 SQ2 动作, 攻丝滑台在原位 SQ4动作)。
若不在原位则需手动回原位。
将工件放在工作台上, 手工夹紧。
按下开启按钮, 开启钻孔动力头电机 M1正转, 且由凸轮机构带动钻孔动力头自动进给, 进行钻孔加工。
当钻孔滑台抵达终点时, 钻孔滑台自动后退, 到原位时停, M1同时停止。
等到钻孔滑台回到原位后, 工作台左/右移电动机M3正转使工作台右移, 当工作台到攻丝工位时, 限位开关SQ3动作, 工作台停止。
开启攻丝动力头电机M2正转, 攻丝滑台开始前移, 进行攻丝加工, 当攻丝滑台到终点时(终点限位 SQ5动作), 5S 后攻丝动力头电机 M2反转, 同时攻丝滑台由控制凸轮控制使其自动后退。
攻丝电动机由变频器拖动实现变频调速, 运行曲线如图2所表示。
(加速时间1.5S, 减速时间1S)0··图2 攻丝主轴电机运行曲线当攻丝滑台后退到原位时, 攻丝动力头电机M2停止, 延时3S后工作台左/右移电动机M3反转, 工作台左移, 到钻孔工位时停。
基于PLC的六工位组合机床的控制系统设计

© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved.
2009年第 7期
·控制与检测 ·
钻 、扩 、铰等滑台动作的各位置信号和各设备动作的返 回信号 (接触器的辅助常开触点 ) ;输出端连接控制各 台电动机动作的接触器线圈和控制液压系统工作的各 电磁阀线圈 。
The D esign of Con trol System of M ulti2sta tion M odular M ach ine Tool Ba sed on PLC XUN Qun2de1 , YAN G Chao2jun1 , WANG Hong2rui2 , YU J ian2yong 1 , YE Zhen1
2009年第 7期
·控制与检测 ·
文章编号 : 1001 - 2265 (2009) 07 - 0053 - 04
基于 PLC的六工位组合机床的控制系统设计
荀群德 1 ,杨超君 1 ,王宏睿 2 ,禹建勇 1 ,叶镇 1
(1. 江苏大学 机械工程学院 ,江苏 镇江 212013; 2. 南京工程学院 机械工程学院 ,南京 211167)
试论基于PLC的液压传动组合机床电气控制系统设计方法
试论基于PLC的液压传动组合机床电气控制系统设计方法在我国生产当中,组合机床是较为核心的机械设备,详细通过相应的专用部件和通用部件将加工工件的专用机床完成。
由于生产传动组合机床要依据特有的生产工序完成,所以应用自动化掌握系统能够进行主要的掌握管理,以此来将劳动效率提升。
然而PLC是拥有优质性能的掌握装置,具备着较强的抗干扰性和牢靠性,同时具备着较为完善的技术,广泛的应用在了不同的工业生产范畴中。
本文基于PLC 的液压传动组合机床电气掌握系统设计方法为基本点,进行具体的分析。
PLC掌握系统的设计原则1.1.进展性原则由于飞速的工业进展模式,要不断的更新工业生产工艺技术和生产设备。
所以在设计的过程中有必要充分的探究扩展力度,以此来确保与工业进展需求相符的设计。
1.2.经济性原则经济性所指的是PLC掌握系统肯定要符合合理经济的条件,要力求满意操作管理的便利性,从而让较多的工作人员都能够清楚的了解PLC掌握系统。
1.3.牢靠性原则牢靠性所指的就是确保牢靠稳定形势的自动化掌握系统,避开由于性能的不稳定而造成的进度特别。
1.4.完整性原则完整性也就是在较大的限度上确保生产机械的整体性条件下开展的必要设计,PLC掌握系统需要满意于工业生产的需求,也就是工业生产针对掌握系统所提出的需求要和PLC掌握系统设计模式相符。
设计PLC掌握系统的主要步骤2.1.调试程序调试程序基本包含两大阶段,其一为模拟调试;其二为现场调试。
程序的模拟调试主要指的是,用便捷的模拟形式构成现场的实际状态,可以将程序运行放在首位而设置出肯定的环境状态。
根据现场信号的产生方式,模拟的调试包含软件模拟和硬件模拟两种方法。
2.2.应用程序的编写编写应用程序方面是能够让自动化掌握管理被PLC掌握系统实现的主要过程。
全部的掌握动作都要依据编程来开展。
所以,在编写应用程序的过程中,没有必要将编写作用在工业生产要求的条件下,要明确不同工序当中的掌握功能都可以充分的达成。
四工位组合机床的plc控制系统设计 正文

正文第一章绪论一、组合机床概述组合机床是针对特定工件,进行特定加工而设计的一种高效率自动化专用加工设备,这类设备大多能多刀同时工作,并且具有自动循环的功能。
组合机床是随着机械工业的不断发展,由通用机床、专用机床发展起来的。
通用机床一般用一把刀具进行加工,自动化程度低、辅助时间长、生产效率低,但通用机床能够重新调整,以适应加工对象的变化。
专用机床可以实现的多刀切削,自动化程度较高,结构较简单,生产效率也较高。
但是,专用机床的设计,制造周期长,造价高,工作可靠性也较差。
专用机床是针对某工件的一定工序设计的,当产品进行改进,工件的结构,尺寸稍有变化时,它就不能继续使用。
在综合了通用机床、专用机床优点的基础上产生了组合机床。
组合机床通常由标准通用部件和加工专用部件组合构成,动力部件采用电动机驱动或采用液压系统驱动,由电气系统进行工作自动循环的控制,是典型的机电或机电液一体化的自动加工设备。
常见的组合机床,标准通用部件有动力滑台各种加工动力头以及回转工作台等,可用电动机驱动,也可用液压驱动。
各标准通用动力部件组合构成一台组合机床时,该机床的控制电路可由各动力部件的控制电路通过一定的连接电路组合构成。
多动力部件构成的组合机床,其控制通常有三方面的工作要求:第一方面是动力部件的点动和复位控制。
第二方面是动力部件的半自动循环控制。
第三方面是整批全自动工作循环控制。
组合机床具有生产率高、加工精度稳定的优点。
因而,在汽车、柴油机、电机、机床等一些具有一定生产批量的企业中得到了广泛应用。
目前,组合机床的研制正向高效、高精度、高自动化和柔和性化方向发展。
本文所用组合机床为四工位组合机床,该机床由四个滑台,各载一个加工动力头,组成四个加工工位,除了四个加工工位外,还有夹具,上下料机械手和进料器,四个辅助装置以及冷却和液压系统共14个部分。
机床的四个加工动力头同时对一个零件的四个端面以及中心孔进行加工,一次加工完成一个零件,由上料机械手自动上料,下料机械手自动取走加工完成的零件,零件每小时可加工80件。
基于PLC的组合机床控制系统设计

基于PLC的组合机床控制系统设计摘要组合机床是高度机电一体化的产品,是现代机床技术水平的重要标志,是现代机械制造业重要标志,是现代制造业的基础装备,尤其是在加工产品更换频繁、零件形状复杂、精度要求较高的工件时,不但可以节省大量的时间和资源,而且还能够确保工件的质量与产量,进而提高生产效率,具有良好的经济性。
传统的机床主要采用继电器--接触器进行控制,其缺点是故障率高、可靠性差、维修工作量大等,而采用PLC组成的控制系统可以很好地解决上述问题。
本文在基于可编程控制器(PLC)的结构和工作原理的基础上,介绍了基于PLC的加工中心控制系统的总体方案设计,重点介绍了加工中心控制系统中的硬件选择方法、软件的设计过程,并给出了系统组成框图和程序流程图,提出了西门子PLC 的编程方法,列出了具体的主要硬件电路、加工中心的控制梯形图及指令表,解决了继电器——接触器故障率高、可靠性差、安装调试周期长、维修工作量大、接线复杂等缺点。
关键词:组合机床,继电器—接触器,PLC,控制系统Based on a combination of the plc toolsto monitor system designABSTRACTBuilding-block machine is a highly integrated mechanical and electrical products, is an important indicator of the level of modern technology ,is an important symbol of modern machinery manufacturing industry ,is the basis of modern manufacturing equipment, especially in the frequent replacement of processed products, spare parts of complex shape, the accuracy requirements are more stringent than work piece high, not only can save a lot of time and resources, but also to ensure the quality and output of the work piece, thus improving production efficiency, has a good economy.The main use of the traditional machine tool relay - contactor control, the drawback is the high failure rate, poor reliability,heavy workload of maintenance, consisting of the use of PLC control system can solve these problems. In this paper, based on the programmable logic controller (PLC) of the structure and working principle, based on the introduction of the PLC-based control system for machining center's overall program design, focuses on the machining center control system hardware selection, software design process and gives the system flow chart diagram and procedures, put forward a Siemens PLC programming methods, a list of specific hardware circuit, the control processing center table ladder and instructions to solve the relay - contacts high failure rate, reliability, poor long-term installation, maintenance workload and the complexity of wiring and other shortcomings.KEY WORDS: Building-block machine, the relay - contactor, PLC, control system目录前言 (1)第1章组合机床的概述 (3)1.1组合机床的发展史 (3)1.2 组合机床的加工方式 (4)1.3 组合机床的特点与未来发展 (4)1.3.1 组合机床的特点 (4)1.3.2组合机床的未来发展 (4)第2章可编程序控制器 (6)2.1 PLC的应用与特点 (6)2.1.1 PLC的应用 (6)2.2.2 PLC的特点 (7)2.2 PLC的工作原理 (8)第3章控制系统的方案设计 (10)3.1组合机床控制系统的工艺流程图及设计要求 (10)3.2根据工艺过程分析控制要求 (11)3.2.1加工过程分析: (11)3.2.2操作方式 (12)第4章控制系统硬件设计 (13)4.1选择PLC机型 (13)4.2 S7-200 PLC的简要介绍 (14)4.3控制系统PLC的输入/输出分配表 (16)4.4PLC硬件连接图 (19)第5章控制系统软件设计 (20)5.1控制流程图设计 (20)5.2梯形图的分解阐述 (22)第6章仿真模拟 (28)结论 (29)谢辞 (30)参考文献 (31)附录 (32)外文资料翻译 (39)前言随着科学技术的发展,近年来我国的机械生产技术得到飞速的发展,一些机械设备制造厂商也在不断地改进设计,修改工艺,生产新型的机械制造设备,组合机床就是其中之一。
组合机床的电气与PLC控制系统设计
组合机床的电气与PLC控制系统设计摘要可编程控制器(plc)是以微处理机为基础,综合了计算机技术、自动控制技术和通信技术等现代科技而发展起来的一种新型工业自动控制装置,其具有逻辑控制、计时、计数、数据处理、联网与通信等强大功能,同时,由于plc具有很高的可靠性和极大的应用灵活性,用它来替代传统的继电接触控制系统巳成为必然。
大量采用传统继电一接触控制系统的设备通过改造更新,成为plc控制的自动化系统,而且具有改造成本低、周期短和可靠性高等特点。
本文介绍双面钻孔组合机床的电气控制系统设计与应用。
双面钻孔组合机床是在工件两相对表面上钻孔的一种高效率自动化专用加工设备。
本次课程设计的内容是对双面钻孔组合机床电气控制系统的设计。
在机床电气控制系统中既有自动控制又有手动控制方式因此在本次设计中对控制系统既有自动控制方式的设计也有手动方式的设计。
本次设计采用PCL控制系统来实现双面钻孔组合机床的电气系统控制,包含控制系统的硬件电路设计和软件电路设计两个部分,本设计以PCL控制系统为核心列出了PCL的输入输出点分配表,绘制了PCL的输入输出点接线图和控制状态转移图,编写了PCL控制程序的梯形图和指令表。
关键字:双面钻孔组合机床;PCL;可编程控制器;目录第1章设计目的要求和概述 (3)1.1 设计目的 (3)1.2 双面钻孔组合机床的概述 (3)1.3设计要求与任务分配 (3)第2章双面钻孔组合机床的控制要求 (5)2.1 双面钻孔组合机床的工作流程 (5)2.2电动机控制要求 (5)2.3 机床动力滑台、工件定位装置、夹紧装置控制要求 (6)第 3 章 PLC的简介与选择 (8)3.1 PLC (8)3.2 PLC简介 (8)3.3 PLC的结构及基本配置 (8)3.4 PLC选择 (9)第4章双面钻孔机床左机钻孔顺序动作PLC控制 (10)4.1 双面钻孔组合机床的左机钻孔自动控制PLC输入输出点分配 (10)4.2状态继电器的分配 (10)第5章双面钻孔组合机床的PLC控制实现 (14)5.1 并行分支状态转移 (14)5.2 PLC控制考虑上双面钻孔组合机床的手动方式控制 (14)第6章总结 (21)参考文献 (22)第1章设计目的要求和概述1.1 设计目的1、培养学生综合分析和解决本专业的一般工程技术问题的独立工作能力,拓宽和深化学生的知识。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电气控制及PLC 课程设计说明书题目:某组合机床的电气控制系统设计专业班级:自动1206姓名:陈文浩学号: 2指导教师:任胜杰目录1 系统概述 (2)2 方案论证 (3)3 硬件设计 (6)3.1系统的原理方框图 (6)3.2 主电路 (6)3.3 I/O分配 (10)3.3 I/O接线图 (11)3.4 元器件选型 (11)4 软件设计 (13)4.1主流程 (13)4.2梯形图 (15)5 系统调试 (16)设计心得 (18)参考文献 (19)附电气控制原理图 (20)1 系统概述组合机床是以通用部件为基础,配以按工件特定形状和加工工艺设计的专用部件和夹具,组成的半自动或自动专用机床。
组合机床一般采用多轴、多刀、多工序、多面或多工位同时加工的方式,生产效率比通用机床高几倍至几十倍。
由于通用部件已经标准化和系列化,可根据需要灵活配置,能缩短设计和制造周期。
因此,组合机床兼有低成本和高效率的优点,在大批、大量生产中得到广泛应用,并可用以组成自动生产线。
组合机床一般用于加工箱体类或特殊形状的零件。
加工时,工件一般不旋转,由刀具的旋转运动和刀具及工件的相对进给运动,来实现钻孔、扩孔、锪孔、铰孔、镗孔、铣削平面、切削内外螺纹以及加工外圆和端面等。
有的组合机床采用车削头夹持工件使之旋转,由刀具作进给运动,也可实现某些回转体类零件(如飞轮、汽车后桥半轴等)的外圆和端面加工。
随着PLC控制技术日益成熟并得到越来越广泛的应用,利用原有的继电器—接触器控制电路设计PLC控制系统,或直接进行PLC控制系统的设计,都能很好地满足组合机床自动化控制的要求。
本次设计的要求如下:##图1.1如图所示为某一组合机床的示意图,左面为1#箱体移动式动力头。
主轴电机M1为5.5KW、1440转/分钟,1#箱体的进给电机为M3为1.5KW、1450转/分钟,工进及快进采用电磁铁YV1(DC24V,10W)进行切换;右面为2#箱体移动式动力头。
主轴电机M2为5.5KW、1440转/分钟,2#箱体的工作进给电机为M4,为1.5KW、1450转/分钟,工进及快进采用电磁铁YV2(DC24V,10W)进行切换。
SQ1为左动力头的原位限位,SQ3为左动力头的快进限位,SQ5为左动力头的工进限位,SQ2为右动力头的原位限位,SQ4为右动力头的快进限位,SQ6为右动力头的工进限位,具体要求如下:1.左、右两动力头均要求快进→工进→快退的工作循环。
2.可使左、右两动力头同时工作,也可进行单独调整。
3.加工过程中需要进行冷却。
4.应有电源有信号指示,动力头正在工作信号指示。
5.应有局部照明必要的保护环节。
2 方案论证组合机床的电气控制,理论上讲,可以采用继电器接触器电气控制系统,单片机控制系统和PLC控制系统来实现。
但是在实际工程中往往选择一种经济、有效、性能优越的控制方案,考虑到上述几点,PLC较适合组合机床的电气控制。
PLC及单片机、继电器-接触器控制系统相比具有以下优点:1.PLC及继电器-接触器相比较:继电器-接触器控制系统自上世纪二十年代问世以来,一直是机电控制的主流。
由于它的结构简单、使用方便、价格低廉,所以使用广泛。
它的缺点是动作速度慢,可靠性差,采用微电脑技术的可编程顺序控制器的出现,使得继电接触式控制系统更加逊色。
PLC等取代继电接触式控制逻辑。
具体如下:(1) 控制逻辑继电接触式控制系统采用硬接线逻辑,它利用继电器等的触点串联、并联、串并联,利用时间继电器的延时动作等组合或控制逻辑,连线复杂、体积大、功耗也大。
当一个电气控制系统研制完后,要想再做修改都要随着现场接线的改动而改动。
特别是想要能够增加一些逻辑时就更加困难了,这都是硬接线的缘故。
所以,继电接触式控制系统的灵活性和扩展性较差。
可编程控制器采用存储逻辑。
它除了输入端和输出端要及现场连线以外,而控制逻辑是以程序的方式存储在PLC的内存当中。
若控制逻辑复杂时,则程序会长一些,输入输出的连线并不多。
若需要对控制逻辑进行修改时,只要修改程序就行了,而输入输出的连接线改动不多,并且也容易改动,因此,PLC的灵活性和扩展性强。
而且PLC是由中大规模集成电路组装成的,因此,功耗小,体积小。
(2) 控制速度继电器接触式控制系统的控制逻辑是依靠触点的动作来实现的,工作频率低。
触点的开闭动作一般是几十毫秒数量级。
而且使用的继电器越多,反映的速度越慢,还是容易出现触点抖动和触点拉弧问题。
而可编程控制器是由程序指令控制半导体电路来实现控制的,速度相当快。
通常,一条用户指令的执行时间在微秒数量级。
由于PLC内部有严格的同步,不会出现抖动问题,更不会出现触点拉弧问题。
(3) 定时控制和计数控制:继电接触式控制系统利用时间继电器的延时动作来进行定时控制。
用时间继电器实现定时控制会出现定时的精度不高,定时时间易受环境的湿度和温度变化而影响。
有些特殊的时间继电器结构复杂,维护不方便。
而可编程程序控制器使用半导体集成电路作为定时器,时基脉冲由晶体震荡器产生,精度相当高并且定时时间长,定时范围广。
(4) 可靠性和维护性。
继电接触式控制系统使用了大量的机械触点,连线也多。
触点在开闭时会受到电弧的损坏,寿命短。
因而可靠性和维护性差。
PLC采用微电子技术,大量的开关动作由无触点的半导体电路来完成,可靠性高。
PLC还配备了自检和监控功能,能自诊断出自身的故障,并随时显示给操作人员,还能动态的监视控制程序的执行情况,为现场调试和维护提供了方便。
总之,PLC在性能上均优越于继电接触式控制系统,特别是控制速度快,可靠性高,设计施工周期短,调试方便,控制逻辑修改方便,而且体积小,功耗低。
2.PLC及单片机比较单片机具有结构简单,使用方便,价格比较便宜等优点,一般用于数据采集和工业控制。
但是,单片机不是专门针对工业现场的自动化控制而设计的,所以它及PLC比较起来有以下缺点:(1) 单片机不如PLC容易掌握使用单片机来实现自动控制,一般要使用微处理器的汇编语言编程。
这就要求设计人员要有一定的计算机硬件和软件知识。
对于那些只熟悉机电控制的技术人员来说,需要进行相当长一段时间系统地学习单片机的知识才能掌握。
而PLC采用了面向操作者的语言编程,如梯形图、状态转移图等,对于使用者来说,无需了解复杂的计算机知识,而只要用较短时间去熟悉PLC的简单指令系统及操作方法,就可以使用和编程。
(2) 单片机不如PLC使用简单使用单片机来实现自动控制,一般要在输入输出接口上做大量的工作。
例如,要考虑工程现场及单片机的连接,输出带负载能力、接口的扩展,接口的工作方式等。
除了要进行控制程序的设计,还要在单片机的外围进行很多硬件和软件工作,才能及控制现场连接起来,调试也较繁琐。
而PLC的输入/输出接口已经做好,输入接口可以及无外接电源的开关直接连接,非常方便。
输出接口具有一定的驱动负载能力,能适应一般的控制要求。
而且,在输入接口、输出接口,由光电耦合器件,使现场的干扰信号不容易进入PLC。
(3) 单片机不如PLC可靠使用单片机进行工业控制,突出的问题就是抗干扰性能较差。
而PLC是专门用于工程现场环境中的自动控制,在设计和制造过程中采取了抗干扰性措施,稳定性和可靠性较高。
通过上面的比较,针对组合机床的电气控制系统,虽然PLC的价格高一些,但良好的稳定性和高度的可靠性可确保机床在加工零件时的精度,所以决定采用PLC控制系统来实现。
3 硬件设计3.1系统的原理方框图图3-1 系统框图3.2 主电路根据设计要求,主电路大致分为三个部分。
首先看第一部分,主轴电机。
主轴电机工作方式有两种:正转、反转。
根据不同的工作要求,主轴电机的转向不同。
因主轴电机的功率较小,故可以直接启动。
其主电路图如下3-2所示:图3-2主轴电机当KM1、KM2的线圈得电吸合分别使电机M1、M2正转;当KM9、KM10的线圈得电吸合分别是电机M1、M2反转。
通过PLC的输出就可以使不同的接触器线圈得电,从而使电机的转向不同。
其次看第二部分,快速电机和进给电机。
根据设计要求知左、右两动力头均要求快进→工进→快退的工作循环,并且左、右两动力头可以同时工作,也可进行单独调整。
所以就要求快速电机M5、M6能够正反转,工作进给电机为M3、M4能够正转即可。
其主电路如下图3-3所示。
M3K M 3F U 3M4K M 4FU4Y V 1Y V 2图3-3 快速电机和进给电机因为这4个功率都较小,所以可以直接启动。
M3、M4只要接触器KM3、KM4的线圈得电就会吸合,就能正转;M5、M6分别当接触器KM5、KM6线圈得电时正转,当接触器KM7、KM8分别得电就反转。
最后看第三部分,照明电路和信号指示部分。
当机床工作时,为了警告旁人不要误动作,故要有信号指示说明,告诉别人正在进行工作,不要误动作。
信号指示也能显示机床是否是在正常工作、有无问题。
有时候需要晚上工作,所以需要必要的照明。
图3-4 指示信号灯如图3-4,其指示着组合机床的工作状态,指示灯分别及及之对应的接触器的常开触点连接,当接触器的线圈得电,其常开触点闭合,通过6.3V电压使之亮。
KM1、KM9分别是控制M1的正反转的接触器;KM2、KM10分别是控制M2的正反转的接触器;KM3、KM4分别是控制左右工进电机正转的接触器;KM5、KM7,KM6、KM8分别是左右快进快退电机。
这样就可以把所有的电机的状态显示出来。
照明灯如下图3-5所示。
图3-5 照明灯3.3 I/O分配因采用PLC控制,需分配其I/O点,它决定着系统如何工作。
表3-1 I/O口地址分配表3.3 I/O接线图图3-6 PLC I/O接线图接触器的线圈通过接110V电压及PLC的输出端和COM端相连。
按钮和开关及输入端和COM端相连。
3.4 元器件选型首先是PLC的选择。
统计组合机床PLC输入元器件、执行元器件及I/O点数:输入部分输出部分注:照明不需要接入PLC,只需要选择开关就可以。
所以选用FX2N―32MR加扩展单元FX2N―32ER,FX2N―32MR含有32个I/O点(16入,16出),FX2N―32ER为含有32点扩展单元。
下面是电器元件选择。
代号名称型号及规格用途数量M1三相交流异步电动机JO3-802-6 5.5KW 380V1440r/min主电动机 1M2三相交流异步电动机JO3-802-6 5.5KW 380V1440r/min主电动机 1M3三相交流异步电动机JO3-802-6 1.5KW 380V1450r/min快速工进电动机 1M4三相交流异步电动机JO3-802-6 1.5KW 380V1450r/min快速工进电动机 1M5三相交流异步电动机JO3-802-6 5.5KW 380V1440r/min左冷却泵 1M6三相交流异步电动机JO3-802-6 5.5KW 380V1440r/min右冷却泵 1FU1 熔断器RL1-15 15A主电动机过载保护1 FU2 熔断器RL1-15 15A主电动机过载保护1 FU3 熔断器RL1-15 15A 快速工进电动机 1过载保护快速工进电动机FU4 熔断器RL1-15 15A1过载保护左冷却泵过载保1 FU5 熔断器RL1-15 15A护右冷却泵过载保FU6 熔断器RL1-15 15A1护KM1 交流接触器CJ10-75A 线圈电压220V 控制M1正转 1 KM2 交流接触器CJ10-40A 线圈电压220V 控制M2正转 1 KM3 交流接触器CJ10-40A 线圈电压220V M3工进 1 KM4 交流接触器CJ10-40A 线圈电压220V M4工进 1 KM9 交流接触器CJ10-40A 线圈电压220V 控制M1反转 1 KM10 交流接触器CJ10-40A 线圈电压220V 控制M2反转 1 YV1 电磁铁DC24V,10W 控制M3快进 1 YV2 电磁铁DC24V,10W 控制M4快进 1 FR1 热继电器JR10-60 52.5A M1过载保护 1 FR2 热继电器JR10-60 52.5A M2过载保护 1 FR3 热继电器JR10-10 *14 7.20A M3过载保护 1 FR4 热继电器JR10-10 *14 7.20A M4过载保护 1 FR5 热继电器JR10-60 52.5A M5过载保护 1 FR6 热继电器JR10-60 52.5A M6过载保护 1 SB1 按钮黑色M1正转 1 SB2 按钮黑色M1反转 1 SB3 按钮M2正转 1 SB4 按钮黑色M2反转 1 SB5 按钮黑色M3工进 1 SB6 按钮黑色M3快进 1 SB7 按钮黑色M4工进 1 SB8 按钮黑色M4快进 1SB9 按钮黑色左冷却泵 1 SB10 按钮黑色右冷却泵 1 SQ 位置开关LA2 黑色 6图3.4.3电器元件数量、型号表4 软件设计4.1主流程根据要求知需使左、右两动力头均要求快进→工进→快退的工作循环和可使左、右两动力头同时工作,也可进行单独调整。