A机器人的IO通信
机器人通信介绍与IO回顾

(2)工业生产现场的粉尘、易燃易爆和有毒气体的存在,需要采取防爆措施,保证安全生产。 (3)工业生产现场的震动、电磁干扰大,工业控制网络必须具有机械环境适应性(如耐震动、耐冲 击)、电磁环境适应性或电磁兼容性(Electro Magnetic Compatibility,EMC)等。 (4)工业网络器件的供电通常是采用柜内低压直流电源标准,大多的工业环境中控制柜内所需的电 源为低压直流24V。 (5)采用标准导轨,安装方便,适用于工业环境安装的要求。工业网络器件要能方便的安装在工业 现场控制柜内,并容易更换 工业以太网应用于工业自动化中的关键问题: (1)通信实时性问题。 (2)对环境的适应性与可靠性的问题 (3)总线供电 (4)本质安全
一、工业自动化中常见通讯介绍:
3.工业以太网的简单介绍
随着信息技术的不断发展,信息交换技术覆盖了各行各业。在自动化领域,越来越多的企业需要建 立包含从工厂现场设备层到控制层、管理层等各个层次的综合自动化网络管理平台。建立以工业控制 网络技术为基础的企业信息化系统。
工业以太网的设计制造必须充分考虑并满足工业网络应用的需要。工业现场对工业以太网产品的需 求包括以下几个方面:
三菱PLC中485拓展模块
一、工业自动化中常见通讯介绍:
-Link
CC-Link是控制与通讯链路系统的简称,可以同时高速处理控 制和信息数据。1996年,三菱电机以“多厂家设备环境、高性能、 省配线”理念开发、公布和开放了现场总线CC-Link。CC-Link具 有性能卓越、用途广泛、使用简单、节省成本等突出优点。CCLink的数据容量大,通信速度多级可选择,是一个复合的、开放 的、适应性强的网络系统,能够适应从较高的管理层网络到较低 的传感器层网络的不同范围。
工业机器人IO通信

在智能家居中,工业机器人可以应用于家庭安全监控、智能清洁、家庭娱乐等多种场景。
随着智能家居市场的不断扩大,工业机器人IO通信的应用场景也将越来越广泛。
自动化生产线:工业机器人IO通信可以实现自动化生产线的控制和监测,提高生产效率和产 品质量。
物流仓储:工业机器人IO通信可以实现智能仓储和物流配送,提高物流效率和降低成本。
安全防护:工业机器人IO通信可以实现安全防护和监控,保障工厂和设备的安全。
智能家居:工业机器人IO通信可以实现智能家居设备的互联和控制,提高家庭生活的便利性 和舒适度。
工业机器人IO通信 发展趋势
工业机器人IO通信 发展趋势
工业机器人IO通信 协议
定义:串行通信协议是一种数据传输协议,通过串行方式逐位传输数据。 特点:简单、可靠、成本低,适用于短距离、低速数据传输。 应用场景:工业控制、智能制造等领域。 常见协议:RS-232、RS-485等。
并行通信协议定义 并行通信协议应用场景
并行通信协议特点 并行通信协议优缺点
域
定义:模拟IO接口是一种将模拟信号转换为数字信号的接口,用于实现工业机器人与 外部设备的通信和控制。
类型:模拟IO接口通常分为输入接口和输出接口,分别用于接收外部设备的信号和向 外部设备发送信号。
工作原理:模拟IO接口通过将模拟信号转换为数字信号,实现工业机器人与外部设备 之间的信息交换。在转换过程中,需要对信号进行采样、量化、编码等处理。
IO通信速度的提升
高速IO通信技术的 应用
IO通信速度提升对 工业机器人性能的 影响
工业机器人IO通信的可靠性是影响其性能的关键因素,随着技术的发展,IO通信的可靠性得到了显著提高。
abb机器人的硬件连接和io通信完整课件2024新版

。
对于特殊需求,可能需要定制或改造现有硬件以满足特定功能
03
或性能要求。
02 IO通信原理及协议
IO通信基本概念
输入/输出(I/O)通信
指机器人与外部设备之间的数据传输,包括数字信号和模拟信号 的传输。
通信接口
机器人与外部设备连接的物理接口,如RS232、RS485、Ethernet 等。
通信协议
规定机器人与外部设备之间数据传输的格式和规则。
常见IO通信协议
Modbus协议
一种串行通信协议,广泛应用于工业 自动化领域,支持多种物理接口。
Profinet协议
一种基于Ethernet的工业自动化通信 协议,具有高带宽、实时性强的特点 。
EtherCAT协议
一种实时以太网通信协议,具有高精 度同步和低延迟特性,适用于高性能 机器人控制。
掌握基本维修技能
具备基本的电子维修技能,如焊接、更换电 子元件等,以便在必要时进行维修。
定期检查和保养
按照制造商的建议,定期对机器人进行检查 和保养,以预防潜在故障的发生。
06 案例分析与实践操作演 示
案例一
机器人控制柜与抓取装置之间的连接
通过电缆连接控制柜与抓取装置,实现电源供应和信号传输。
传感器与执行器的连接
感谢您的观看
THANKS
无线连接
采用蓝牙、Wi-Fi等无线 通信技术,提高灵活性但 可能增加信号干扰和延迟 。
接口类型
包括USB、Ethernet、 CAN等,不同接口适用于 不同通信需求和场景。
硬件配置与选型
01
根据机器人应用场景和需求选择合适的控制器、电机、传感器 和执行器等硬件。
02
考虑硬件之间的兼容性和通信协议,确保各组件能够协同工作
AJA机器人的IO通信

A J A机器人的I O通信集团标准化小组:[VVOPPT-JOPP28-JPPTL98-LOPPNN]A B B[a]-J-4A B B机器人的I O通信4.1任务目标了解ABB机器人I/O通信的种类。
掌握常用ABB标准I/O板的配置。
掌握Profibus适配器与PLC进行通信的配置方法。
4.2任务描述以ABB 标准I/O板DSQC651为模块,模块单元为board10,总线连接DeviceNet1,地址为10,创建数字输入信号DI1、数字输出信号DO1、组输入信号GI1(4位)、组输出信号GO1(4位)和模拟输出信号AO1,并实现I/O信号的监控及操作。
除了通过ABB机器人提供的标准I/O板进行与外围设备进行通信以外,ABB机器人还可以使用DSQC667模块通过Profibus与PLC进行快捷和大数据量的通信。
如何连接ABB03-5Profibus适配器?4.3知识储备机器人I/O通信种类机器人提供了丰富的I/O通信接口,可以轻松地实现与周边设备进行通信。
ABB机器人PC现场总线ABB标准RS232通信OPCserver SocketMessage1DeviceNet2Profibus2Profibus-DP2Profinet2EtherNetIP2标准I/O板PLC….….….注注2:不同厂商推出的现场总线协议关于ABB机器人的I/O通信接口的说明:1)ABB的标准I/O板提供的常用信号处理有数字输入di、数字输出do、模拟输入ai、模拟输出ao、以及输送链跟踪,在本章中会对此进行介绍。
2)ABB机器人可以选配标准ABB的PLC,省去了原来与外部PLC进行通信设置的麻烦,并且在机器人示教器上就能实现与PLC相关的操作。
3)在本章中,以最常用的ABB标准I/O板DSQC651和Profibus-DP为例,进行详细的讲解如何进行相关的参数设定。
IRC5控制柜接口说明:标号说明A附加轴,电源电缆连接器(不能用于此版本)B FlexPendant连接器C I/O连接器D安全连接器E电源电缆连接器F电源输入连接器G电源连接器H DeviceNet连接器I信号电缆连接器J信号电缆连接器K轴选择器连接器L附加轴,信号电缆连接器(不能用于此版本)控制柜接口示意图:标准I/O板本节将介绍常用的ABB标准I/O板(具体规格参数以ABB官方最新公布为准)。
工业机器人IO通信

任务一:机器人的发展史
ABB工业机器人控制柜 ABB工业机器人接口
X1:电源
X6:WAN
X2:服务器端口(连接PC)
X7:面板
1
X3:LAN1
X9:轴计算机
X4:LAN2
X10:USB端口
X5:LAN3
X11:USB端口
2
RS232串口及调试端口
3
工业通信总线接口
4
标配DeviceNet总线板
5
存储插槽及SD存储卡,标配2GB
0V 24V
X2端子说明
地址分配
8 9 10 11 12 13 14 15
任务二:使用机器人的I/O通信
DSQC652板模块接口连接
X3端子说明见表:
X3端子编号 1 2 3 4 5 6 7 8 9 10
使用定义
OUTPUT CH1 OUTPUT CH2 OUTPUT CH3 OUTPUT CH4 OUTPUT CH5 OUTPUT CH6 OUTPUT CH7 OUTPUT CH8
X5端子说明
例:如果想要获得模块地址10,可将第8脚和第10脚 的跳线剪去,2+8=10,就可以获得10的地址。
获得模块地址
任务二:使用机器人的I/O通信
I/O信号配置过程
ABB标准I/O板安装完成后,需要对各信号进行一系列设置后才能在软件中使 用,设置过程称为I/O配置。
ABB标准I/O板DSQC652是最常用的模块。下面以创建数字输入信号DI、数字输出信号DO、 组输入信号GI、组输出信号GO和模拟输出信号AO为例进行详细介绍。
地址分配
0 1 2 3 4 5 6 7
任务二:使用机器人的I/O通信
DSQC652板模块接口连接
Fanuc机器人IO接口和UIUO接口配置

Fanuc机器人IO接口和UIUO接口配置Fanuc机器人提供了多种IO接口和UIUO接口配置选项,以满足不同用户的需求。
在本文档中,我们将介绍Fanuc机器人IO接口和UIUO接口的配置方法。
IO接口配置Fanuc机器人的IO接口用于与外部设备进行通信,如传感器、执行器等。
以下是Fanuc机器人IO接口配置的步骤:1. 打开Fanuc机器人的控制面板,并进入IO接口配置菜单。
2. 在菜单中选择要配置的IO接口编号。
Fanuc机器人通常有多个IO接口可供选择。
3. 根据需要配置每个IO接口的输入和输出端口。
输入端口用于接收外部设备的信号,输出端口用于向外部设备发送信号。
4. 配置每个端口的信号类型和参数。
根据外部设备的要求,选择适当的信号类型和参数设置。
5. 完成配置后,保存并退出IO接口配置菜单。
UIUO接口配置Fanuc机器人的UIUO接口用于与用户界面设备进行通信,如操作面板、触摸屏等。
以下是Fanuc机器人UIUO接口配置的步骤:1. 打开Fanuc机器人的控制面板,并进入UIUO接口配置菜单。
2. 在菜单中选择要配置的UIUO接口编号。
Fanuc机器人通常有多个UIUO接口可供选择。
3. 根据需要配置每个UIUO接口的输入和输出端口。
输入端口用于接收用户界面设备的信号,输出端口用于向用户界面设备发送信号。
4. 配置每个端口的信号类型和参数。
根据用户界面设备的要求,选择适当的信号类型和参数设置。
5. 完成配置后,保存并退出UIUO接口配置菜单。
需要注意的是,Fanuc机器人的IO接口和UIUO接口的配置可能因机型和软件版本而有所不同。
请参考Fanuc机器人的用户手册或咨询Fanuc技术支持,以获得详细的配置指导。
以上就是Fanuc机器人IO接口和UIUO接口配置的简要介绍。
希望本文档能对您的工作有所帮助。
如有其他问题,请随时与我们联系。
A机器人的IO通信

ABB [a]-J-4ABB机器人的10通信任务目标了解ABB机器人I/O通信的种类。
掌握常用ABB标准I/O板的配置。
掌握Profibus适配器与PLC进行通信的配置方法。
任务描述以ABB标准I/O板DSQC651为模块,模块单元为board10,总线连接DeviceNet1,地址为10,创建数字输入信号DI1、数字输出信号DO1、组输入信号GI1(4位)、组输出信号GO1 (4位)和模拟输出信号A01,并实现I/O信号的监控及操作。
ABB机器人还可以使用DSQC667 除了通过ABB机器人提供的标准I/O板进行与外围设备进行通信以外,模块通过Profibus与PLC进行快捷和大数据量的通信。
如何连接ABB03-5 Profibus适配器?知识储备机器人I/O通信种类机器人提供了丰富的通信接口,可以轻松地实现与周边设备进行通信。
注1 :一种通信协议注2 :不同厂商推出的现场总线协议关于ABB机器人的I/O通信接口的说明:1)ABB的标准I/O板提供的常用信号处理有数字输入di、数字输出do、模拟输入ai、模拟输出ao、以及输送链跟踪,在本章中会对此进行介绍。
2)ABB机器人可以选配标准ABB的PLC省去了原来与外部PLC进行通信设置的麻烦,并且在机器人示教器上就能实现与 PLC 相关的操作。
ABB 标准I/O 板DSQC651和Profibus-DP 为例,进行详细的讲解如何进行相IRC 5控制柜接口说明:附加轴,电源电缆连接器(不能用于此版本)Flex Pendant 连接器 I/O 连接器安全连接器电源电缆连接器 电源输入连接器 电源连接器DeviceNet 连接器信号电缆连接器3)在本章中,以最常用的 关的参数设定。
iirSB 戸 曰曰曰 S 曰曰曰J©口口白吕口口昌口口 §皿冒口 口昌口 S 吕昌口口口口 HQQD 口 DH 口 DerQ 口 HB 口口口口口口 口口 口曰口口口 US 口口口口口口口口 D 口口曰曰口口口口口口口 8曰口 口口口口口口口吕吕口 Ems BBSS 曰口Uss 吕口口口口口ssgg晒闪器偌启口韻盟器mI©©nK说明tllHII I曰a口口口 □口口 □□ 口口口 [3SB 口口口口口口 曰曰S 日悠4◎■T MI EAG标号信号电缆连接器轴选择器连接器附加轴,信号电缆连接器(不能用于此版本)ABB机盟人lOMili接I加例ABB 标准I/O 板(具体规格参数以 ABB 官方最新公布为准)。
Fanuc机器人IO配置和UIUO配置
Fanuc机器人IO配置和UI/UO配置说明:这几天直接跳转发送Fanuc部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc机器人的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
一、Fanuc机器人IO种类1、Fanuc机器人IO分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用 I/O 和专用 I/O 。
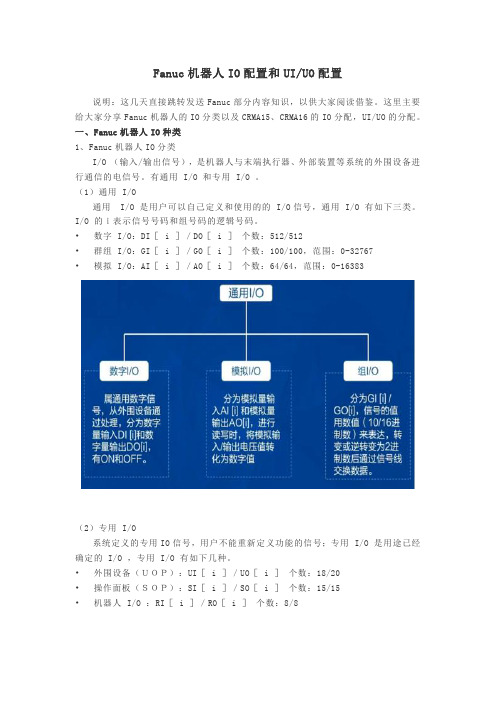
(1)通用 I/O通用I/O 是用户可以自己定义和使用的的 I/O信号,通用 I/O 有如下三类。
I/O 的i表示信号号码和组号码的逻辑号码。
•数字 I/O:DI[ i ]/DO[ i ]个数:512/512•群组 I/O:GI[ i ]/GO[ i ]个数:100/100,范围:0-32767•模拟 I/O:AI[ i ]/AO[ i ]个数:64/64,范围:0-16383(2)专用 I/O系统定义的专用IO信号,用户不能重新定义功能的信号;专用 I/O 是用途已经确定的 I/O ,专用 I/O 有如下几种。
•外围设备(UOP):UI[ i ]/UO[ i ]个数:18/20•操作面板(SOP):SI[ i ]/SO[ i ]个数:15/15•机器人 I/O :RI[ i ]/RO[ i ]个数:8/83、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯IO模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
•0 =处理 I/O 印刷电路板•1~16=I/O 单元 MODELA/B•32 =I/O LINK 从动装置•48 =外围设备控制接口(CRMA15、CRMA16)2、Fanuc机器人CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
•使用处理 I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
•使用 I/O 单元 MODEL A/B的情况下,则为用来识别所连接模块的号码。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A机器人的I O通信集团标准化办公室:[VV986T-J682P28-JP266L8-68PNN]ABB[a]-J-4ABB 机器人的IO 通信任务目标了解ABB 机器人I/O 通信的种类。
掌握常用ABB 标准I/O 板的配置。
掌握Profibus 适配器与PLC 进行通信的配置方法。
任务描述以ABB 标准I/O 板DSQC651 为模块,模块单元为board10,总线连接DeviceNet1,地址为10,创建数字输入信号DI1、数字输出信号DO1、组输入信号GI1(4 位)、组输出信号GO1(4 位)和模拟输出信号 AO1,并实现I/O 信号的监控及操作。
除了通过ABB 机器人提供的标准I/O 板进行与外围设备进行通信以外,ABB 机器人还可以使用DSQC667模块通过Profibus 与PLC 进行快捷和大数据量的通信。
如何连接ABB03-5 Profibus 适配器知识储备机器人I/O 通信种类机器人提供了丰富的I/O 通信接口,可以轻松地实现与周边设备进行通信。
ABB 机器人注1:一种通信协议注2:不同厂商推出的现场总线协议关于ABB 机器人的I/O 通信接口的说明:1)ABB 的标准I/O 板提供的常用信号处理有数字输入di、数字输出do、模拟输入ai、模拟输出ao、以及输送链跟踪,在本章中会对此进行介绍。
2)ABB 机器人可以选配标准ABB 的PLC,省去了原来与外部PLC 进行通信设置的麻烦,并且在机器人示教器上就能实现与PLC 相关的操作。
3)在本章中,以最常用的ABB 标准I/O 板DSQC651 和Profibus-DP 为例,进行详细的讲解如何进行相关的参数设定。
IRC 5 控制柜接口说明:标号说明A 附加轴,电源电缆连接器(不能用于此版本)BFlexPendant 连接器CI/O 连接器D安全连接器E 电源电缆连接器 F电源输入连接器 G电源连接器H DeviceNet 连接器I 信号电缆连接器J 信号电缆连接器K 轴选择器连接器L 附加轴,信号电缆连接器(不能用于此版本)控制柜接口示意图:标准I/O 板本节将介绍常用的ABB 标准I/O 板(具体规格参数以ABB 官方最新公布为准)。
型号说明DSQC 651 分布式 I/O 模块di8\do8 ao2DSQC 652 分布式 I/O 模块di16\do16DSQC 653 分布式 I/O 模块di8\do8 带继电器 DSQC 355A 分布式 I/O 模块ai4\ao4DSQC 377A 输送链跟踪单元标准I/O 板DSQC651DSQC651 板主要提供8 个数字输入信号、8 个数字输出信号和2 个模拟输出信号的处理。
(1)模块接口说明标号说明A 数字输出信号指示灯B X1 数字输出接口C X6 模拟输出接口D X5 是DeviceNet 接口E 模块状态指示灯F X3 数字输入接口G 数字输入信号指示灯(2)模块接口连接说明X1 端子:X3 端子:X1 端子编号使用定义地址分配1 OUTPUT CH1 322 OUTPUT CH2 333 OUTPUT CH3 344 OUTPUT CH4 355 OUTPUT CH5 36X3 端子编号使用定义地址分配1 INPUT CH1 02 INPUT CH2 13 INPUT CH3 24 INPUT CH4 35 INPUT CH5 4X6 端子编号使用定义地址分配1未使用2未使用3未使用40V5模拟输出ao10~156OUTPUT CH6376INPUT CH65 7OUTPUT CH7387INPUT CH76 8OUTPUT CH8398INPUT CH87 90V90V1024V10未使用X5 端子:X5 端子编号使用定义1 0V BLACK2 CAN 信号线low BLUE3 屏蔽线4 CAN 信号线high WHILE5 24V RED6 GND 地址选择公共端7 模块ID bit 0(LSB)8 模块ID bit 1(LSB)9 模块ID bit 2(LSB)10 模块ID bit 3(LSB)11 模块ID bit 4(LSB)12 模块ID bit 5(LSB)注:BLACK 黑色,BLUE 蓝色,WHILE 白色,RED 红色*ABB 标准I/O 板是挂在DeviceNet 网络上的,所以要设定模块在网络中的地址。
端子X5的6~12 的跳线用来决定模块的地址,地址可用范围在10~63。
如上图,将第8 脚和第10 脚的跳线剪去,2+8=10就可以获得10 的地址。
X6 端子:*模拟输出的范围:0~+10V6 模拟输出ao2 16~31标准I/O 板DSQC652DSQC652 板主要提供16 个数字输入信号和16 个数字输出信号的处理。
(1)模块接口说明标号说明A 数字输出信号指示灯 BX1、X2 数字输出接口C X5 是DeviceNet 接口 D模块状态指示灯E X3、X4 数字输入接口F 数字输入信号指示灯(2)模块接口连接说明X1 端子:X2 端子:X1 端子编号使用定义地址分配X2 端子编号使用定义地址分配1OUTPUT CH101OUTPUT CH98 2OUTPUT CH212OUTPUT CH109 3OUTPUT CH323OUTPUT CH1110 4OUTPUT CH434OUTPUT CH1211 5OUTPUT CH545OUTPUT CH1312 6OUTPUT CH656OUTPUT CH1413 7OUTPUT CH767OUTPUT CH1514 8OUTPUT CH878OUTPUT CH161590V90V 1024V1024VX4 端子编号使用定义 地址分配1INPUT CH98 2 INPUT CH10 9 3 INPUT CH11 10 4 INPUT CH12 11 5 INPUT CH13 12 6 INPUT CH14 13 7 INPUT CH15 14 8 INPUT CH16159 0V 1024VX4 端子:X5、X3 端子同 DSQC651 板标准 I/O 板 DSQC653DSQC653 板主要提供 8 个数字输入信号和 8 个数字继电器输出信号的处理。
(1)模块接口说明标号说明A数字继电器输出信号指示灯 B X1 数字继电器输出信号接口 C X5 是 DeviceNet 接口D 模板状态指示灯E X3数字输入信号接口F 数字输入信号指示灯(2)模块接口连接说明X1 端子:X3 端子:1OUTPUT CH1A01INPUTCH102OUTPUT CH1B2INPUTCH213OUTPUT CH2A13INPUTCH324OUTPUT CH2B4INPUTCH435OUTPUT CH3A25INPUTCH546OUTPUT CH3B6INPUTCH657OUTPUT CH4A37INPUTCH768OUTPUT CH4B8INPUTCH879OUTPUT CH5A490V10OUTPUT CH5B10~16未使用11OUTPUT CH6A512 OUTPUT CH6B13 OUTPUT CH7A 614 OUTPUT CH7B15 OUTPUT CH8A 716 OUTPUT CH8BX5 端子同DQSC651 板标准I/O 板DSQC355ADSQC355A 板主要提供4 个模拟输入信号和4 个模拟输出信号的处理。
(1)模块接口说明标号说明A X8 模拟输入端口B X7 模拟输出端口C X5 是DeviceNet 接口D X3 是供电电源(2)模块接口连接说明X3 端子:X3 端子编号使用定义1 0V2 未使用3 接地4 未使用5 +24VX5 端子同DSQC651X7 端子:X7 端子编号使用定义地址分配1 模拟输出_1,-10V/+10V 0~152 模拟输出_2,-10V/+10V 16~313 模拟输出_3,-10V/+10V 32~474 模拟输出_4,4~20mA 48~635~18 未使用19 模拟输出_1,0V20 模拟输出_2,0V21 模拟输出_3,0V22 模拟输出_4,0V23~24 未使用X8 端子:X8 端子编号使用定义地址分配1 模拟输入_1,-10V/+10V 0~152 模拟输入_2,-10V/+10V 16~313 模拟输入_3,-10V/+10V 32~474 模拟输入_4,-10V/+10V 48~635~16 未使用17~24 +24V25 模拟输入_1,0V26 模拟输入_2,0V27 模拟输入_3,0V28 模拟输入_4,0V29~32 0V标准I/O 板DSQC377ADSQC377A 板主要提供机器人输送链跟踪功能所需的编码器与同步开关信号的处理。
(1)模块接口说明(2)模块接口连接说明X3 同DSQC355A X5同DSQC651标号说明A X20 是编码器与同步开关的端子B X5 是DeviceNet 接口C X3 是供电电源X20 端子:X20 端子编号使用定义1 24V2 0V3 编码器1,24V4 编码器1,0V5 编码器1,A 相6 编码器1,B 相7 数字输入信号1,24V8 数字输入信号1,0V9 数字输入信号1,信号10~16 未使用任务实施配置DSQC651 板ABB 标准I/O 板DSQC651 是最为常用的模块,下面以创建数字输入信号di、数字输出信号do、组输入信号gi、组输出信号go 和模拟输出信号ao 为例做一个详细的讲解。
1.定义DSQC651 板的总线连接ABB 标准I/O 板都是下挂在DeviceNet 现场总线下的设备,通过X5 端口与DeviceNet 现场总线进行通信。
定义DSQC651 板的总线连接的相关参数说明见表:2.定义数字输入/输出信号定义信号的操作步骤:数字输入信号di1 的相关参数见表:参数名称设定值说明数字输出信号d01 的相关参数见表:3.定义组输入/输出信号组输入信号gi1 的相关参数及状态将下表:组输出信号go1 的相关参数及状态见表:*组输入/输出信号就是将几个数字输入信号组合起来使用,用于接受外围设备输入的BCD 编码的十进制数。
此例中,组信号占用地址1~4 共4 位,可以代表十进制数0~15。
如此类推,如果占用地址5 位的话,可以代表十进制数0~31。
4.定义模拟输出信号模拟输出信号ao1 的相关参数见表:O 信号监控和操作(1)“输入输出”界面打开输出输出界面的操作步骤:*可在“控制面板”—“配置”—“I/O”中将常用的I/O 信号添加到输入输出界面的常用视图。
(2)对I/O 信号进行仿真和强制操作对I/O 信号的状态或数值进行仿真和强制的操作,以便在机器人调试和检修时使用。