二阶系统的传递函数
二阶系统的性能指标
一、二阶系统传递函数的标准形式二阶系统的闭环传递函数写成标准形式为:2222)()(nn n s s s R s C ωξωω++=式中,ξ为阻尼比;n ω为无阻尼自振频率。
所以,二阶系统的特征方程为:022=++n n s s ωξω由上式解得二阶系统的二个特征根(即闭环极点)为:22.11ξωξω-±-=n n j s随着阻尼比ξ取值的不同,二阶系统的特征根(即闭环极点)也不相同。
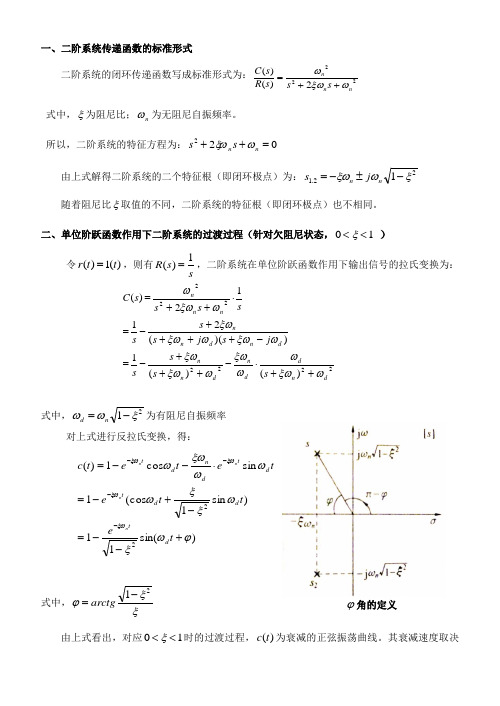
二、单位阶跃函数作用下二阶系统的过渡过程(针对欠阻尼状态,10<<ξ )令)(1)(t t r =,则有ss R 1)(=,二阶系统在单位阶跃函数作用下输出信号的拉氏变换为:2222222)()(1))((2112)(d n d d n d n n d n d n n n n n s s s s j s j s s s ss s s C ωξωωωξωωξωξωωξωωξωξωωξωω++⋅-+++-=-++++-=⋅++=式中,21ξωω-=n d 为有阻尼自振频率对上式进行反拉氏变换,得:)sin(11)sin 1(cos 1sin cos 1)(22ϕωξωξξωωωξωωξωξωξωξω+--=-+-=⋅--=----t e t t e t e t e t c d t d d t d td n d t n nnn式中,ξξϕ21-=arctg由上式看出,对应10<<ξ时的过渡过程,)(t c 为衰减的正弦振荡曲线。
其衰减速度取决ϕ角的定义于n ξω值的大小,其衰减振荡的频率便是有阻尼自振频率d ω,即衰减振荡的周期为:2122ξωπωπ-==n dd T三、二阶系统的性能指标1.上升时间tr :上升时间是响应曲线由零上升到稳态值所需要的时间。
根据定义,当r t t =时,1)(=r t c 。
即 0sin 1cos 2=-+r d r d t t ωξξω或 nn r d t tg ξωξωω21-=,)(ϕπω-=tg t tg r d所以,上升时间为:21ξωϕπ--=n r t2.峰值时间tp :过渡过程曲线达到第一个峰值所需的时间。
自动控制单选题参考答案

D.任意 T1 和 2
相位超前校正装置的奈氏曲线为( )
B
A.圆
B.上半圆
C.下半圆
D.45°弧线
在系统中串联 PD 调节器,以下那一种说法是错误的( )
D
A.是一种相位超前校正装置
B.能影响系统开环幅频特性的高频段
C.使系统的稳定性能得到改善 D.使系统的稳态精度得到改善
根轨迹渐近线与实轴的交点公式为( )
B
s2
A.7
B.2
C. 7
D. 1
2
2
若系统的传递函数在右半 S 平面上没有零点和极点,则该系统称作( )
B
A.非最小相位系统 B.最小相位系统 C.不稳定系统 D.振荡系统
一般为使系统有较好的稳定性,希望相位裕量 为( )
C
A.0~15
B.15~30
C.30~60
D.60~90
某系统的闭环传递函数为: GB s
B.(1,j0)
C.(1,j1)
D.(10,j0)
直接对控制对象进行操作的元件称为( )
D
A.给定元件
B.放大元件 C.比较元件
D.执行元件
某典型环节的传递函数是 Gs 1 ,则该环节是( )
C
Ts
A.比例环节
B.惯性环节 C.积分环节
D.微分环节
已知系统的单位脉冲响应函数是 yt 0.1t 2 ,则系统的传递函数是( )
A
A. 0.2 s3
B. 0.1 s
C. 0.1 s2
D. 0.2 s2
与开环控制系统相比较,闭环控制系统通常对( )进行直接或间接地测量,通过反馈环节去影响控 B
制信号。
A.输出量
二阶振荡环节传递函数
二阶振荡环节传递函数引言二阶振荡环节传递函数是控制系统中的一种常见传递函数,用于描述振荡系统的动态特性和频率响应。
它可以被广泛应用于电子、机械和航空等领域中的控制系统设计和分析。
二阶振荡系统简介二阶振荡系统是指系统的传递函数具有二阶多项式形式的振荡系统。
它由两个一阶环节级联或串联而成,常用的结构有二阶低通滤波器、二阶带通滤波器、机械振动系统等。
在控制系统中,二阶振荡系统的传递函数通常表示为:G(s)=K(s2+2ξωn s+ωn2)其中,$ K $ 表示系统的增益,$ ξ $ 表示系统的阻尼比,$ ω_n $ 表示系统的自然频率。
二阶振荡系统的特点是具有明显的振荡行为,其频率响应曲线在某个频率处达到峰值,且在峰值附近有相位差发生。
因此,二阶振荡系统在控制系统设计中占据重要地位。
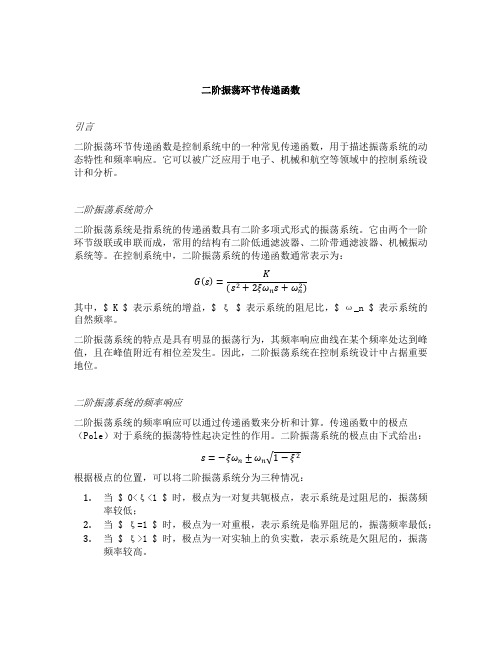
二阶振荡系统的频率响应二阶振荡系统的频率响应可以通过传递函数来分析和计算。
传递函数中的极点(Pole)对于系统的振荡特性起决定性的作用。
二阶振荡系统的极点由下式给出:s=−ξωn±ωn√1−ξ2根据极点的位置,可以将二阶振荡系统分为三种情况:1.当$ 0<ξ<1 $ 时,极点为一对复共轭极点,表示系统是过阻尼的,振荡频率较低;2.当$ ξ=1 $ 时,极点为一对重根,表示系统是临界阻尼的,振荡频率最低;3.当$ ξ>1 $ 时,极点为一对实轴上的负实数,表示系统是欠阻尼的,振荡频率较高。
根据传递函数的形式,二阶振荡系统的频率响应曲线可以分为低通、高通和带通三种类型,具体如下:1. 二阶低通滤波器当二阶振荡系统中的传递函数为低通滤波器时,频率响应曲线在截止频率附近具有较高的增益,截止频率以下的信号通过增益较大,截止频率以上的信号被抑制。
这种滤波器常用于信号处理和电子电路中。
2. 二阶高通滤波器当二阶振荡系统中的传递函数为高通滤波器时,频率响应曲线在截止频率附近具有较低的增益,截止频率以下的信号被抑制,截止频率以上的信号通过增益较大。
二阶系统的单位斜坡响应曲线

二阶系统的单位斜坡响应曲线1. 引言在控制系统中,二阶系统是一种常见的模型,用于描述许多实际系统的动态行为。
二阶系统的单位斜坡响应曲线是评估系统性能和稳定性的重要工具之一。
本文将介绍二阶系统的基本概念、特性以及如何绘制单位斜坡响应曲线。
2. 二阶系统概述二阶系统是指具有两个自由度(或两个能量存储元件)的动态系统。
它可以用传递函数表示,传递函数通常为以下形式:G(s)=K(s2+2ζωn s+ωn2)其中,K是增益,ζ是阻尼比,ωn是自然频率。
3. 单位斜坡输入信号单位斜坡输入信号是指输入信号随时间线性增加或减小。
在控制系统中,单位斜坡输入信号常用于测试系统对于线性变化的响应能力。
单位斜坡输入信号可以表示为:R(s)=1 s其中R(s)表示拉氏变换后的单位斜坡输入信号。
4. 单位斜坡响应曲线的绘制方法单位斜坡响应曲线可以通过拉氏变换和逆拉氏变换的计算来得到。
具体步骤如下:1.将传递函数G(s)和单位斜坡输入信号R(s)进行相乘,得到输出信号Y(s):Y(s)=G(s)⋅R(s)2.对Y(s)进行部分分式展开,得到形如As +Bs+a的表达式。
3.对每一项进行拉氏逆变换,得到时间域的表达式。
4.将各项叠加得到总的单位斜坡响应曲线。
5. 单位斜坡响应曲线的特性分析单位斜坡响应曲线可以通过观察其特性来评估系统的性能和稳定性。
以下是常见的特性分析方法:5.1 响应时间响应时间指系统从初始状态到达稳定状态所需的时间。
在单位斜坡响应曲线中,可以通过观察曲线上升或下降至某一特定值所需的时间来估计系统的响应时间。
5.2 超调量超调量是指单位斜坡响应曲线中最高点与稳态值之间的差值,表示系统对于单位斜坡输入的过冲程度。
超调量越小,系统的稳定性越好。
5.3 响应速度响应速度指系统从初始状态到达稳定状态的快慢程度。
在单位斜坡响应曲线中,可以通过观察曲线上升或下降至某一百分比值所需的时间来估计系统的响应速度。
5.4 阻尼比阻尼比ζ是描述二阶系统阻尼特性的参数。
二阶系统分析
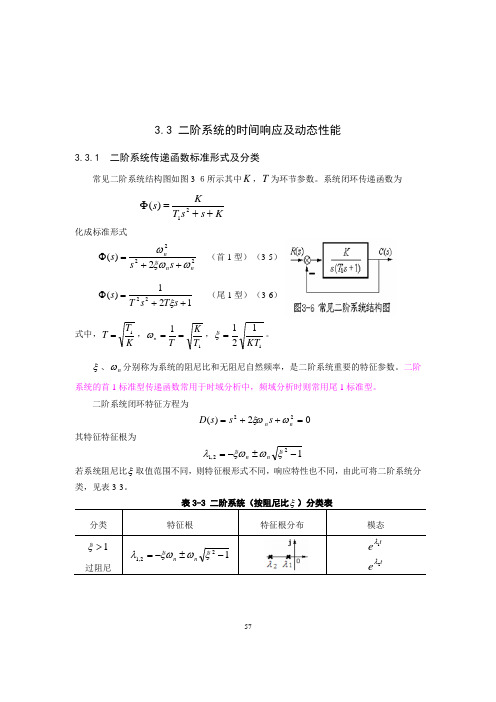
573.3 二阶系统的时间响应及动态性能3.3.1 二阶系统传递函数标准形式及分类常见二阶系统结构图如图3-6所示其中K ,T 为环节参数。
系统闭环传递函数为Ks s T Ks ++=Φ21)(化成标准形式2222)(nn ns s s ωξωω++=Φ (首1型) (3-5) 121)(22++=Φs T s T s ξ (尾1型) (3-6)式中,KT T 1=,11T K T n ==ω,1121KT =ξ。
ξ、n ω分别称为系统的阻尼比和无阻尼自然频率,是二阶系统重要的特征参数。
二阶系统的首1标准型传递函数常用于时域分析中,频域分析时则常用尾1标准型。
二阶系统闭环特征方程为02)(22=++=n n s s s D ωξω其特征特征根为122,1-±-=ξωξωλn n若系统阻尼比ξ取值范围不同,则特征根形式不同,响应特性也不同,由此可将二阶系统分类,见表3-3。
58数学上,线性微分方程的解由特解和齐次微分方程的通解组成。
通解由微分方程的特征根决定,代表自由响应运动。
如果微分方程的特征根是1λ,2λ,, n λ且无重根,则把函数te1λ,te 2λ,, tn eλ称为该微分方程所描述运动的模态,也叫振型。
如果特征根中有多重根λ,则模态是具有tte λ, ,2t e t λ形式的函数。
如果特征根中有共轭复根ωσλj ±=,则其共轭复模态t e )j (ωσ+与te )j (ωσ-可写成实函数模态t etωσsin 与t e t ωσcos 。
每一种模态可以看成是线性系统自由响应最基本的运动形态,线性系统自由响应则是其相应模态的线性组合。
3.3.2 过阻尼二阶系统动态性能指标计算设过阻尼二阶系统的极点为()n T ωξξλ11211---=-= ()n T ωξξλ11222-+-=-= )(21T T > 系统单位阶跃响应的拉氏变换sT s T s s R s s C n1)1)(1()()()(212++==ωΦ进行拉氏反变换,得出系统单位阶跃响应 111)(211221-+-+=--T T eT T e t h T t T t0≥t (3-7)59过阻尼二阶系统单位阶跃响应是无振荡的单调上升曲线。
二阶系统的时域响应与极点的关系-概述说明以及解释
二阶系统的时域响应与极点的关系-概述说明以及解释1.引言1.1 概述二阶系统是一类常见的控制系统,其具有两个自由度。
在控制理论中,了解二阶系统的时域响应与极点的关系对于系统分析和设计非常重要。
本文旨在通过探讨二阶系统的时域响应与极点的关系,揭示出其内在的数学规律和工程应用。
在本文中,我们会对二阶系统进行定义和特点的介绍,然后重点关注时域响应与极点之间的联系。
二阶系统的时域响应是指系统在时域上对输入信号的响应情况,它包括了系统的过渡过程、稳定过程和超调量等重要指标。
而系统的极点则是描述系统动态特性的重要参数,它们决定了系统的稳定性、阻尼性和振荡频率等方面。
在本文的后续内容中,我们将通过实例和数学分析,详细探讨二阶系统的时域响应与极点之间的关系。
我们将会介绍不同类型的二阶系统以及它们的特点,在此基础上,深入研究时域响应与极点之间的对应关系。
通过了解二阶系统的时域响应与极点的关系,我们可以更好地理解和分析控制系统的动态特性,为系统设计和性能调整提供理论依据和指导。
对于工程实践中的控制系统设计和优化,这一关系的理解具有重要的实际应用意义。
接下来的内容将重点聚焦于系统的定义和特点,以及时域响应与极点之间的关系,希望读者能够通过本文对二阶系统有更全面、深入的了解。
1.2文章结构1.2 文章结构本文将围绕二阶系统的时域响应与极点的关系展开讨论。
文章分为引言、正文和结论三个部分。
引言部分首先对二阶系统进行概述,介绍了其定义和特点。
随后,本节将阐述文章的结构安排,为读者提供对接下来内容的整体了解。
最后,明确本文的目的,即通过分析二阶系统时域响应与极点之间的关系,探索出对二阶系统的应用和意义。
正文部分将详细探讨二阶系统的时域响应与极点之间的关系。
首先,将对二阶系统的定义和特点进行阐述,以便读者对系统本身有清晰的认识。
然后,我们将深入研究时域响应和极点之间的关系,并通过理论分析和实例说明,阐释二阶系统响应特性与极点位置之间的关联。
二阶传递函数的调节时间
二阶传递函数的调节时间
二阶传递函数是控制工程中常见的数学模型,通常用于描述惯性系统或者振荡系统的动态特性。
调节时间是指系统从初始状态到稳定状态所需的时间,对于二阶传递函数来说,调节时间可以从不同角度进行解释和计算。
首先,我们可以从阶跃响应的角度来计算二阶传递函数的调节时间。
对于一个二阶系统,其阶跃响应可以用一些特定的公式来表示,从阶跃响应曲线中可以得到系统的调节时间。
调节时间可以通过观察阶跃响应曲线上的时间点,比如上升时间(rise time)、上升时间的百分比(如5%上升时间、10%上升时间)来计算。
其次,我们还可以从频域响应的角度来计算二阶传递函数的调节时间。
通过对传递函数进行频域分析,可以得到系统的频率响应曲线,从中可以得到系统的调节时间。
例如,可以通过计算系统的带宽(bandwidth)来估计系统的调节时间。
另外,从控制理论的角度来看,我们可以利用二阶传递函数的参数来计算调节时间。
对于一个标准的二阶传递函数,其参数包括阻尼比(damping ratio)和自然频率(natural frequency),这
些参数可以用来计算系统的调节时间。
总之,二阶传递函数的调节时间可以从不同的角度进行计算和
解释,包括阶跃响应、频域响应和控制理论等方面。
在实际工程中,根据具体的系统特性和需求,可以选择合适的方法来计算和评估系
统的调节时间。
二阶传递函数
二阶传递函数
二阶传递函数是一种很常见的函数,它是一种有限输入和有限输出的函数,其定义域是实数集,值域也是实数集。
二阶传递函数通常用于研究系统的输入和输出之间的关系。
它是一种重要的系统控制理论,它可以用来模拟由多个阶的传递组件构成的系统。
例如,电动机控制系统就是一个典型的二阶传递函数系统,它可以利用二阶传递函数来模拟系统的输入和输出之间的关系,从而实现电动机的控制。
二阶传递函数还可以用来模拟计算机系统中的内存控制器和存储系统。
它可以描述计算机系统中的存储器控制器和存储器之间的关系,从而实现对计算机系统中的内存控制和存储的控制。
二阶传递函数还可以用来模拟控制电路中的高速数字计算器。
它可以用来描述高速数字计算器中的输入和输出之间的关系,从而实现对控制电路中的高速数字计算的控制。
二阶传递函数还可以用来模拟经济系统中的供求关系。
可以利用二阶传递函数来描述经济系统中的供求关系,从而更好地控制经济系统。
二阶传递函数是一种重要的函数,它被广泛应用于控制系统、计算机系统、控制电路和经济系统中,用来描述各种输入和输出之间的
关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t 1 , w(t) 1 0.37
n n e
ζ》1时,式右边最后一项可以忽略,二阶系统可以用靠近 原点的那个极点所表示的一阶系统来近似分析。
4. 系统阶跃响应的特点分析
①①响响应应特特性性 与与闭闭环环极极点点 位位置置有有关关
闭闭环环极极点点具具有有负负实实部部,,时时间间趋趋向向无无穷穷大大时时,, 瞬瞬态态响响应应趋趋于于零零,,系系统统稳稳定定。。
2 1 e s1
2 1 e s2
2 2 1
2 2 1
单调上升但不会超过稳态值,响应是非振荡的。两个极
点中离s平面原点较远的极点对应的瞬态分量幅值较小,衰 减较快。
随着阻尼比的增大,其中一个极点将越来越远离s平面
原点,其幅值越来越小,衰减越来越快;而另一个极点越来
越靠近原点,其幅值越来越大,衰减越来越慢。当阻尼比
②②无无阻阻尼尼系系统统
y(t) 1 cosnt
有一对共轭虚极点, 响应是等幅振荡曲线
③③临临界界阻阻尼尼系系统统 y(t) 1 ent (1 nt) 单调上升曲线
两个相同的负实数极点,两个相同的惯性环节的串联
④④过过阻阻尼尼系系统统
有两个负实数极点
y(t) 1
注注意意
y(t) 1 e nt sin( d t arccos ) 1 2
极点的负实部在指数上,虚部是振荡频率。
欠阻尼系统的瞬态响
应是正弦衰减振荡,衰减 的快慢与系统极点的负实 部有关,距虚轴越远,衰 减越快;振荡频率取决于 极点的虚部。阻尼比影响 振荡的程度。
3. 二阶系统的响应曲线⑵ห้องสมุดไป่ตู้
根据系统阻尼比ζ的值,二阶系统有:
j n
s1,2
n
j n n
1 2
n ( 2 1)
0 0 1
1 1
由图可知
cos 1
3. 二阶系统的响应曲线⑴
①①欠欠阻阻尼尼系系统统 系统在s左半平面上有一对共轭复数极点
③③阻阻尼尼比比ζζ 和和无无阻阻尼尼自自 然确然确频定频定率了率了ω系ω系统n统n 动动态态特特性性
阻阻尼尼比比ζζ确确定定了了系系统统响响应应振振荡荡特特性性——响响应应平平稳稳性性。。 ζζ越越小小,,响响应应振振荡荡越越剧剧烈烈;;ζζ越越大大,,响响应应越越缓缓慢慢呆呆滞滞。。 无长越应无长越应短阻就快短阻就快—尼慢。—尼慢。自,响响自,响响反然应应反然应应之频快快之频快快,率速速,率速速ω性性ω性性ωωn与。n与。越n越n响ω确响ω确大大n应定n应定,越,越平了平了即小即小稳系稳系时,时,性统性统间即间即是瞬是瞬常时常时相态相态数间数间互响互响常T常T越矛应越矛应数数小盾过小盾过TT越,的程越,的程大响。时大响。时,应间,应间响就的响就的
共共轭轭复复数数极极点点::衰衰减减正正弦弦振振荡荡曲曲线线,,系系统统稳稳定定。。 负负实实数数极极点点::响响应应是是单单调调上上升升曲曲线线,,系系统统稳稳定定。。 共共轭轭虚虚极极点点::等等幅幅振振荡荡曲曲线线,,系系统统临临界界稳稳定定。。
②②响响应应的的快快慢慢与与极极点点 极极点点距距离离虚虚轴轴近近,,对对应应的的响响应应模模 距距离离虚虚轴轴的的远远近近有有关关 式式衰衰减减慢慢;;距距离离越越远远衰衰减减越越快快。。
(二) 二阶系统的阶跃响应
1. 二阶系统的传递函数
二阶系统结构如图
二阶系统闭环传递函数为
W (s) Y(s)
2 n
R(s) s 2 2 n s 2
二阶系统开环传递函数为
G(s)H (s)
2 n
s(s 2 n )
注注意意
典型环节与系统 的联系与区别
2. 二阶系统闭环极点的分布