缓和曲线平行线的通用参数方程及应用(论文)
参数方程及其应用
参数方程及其应用参数方程是数学中一种常用的描述曲线的方法,通过引入参数来表示曲线上的点的坐标。
参数方程的优势在于它可以描述一些复杂的曲线,例如椭圆、双曲线和螺旋线等。
本文将介绍参数方程的基本概念以及其在不同领域中的应用。
一、参数方程的基本概念参数方程由一组函数构成,这些函数分别表示曲线上的点的x坐标和y坐标。
通常用t作为参数,通过给定t的取值范围,我们可以确定曲线上的点。
例如,对于平面上的一条曲线,它的参数方程可以表示为:x = f(t)y = g(t)其中f(t)和g(t)是关于t的函数。
通过选择不同的函数形式,我们可以得到各种不同的曲线。
二、参数方程的应用1. 几何学中的参数方程参数方程在几何学中有广泛的应用。
例如,椭圆可以用参数方程表示为:x = a*cos(t)y = b*sin(t)其中a和b分别表示椭圆的长半轴和短半轴。
通过改变参数t的取值范围,我们可以获得椭圆上的所有点。
另一个例子是螺旋线,它可以通过以下参数方程描述:x = a*cos(t)y = a*sin(t)z = b*t通过改变参数t的取值范围,我们可以得到一条在三维空间中逐渐升高的螺旋线。
2. 物理学中的参数方程参数方程在物理学中也有广泛的应用。
例如,质点在自由落体过程中的运动可以用参数方程描述:x = v0*cos(θ)*ty = v0*sin(θ)*t - (1/2)*g*t^2其中v0表示起始速度,θ表示抛射角度,g表示重力加速度。
通过给定不同的初始条件,我们可以得到不同情况下的自由落体轨迹。
3. 工程学中的参数方程参数方程在工程学中也有一些应用。
例如,在航空领域中,飞机的航迹可以用参数方程表示:x = v*cos(α)*ty = v*s in(α)*tz = h其中v表示飞机的速度,α表示飞机的航向角,t表示时间,h表示飞机的高度。
通过改变参数的取值,我们可以获得飞机在空中飞行的轨迹。
4. 计算机图形学中的参数方程参数方程在计算机图形学中也有广泛的应用。
缓和曲线测设

8 16
348.71 349.44 350.16 350.89 351.62 352.35
15 29
5.65 5.70 5.74 5.79 5.84 5.89
16.73 16.83 16.92 17.02 17.12 17.21
四、圆曲线加缓和曲线的综合要素及主点测设
1、圆曲线加缓和曲线的综合要素 T=(R+p)tgα/2 +m L=L0+2l0=R(α-2β0) π/180° +2l0 (L0:圆曲线长) E0=(R+P)secα/2 – R q=2T-L
综合要素表(R=500m)
3、主点的测设 1.经纬仪置于JD,后视ZH,量取T,得ZH点;后视HZ,量取T,得HZ点;在分角线上量取E0,得QZ点。 2.分别在ZH、HZ点架仪,后视JD方向,量取x0,再在此方向垂直方向上量取y0,得HY和YH点。
11.5 圆曲线加缓和曲线的详细测设
偏角法 要注意:点是位于缓和曲线,还是位于圆曲线。
切线支距法 要注意:点是位于缓和曲线上,还是位于圆曲线上。
位于缓和曲线
位于圆曲线
当点位于缓和曲线上,有: x = l – l5/40R2l02 y = l3/ 6Rl0
01
02
L
L-x
y
10 20 30 40 50 60 70 80 90
0.00 0.00 0.00 0.00 0.01 0.02 0.03 0.06 0.09
2 4
线路等级
l0
ΔT
ΔL
Δq
ΔE0
ⅠⅡ Ⅰ Ⅱ ⅢΒιβλιοθήκη Ⅲ 专 专 专130 90 80 70 60 40 30 20
最大缓和曲线参数最大缓和曲线长度
最大缓和曲线参数最大缓和曲线长度【标题】最大缓和曲线参数与最大缓和曲线长度:探索道路设计的重要关键【导言】在道路设计领域中,最大缓和曲线参数和最大缓和曲线长度是两个关键概念。
它们对于确保道路安全、提高车辆行驶效率具有重要意义。
本文将深入探讨最大缓和曲线参数和最大缓和曲线长度的定义、计算方法以及其在道路设计中的作用。
通过对这两个概念的深度剖析,我们可以更好地理解道路设计的原理和要点。
【正文】一、最大缓和曲线参数的定义与计算1.1 什么是最大缓和曲线参数?在道路设计中,最大缓和曲线参数是指曲线半径与道路设计速度之间的比值。
它用来衡量道路曲线的陡峭程度和车辆行驶的平稳度。
1.2 如何计算最大缓和曲线参数?最大缓和曲线参数的计算可以通过下述公式求得:最大缓和曲线参数 = 曲线半径 / 设计速度1.3 最大缓和曲线参数尺度的意义最大缓和曲线参数的数值越大,说明道路曲线越平缓,车辆行驶速度越高。
而当最大缓和曲线参数较小时,道路曲线将更加陡峭,车辆行驶速度则需要有所限制。
二、最大缓和曲线长度的定义与计算2.1 什么是最大缓和曲线长度?最大缓和曲线长度是指在曲线行驶过程中,车辆需要从初始速度逐渐减速到合适的转弯速度,然后再逐渐加速回到正常行驶速度所需的水平距离。
2.2 如何计算最大缓和曲线长度?最大缓和曲线长度的计算涉及曲线的半径、车辆速度和加减速度等参数。
其计算公式如下:最大缓和曲线长度 = (车辆速度^2) / (加减速度 * 曲线半径)2.3 最大缓和曲线长度的意义最大缓和曲线长度的数值越大,说明曲线的路径越缓和,车辆行驶过程中的速度变化越平稳。
而当最大缓和曲线长度较小时,车辆行驶过程将会出现剧烈的速度变化,不利于行车的平稳性和安全性。
三、最大缓和曲线参数和最大缓和曲线长度的综合作用最大缓和曲线参数和最大缓和曲线长度是道路设计中两个密切相关的概念。
它们在实际设计中的配合使用可以实现平稳、高效的车辆行驶。
对于同一曲线半径和车辆速度,较大的最大缓和曲线参数意味着较长的最大缓和曲线长度,推动车辆更平稳地行驶。
第 一 缓 和 曲 线 参 数 a1

第一缓和曲线参数 a1(最新版)目录1.引言2.曲线参数 a1 的定义和作用3.曲线参数 a1 对曲线的影响4.如何选择合适的曲线参数 a15.结论正文1.引言在数学和物理学中,曲线是一种常见的数学对象。
曲线的形状和特性可以通过许多参数来描述和控制。
其中,缓和曲线参数 a1 是一个重要的参数,它能够影响曲线的形状和变化。
在本文中,我们将探讨缓和曲线参数 a1 的定义、作用以及如何选择合适的参数。
2.曲线参数 a1 的定义和作用缓和曲线参数 a1,通常用来描述平滑过渡的曲线,例如在数学函数或者物理学中的运动轨迹。
参数 a1 的取值范围通常在 0 到 1 之间,当 a1 取 0 时,曲线呈现出线性增长的趋势;当 a1 取 1 时,曲线呈现出指数增长的趋势。
通过改变参数 a1 的值,可以在线性增长和指数增长之间实现平滑过渡。
3.曲线参数 a1 对曲线的影响缓和曲线参数 a1 对曲线的形状和变化具有重要影响。
当 a1 取较小的值时,曲线的斜率会变得较小,曲线会变得更加平缓;当 a1 取较大的值时,曲线的斜率会变得较大,曲线会变得更加陡峭。
因此,通过改变参数 a1 的值,可以实现对曲线形状的精确控制。
4.如何选择合适的曲线参数 a1在选择缓和曲线参数 a1 时,需要考虑曲线的实际应用场景。
例如,在物理学中描述物体的运动轨迹时,需要选择合适的参数 a1 使得物体的运动更加符合实际情况。
同时,也可以根据实际需求和经验,选择合适的参数 a1 来实现特定的曲线形状。
5.结论缓和曲线参数 a1 是描述和控制曲线形状和变化的重要参数。
通过改变参数 a1 的值,可以在线性增长和指数增长之间实现平滑过渡,从而满足不同的实际应用需求。
缓和曲线
缓和曲线缓和曲线【transition curve】指的是平面线形中,在直线与圆曲线,圆曲线与圆曲线之间设置的曲率连续变化的曲线。
缓和曲线是道路平面线形要素之一,它是设置在直线与圆曲线之间或半径相差较大的两个转向相同的圆曲线之间的一种曲率连续变化的曲线。
《公路工程技术标准》(JTG B01-2003)规定,除四级路可不设缓和曲线外,其余各级公路都应设置缓和曲线。
在现代高速公路上,有时缓和曲线所占的比例超过了直线和圆曲线,成为平面线形的主要组成部分。
在城市道路上,缓和曲线也被广泛地使用。
缓和曲线设置的目的:通过曲率的逐渐变化,适应汽车转向操作的行驶轨迹及路线的顺畅,缓和行车方向的突变和离心力的突然产生;使离心加速度逐渐变化,不致产生侧向冲击;并缓和超高,作为超高变化的过渡段,来减少行车震荡。
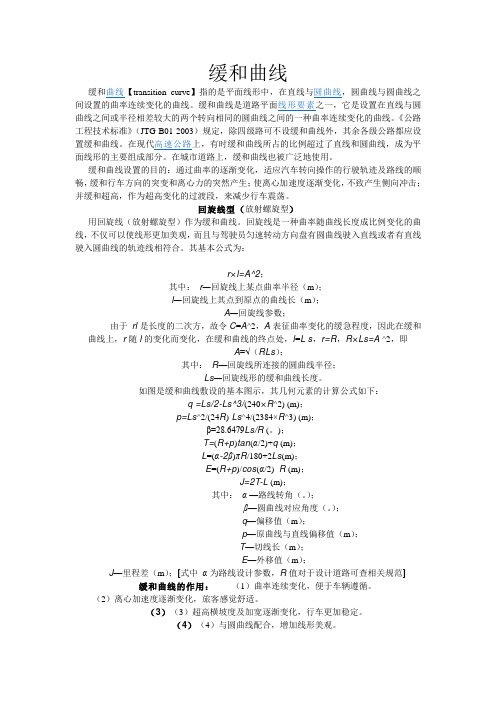
回旋线型(放射螺旋型)用回旋线(放射螺旋型)作为缓和曲线。
回旋线是一种曲率随曲线长度成比例变化的曲线,不仅可以使线形更加美观,而且与驾驶员匀速转动方向盘有圆曲线驶入直线或者有直线驶入圆曲线的轨迹线相符合。
其基本公式为:r×l=A^2;其中:r—回旋线上某点曲率半径(m);l—回旋线上其点到原点的曲线长(m);A—回旋线参数;由于rl是长度的二次方,故令C=A^2,A表征曲率变化的缓急程度,因此在缓和曲线上,r随l的变化而变化,在缓和曲线的终点处,l=L s,r=R,R×Ls=A ^2,即A=√(RLs);其中:R—回旋线所连接的圆曲线半径;Ls—回旋线形的缓和曲线长度。
如图是缓和曲线敷设的基本图示,其几何元素的计算公式如下:q =Ls/2-Ls^3/(240×R^2) (m);p=Ls^2/(24R)-Ls^4/(2384×R^3) (m);β=28.6479Ls/R (。
);T=(R+p)tan(α/2)+q (m);L=(α-2β)πR/180+2Ls(m);E=(R+p)/cos(α/2) -R (m);J=2T-L (m);其中:α—路线转角(。
缓和曲线设置
一、缓和曲线缓和曲线是设置在直线与圆曲线之间或大圆曲线与小圆曲线之间,由较大圆曲线向较小圆曲线过渡的线形,是道路平面线形要素之一。
1.缓和曲线的作用1)便于驾驶员操纵方向盘2)乘客的舒适与稳定,减小离心力变化3)满足超高、加宽缓和段的过渡,利于平稳行车4)与圆曲线配合得当,增加线形美观2.缓和曲线的性质为简便可作两个假定:一是汽车作匀速行驶;二是驾驶员操作方向盘作匀角速转动,即汽车的前轮转向角从直线上的0°均匀地增加到圆曲线上。
S=A2/ρ(A:与汽车有关的参数)ρ=C/sC=A2由上式可以看出,汽车行驶轨迹半径随其行驶距离递减,即轨迹线上任一点的半径与其离开轨迹线起点的距离成反比,此方程即回旋线方程。
3.回旋线基本方程即用回旋线作为缓和曲线的数学模型。
令:ρ=R,l h=s 则 l h=A2/R4.缓和曲线最小长度缓和曲线越长,其缓和效果就越好;但太长的缓和曲线也是没有必要的,因此这会给测设和施工带来不便。
缓和曲线的最小长度应按发挥其作用的要求来确定:1)根据离心加速度变化率求缓和曲线最小长度为了保证乘客的舒适性,就需控制离心力的变化率。
a1=0,a2=v2/ρ,a s=Δa/t≤0.62)依驾驶员操纵方向盘所需时间求缓和曲线长度(t=3s)3)根据超高附加纵坡不宜过陡来确定缓和曲线最小长度超高附加纵坡(即超高渐变率)是指在缓和曲线上设置超高缓和段后,因路基外侧由双向横坡逐渐变成单向超高横坡,所产生的附加纵坡。
4)从视觉上应有平顺感的要求计算缓和曲线最小长度缓和曲线的起点和终点的切线角β最好在3°——29°之间,视觉效果好。
《公路工程技术标准》规定:按行车速度来求缓和曲线最小长度,同时考虑行车时间和附加纵坡的要求。
5.直角坐标及要素计算1)回旋线切线角(1)缓和曲线上任意点的切线角缓和曲线上任一点的切线与该缓和曲线起点的切线所成夹角。
βx=s2/2Rl h(2)缓和曲线的总切线角β=l h/2R.180/л2)缓和曲线直角坐标任意一点P处取一微分弧段ds,其所对应的中心角为dβx dx=dscosβxdy=dssinβx3)缓和曲线常数(1)主曲线的内移值p及切线增长值q内移值:p=Y h-R(1-cosβh)=l h2/24R切线增长值:q=X h-Rsinβh=l h/2-lh3/240R2(2)缓和曲线的总偏角及总弦长总偏角:βh=l h/2R总弦长:C h=l h-l h3/90R2O为圆曲线的圆心,圆曲线所对圆心角(等于公路偏角)。
与缓和曲线及其平行线有关的面积计算

!
平
&(($
(曲&
"
"
, % , $ , 1! //3-/ (!!3/-4
1 1
!
"
(1
#
)
,)
缓和曲线平行线的弓形面积的计算 缓和曲线平行线的弓形面积等于弓形两端点
( 平& $,+ $ , !1
$
)
,)
连线与 ’ 轴 间 的 梯 形 面 积 减 去 两 端 点 间 弧 段 与 ’ 轴间的曲边梯形面积 ! 即
情况 " 但推导其面积公式却无需顾及这些 % 对图 & 所示的坐标系所推的面积公式 " 必然适用于各种情 况的缓和曲线弓形面积计算 " 因图形的面积与它的 偏向及所在坐标系无关 %
+内 #+* ’289:! ,内 #,* %2;<8!
图 &am289:! ,外 #,* +2;<8!
sp的面积显然这时的道路面积仍然可以通过相应折点用直线连接构成多边形的面积加减曲线弓形面积得到但运用缓和曲线平行线间面积公式却简单得多文中首先列出缓和曲线平行线间面积公式在此基础上避开微积分求积方法运用简单数学方法推导出缓和曲线平行线弓形面积公式从而较为完整地解决了与缓和曲线平行线有关的面积计算问题p缓和曲线平行线间面积计算模型文献upvamp
(矩& % $’) +$ *+,!
$
) ,)
,)
(弓& ( &#平 $# 平 $&’平+’平 $%(曲 1
) * * ) ) ) * *
&(1$
( 梯& ( &#) %$%#内 $&’) +’ 内 $& 1
缓和段曲线参数及超高、加宽计算

第三节缓和段一、缓和曲线缓和曲线是设置在直线与圆曲线之间或大圆曲线与小圆曲线之间,由较大圆曲线向较小圆曲线过渡的线形,是道路平面线形要素之一。
1.缓和曲线的作用1)便于驾驶员操纵方向盘2)乘客的舒适与稳定,减小离心力变化3)满足超高、加宽缓和段的过渡,利于平稳行车4)与圆曲线配合得当,增加线形美观2.缓和曲线的性质为简便可作两个假定:一是汽车作匀速行驶;二是驾驶员操作方向盘作匀角速转动,即汽车的前轮转向角从直线上的0°均匀地增加到圆曲线上。
S=A2/ρ(A:与汽车有关的参数)ρ=C/s C=A2由上式可以看出,汽车行驶轨迹半径随其行驶距离递减,即轨迹线上任一点的半径与其离开轨迹线起点的距离成反比,此方程即回旋线方程。
3.回旋线基本方程即用回旋线作为缓和曲线的数学模型。
令:ρ=R,lh=s 则 lh=A2/R4.缓和曲线最小长度缓和曲线越长,其缓和效果就越好;但太长的缓和曲线也是没有必要的,因此这会给测设和施工带来不便。
缓和曲线的最小长度应按发挥其作用的要求来确定:1)根据离心加速度变化率求缓和曲线最小长度为了保证乘客的舒适性,就需控制离心力的变化率。
a1=0,a2=v2/ρ,as=Δa/t≤0.62)依驾驶员操纵方向盘所需时间求缓和曲线长度(t=3s)3)根据超高附加纵坡不宜过陡来确定缓和曲线最小长度超高附加纵坡(即超高渐变率)是指在缓和曲线上设置超高缓和段后,因路基外侧由双向横坡逐渐变成单向超高横坡,所产生的附加纵坡。
4)从视觉上应有平顺感的要求计算缓和曲线最小长度缓和曲线的起点和终点的切线角β最好在3°——29°之间,视觉效果好。
《公路工程技术标准》规定:按行车速度来求缓和曲线最小长度,同时考虑行车时间和附加纵坡的要求。
5.直角坐标及要素计算1)回旋线切线角(1)缓和曲线上任意点的切线角缓和曲线上任一点的切线与该缓和曲线起点的切线所成夹角。
βx=s2/2Rlh(2)缓和曲线的总切线角β=lh/2R.180/л2)缓和曲线直角坐标任意一点P处取一微分弧段ds,其所对应的中心角为dβxdx=dscosβxdy=dssinβx3)缓和曲线常数(1)主曲线的内移值p及切线增长值q内移值:p=Yh-R(1-cosβh)=lh2/24R切线增长值:q=Xh-Rsinβh=lh/2-lh3/240R2(2)缓和曲线的总偏角及总弦长总偏角:βh=lh/2R总弦长:Ch=lh-lh3/90R2O为圆曲线的圆心,圆曲线所对圆心角(等于公路偏角)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4 铁道勘察 2004年第6期 缓和曲线平行线的通用参数方程及应用
李全信 (郑州市规划勘测设计研究院,河南郑州450052) The General Parametric Equations of the Lines Parallel to Easement Curve and Its Application
摘要基于缓和曲线平行线的几个特性,推出了缓平线弧长计算的通用公式,给出了缓平线 以其中线或自身弧长为变量的通用参数方程,从而为其理论研究及测设奠定了坚实的基础,通过算 例计算验证了通用参数方程的正确性。
关键词缓和曲线缓平线参数方程弧长 测设 现代道路和桥梁工程中,经常涉及到与中线相平行 的边线即线路平行线的测设问题,因此,研究线路平行 线理论及其测设是线路测设理论的重要内容,是新形 势下线路测设内容的重要拓展。线路曲线通常由直 线、圆曲线和缓和曲线组成,因而线路平行线就相应由 直线平行线、圆曲线平行线和缓和曲线平行线构成。 由于直线和圆曲线的平行线仍为直线和圆曲线,即其 性质不变,因而其测设可直接套用相应中线的测设方 法;而缓和曲线平行线(以下简称缓平线)由于不再是 螺旋线…,因此其测设方法不可能再套用缓和曲线的 测设理论。缓和曲线的各种测设方法(偏角法、支距 法、坐标法等)都是基于其参数方程的建立,因此,研究 缓平线的测设方法也必须首先建立缓平线的参数方 程。文献[2]虽已给出缓平线的参数方程,但这些公式 不通用,问题在于推导它们时仅考虑了缓和曲线的一 种常用形式。事实上,缓和曲线作为连接直线与圆曲 线或不同半径圆曲线的过渡曲线,有完整缓和曲线和 不完整缓和曲线之分;按线路方向连续计算或测设,又 有从大半径到小半径(正向)和从小半径到大半径(逆 向)之分。缓和曲线的这种特性,决定了缓平线也存在 类似的问题,因此,基于缓和曲线的通用参数方程推导 收稿日期:20o4—09—27 第一作者简介:李全信(1963一),男,教授级高级工程师,主要从事GPS及 线路平行线研究工作。 出缓平线的通用参数方程就显得很有必要。本文给出 的缓平线以其中线弧长为变量的通用参数方程和以其 自身弧长为变量的通用参数方程可满足实际工作中各 种不同需要。
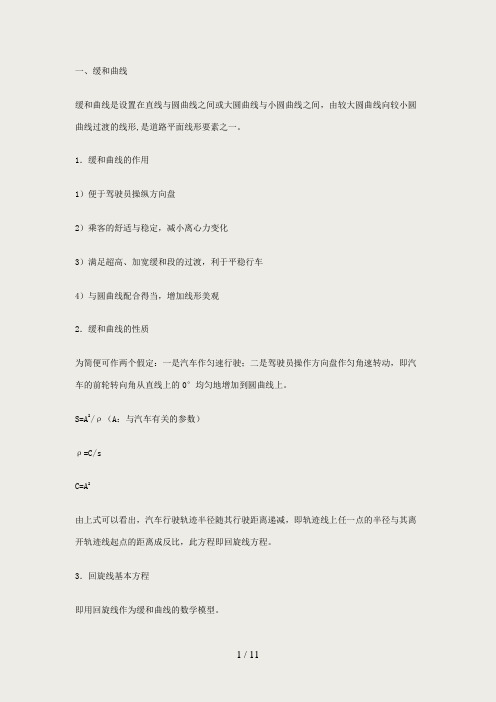
1缓和曲线平行线的几个特性 缓平线作为线路中线缓和曲线段的平行线,在数 学上又叫等距曲线,它是由中线上每一点沿该点法线 方向移动相同距离所得新点的轨迹。缓平线与中线相 比具有以下特性l_2J: ①缓平线与中线的对应点具有相同的法线。 ②缓平线与中线对应点问的距离处处相等。 ③缓平线不是螺旋线,虽然它仍然起到连接直线 与圆曲线或两个不同半径圆曲线的作用,但它已不是 原来意义上的“缓和曲线”了。 ④缓平线有完整缓平线和不完整缓平线之分,又 有正向和逆向之分。完整缓平线连接直线和圆曲线的 平行线,不完整缓平线连接两个不同半径圆曲线的平 行线。 ⑤缓平线具有左偏右偏、左边右边、内侧外侧之 分。 文献[2]分析认为,描述缓平线相对中线的大致形 状仅需偏向、边向和侧向三者之任两项即可。考虑到 习惯和方便,本文以偏向和边向两个符号函数来表示 缓平线,分别设为:P=-T-1,B=-Y-1。P:-T-1表示缓 平线的偏向,当曲线左偏时取一1,右偏时取+1;B
维普资讯 http://www.cqvip.com 缓和曲线平行线的通用参数方程及应用:李全信 5 :干1表示缓平线的边向,当缓平线位于中线的左边时 取一1,位于右边时取+1。运用上述符号函数,即能科 学地、唯一地确定缓平线的各种参数,推导出通用的各 种关系式。 2 缓和曲线平行线弧长计算的通用公式 0 图1 缓和曲线平行线示意图 如图l,设缓和曲线(完整或不完整)起点 的曲 率为 ,桩号为 ;终点B的曲率为 ,桩号为L ,则 缓和曲线的曲线长Ls=l 一 l。位于缓和曲线上、 且距起点 弧长为f的任意点i的曲率 可由下式唯一 确定 , K=K4+ ( 一 ) 即K: + (1) S 设任意点i的曲率半径为p,根据缓平线特性② 知,缓和曲线上i对应点i 的曲率半径为 lD平=lD—PBD (2) (2)式中,D为缓平线平移距。由缓平线特性① 知,缓和曲线i点处的微弧df与其对应点i 的微弧 df平存在如下关系式 d (3) p p平 将(2)式代人(3)式得 df平=(1一PBDK)dl (4) 将(1)式代入(4)式得 dl平:(1一PBDKa一朋 f)df (5) L,S 对上式求定积分可得 f平:f—PBD(Kfl+ f ) (6) (6)式即为用中线弧长f计算缓平线弧长f平的通 用公式,它适用于缓和曲线的各种情况。(6)式中,当 0, :1/R时,表示此缓和曲线为连接直线与 半径为 的圆曲线的完整缓和曲线,此时
f一朋 f (7) (7)式即为文献[3]和文献[5]给出的完整缓和曲 线平行线弧长计算公式(文献[3]中的(6)式,文献[5] 中的(6)式)。 对完整缓和曲线,已知一段弧长5及该弧起点 到ZH点的弧长f ,则上述通用公式(6)可作适当简化。 根据缓和曲线性质可知K4=顽la则K
将这些关系及f=S代人(6)式不难得到 f平=S一 DS(2I +5) (8) 此式即为文献[5]中的(12)式。 (7)式与(8)式的推出从另一方面验证r缓和曲 线平行线弧长计算通用公式的正确性与概括性。(6) 式为缓平线参数方程的建立奠定了基础。
3 缓和曲线平行线以其中线弧长为变量的通 用参数方程
缓平线总是相对于中线而占的,因此多数情况 下,缓平线的测设是以中线弧长为变量的。找出缓平线 以其中线弧长为变量的参数方程,其实质是给出中线 上任一点i在线路统一坐标系中的坐标计算通式。 图1中i 的坐标( 平, )可通过坐标i(X,y)与 该点的切线角a由下式求得[ ] 平=X—BDsina1 y :y+BDcosa j ‘9)
式中,D为缓平线与中线的间距;a已由文献[7] 给出,换成P、B符号函数,其通用关系式为
d:dA+P( f+ f ) (10) 式中,a 为缓和曲线起点 在线路坐标系的切线 方位角。(9)式中 、y为以中线弧长f为变量的计算 式,文献[7]、[8]已运用Gauss型数值积分给出,考虑 到P、B符号函数,其公式形式为
: +f cos +P(KAEI+ ] l,: +f 5 sin +P(KAVKAVil+ ]l,= +f 。R sin + + f )]
(9)式~(1 1)式可归纳如下
维普资讯 http://www.cqvip.com 6 铁道勘察 2004年第6期 平: Ricos[ P(KAV ̄f+ f2)一鼢inr P(KAf+ gABf2)] Risin[ P(K4Vif+ f2)+BDcos +P( f+ gABf2)] 显然,利用(12)式即可实现给出中线一个弧长2, 可计算出缓平线上相应点的坐标。因此(12)式即为缓 平线以其中线弧长f为变量的通用参数方程。由于 (12)式所用到中线参数方程是Gauss.Legendre公式, 因此(12)式也可称为缓平线的Gauss.Legendre参数方 程。理论与实例均证明Is],上式适应于各种情况下的缓
平线坐标计算,其精度优于±I mm。 (12)式中的 和 为固定常数,其数值为: R1=R5=0.I 18 463 442 5, R2=R =0.239 314 335 2 R3=0.284 444 444 4. V1=1一V5:0.046 910 077 0 V2=1一v4:0.230 765 344 9. V3=0.5 4 缓和曲线平行线以其自身弧长为变量的通 用参数方程 直接推导缓平线以其自身弧长f平为变量的参数方 程十分困难,对此文献[2]、[3]已有分析讨论。事实上, 由于已经找到了缓平线以其中线弧长f为变量的参数 方程,因此,只要能找出f以f平表达的公式,就相当于找 到了缓平线以其自身弧长f平为变量的参数方程。 (6)式已给出了以中线弧长f求解缓平线弧长f平 的关系式。将该式中的f平看作自变量,f看作因变量, 并令Q=( 一Ka)/2Ls,解(6)式得 f= ̄OSQ[1一PBDKA一 (1一PBDKA) 一4PBDQI ̄] (13) 显然,已知缓平线一个弧长f平,可由(13)式求得一个 弧长2,进而由(12)式即可求得缓平线上一点在线路统一 坐标系中的坐标( 平,y平),因此(13)式与(12)式的组合 即为缓平线以其自身弧长为变量的通用参数方程。 5 算例计算 图2为某喇叭型立交“水滴形”环圈匝道,其曲线 部分由5条曲线元组成,各曲线元的线段长及曲率半 径见表1。A点的坐标为(3 862.702 m,4073.133 m),该 点的切线方位角为60 ̄11 26 ,左平行线距中线距离为 10 ITI,现求平行线间距20 m弧长的各点坐标值及切线 方位角。 (12) 图2“水滴形”环圈匝道 表1 线段已知数据 m 线段名称 曲线类型 线段长及曲率半径 A 完整缓和曲线 L=64.5 日C 圆曲线 L:101.37.R=126 CD 非完整缓和曲线 ,J:6l 435 D£ 圆曲线 ,J=80.634.R=60 EF 完整缓和曲线 L:73.723 应用据(13)式与(12)式组合编写的程序计算出 各桩号缓平线点的坐标列于表2。为保持曲线数据的 连续性,表2还列出了圆曲线平行线段部分点的坐标。 表2 左平行线坐标及切线方位角计算 名称 平行线桩号 /m /m d平/(。¨ ) A (zH、 O+220 3 871.379 4 068.162 60 ll 26 O+240 3 881.18l 4 o85.595 6l 34 01 O+26o 3 89o.148 4 103.467 65 34 08 B (HY1) O+287.()59 3 899.457 4 128.843 74 5l 20 O+32O 3 904.147 4 l61.368 88 44 0o O+36o 3 899.180 4 20o.913 1O5 35 o7 C (YH1) O+396.474 3 884.814 4 234.320 l2O 57【)5 0+420 3 870.847 4 253.20l L32 36 l7 O+440 3 855.859 4 266.383 l45 O6 58 D ( ) O+465.466 3 833.000 4 277.337 164 15 09 O+480 3 8l8.703 4 279.8o7 176 O8 56 O+52o 3 78o.184 4 271.254 208 53 2O E (YH2) O+559.539 3 752.630 4 243.63l 241 l5 O8 0+58O 3 745.333 4 224.578 256 l3 55 O+600 3 742.566 4 204.802 267 12 ll O+620 3 742.92l 4 l84.8l8 274 O6 53 F (月Z) 0+639.406 3 744.836 4 165.508 267 27 09 (下转第10页)