直流电机的电力拖动(3)
第二部分(直流电机的电力拖动-思考题与习题)Word版

第二部分直流电机的电力拖动思考题与习题1、什么叫电力推拖动系统?举例说明电力拖动系统都由哪些部分组成。
2、写出电力拖动系统的运动方程式,并说明该方程式中转矩正、负号的确定方法。
3、怎样判断运动系统是处于动态还是处于稳态?4、研究电力拖动系统时为什么要把一个多轴系统简化成一个单轴系统?简化过程要进行哪些量的折算?折算时各需遵循什么原则?5、起重机提升重物与下放重物时,传动机构损耗由电动机承担还是由重物承担?提升或下放同一重物时,传动机构的效率相等吗?6、电梯设计时,其传动机构的上升效率η<0.5,若上升时η=04,则下降=15N·m,则下降时的负载时的效率η是多少?若上升时负载转矩的折算值TL转矩折算值为多少?7、从低速轴往高速轴折算时,为什么负载转矩和飞轮矩都要减小?8、起重机提升某一重物时,若传动效率小于0.5,那么下放该重物时传动效率为负值,此时的特理意义是什么?9、生产机械的负载转矩特性常见的哪几类?何谓位能性负载?10、表1中所列各电力拖动系统的数据不全,请通过计算把空格填满,计算时忽略电动机的空载转矩。
表14 17.6 128 0.85 85 78 5.5 16.5 减速11、表2所列电动机拖动生产机械在稳态运行时,根据表中所给数据,忽略电动机的空载转矩,计算表内未知数据并填入表中。
表2生产机械切削力或重物重F,G/N切削速度或升降速度v/m·s-1电动机转速n/r·min传动效率负载转矩TL/N·m电磁转矩Tem/N·m刨床3400 0.42 975 0.80 起重机9800 提升1.4 1200 0.75下降1.4电梯1500 提升1.0 950 0.42下降1.012、如图所示的运动系统中,已知n1/n2=3,n2/n3=2, GD21=80N·m2,GD22=250N·m2,GD 23=750 N·m2,I’L=90 N·m2,(反抗转矩),每对齿轮的传支效率均为η=0.98,求折算到电动机轴上的负载转长和总飞轮矩。
电机学(刘颖慧)课件第3章直流电动机的电力拖动基础[48页]
![电机学(刘颖慧)课件第3章直流电动机的电力拖动基础[48页]](https://img.taocdn.com/s3/m/02aefbf5d1f34693daef3e9a.png)
电机学 Electric machinery
3.1 电力拖动系统的运动方程式和负载转矩特性
❖ 1.运动方程式
+
U
-
J
d
dt
Tem
TL
❖ 转动惯量:
J GD2 mD2 4g 4
M
Tem n
TL
图3.1.1 电动机与工作机构
Department of Electrical Engineering, HUT
电机学 Electric machinery
❖ 2.负载的转矩特性 ❖ a.恒转矩负载
n n
o
TL
o
TL
3.1.2 反抗性恒转矩负载特性
图3. 1. 3 位能性恒转矩负载特性
Department of Electrical Engineering, HUT
电机学 Electric machinery
0
T
图3. 2. 4
电动机不同电压机械特性
Department of Electrical Engineering, HUT
电机学 Electric machinery
❖ 减弱励磁磁通时的人为特性:
❖ 当 U UN R Ra 只减弱励磁磁通
n
UN Ce
Ra Ce
Ia
n
n02 2 n01 1 2 1 N
第3章 直流电动机的电力拖动基础
电机学 Electric machinery
❖ 电力拖动的定义:用各种电动机作为原动机拖动生产机械, 产生运动,电力拖动也称为电力传动。直流电力拖动是由直 流电动机来实现的。
电源
控制设备
电动机
工作机构
Department of Electrical Engineering, HUT
第8章直流电机的电力拖动03
n n0
b
a
1
O
c d
TL
T
T 始终没有改变方向。
制动运 行状态
2
大连理工大学电气工程系
8.4 他励直流电动机的制动
制动效果 Rb →特性 2 斜率 →下放速度 。
n n0
a
b
1
Rb 的选择 (各量取绝对值) Ua+Ed Ra+Rb = Iad Ua+CEΦ nL 稳定运行 d 点 = T / CTΦ 的 E 和 Ia CTΦ = (Ua+CEΦ nL) TL-T0
a
1
TL
T 能耗制 动运行 2
c
大连理工大学电气工程系
8.4 他励直流电动机的制动
+ Ia Ua -
T
TL M
+ Uf - Rb
Ia E
T TL
M
+ Uf
E
n
n
制动过程 Ia T
-
电动状态 TL M + Uf -
Rb
E
n 能耗制动运行 反向起动
大连理工大学电气工程系
8.4 他励直流电动机的制动
大连理工大学电气工程系
8.4 他励直流电动机的制动
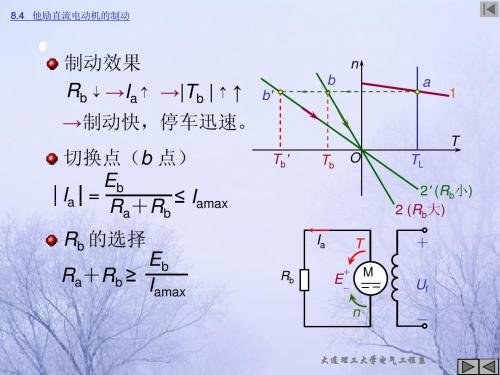
制动效果 Rb →特性 2 斜率 →制动转矩 →制动快。
(各量取绝对值)
2' (Rb小) 2 (Rb大) n b n0 b'
a
1
T'
T
O
TL
T
Rb 的选择 Ra+Rb≥
-n0
Ua +Eb
Iamax
制动瞬间 b 点的 E
- Ia Rb
+
M
Ua
+
c点
电机与电力拖动基础教程第3章(3)
(0,-n0),斜率为b,与电动状态时 电枢串入电阻RW时的人为机械特性 相平行的直线。
b
Ra RW CeCT Φ 2
第3章
返 回
上 页
下 页
(3)电压反接制动过程 电压反接时,n不能突变,工 作点由第一象限A点平移至第 二象限B点。T=-TB<0,T与 TL共同作用使电机减速,直至 n=0。反接制动过程结束。 如果电机拖动反抗性负载,n=0时, T=-TC>-TL,电动机反向电动(第三 象限)直至T=-TL(D点),电动机稳定 运行。
第3章
返 回
上 页
下 页
2.电动势反接的反接制动 电动势反接的反接制动仅 适用于位能性恒转矩负载, 又称倒拉反接制动或转速 反向反接制动。 (1)电动势反接制动的实现
当开关K闭合,电动机运行
于电动状态。 当开关K断开,电枢回路串 入较大电阻RW,使n=0时, 电磁转矩小于负载转矩,电动 机反向加速,T与n反向,进 入电动势反接的反接制动运行。
Ra RW n T nC 2 CeCT ΦN
T=TL
CeCT Φ n RW Ra TL
2 N C
第3章
返 回
上 页
下 页
5.能耗制动பைடு நூலகம்点
(1)制动时 U=0,n0=0 ,直流电动机脱离电网变成直流发电 机单独运行,把系统存储的动能或位能性负载的位能转变 成 电能( EaIa)消耗在电枢电路的总电阻上I2(Ra+RW)。 (2)制动时, n与T成正比 ,所以转速n 下降时,T也下降,故 低速时制动效果差,为加强制动效果,可减少RW,以增大 制动转矩T ,此即多级能耗制动 C Φ n T CT ΦN I a CT ΦN e N , T n Ra RW
电机与拖动 第3章 直流电机的电力拖动
B、他励直流电动机的常用的起动方法
为了获得足够大的起动转矩的同时降低起动电流,起动时一般应按照如下 步骤进行:(1)首先在励磁绕组中加入额定励磁电流,以建立满载主磁场;(2) 待主磁场建立之后再加入电枢电压。
电枢回路串电阻起动
直流电机的 起动方法
降压起动
a、电枢回路串电阻起动
3.18 直流电动机人工起动器的电气原理图
B、电力拖动系统的稳定运行条件
定义: 对于稳态运行的电力拖动系统,若受到外部扰动(如电网电 压的波动,负载转矩的变化等)后系统偏离原来的稳态运行点。一 旦干扰消除,系统能够恢复到原来的稳态运行点,则称系统是稳定 的;否则,系统是不稳定的。
图3.13 电力拖动系统的稳定运行分析
电力拖动系统稳定运行的条件为:
B、多轴电力拖动系统的折算
a、折算的概念
图3.3 多轴电力拖动系统的简化
折算的原则是:确保折算前后系统所传递的功率或系统储存的动能 不变。
b、折算的方法
1) 机械机构的转矩折算
折算时需考虑电动机和生产机械的工作状态。现分析如下: (1)当电动机驱动机械负载时,传动机构的损耗是由电动机承担的。于是有:
TL TL Lt
根据上式,折算后的负载转矩为:
TL
TLt TLt j ( ) L
(3-5)
2)直线作用力的折算
折算时同样应考虑功率的流向问题。 图3.4给出了电机拖动起重机负载实现升降运动的示意图。
图3.4 电机带动起重机负载的示意图 (1)当重物提升时,传动机构的损耗自然由电动机承担。于是有: 又
Tem n
nA
TL n
(3-15)
nA
上述结论可以通过系统的动力学方程式或上图的分析求得。其 物理意义是:当在A点处于稳定运行系统受到外部扰动使得转速增 加时,负载转矩的增加应大于电磁转矩的增加,系统才能够减速, 回到原来的运行点。此时,系统在A点处是稳定运行的。
电机拖动第三章

由图可见,位能性恒转矩负载的转矩不随转速 方向的改变而改变。无论电机正、反转,负载转 矩始终为单一方向。
B、通风机负载特性 特点:
负载转矩基本上和转速的平方成正比,
即
TL Kn
2
例:通风机、水泵及油泵等,负载转动时, 其中空气、水、油等介质对机器叶片的 阻力基本上和 2 成正比。
n
C、恒功率负载的转矩特性 恒功率负载:如 车床、恒张力卷 取机,随着卷取 直径增大,力矩 增大。但为了保 持张力不变,线 速度应不变,相 应地转速就要降 低,结果是功率 不变。
2
当电机工作在A点时,
TemA TLA
则有:
GD2 dn Tem TL 375 dt
考虑到微小增量为在A点的偏 导数乘上 n ,上式为
Tem n
nA
TL n n
nA
GD2 dn n 375 dt
整理为线性微分方程
Tem n TL n
为了简化计算,把多轴复杂系统等效成
一个单轴简单系统,方法是把电机轴后面 的传动机构和工作机构部分(如下图中虚
线框部分所示)都折算到电机轴上,用一
个等效负载来代替它,这样就可以用单轴
系统的运动方程式来研究多轴系统,这时
运动方程式为
折算
折算方向:一般是从生产机械轴向电动 机轴折算。原因是研究对象是电动机。 且电动机轴一般是高速。根据传送功率 不变的原则,高速轴上的负载转矩数值 小。 折算的原则是:确保折算前后系统所传 递的功率或系统储存的动能不变。
例3-2: 用稳定运行的概念判断图中 的A点是否为稳定运行点?
系统原在A点平衡运转
TL1 TL 2
n nA
Tem TL1
第三章 直流电动机的电力拖动
U
Ec R1
两级起动时
I1 R2 R1 I 2 R1 Ra
推广到m级起动的一般情况
I1 Rm Rm1 R2 R1
I 2 Rm1 Rm2
R1 Ra
I1 / I2 称为起动电流比
30
R1 Ra
R2 R1 Ra 2
Rm1
Rm 2
Ra
m1
Rm Rm1 Ra m
17
B、风机与泵类负载的转矩特性
通风机负载转矩与转速的大小有关,基本上与转速的平方成正比
特点: TL Kn2
通风机类负载的转矩特性
如实际生产机械中的水泵、油泵、离心式通风机等其介质 对叶片的阻力基本上与转速的平方成正比。
18
C、恒功率负载的转矩特性
特点:
TL
k
1 n
恒功率负载的转矩特性
在不同转速下,负载转矩基本上与转速成反比,其功率基本
恒转矩负载 大多数生产机械可归纳为: 风机与泵类负载
恒功率负载
14
各类生产机械的负载转矩特性 A、恒转矩负载的转矩特性
特点: 负载转矩不受转速变化的影响。在任何转速下,负载转矩
总是保持恒定或大致恒定。
反抗性恒转矩负载 恒转矩负载
位能性恒转矩负载
15
(1) 反抗性恒转矩负载的转矩特性如下图所示。
反抗性恒转矩负载的转矩特性
22000 Ω
0.174Ω
Ce N
UN
I N Ra nN
220 116 0.174 V/(r/min) 1500
0.133 V/(r/min)
理想空载点 Te 0
n
n0
UN
Ce N
220 r/min 1650r/min 0.133
电机与电力拖动 第3章 直流电机的基本理论讲解
3.6 直流电动机稳态运行时的基本方程式和工作特性(重点)
3.6.1 直流电动机稳态运行时的基本方程式(电压、转矩、功率)
1 电压平衡方程式
+ Ia
If +
U Ea M
U
-
-
2 转矩平衡方程式
励磁电路: U = Rf If 电枢电路: U= Ea + Ra Ia
U: 端电压;
Ea :电枢电动势; Ra :电枢回路电阻; Rf :励磁回路电阻; U>Ea时:电动机; U<Ea时:发电机;
If
Ia
Ea : 感应电动势
Uf
Ea MU
Ia :电枢电流 Ra :电枢电阻 I f :绕组电流
Rf Ra
Rf :绕组电阻
他励 I I N I f Ia
U UN Ea IaRa
U UN I f Rf
Ra
If
U
M
Rf
并励
Ea
I IN I f Ia U UN Ea IaRa
P
Ea
I
;
a
n ::转机速械;角速度, (2n ) / 60;
转矩的求法:T CT Ia
CT : 转矩常数CT ( pN ) /(2a); p : 磁极对数;
Ia:电枢电流I N ;
题2:一台他励直流电动机的额定数据为PN=17kW,UN=220V,nN=1000r/min, IN=92A,电枢绕组的电阻Ra=0.2Ω,电刷压降2△Ub=2V。试计算:(1)电 动机的额定电磁转矩。(2)理想空载转速和实际空载转速。(3)电动机的 输出转矩保持为额定值不变,在电枢回路中串入0.3Ω电阻,求电动机转速。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
g Ra
e
c
Ra Rst 1 R1
n1
TL IL
Ra Rst 1 Rst 2 R2
Ra Rst 1 Rst 2 Rst 3 R3
T1 I1
1
a
T2 I2
Tem I
石家庄动
设对应转速n1、n2、n3时电势分别为Ea1、Ea2、Ea3,则有: b点 R3 I 2 U N Ea 1 在已知起动电流比β和电枢电 阻前提下,经推导可得各级串联电 阻为:
Ra RS UN n Tem 2 C eΦN C e CT Φ N
n
n0
β 特点:1)n0 不变, 变大;
Ra
Ra RS Tem
石家庄铁路职业技术学院信息工程系
2) β 越大,特性越软。
单元2 直流电动机的电力拖动
2、降低电枢电压时的人为特性 保持 R Ra ,Φ ΦN不变,只改变电枢电压时的人为特性:
T (4)计算额定工作点: N CT ΦN I N , n nN
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.2.4 电力拖动系统稳定运行条件 处于某一转速下运行的电力拖动系统,由于受到某种扰动, 导致系统的转速发生变化而离开原来的平衡状态,如果系统能在 新的条件下达到新的平衡状态,或者当扰动消失后系统回到原来 的转速下继续运行,则系统是稳定的,否则系统是不稳定的。 在A点,系统平衡 Tem TL 扰动使转速有微小增量,转速由n A T 上升到nA ,em TL。 扰动消失,系统减速,回到 A 点运行。 扰动使转速有微小下降,由 n A下降 到 n ,Tem TL 。 A
n
nA nA nA
A
Tem
0
扰动消失,系统加速,回到 A 点运行。
TL
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
在B点,系统平衡 Tem TL
n 扰动使转速有微小增量,转速由nB n B 上升到n ,em TL,系统加速 。 B T 即使扰动消失,也不能回到 B 点运行。 B n 扰动使转速有微小下降,由 nB下降 n B ,Tem TL ,系统减速。 到 nB
Ra UN n Tem 2 C eΦ C e CT Φ
n02 n
n01
Φ2
Φ1
Φ2 Φ1 ΦN
n0
n 特点:1)弱磁, 0增大;
β 2)弱磁, 增大
ΦN
Tem
Tk 2 Tk 1 Tk
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.2.3
机械特性求取
二、人为特性的求取 一、固有特性的求取 已知 PN ,U N, I N , nN ,求两点:1)理想空载 ) 点 (Tem 0 , n n0 )和额定运行(Tem TN , n nN 。 在固有机械特性 具体步骤: 方程 n n0 βTem 1 2 U N I N PN 的基础上,根据人为 (1)估算 Ra : Ra ( ~ ) 2 2 3 IN 特性所对应的参数RS U N I N RN 或 或Φ 变化,重新 U (2)计算 C eΦN 和 CT ΦN : C e Φ N nN 计算n0 和 β ,然后得 CT ΦN 9.55CeΦN 到人为机械特性方程 UN 式。 T (3)计算理想空载点: em 0 , n0 C e ΦN
Ra UN n Tem 2 C e ΦN C e CT ΦN
由于电枢电阻很小,特性曲线斜率很小,所以固有机械特性 是硬特性。 二、人为机械特性 当改变U或 Ra 或Φ 得到的机械特性称为人为机械特性。
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
1、电枢串电阻时的人为特性
保持 U U N ,Φ ΦN 不变,只在电枢回路中串入电阻 RS 的人为 特性
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.1电力拖动系统的运动方程式和负载转矩特性
2.1.1 电力拖动系统的运动方程式 一、运动方程式 电力拖动系统运动方程式描述了系统的 运动状态,系统的运动状态取决于作用在原 动机转轴上的各种转矩。 根据如图给出的系统(忽略空载转矩), 可写出拖动系统的运动方程式:
单元2 直流电动机的电力拖动
二、恒功率负载特性 恒功率负载特点是:负载转 矩与转速的乘积为一常数,即TL 与 n 成反比,特性曲线为一条双 曲线。
三、泵与风机类负载特性
负载的转矩TL 基本上与转 速 n 的平方成正比。负载特性 为一条抛物线。
n
n
理想的通 风机特性
实际通风 机特性
TL
TL0
TL
石家庄铁路职业技术学院信息工程系
N
n0 称为理想空载转速。
U R 实际空载转速 n0 T0 2 C e Φ C e CT Φ
Tem
T0
TN
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.2.2 固有机械特性和人为机械特性 一、固有机械特性 当 U U N ,Φ ΦN , R Ra 时的机械特性称为固有机械特性:
m
UN I 1 Ra
m 取整数
T1 T (5)计算转矩:T2 ,校验: 2 ( 1.1 ~ 1.3 )TL β
m 如果不满足,应另选T1 或 值并重新计算,直到满足该条件为止.
(6)计算各级起动电阻。
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.3.2
降压起动
当直流电源电压可调时,可采用降压方法起动。
为了限制起动电流,他励直流电动机通常采用电枢回路串 电阻或降低电枢电压起动。
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
2.3.1 电枢回路串电阻起动 一、起动过程 以三级电阻起动时电动机为例
n
S
U
S1 S 2
M
S3
nN
Tem I
n3
n0
h
f 3 d 2
b
g Ra
Ra Rst 1 Rst 2 Rst 3
起动时,以较低的电源电压起动电动机,起动电流随电源 电压的降低而正比减小。随着电动机转速的上升,反电动势逐 渐增大,再逐渐提高电源电压,使起动电流和起动转矩保持在 一定的数值上,保证按需要的加速度升速。 降压起动需专用电源,设备投资较大,但它起动平稳,起 动过程能量损耗小,因此得到广泛应用。
石家庄铁路职业技术学院信息工程系
Ra U n Tem 2 C e ΦN C e CT ΦN
n0
n
UN
n01
特点:1)n0随 U 变化, β 不变; 2)U不同,曲线是一组平行线。
U1 U N
U1
Tem
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
3、减弱励磁磁通时的人为特性
保持R Ra ,U U N 不变,只改变励磁回路调节电阻RSf 的人为特性:
单元2 直流电动机的电力拖动
2.1.2
负载的转矩特性
负载的转矩特性,就是负载的机械特性,简称负载特性。 一、恒转矩负载特性 恒转矩负载特性是指生产机械的负载转矩TL 与转速 n 无关 的特性。分反抗性恒转矩负载和位能性恒转矩负载两种。 1.反抗性恒转矩负载 2.位能性恒转矩负载
n
TL
n
TL
石家庄铁路职业技术学院信息工程系
B
Tem
即使扰动消失,也不能回到 B 点运行。 0 TL 电力拖动系统稳定运行的充分必要条件是: (1)必要条件:电动机的机械特性与负载的转矩特性必须有交点, 即存在 Tem TL dTem dTL (2)充分条件:在交点处,满足: 。 dn dn 或者说,在交点的转速以上存在Tem TL ,在交点的转速以下存 在 Tem TL
Rst 1 (β 1 ) Ra Rst 2 (β 1 ) βRa βRst 1 Rst 3 (β 1 ) β 2 Ra βRst 2 Rstm (β 1 ) β m 1 Ra βRstm 1
c点 R2 I1 U N Ea1
d点 R2 I 2 U N Ea 2 e点 R1 I1 U N Ea 2 f点 R1 I 2 U N Ea 3 g点 Ra I1 U N Ea 3
首先确定电动机处于电动状态时的旋转方向为转速的正方 向,然后规定:
(1)电磁转矩Tem 与转速 n 的正方向相同时为正,相反时为负。
(2)负载转矩 TL 与转速 n 的正方向相同时为负,相反时为正。
GD 2 dn (3)惯性转矩 的大小和正负号由Tem 和 TL 的代数和决定。 375 dt
石家庄铁路职业技术学院信息工程系
U
M
Tem
Tem TL J
dΩ dt
n
TL
dΩ 其中 J 为系统的惯性转矩。 dt
石家庄铁路职业技术学院信息工程系
单元2 直流电动机的电力拖动
运动方程的实用形式:
GD 2 dn Tem TL 375 dt 系统旋转运动的三种状态 dn 1)当 Tem TL 或 0 时,系统处于静止或恒转速运行状态,即处 dt 于稳态。
单元2 直流电动机的电力拖动
本单元主要介绍电力拖动系统的运动方程、负载转矩特性、 直流电动机的机械特性、起动、调速、制动等方法和物理过程。 2.1 电力拖动系统的运动方程和负载转矩特性 2.2 他励直流电动机的机械特性 2.3 他励直流电动机的起动 2.4 他励直流电动机的制动 2.5 他励直流电动机的调速
n
b点 R3 I 2 U N Ea 1
c点 R2 I1 U N Ea1