直升机的操纵原理
直升飞机飞行原理

直升飞机飞行原理直升机是一种垂直起降的飞行器,它可以在空中悬停、向前、向后、向左、向右飞行,还可以进行定点停留、低高度飞行、复杂地形涂毒、运输货物等,是一种非常灵活多变的飞行器。
那么,直升机是如何实现这种“绕不过去”的飞行方式的呢?下面,我们来了解一下直升机的飞行原理。
一、空气动力学基础不论是飞机还是直升机,它们都要靠空气动力学来实现飞行。
空气动力学是研究空气对物体的作用的学科。
在空气中,物体移动时,空气会对其产生阻力、升力和推力等作用。
在直升机的飞行中,最主要的就是升力了。
升力是空气对直升机产生的向上的支持力,使其能够腾空而起。
而产生升力的关键,则是由于在直升机的旋转叶片上产生了一个向下的气流,这个气流将气体压缩,使其速度加快,压力降低,形成低压区。
而直升机上方的空气则形成高压区,从而产生了升力。
二、基本构造1.机身部分:直升机的主体部分,其中装置有驾驶室、乘客和货物舱、发动机等。
2.旋翼部分:直升机最重要的部分,由主旋翼和尾旋翼组成。
3.主旋翼:是直升机上的最重要的部分,主要产生升力和推进力。
它是一组大型的可旋转叶片,可以轮流地在上下、左右和前后方向调整。
4.尾旋翼:又称为方向舵,主要负责平衡和转向直升机。
5.起落架:支撑直升机在地面或者水面上的装置。
三、飞行原理我们知道,飞机在飞行中通过翼面产生升力和推力来维持飞行。
而直升机则是通过旋翼来产生升力和推力,从而可以实现垂直起降和各种方向的移动。
正常飞行时,主旋翼的旋转速度越快,升力就越大。
主旋翼在旋转时还产生了空气流,对于尾旋翼而言,这种空气流就相当于一束强劲的风,从而也可以产生升力和推力,平衡直升机并控制飞行方向。
直升机的旋翼不仅可以产生升力和推力,还可以调整飞行方向。
当主旋翼向右旋转时,直升机就会向左飞行,反之亦然。
而尾旋翼则可以扭转调整直升机的飞行方向。
在直升机的飞行过程中,由于旋翼旋转的高速气流形成较大的后向力,所以需要加装平衡重量使其平衡。
直升机的飞控原理
直升机的飞控原理直升机的飞控系统是控制直升机飞行的核心部件,它的基本原理是通过对旋钮、操纵杆等操纵装置的操作转换成电信号,再通过电子设备对这些信号进行处理和控制,最终传达给直升机各个部位,实现对直升机姿态、航向、高度、速度等参数的控制。
直升机的飞控系统由多个部分组成,包括飞行总线、飞行控制计算机、电动操纵表面、液压操纵系统等。
飞行总线是连接飞行控制计算机和其他部件的通信系统,用于传输控制指令和接收状态信息。
飞行控制计算机是控制系统的核心,负责处理操纵装置转换成的电信号,根据飞行任务要求和飞行状态进行计算和控制,再通过飞行总线向其他部件发送控制指令。
直升机的飞控系统实现对姿态的控制主要是通过电动操纵表面和液压操纵系统来实现的。
电动操纵表面一般包括前翼、副翼和方向舵等,通过电机驱动改变表面的位置和角度,从而改变直升机的姿态。
液压操纵系统一般包括液压泵、液压缸和液压阀等,通过泵将液压油输送到缸中,使缸表面的活塞发生位移,进而改变操纵表面的位置和角度。
直升机的飞控系统还可以实现对航向、高度和速度等参数的控制。
航向控制主要是通过控制尾桨的转动来实现的。
尾桨通过尾桨马达驱动,可以改变直升机的航向。
高度控制主要是通过改变旋翼的推力来实现的。
旋翼的叶片角度可以通过电机驱动的系统或液压驱动的系统进行调节,从而改变旋翼的推力。
速度控制主要是通过改变旋翼的转速来实现的。
旋翼的转速可以通过燃油分配系统或液压调节系统来进行控制。
飞行控制计算机是直升机飞控系统的核心部件,它通过接收操纵装置的输入信号,根据飞行任务和状态信息进行计算和控制,最终向操纵表面和液压操纵系统发送控制指令。
飞行控制计算机一般具有实时计算、状态估计和故障处理等功能。
它可以实现对直升机的自动控制和稳定飞行。
总之,直升机的飞控系统是控制直升机飞行的关键部件,通过操纵装置的操作转换成电信号,然后通过飞行控制计算机进行处理和控制,最终传达给直升机各部件,实现对直升机的姿态、航向、高度、速度等参数的控制。
(完整版)直升机飞行操控的基本原理

直升机飞行操控的基本原理图 1 直升机飞行操纵系统- 概要图(a)(b)图2 直升机操纵原理示意图1.改变旋翼拉力的大小2.改变旋翼拉力的方向3.改变尾桨的拉力飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
1.右侧周期变距操纵杆3.左侧周期变距操纵杆2.可调摩擦装置4.橡胶波纹套5.俯仰止动件6.复合摇臂 7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件13.总距拉杆14.与复合摇臂相连接的拉杆15.伺服机构16.伺服机构(横滚+总距)17.伺服机构(俯仰+总距)18.可调拉杆图 3 直升机周期变距操纵系统(一)纵向操纵情况当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
直升机的操纵原理
周期变距操纵杆
随着电传、光传操纵技术的发展,座舱操纵机构也在向 新型侧杆操纵方式发展,即手操纵杆从驾驶员座位的中 央前方移至座位的右侧,并有可能与总距操纵杆和脚蹬 合而为一。其可能的形式有:
总距操纵是由驾驶舱内驾驶员座椅左侧的油门变距 杆控制。
自动倾斜器倾斜时桨距的周期性变化
在装有多片桨叶的旋翼上,倾斜盘的倾斜引起桨叶桨距变化,它 随旋翼转动而呈正弦变化规律,这种运动(周期变距)引起旋翼拉 力矢量的倾斜。
水平飞行,要使旋翼旋转平面倾斜,靠周期性改变桨距得到的.
φ
10°
0
90
尾桨距增大或减小
上下旋翼转速不同 则扭矩变化
左右旋翼前后倾不同, 则机头左或右转
单旋翼带尾桨
双旋翼纵列式
双旋翼共轴式
双旋翼横列式
桨距增大或减小
两旋翼的桨距同时增大或减小
单旋翼带尾桨
双旋翼纵列式
双旋翼共轴式
双旋翼横列式
(2)纵向操纵原理
直升机布局形式对旋翼纵向操纵的影响见图。共轴式和横列式 与单旋翼的纵向操纵方式相同,为桨叶锥体前倾。而纵列式应 控制前后旋翼的拉力且需满足:当TF·LXF<TR·LXR 时直升机下 俯;相反的控制将使直升机上仰运动。
锥角的存在,桨叶上的升力可分解为水平﹑垂直两个分量,各 桨叶升力的水平分量互相平衡,对垂直分量的合力R沿锥体轴 垂直于桨尖旋转平面。若改变气动力R的大小,将会引起直升 机的上升﹑下降或悬停。若使锥体倾斜(如图a所示前倾),则气 动力R随之前倾,对直升机构成下俯力矩,使机头下俯。同时,由 于存在R的水平分量Hs,使得直升机向前运动。同理,若使锥 体侧倾(见图b),直升机将一方面横滚,一方面沿侧向运动。
直升机的工作原理

直升机的工作原理
直升机的工作原理是利用主旋翼和尾推力来产生升力和动力。
主要包括以下几个部分:
1. 主旋翼:主旋翼是直升机最重要的部分,通常由三至六片可调节的旋翼叶片组成。
当发动机提供足够的动力使主旋翼快速旋转时,旋翼叶片会产生升力。
通过改变叶片的推力和螺旋桨角度,可以控制直升机的升力和姿态。
2. 尾推力:直升机的尾部有一根垂直的尾旋翼,它的作用是产生推力和水平方向的倾斜力。
通过改变尾旋翼的推力和方向,可以控制直升机的方向和平衡。
3. 方向舵:直升机的尾部还有一个水平的方向舵,用来控制直升机的左右转向。
通过改变方向舵角度,可以改变直升机的水平方向。
4. 发动机:直升机的发动机通常是内燃机或涡轮发动机,提供所需的动力和转动力给主旋翼。
5. 操纵系统:直升机的操纵系统包括操纵杆、脚踏板、控制杆等。
驾驶员通过操纵这些操纵设备来改变主旋翼和尾推力的推力、角度和方向,从而控制直升机的升力、姿态和飞行方向。
总结来说,直升机的工作原理通过旋转的主旋翼产生升力,通过尾推力和调整方向舵来控制飞行方向,通过发动机提供动力。
驾驶员通过操纵系统来控制这些机构,使直升机飞行在所需高度和方向上。
直升机飞行操控的基本原理
直升机飞行操控的基本原理图 1 直升机飞行操纵系统- 概要图(a)(b)图2 直升机操纵原理示意图1.改变旋翼拉力的大小2.改变旋翼拉力的方向3.改变尾桨的拉力飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
1.右侧周期变距操纵杆3.左侧周期变距操纵杆2.可调摩擦装置4.橡胶波纹套5.俯仰止动件6.复合摇臂 7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件13.总距拉杆14.与复合摇臂相连接的拉杆15.伺服机构16.伺服机构(横滚+总距)17.伺服机构(俯仰+总距)18.可调拉杆图 3 直升机周期变距操纵系统(一)纵向操纵情况当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
直升机前进原理
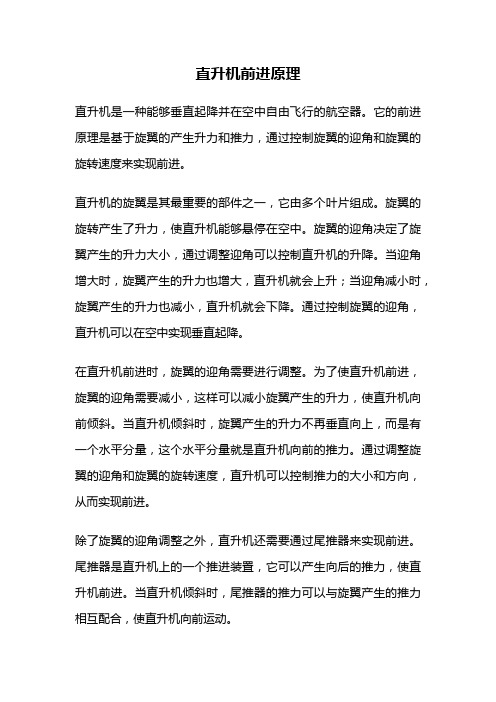
直升机前进原理直升机是一种能够垂直起降并在空中自由飞行的航空器。
它的前进原理是基于旋翼的产生升力和推力,通过控制旋翼的迎角和旋翼的旋转速度来实现前进。
直升机的旋翼是其最重要的部件之一,它由多个叶片组成。
旋翼的旋转产生了升力,使直升机能够悬停在空中。
旋翼的迎角决定了旋翼产生的升力大小,通过调整迎角可以控制直升机的升降。
当迎角增大时,旋翼产生的升力也增大,直升机就会上升;当迎角减小时,旋翼产生的升力也减小,直升机就会下降。
通过控制旋翼的迎角,直升机可以在空中实现垂直起降。
在直升机前进时,旋翼的迎角需要进行调整。
为了使直升机前进,旋翼的迎角需要减小,这样可以减小旋翼产生的升力,使直升机向前倾斜。
当直升机倾斜时,旋翼产生的升力不再垂直向上,而是有一个水平分量,这个水平分量就是直升机向前的推力。
通过调整旋翼的迎角和旋翼的旋转速度,直升机可以控制推力的大小和方向,从而实现前进。
除了旋翼的迎角调整之外,直升机还需要通过尾推器来实现前进。
尾推器是直升机上的一个推进装置,它可以产生向后的推力,使直升机前进。
当直升机倾斜时,尾推器的推力可以与旋翼产生的推力相互配合,使直升机向前运动。
直升机前进的速度和稳定性也与旋翼的旋转速度有关。
旋翼的旋转速度越快,直升机前进的速度就越快;旋翼的旋转速度越慢,直升机前进的速度就越慢。
通过控制旋翼的旋转速度,直升机可以调整前进的速度和稳定性。
直升机前进的原理是通过调整旋翼的迎角和旋翼的旋转速度来实现的。
通过控制旋翼的迎角,直升机可以产生向前的推力;通过控制旋翼的旋转速度,可以调整前进的速度和稳定性。
直升机前进的原理是复杂而精密的,它的实现离不开先进的航空技术和精湛的飞行技巧。
直升机的前进能力使其成为许多领域中不可或缺的工具,如救援、运输、勘察等。
直升机上的工作原理是什么
直升机上的工作原理是什么
直升机的工作原理是通过旋转机翼产生升力,推动机械驱动力来实现飞行。
具体包括以下步骤:
1. 旋翼产生升力:直升机通常配备一个或多个主旋翼,旋翼由数个可调节的桨叶组成。
当发动机提供动力,使旋翼以适当的速率旋转时,桨叶产生升力,向上推动直升机。
2. 控制俯仰:为了改变直升机的俯仰姿态(前后倾斜),可调节桨叶的角度。
当主旋翼前后倾斜时,升力的方向也会发生变化,从而使得直升机向前或向后倾斜。
3. 控制横滚:直升机的横滚姿态(左右倾斜)也可以通过旋翼桨叶的调整来实现。
当主旋翼的一侧上升,并与另一侧下降时,会产生一个横向推力,使得直升机向左或向右倾斜。
4. 推进力:为了提供向前飞行的推进力,直升机通常安装一个尾推装置,如旋转叶片的尾桨或尾喷气发动机。
这些设备产生推力,抵消直升机的阻力,使其能够在空中移动。
总的来说,直升机的工作原理基于旋转机翼产生升力和通过各种方式控制姿态来实现飞行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直升机的操纵原理
直升机的操纵原理
一、直升机空气动力特点 二、直升机操纵原理
直升机空气动力特点
➢ 直升机是一种由一个或多个水平旋转的旋翼 提供向上升力和推进力而进行飞行的航空器。
➢ 直升机具有大多数固定翼航空器所不具备的 垂直升降、悬停、小速度向前或向后飞行的 特点。
直升机空气动力特点
直升机的结构组成 1 旋翼 2 尾桨 3 机身 4 起落架 5 发动机 6 操纵机构
直升机操纵原理
➢ 直升机驾驶员座舱主要 的操纵机构是:驾驶杆 ( 又称周期变距杆) 、脚 蹬、油门总距杆。 此 外还有油门调节环、直 升机配平调整片开关及 其他手柄( 如下图所示) 。
直升机操纵原理
➢ 不同于固定翼飞机,直升机没有在飞行中 可供操纵的专用活动舵面。
➢ 直升机的运动主要靠调节旋翼倾斜角和改 变尾桨浆距来实现,不同的倾斜角带来不 同的竖直和水平分力,不同的浆距产生不 同的推拉力,从而形成不同的运动效果。
➢ 旋翼倾斜角是靠直升机驾驶舱内的驾驶杆 来控制的,尾桨由驾驶舱内的脚蹬控制。
直升机操纵原理
驾驶杆偏离中立位置 ➢ 向前——直升机低头并向前运动; ➢ 向后——直升机抬头并向后退; ➢ 向左——直升机向左倾斜并向左侧运动; ➢ 向右——直升机向右倾斜并向右侧运动。
脚蹬位于座椅前下部,对于单旋翼带尾桨的直升机 来说,驾驶员蹬脚蹬操纵尾桨变距改变尾桨推(拉) 力,对直升机实施航向操纵。
The End
直升机空气动力特点
旋翼的运动比固定翼飞机机翼的运动复杂, 因为旋翼的桨叶除了随直升机一同作直线或 曲线动外,还要绕旋翼轴旋转,因此桨叶空 气动力现象要比机翼的复杂得多。
直升机空气动力特点
(1) 旋翼产生向上的升力。用来克服直升机的重力。 (2)旋翼同时产生向前的水平分力克服空气阻力使 直升机前进。 (3) 旋翼产生其他分力及力矩对直升机进行控制或 机动飞行。