直升机飞行原理(图解)
直升机桨叶工作原理动图
直升机桨叶⼯作原理动图越⼤型的直升机,动⼒系统驱动主旋翼所产⽣的扭矩通常也越⼤,需要更强的反扭矩系统才能加以平衡,但为了把涵道式尾桨“塞”到尺⼨有限的机尾垂直尾开孔结构内,涵道式尾桨的桨叶直径并不像传统尾桨那样容易放⼤,以便得到更⼤的侧向拉⼒〔或推⼒)。
与应⽤在同级直升机上的传统尾桨相⽐,涵道式尾桨的桨叶直径通常只有传统尾桨的40%~50%,但叶⽚数量更多〖传统尾桨多为2⼀5叶,涵道式尾桨则为8⼀13叶),转速也更⾼如果为了提供更⼤的侧向⼒量⽽进⼀步放⼤涵道式尾桨桨叶尺⼨,那么外覆整流罩的尺⼨也需随之放⼤,以致抵消其在减振、降噪与安全性⽅⾯原理如采⽤传统尾桨。
取代尾旋翼作为抵消主旋翼扭⽮巨的反扭⽮巨系统,实际作法是在尾梁根部安装I台由发动机驱动的可变螺距风扇,这台风扇可以超过5000rprn的转速、将从尾梁根部表⾯进⽓吸⼊的空⽓,加压后吹向尾梁后端,然后从尾梁后端⽯下侧的⼀或两条狭长排⽓缝隙排出,前着主旋翼下洗⽓流.同沿着尾梁表⾯流下,利⽤翼下洗⽓流⼀过司沿着尾梁表⾯流下,利⽤康达效应的附⾯作⽤,让沿着尾梁表⾯流动的⽓流发⽣偏转并加速,形成吹向机⾝左侧的环流控制⽓流,从⽽提供平衡主旋翼扭詎所需的侧向⼒量。
尾梁末端还没有⼀套喷流助推器,由可转动的外环与固定内环组成,内环左右两侧都开有排⽓槽,没有从尾梁排⽓缝隙流出的加压空⽓,可从这两个排⽓嘈中排出,形成助推喷流。
驾驶员可像操纵传统尾桨⼀样,利⽤脚蹬来转动喷流助睢器外环,利⽤外环遮盖在内环排⽓槽上的不同位置,控制从喷流助推閤排出的喷⽓流量:桨叶在环形过程中相对于其他桨叶有⼀定的挥舞外,材质也必须具有弹性,这就是为什么直升机停在地⾯时,桨叶总是“耷拉”着的原因。
但机械铰链磨损⼤,可靠性不好,德国 MBB⽤弹性元件取代了挥舞铰,研制成功⽆铰桨叶,第⼀个应⽤⽆铰桨叶的是 MBB Bo-105。
直升机飞行操控的基本原理
直升机飞行操控的基本原理图 1 直升机飞行操纵系统- 概要图(a)(b)图2 直升机操纵原理示意图1.改变旋翼拉力的大小2.改变旋翼拉力的方向3.改变尾桨的拉力飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
1.右侧周期变距操纵杆3.左侧周期变距操纵杆2.可调摩擦装置4.橡胶波纹套5.俯仰止动件6.复合摇臂 7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件13.总距拉杆14.与复合摇臂相连接的拉杆15.伺服机构16.伺服机构(横滚+总距)17.伺服机构(俯仰+总距)18.可调拉杆图 3 直升机周期变距操纵系统(一)纵向操纵情况当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
飞机飞行的原理图解
飞机飞行的原理图解飞机是指具有一具或多具发动机的动力装置产生前进的推力或拉力,由机身的固定机翼产生升力,在大气层内飞行的重于空气的航空器。
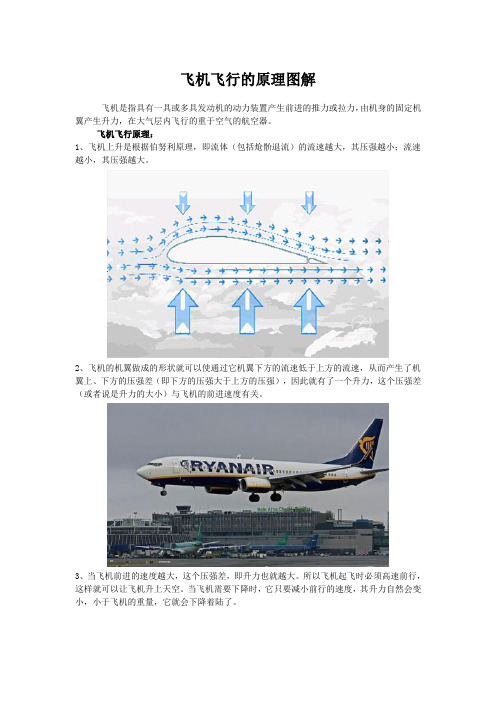
飞机飞行原理:1、飞机上升是根据伯努利原理,即流体(包括炝骱退流)的流速越大,其压强越小;流速越小,其压强越大。
2、飞机的机翼做成的形状就可以使通过它机翼下方的流速低于上方的流速,从而产生了机翼上、下方的压强差(即下方的压强大于上方的压强),因此就有了一个升力,这个压强差(或者说是升力的大小)与飞机的前进速度有关。
3、当飞机前进的速度越大,这个压强差,即升力也就越大。
所以飞机起飞时必须高速前行,这样就可以让飞机升上天空。
当飞机需要下降时,它只要减小前行的速度,其升力自然会变小,小于飞机的重量,它就会下降着陆了。
飞机的组成:大多数飞机都是由机翼、机身、尾翼、起落装置和动力装置五个主要部分组成。
机翼:主要功用是为飞机提供升力,以支持飞机在空中飞行,也起一定的稳定和操纵作用。
在机翼上一般安装有副翼和襟翼。
操纵副翼可使飞机滚,放下襟翼能使机翼升力系数增大。
另外,机翼上还可安装发动机、起落架和油箱等。
1.机身:主要功用是装载乘员、旅客、武器、货物和各种设备,还可将飞机的其它部件如尾翼、机翼及发动机等连接成一个整体。
2.尾翼:包括水平尾翼(平尾)和垂直尾翼(垂尾)。
水平尾翼由固定的水平安定面和可动的升降沧槌伞4怪蔽惨碓虬括固定的垂直安定面和可动的方向舵。
尾翼的主要功用是用来操纵飞机俯仰和偏转,以及保证飞机能平稳地飞行。
3.起落装置:飞机的起落架大都由减震支柱和机轮组成,作用是起飞、着陆滑跑,地面滑行和停放时支撑飞机。
4.动力装置:主要用来产生拉力和推力,使飞机前进。
其次还可为飞机上的其他用电设备提供电源等。
除了发动机本身,动力装置还包括一系列保证发动机正常工作的系统。
直升机飞行原理(图解)

飞行原理(图解)直升机能够垂直飞起来的基本道理简单,但飞行控制就不简单了。
旋翼可以产生升力,但谁来产生前进的推力呢?单独安装另外的推进发动机当然可以,但这样增加重量和总体复杂性,能不能使旋翼同时担当升力和推进作用呢?升力-推进问题解决后,还有转向、俯仰、滚转控制问题。
旋翼旋转产生升力的同时,对机身产生反扭力(初中物理:有作用力就一定有反作用力),所以直升机还有一个特有的反扭力控制问题.直升机主旋翼反扭力的示意图没有一定的反扭力措施,直升机就要打转转/ 尾桨是抵消反扭力的最常见的方法直升机抵消反扭力的方案有很多,最常规的是采用尾桨。
主旋翼顺时针转,对机身就产生逆时针方向的反扭力,尾桨就必须或推或拉,产生顺时针方向的推力,以抵消主旋翼的反扭力.抵消反扭力的主旋翼-尾桨布局,也称常规布局,因为这最常见/ 典型的贝尔407 的尾桨主旋翼当然也可以顺时针旋转,顺时针还是逆时针,两者之间没有优劣之分。
有意思的是,美、英、德、意、日直升机的主旋翼都是逆时针旋转,法、俄、中、印、波兰直升机都是顺时针旋转,英、德、意、日的直升机工业都是从美国引进许可证开始的,和美国采用相同的习惯可以理解,中、印、波兰是从前苏联和法国引进许可证开始的,和法、俄的习惯相同也可以理解,但美国和俄罗斯为什么从一开始选定不同的方向,法国为什么不和选美国一样的方向,而和俄罗斯一致,可能只是一个历史的玩笑。
各国直升机主旋翼旋转方向的比较尾桨给直升机的设计带来了很多麻烦。
尾桨要是太大了,会打到地上,所以尾桨尺寸受到限制,要提供足够的反扭力,就需要提高转速,这样,尾桨翼尖速度就大,尾桨的噪声就很大。
极端情况下,尾桨翼尖速度甚至可以超过音速,形成音爆.尾桨需要安装在尾撑上,尾撑越长,尾桨的力矩越大,反扭力效果越好,但尾撑的重量也越大。
为了把动力传递到尾桨,尾撑内需要安装一根长长的传动轴,这又增加了重量和机械复杂性.尾桨是直升机飞行安全的最大挑战,主旋翼失去动力,直升机还可以自旋着陆;但尾桨一旦失去动力,那直升机就要打转转,失去控制.在战斗中,直升机因为尾桨受损而坠毁的概率远远高于因为其他部位被击中的情况。
直升机飞行原理
直升机与旋翼机的飞行原理直升机的飞行原理1. 概况与普通飞机相比,直升机不仅在外形上,而且在飞行原理上都有所不同。
一般来讲它没有固定的机翼和尾翼,主要靠旋翼来产生气动力。
这里所说的气动力既包括使机体悬停和举升的升力,也包括使机体向前后左右各个方向运动的驱动力。
直升机旋翼的桨叶剖面由翼型构成,叶片平面形状细长,相当于一个大展弦比的梯形机翼,当它以一定迎角和速度相对于空气运动时,就产生了气动力。
桨叶片的数量随着直升机的起飞重量而有所不同。
重型直升机的起飞重量在20t以上,桨叶的数目通常为六片左右;而轻、小型直升机,起飞重量在以下,一般只有两片桨叶。
直升机飞行的特点是:(1) 它能垂直起降,对起降场地要求较低;(2) 能够在空中悬停。
即使直升机的发动机空中停车时,驾驶员可通过操纵旋翼使其自转,仍可产生一定升力,减缓下降趋势;(3) 可以沿任意方向飞行,但飞行速度较低,航程相对来说也较短。
2. 直升机旋翼的工作原理直升机旋翼绕旋翼转轴旋转时,每个叶片的工作类同于一个机翼。
旋翼的截面形状是一个翼型,如图所示。
翼型弦线与垂直于桨毂旋转轴平面(称为桨毂旋转平面)之间的夹角称为桨叶的安装角,以表示,有时简称安装角或桨距。
各片桨叶的桨距的平均值称为旋翼的总距。
驾驶员通过直升机的操纵系统可以改变旋翼的总距和各片桨叶的桨距,根据不同的飞行状态,总距的变化范围约为2º~14º。
气流V 与翼弦之间的夹角即为该剖面的迎角。
显然,沿半径方向每段叶片上产生的空气动力在桨轴方向上的分量将提供悬停时需要的升力;在旋转平面上的分量产生的阻力将由发动机所提供的功率来克服。
旋翼旋转时将产生一个反作用力矩,使直升机机身向旋翼旋转的反方向旋转。
前面提到过,为了克服飞行力矩,产生了多种不同的结构形式,如单桨式、共轴式、横列式、纵列式、多桨式等。
对于最常见的单桨式,需要靠尾桨旋转产生的拉力来平衡反作用力矩,维持机头的方向。
使用脚蹬来调节尾桨的桨距,使尾桨拉力变大或变小,从而改变平衡力矩的大小,实现直升机机头转向(转弯)操纵。
直升机飞行原理及平衡课件
……
• 图中的实线④为上述三项之和,即总的平飞需 用功率P平需随平飞速度的变化而变化。 它是一 条马鞍形的曲线:小速度平飞时,废阻功率很小, 但这时诱导功率很大,所以总的乎 飞需用功率仍 然很大。但比悬停时要小些。在一定速度范围内, 随着平飞速度的增加,由于 诱导功率急剧下降, 而废阻功率的增量不大,因此总的平飞需用功率 随乎飞速度的增加呈下 降趋势,但这种下降趋势 随 V的增加逐渐减缓。速度继续增加则由于废阻 功率随平飞速度 增加急剧增加。平飞需用功率随 V的增加在达到平飞需用功率的最低点后增加;总 的平飞 需用功率随 V的变化则呈上升趋势,而且 变得愈来愈明显
的飞行 纸飞机飞行中的 水桶中的回旋力 直升机中的回旋力
直升机平衡
平飞时的平衡 平飞时力的平衡 平飞需用其随速度的变化功率
及 平飞需用功率及其随速度的变
化 平飞需用功率随速度的变化 直升机的后飞 直升机的侧飞 直升机的转动惯量
• X轴:T2=X身
• Y轴: T1=G
• Z轴:T3约等于T尾
•
其中 Tl, T2, T3分别为旋翼拉力在 X, Y,Z
三个方向的分量。 对于单旋翼带尾桨直升机,由
于尾桨轴线通常不在旋翼的旋转平面内,为保持 侧向力矩 平衡,直升机稍带坡度角 r,故尾桨推 力与水平面之间的夹角为 y,T尾与T3方向不完全 一致,因为 y角很小,即cosr约等于1,故Z向力采 用近似等号。
平飞时的平衡...
• 相对于速度轴系平飞时, 作用在直升机上的力主要 有旋空拉力T,全机重力 G, 机体的废阻力 X身及尾桨 推力T尾。前飞时速度轴系 选取的原则是: X铀指向 飞行速度V方向; Y轴垂直 于X轴向上为正,2轴按右 手法则确定。保持直升机 等速直线平飞的力的平衡 条件
直升机飞行操控的基本原理
直升机飞行操控的基本原理图 1 直升机飞行操纵系统- 概要图(a)(b)图2 直升机操纵原理示意图1.改变旋翼拉力的大小2.改变旋翼拉力的方向3.改变尾桨的拉力飞行操纵系统包括周期变距操纵系统、总距操纵系统和航向操纵系统。
如图2所示,周期变距操纵系统控制直升机的姿态(横滚和俯仰),总距操纵系统控制直升机的高度,航向操纵系统控制直升机的航向。
一、周期变距操纵系统周期操纵系统用于操纵旋翼桨叶的桨距周期改变。
当桨距周期改变时,引起桨叶拉力周期改变,而桨叶拉力的周期改变,又引起桨叶周期挥舞,最终使旋翼锥体相对于机身向着驾驶杆运动的方向倾斜,从而实现直升机的纵向(包括俯仰)及横向(包括横滚)运动。
纵向和横向操纵虽然都通过驾驶杆进行操纵,但二者是各自独立的。
周期变距操纵系统(见图3)包括右侧和左侧周期变距操纵杆(1)和(3)、可调摩擦装置(2)、橡胶波纹套(4)、俯仰止动件(5)、横滚连杆(7)、俯仰连杆(8)、横滚止动件及中立位置定位孔(9)、横滚拉杆(10)、横滚协调拉杆(11)、俯仰扭矩管轴组件(12)、总距拉杆(13)、与复合摇臂相连接的拉杆(14)、伺服机构(15)、伺服机构(横滚+总距)(16)、伺服机构(俯仰+总距)(17)和可调拉杆(18)等组件。
1.右侧周期变距操纵杆3.左侧周期变距操纵杆2.可调摩擦装置4.橡胶波纹套5.俯仰止动件6.复合摇臂 7.横滚连杆8.俯仰连杆9.横滚止动件及中立位置定位孔10.横滚拉杆11.横滚协调拉杆12.俯仰扭矩管轴组件13.总距拉杆14.与复合摇臂相连接的拉杆15.伺服机构16.伺服机构(横滚+总距)17.伺服机构(俯仰+总距)18.可调拉杆图 3 直升机周期变距操纵系统(一)纵向操纵情况当前推驾驶杆时,通过俯仰扭矩管轴组件(9)及俯仰连杆(8),使复合摇臂(6)上的纵向摇臂逆时针转动,通过其后的拉杆、摇臂,使左前侧纵向伺服机构下移,自动倾斜器固定盘向左前方倾斜,旋翼桨盘前倾,进而使直升机向前运动。
直升机飞行原理 2

双桨共轴
但是缺点也很明显。共轴双桨用套筒轴驱动 上下两副反转的旋翼,同样有串列双桨的上下旋 翼之间的间距问题,间距小了,上下旋翼有可能 打架;间距大了,不光阻力高,对驱动轴的刚度 要求也高,而大功率的套筒轴本来在机械上就难 度很大。套筒轴不光要传递功率,还要传递上面 旋翼的总距、周期距控制,在机械设计上有相当 的难度。例如俄罗斯卡 莫夫系列直升机在向左 上升转弯时必须小心, 否则上下 桨打架, 后果将是机毁人亡。
尾桨原理
前缘 b
Vq 桨毂旋转面 后缘 桨毂旋转轴线
Hale Waihona Puke 自动倾斜器构造驾驶杆操纵
与旋翼的自动倾斜器连接,带动整个旋翼倾斜 —— 直升机低头并向前运动; 向后 —— 抬头并向后退; 向左 —— 向左倾斜并向左侧运动; 向右 —— 向右倾斜并向右侧运动。
向前
双桨共轴
方便的维护无尾桨结构。由于上下旋翼反向旋转,形成了直升机水平 方向的力矩平衡,所以双桨共轴直升机不需要尾桨来平衡直升机水平 方向上的力矩。 气动特性对称,机动性好。在使用相同发动机的情况下,两副共轴式 旋翼的升力比单旋翼/尾桨布局的旋翼升力大12%。共轴式旋翼气动 力对称性显然优于单旋翼式,不存在各轴之间互相交连的影响,机动 飞行时易于操纵。改变航向时,共轴式直升机很容易保持直升机的飞 行高度,这在超低空飞行和飞越障碍物时尤其可贵,对飞行安全有重 要意义。
升力来源
直升机飞行原理和结构与飞机
不同飞机靠它的固定机翼产生 升力,而直升机是靠它头上的 桨叶(螺旋桨)旋转产生升力。 直升机的桨叶大概有2—3米长, 一般有5叶组成。普通飞机是靠 翅膀产生升力起飞的,而直升 飞机是靠螺旋桨转动,拨动空 气产生升力的。直升飞机起飞 时,螺旋桨越转越快,产生的 升力也越来越大,当升力比飞 机的重量还大时,飞机就起飞 了。在飞行中飞行员调节高度 时,就只要通过改变大螺旋桨 旋转的速度就可以了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
飞行原理(图解)
直升机能够垂直飞起来的基本道理简单,但飞行控制就不简单了。
旋翼可以产生升力,但谁来产生前进的推力呢?单独安装另外的推进发动机当然可以,但这样增加重量和总体复杂性,能不能使旋翼同时担当升力和推进作用呢?升力-推进问题解决后,还有转向、俯仰、滚转控制问题。
旋翼旋转产生升力的同时,对机身产生反扭力(初中物理:有作用力就一定有反作用力),所以直升机还有一个特有的反扭力控制问题。
直升机主旋翼反扭力的示意图
没有一定的反扭力措施,直升机就要打转转/ 尾桨是抵消反扭力的最常见的方法
直升机抵消反扭力的方案有很多,最常规的是采用尾桨。
主旋翼顺时针转,对机身就产生逆
时针方向的反扭力,尾桨就必须或推或拉,产生顺时针方向的推力,以抵消主旋翼的反扭力。
抵消反扭力的主旋翼-尾桨布局,也称常规布局,因为这最常见/ 典型的贝尔407 的尾桨主旋翼当然也可以顺时针旋转,顺时针还是逆时针,两者之间没有优劣之分。
有意思的是,美、英、德、意、日直升机的主旋翼都是逆时针旋转,法、俄、中、印、波兰直升机都是顺时针旋转,英、德、意、日的直升机工业都是从美国引进许可证开始的,和美国采用相同的习惯可以理解,中、印、波兰是从前苏联和法国引进许可证开始的,和法、俄的习惯相同也可以理解,但美国和俄罗斯为什么从一开始选定不同的方向,法国为什么不和选美国一样的方向,而和俄罗斯一致,可能只是一个历史的玩笑。
各国直升机主旋翼旋转方向的比较尾桨给直升机的设计带来了很多麻烦。
尾桨要是太大了,会打到地上,所以尾桨尺寸受到限制,要提供足够的反扭力,就需要提高转速,这样,尾桨翼尖速度就大,尾桨的噪声就很大。
极端情况下,尾桨翼尖速度甚至可以超过音速,形成音爆。
尾桨需要安装在尾撑上,尾撑越长,尾桨的力矩越大,反扭力效果越好,但尾撑的重量也越大。
为了把动力传递到尾桨,尾撑内需要安装一根长长的传动轴,这又增加了重量和机械复杂性。
尾桨是直升机飞行安全的最大挑战,主旋翼失去动力,直升机还可以自旋着陆;但尾桨一旦失去动力,那直升机就要打转转,失去控制。
在战斗中,直升机因为尾桨受损而坠毁的概率远远高于因为其他部位被击中的情况。
即使不算战损情况,平时使用中,尾桨对地面人员的危险很大,一不小心,附近的人员和器材就会被打到。
在居民区或林间空地悬停或起落时,尾桨很容易挂上建筑物、电线、树枝、飞舞物品。
尾桨可以是推式,也可以是拉式,一般认为以推式的效率为高。
虽然不管推式还是拉式,气流总是要流经尾撑,但在尾桨加速气流前,低速气流流经尾撑的动能损失较小。
尾桨的旋转方向可以顺着主旋翼,也就是说,对于逆时针旋转的主旋翼,尾桨向前转(或者说,从右
面向直升机看,尾桨顺时针旋转),这样尾桨对主旋翼的气动干扰小,主旋翼的升力可以充分发挥。
尾桨也可以逆着主旋翼的方向旋转,也就是说,对于逆时针旋转的主旋翼,尾桨向后转(或者说,从右面向直升机看,尾桨逆时针旋转),这样尾桨和主旋翼之间形成一个互相干扰,主旋翼的升力受到损失,但尾桨的作用加强,所以可以缩小尺寸,或降低功率。
两者没有绝对的优劣,设计得当时,一般选择顺着转,只有设计不当、尾桨控制作用不够时,
才选择逆着转,像米-24直升机那样。
涵道尾桨(fenestron)将尾桨缩小,“隐藏”在尾撑端部的巨大开孔里,相当于给尾桨安上一个罩子,这样大大改善了安全性,不易打到周围的物体。
由于涵道尾桨的周边是遮蔽的,尾桨翼尖附近的气流情况大大简化,翼尖速度较高也不至于大大增加噪声。
罩子的屏蔽也使前后方向上的噪声大大减小。
涵道尾桨的缺点是风扇的包围结构带来较大的重量,这个问题随涵道尾桨直径增加而急剧恶化,所以涵道尾桨难以用到大型直升机上。
涵道尾桨只有法国直升机上采用,美国的下马了的Comanche 是法国之外少见的采用涵道尾桨的例子。
海豚直升机上的涵道尾桨/ 经典的采用涵道尾桨的EC-120 直升机,中国参加合作制造
已经下马的美国RAH-66“科曼奇”直升机同样采用涵道尾桨另一个取代尾桨的方案是NOTAR,NOTAR 是No Tail Rotor(意为无尾桨)的简称,用喷气引射和主旋翼下洗气流的有利交互作用形成反扭力。
主旋翼产生的下洗气流从尾撑两侧流经尾撑,发动机产生的压缩空气通过尾撑一侧的向下开槽喷出,促使这一侧的下洗气流向尾撑表面吸附并加速(即所谓射流效应或Coanda 效应),形成尾撑两侧气流的速度差,产生向一侧的侧推力,实现没有尾桨的反扭力。
尾撑顶端的直接喷气控制提供更精细的方向控制,但不提供主要的反扭力,不是不可以,而是用射流效应可以用较少的喷气就实现较大的反扭力。
从这个原理
推而广之,如果把尾撑的截面做成机翼一样,下洗气流本身就可产生侧推力,甚至可以在下侧安装类似襟翼的装置以控制侧推力,岂不更好?不知道为什么,没有人这样做。
NOTAR 的噪音比涵道风扇更低,安全性更好,在演示中,只要主旋翼不打到树枝,直接把尾撑捅到树丛里也照样安全飞行,但NOTAR 同样没有用到大型直升机上的例子。
NOTAR 只有麦道(现
波音)直升机上使用,可能是专利的缘故。
NOTAR 的原理简图
采用NOTAR 的MD600N直升机,不知道为什么,MD 直升机还是叫MD,不叫波音。