电机转动惯量计算模型
伺服扭矩惯量计算

电机转矩T (N.m) 小轮1质量M1(kg) 小轮1半径r1(m) 小轮2质量M2(kg) 小轮2半径r2(m) 重物质量M3(kg) 减速比r1/r2=1/R
JL=1/2*M1*r12 + (1/2*M2*r22)/R2 + M3*r12
JL=1/2*M1*r12 + 1/2*M2*r12 + M3*r12
扭矩计算
电机转矩T (N.m) 滑轮半径r (m)
T r
F
T 提升力F (N) ——力F= —— · R r
T
1/R
F
1
扭矩计算
F
电机转矩T (N.m) 螺杆导程PB (m)
T
推力F (N)
2π F=T ·—— PB
PB
F
2π 经过减速机后的推力F=T ·—— · R PB
注意: 这种传动方式计算惯量公式只与r1有关
5
3
惯量计算
二、负载直线运动时惯量计算 JL(㎏ • ㎡)
(以电机轴心为基准计算转动惯量)
M
直线运动部分 PB JK=M ×( )² 2π 经过减速机之后的转动惯量 JL= JK R²
1/R PB
4
惯量计算
三、皮带类传动时惯量计算 JL(㎏ • ㎡)
(以电机轴心为基准计算转动惯量)
M1 r1 M3 r2 M2
T
1/R
PB
2
惯量计算
一、负载旋转时惯量计算 JL(㎏ • ㎡)
(以电机轴心为基准计算转动惯量)
1/R L(m) 实心圆柱 D(m)
JK= 1 ×MK ×D² 8
L(m) D1 D0 (m) (m) 空心圆柱
JK= 1 ×MK ×(D02- D12) 8 经过减速机之后的转动惯量 JL= JK R²
转动惯量扭矩计算

用物体转动惯量的计算惯量的计算:
矩形体的计算
图1 矩形结构定义
以a-a为轴运动的惯量:
公式中:
以b-b为轴运动的惯量:
圆柱体的惯量
图2 圆柱体定义角加速度的公式α=(2π/60)/t 转矩T=J*α=J*n*2π/60)/t
α-弧度/秒t-秒T –Nm n-r/min
空心柱体惯量
图3 空心柱体定义
摆臂的惯量
图4-1 摆臂1结构定义
图4-2 摆臂2结构定义
曲柄连杆的惯量
图5 曲柄连杆结构定义
带减速机结构的惯量
图6 带减速机结构定义
齿形带传动的惯量
图7 齿形带传动结构
齿轮组减速结构的惯量
图8 齿轮组传动结构
滚珠丝杠的惯量
图9 丝杠传动结构折算到电机的力矩
传送带的惯量
图10 传送带结构总惯量
折算到电机的惯量
折算到电机的扭矩
齿轮,齿条传动惯量的计算
图11 齿轮齿条结构定义
1,确认您的负载额定扭矩要小于减速机额定输出扭矩,2,伺服电机额定扭矩*减速比要大于负载额定扭矩。
3,负载通过减速机转化到伺服电机的转动惯量,要在伺服电机允许的围。
4,确认减速机精度能够满足您的控制要求。
5,减速机结构形式,外型尺寸既能满足设备要求,同时能与所选用的伺服电机很好,转动惯量一定要算的,不算是因为你已经确认了不会有问题,否则负载拖电机是一定的。
如果对启动的时间有要求,如初速度为0需要几秒后达到速度为何,就需要计算转动惯量,角的加速度和转动惯量求转矩。
电机转动惯量计算模型

电机转动惯量计算模型电机转动惯量是指电机在转动过程中克服转动惯性的能力大小,是电机转动惯性的度量。
它是电机工程中一个重要的参数,对电机的转速、起动、制动等性能有着重要的影响。
为了能够准确地计算电机的转动惯量,可以建立一个计算模型。
首先,我们需要了解电机的构造,电机主要由转子和定子组成。
转子是电机的运动部分,定子是电机的静止部分。
转子负责转动,而定子提供磁场。
电机的转动惯量主要由转子的结构和质量决定。
对于不同类型的电机,转动惯量的计算方法有所不同。
下面以直流电机为例进行分析。
直流电机转动惯量的计算模型可以分为两个部分:转子转动惯量和绕组转动惯量。
1.转子转动惯量的计算:转子转动惯量主要与转子的质量和形状有关。
我们可以将转子分割成若干个小块,然后对这些小块进行分别计算,最后将它们加总得到整个转子的转动惯量。
转子的转动惯量可以用以下公式计算:I_r=∑(m_i*r_i^2)其中,I_r为转子的转动惯量,m_i为各小块的质量,r_i为各小块到旋转轴的距离。
2.绕组转动惯量的计算:绕组转动惯量与绕组自身的结构和质量有关。
绕组一般由导线和绝缘材料组成,我们可以将绕组分割成若干个小块,然后对这些小块进行分别计算,最后将它们加总得到整个绕组的转动惯量。
绕组的转动惯量可以用以下公式计算:I_w=∑(m_i*r_i^2)其中,I_w为绕组的转动惯量,m_i为各小块的质量,r_i为各小块到旋转轴的距离。
绕组的质量可以通过绕组的几何参数和材料密度计算得到,而绕组各小块到旋转轴的距离可以通过几何关系得到。
最后,将转子的转动惯量和绕组的转动惯量加总,即可得到整个电机的转动惯量。
需要注意的是,以上的计算模型假设电机的各部分密度均匀且转动轴为转子的几何中心。
对于其他类型的电机,如异步电机和同步电机,转动惯量的计算方法也有所差异。
综上所述,电机转动惯量的计算模型包括转子转动惯量和绕组转动惯量的计算。
通过对电机的结构和质量进行分析和计算,可以准确地得到电机的转动惯量,为电机的设计和性能优化提供参考依据。
常用机构的转动惯量与扭矩的计算

常用机构的转动惯量与扭矩的计算
图3 空心柱体定义
摆臂的惯量
图4-1 摆臂1结构定义
图4-2 摆臂2结构定义
曲柄连杆的惯量
图5 曲柄连杆结构定义带减速机结构的惯量
图6 带减速机结构定义齿形带传动的惯量
图7 齿形带传动结构齿轮组减速结构的惯量
图8 齿轮组传动结构滚珠丝杠的惯量
图9 丝杠传动结构
折算到电机的力矩
传送带的惯量
图10 传送带结构总惯量
折算到电机的惯量
折算到电机的扭矩
齿轮,齿条传动惯量的计算
图11 齿轮齿条结构定义
1,确认您的负载额定扭矩要小于减速机额定输出扭矩,2,伺服电机额定扭矩*减速比要大于负载额定扭矩。
3,负载通过减速机转化到伺服电机的转动惯量,要在伺服电机允许的范围内。
4,确认减速机精度能够满足您的控制要求。
5,减速机结构形式,外型尺寸既能满足设备要求,同时能与所选用的伺服电机很好,转动惯量一定要算的,不算是因为你已经确认了不会有问题,否则负载拖电机是一定的。
如果对启动的时间有要求,如初速度为0需要几秒后达到速度为何,就需要计算转动惯量,角的加速度和转动惯量求转矩。
转动惯量公式
nema标准中的计算是如下(转化公式):J=A×0.055613×(Pn^0.95)÷(n/1000)^2.4-0.004474×(Pn^1.5)÷(n/1000)^1.8A小于等于1800rpm时取24,A大于1800rpm时取27 Pn为功率(kw) n 为同步转速高压电动机在设计时,要求计算出转子的转动惯量。
下面对计算方法做一分析。
转动惯量是物体在转动时惯性的度量,它不仅与物体质量的大小有关,还与物体质量分体情况有关。
机械工程师手册给出了一些简单形状物体的转动惯量。
1、圆柱体沿轴线转动惯量:Kg•m2 (1)式中:M —圆柱体质量KgR —圆柱体外径半径 m2、空心圆柱体沿轴线转动惯量:Kg•m2 (2)式中: M —空心圆柱体质量KgR —空心圆柱体外半径 mr —空心圆柱体内半径m3、薄板沿对称线转动惯量:Kg•m2 (3)式中:M —薄板质量Kga —薄板垂直于轴线方向的宽度m物体的转动惯量除了用J表示外,在工程上有的用物体的重量G和物体的回转直径D的平方的乘积GD2来表示,也称为物体的飞轮力矩或惯量矩,单位N•m2或Kg f m2。
物体的飞轮力矩GD2和转动惯量J之间的关系,用下式表示:N•m2 (4)式中:g —重力加速度 g=9.81 m/s2将重力单位N化为习惯上的重力单位Kgf ,则(4)变为:Kg f m2 (5)由以上公式,可以对鼠笼型高压电机的转动惯量进行计算。
计算时,将高压电机转子分解为转子铁心(包括导条和端环)、幅铁、转轴三部分,分别算出各部分的Jn,各部分的转动惯量相加即得电机的转动惯量J。
如需要,按(5)式换算成飞轮力矩GD2。
一般产品样本中要求给定的是转动惯量J,兰州引进的电磁设计程序计算出的是飞轮力矩GD2。
计算程序如下:1、转子铁心的转动惯量,按空心圆柱公式(2)进行计算,考虑导条端环度大小的因素,以系数c进行修正。
电机转动惯量的计算
电机转动惯量的计算电机转动惯量是指电机在旋转过程中抵抗改变角速度的能力,通常用转动惯量(J)来表示。
具体来说,转动惯量是指一个物体在旋转轴上的转动质量特性,可以通过计算来得到。
在电机中,转动惯量的计算是非常重要的,它常常用来预测转矩与加速度之间的关系,以及转速与输出功率之间的关系,因此对于电机的设计和控制都至关重要。
计算电机转动惯量的方法有多种,下面将介绍几种常见的计算方法。
1.刚体模型计算法刚体模型计算法是基于刚体理论的一种计算方法,其基本思想是将电机模型化为一个刚体,利用刚体转动惯量的计算公式进行计算。
对于简单的电机结构,如均匀圆柱形电机,可以直接使用公式进行计算。
对于圆柱形电机来说,其转动惯量公式为:J=(1/2)*m*r^2其中,J为转动惯量,m为电机的质量,r为电机的半径。
对于一些复杂结构的电机,可以将其分解为若干个简单的部分,然后分别计算每个部分的转动惯量,再将其相加得到整体的转动惯量。
2.数值计算法数值计算法是一种利用数值方法进行转动惯量计算的方法,它将电机模型离散化,然后通过数值积分的方法来计算转动惯量。
最常用的数值计算方法是有限元法(FEM)和有限差分法(FDM)。
有限元法是一种基于划分离散单元的数值计算方法,它将电机模型划分为若干个小单元,然后对每个小单元进行转动惯量的计算,最后将各个小单元的转动惯量进行求和得到整体的转动惯量。
有限差分法是一种基于差分逼近的数值计算方法,它将电机模型进行网格化,然后通过差分逼近的方法来计算转动惯量。
具体而言,有限差分法利用差分逼近的思想,将微分方程离散化为代数方程组,然后通过求解代数方程组来计算转动惯量。
数值计算法的优点是可以处理复杂的电机结构,并且具有较高的计算精度,但是计算过程相对复杂,需要使用专门的计算软件进行计算。
3.经验值法经验值法是一种通过电机的实际运行数据来估计转动惯量的方法,它基于大量的实验数据和经验公式,通过与实际测量数据进行对比来估计转动惯量。
常用机构的转动惯量与扭矩 的计算
附录 1. 常用物体转动惯量的计算惯量的计算:
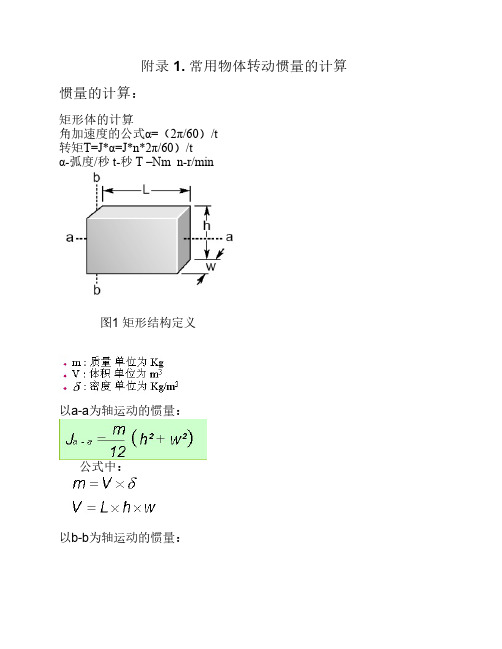
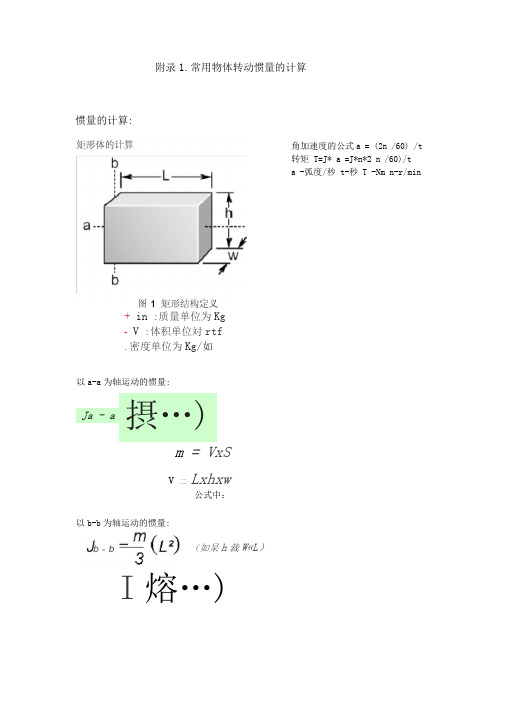
矩形体的计算
角加速度的公式α=(2π/60)/t
转矩T=J*α=J*n*2π/60)/t
α-弧度/秒 t-秒 T –Nm n-r/min
图1 矩形结构定义
以a-a为轴运动的惯量:
公式中:
以b-b为轴运动的惯量:
圆柱体的惯量
图2 圆柱体定义
空心柱体惯量
图3 空心柱体定义
摆臂的惯量
图4-1 摆臂1结构定义
图4-2 摆臂2结构定义
曲柄连杆的惯量
图5 曲柄连杆结构定义带减速机结构的惯量
图6 带减速机结构定义齿形带传动的惯量
图7 齿形带传动结构齿轮组减速结构的惯量
图8 齿轮组传动结构滚珠丝杠的惯量
图9 丝杠传动结构
折算到电机的力矩
传送带的惯量
图10 传送带结构总惯量
折算到电机的惯量
折算到电机的扭矩
齿轮,齿条传动惯量的计算
图11 齿轮齿条结构定义
1,确认您的负载额定扭矩要小于减速机额定输出扭矩, 2,伺服电机额定扭矩*减速比要大于负载额定扭矩。
3,负载通过减速机转化到伺服电机的转动惯量,要在伺服电机允许的范围内。
4,确认减速机精度能够满足您的控制要求。
5,减速机结构形式,外型尺寸既能满足设备要求,同时能与所选用的伺服电机很好,转动惯量一定要算的,不算是因为你已经确认了不会有问题,否则负载拖电机是一定的。
如果对启动的时间有要求,如初速度为0需要几秒后达到速度为何,就需要计算转动惯量,角的加速度和转动惯量求转矩。
常用机构的转动惯量与扭矩的计算
附录1.常用物体转动惯量的计算角加速度的公式a = (2n /60) /t 转矩 T=J* a =J*n*2 n /60)/t a -弧度/秒 t-秒 T -Nm n-r/min+ in :质量单位为Kg + V :体积单位対rtf .密度单位为Kg/如以a-a 为轴运动的惯量:m = VxSV 二 Lxhxw公式中:以b-b 为轴运动的惯量:I 熔…)惯量的计算:Ja - a摂…)(如杲h 裁W«L)圆柱体的惯量m = Vx3Di ~2 J 中严虽兰2 8空心柱体惯量TTD12"T"xL图2圆柱体定义图3空心柱体定义V^2-D'K L4图4-1摆臂1结构定义J = m.R3J = m R2 + mi ri2图5曲柄连杆结构定义J N :电或1S 量 J L :负载惯量J LOH :负载惯量折茸到电机侧前慣量 M L :负载转矩J R :减速机折算到输入的15量R :减速比H K :喩速机效率R=6JW = X Bf = ff X 0)L&L 3L■根爵能量守恒定律:图6带减速机结构定义Jx 丁二 J M + J R Z ,■总惆J M :电机愦童Ji :负戦惯量 M:负载力矩Jp M :电机側苻轮噴量 □PM :丐机恻帝轮直径M TM :电机侧带轮肯数J PI :负敎侧带轮惯量D PL ;负载带轮直JpLs Dp|_.6/w = R <&L 3M = Rx C JI )LA/TX Dpi./V™ D PM■ SfMSiJ 电机绘N TIL;煲载带轮齿数q:减谨机效率:皮带原量mB图7齿形带传动结构Ju :电机惯量J L:负载惯量M L :负载理矩J GM:电机侧齿轮憤量N TM :电机侧齿轮齿数J GL :负载齿轮惯量N IL:负载齿输齿数n:诚速机效率R- - 9'w - R^6L O>J0=R^O)L/Vw■总惯量:■折算到电机惯量:■折算到电机力矩:图8齿轮组传动结构J M:电机惯量Jc :连接轴惯量M L :负载质量X L:负载位置VL:负载速度mi:滑台质量FP:做功力Fg :重力Ffr:摩擦力Js :丝杠惯量p :丝杠嫌距(mm/rev)c:丝杠角廈n:丝杠效率P:摩擦系数g:重力加遽度■总惯量I折算到电机的力矩Jrr2CC门X5/”-AIr*B”sPJ>*I--.^fj--JJILT1mffJJ十4■I「-一--图9丝杠传动结构N TPI, PC PI =T?D I =Nrp^pA X L V LC7M 二------- 3皿—--------C PI Q P/J M:电机惯量m L :负载质量X L;负载位置V L:负载速度m B:传送带质量FP:作用力Fg :重力Ffr :摩擦力Jp x :瞬惯量6:辗轴直径N TPI:主眾齿数p :传送带导程(mm/tooth)C PI:主報闾也Q:倾角n:传送带效率p:摩擦系数g :引力系数图io传送带结构折算到电机的惯量F严血+ 加 >*fr —■ I irj t i /ijs IX g X Li X COo£3f MrJ G , N TG 5 P G C G - TT D G - N TG P G 9M =X L cZ V LGU M=——C GJ M :电机惯量 m L :负载质量 X L :负载位置 V L :负载速度F P :作用力F g :重力Ffr :摩擦力J G :齿轮惯量 D G :齿轮直径N TG :齿轮齿数P G :齿轮尊程(mm/tooth) C G :齿轮周长 a :轴运动角度 q:齿轮传动效率 M:摩擦系数 g:引力参数J w 二X 十人十J …图11齿轮齿条结构定义 总惯量:■折算到电机的悄量:■折算到电机的力矩:仁 U C \pLM IL卫 + 厂^ + i/r jLJGLJ1'-j]E = (m + mjxgxs 旧&■十m^jxgy/Jxcosa1,确认您的负载额定扭矩要小于减速机额定输出扭矩,2,伺服电机额定扭矩*减速比要大于负载额定扭矩。