示意图(单双脉冲)
双脉冲电源说明书
SMD 型数控双脉冲电镀电源使用说明书邯郸市大舜电镀设备有限公司使用本机前请详细阅读此说明书一、概述:脉冲电镀所依据的电化学原理是:当电流导通时,电化学极化增大,阴极区附近金属离子充分被沉积,镀层结晶细致、光亮;当电流关断时,阴极区附近放电离子又恢复到初始浓度,浓差极化消除。
SMD双脉冲电镀电源,即周期换向脉冲电镀电源(这里的“双”的含义指“双向”),它是在输出一组正向脉冲电流之后引入一组反向脉冲电流,正向脉冲持续时间长反向脉冲持续时间短,大幅度、短时间的反向脉冲所引起的高度不均匀阳极电流分布会使镀层凸处被强烈溶解而整平。
与单脉冲电镀相比,双脉冲的突出优点表现在:1、反向脉冲电流明显改善了镀层的厚度分布而使镀层厚度均匀,并因溶解了阴极镀层上的毛刺而整平2、反向脉冲电流的阳极溶解使阴极表面金属离子浓度迅速回升,这有利于随后的阴极周期使用高的脉冲电流密度,而高的脉冲电流密度又使得晶核的形成速度大于晶体的生长速度,因而可以得到更加致密、光亮、孔隙率低的镀层3、反向脉冲电流的阳极剥离作用使镀层中有机杂质(含光亮剂)的夹附大大减少,因而镀层纯度高,抗变色能力强,这一点在氰化镀银中尤为突出4、反向脉冲电流使镀层中夹杂的氢发生氧化,从而可消除氢脆(如电沉积钯时反向脉冲可除去共沉积的氢)或减小内应力5、周期性的反向脉冲电流使镀件表面一直处于活化状态,因而可得到结合力好的镀层6、反向脉冲有利于减薄扩散层的实际厚度,提高阴极电流效率,因而合适的脉冲参数会使镀层沉积速度进一步加快7、在不允许或少量允许有添加剂的电镀体系中,双脉冲电镀可得到细致、平整、光洁度好的镀层所以,镀层的耐温、耐磨、焊接、韧性、防腐、导电率、抗变色、光洁度等性能指标成倍提高,并可大幅度节约稀贵金属(约20-50%),节约添加剂(如光亮氰化镀银约50-80%)。
二、用途可用于镀金、银、稀有金属、镍、铜、锌、锡、铬及合金等;铜、镍等的电铸;电解电容的敷能;铝、钛等制品的阳极氧化;精密零件的电解抛光;蓄电池的充电等。
步进电机驱动器控制信号接口说明
...步进电机驱动器控制信号接口说明驱动器是把计算机控制系统提供的弱电信号放大为步进电机能够接受的强电流信号,控制系统提供给驱动器的信号主要有以下三路: 1.步进脉冲信号CP:这是最重要的一路信号,因为步进电机驱动器的原理就是要把控制系统发出的脉冲信号转化为步进电机的角位移,或者说:驱动器每接受一个脉冲信号CP,就驱动步进电机旋转一步距角, CP的频率和步进电机的转速成正比, CP的脉冲个数决定了步进电机旋转的角度。
这样,控制系统通过脉冲信号CP就可以达到电机调速和定位的目的。
2.方向电平信号DIR:此信号决定电机的旋转方向。
比如说,此信号为高电平时电机为顺时针旋转,此信号为低电平时电机则为反方向逆时针旋转。
此种换向方式,我们称之为单脉冲方式。
另外,还有一种双脉冲换向方式:驱动器接受两路脉冲信号(标注为CW和CCW),当其中一路(如CW)有脉冲信号时,电机正向运行,当另一路(如CCW)有脉冲信号时,电机反向运行。
用户使用何种方式,由拨位开关设定。
3.使能信号EN:此信号在不连接时默认为有效状态,这时驱动器正常工作。
当此信号回路导通时,驱动器停止工作,这时电机处于无力矩状态(等同于本公司SH系列驱动器的FREE信号),此信号为选用信号。
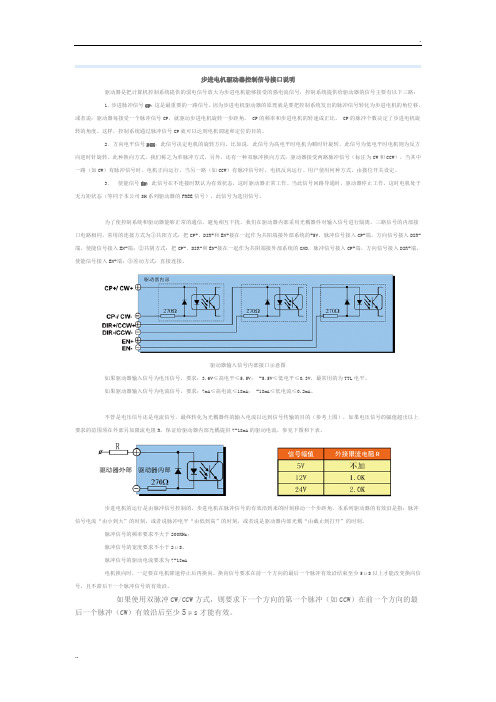
为了使控制系统和驱动器能够正常的通信,避免相互干扰,我们在驱动器内部采用光耦器件对输入信号进行隔离,三路信号的内部接口电路相同,常用的连接方式为①共阳方式:把CP+、DIR+和EN+接在一起作为共阳端接外部系统的+5V,脉冲信号接入CP-端,方向信号接入DIR-端,使能信号接入EN-端;②共阴方式:把CP-、DIR-和EN-接在一起作为共阴端接外部系统的GND,脉冲信号接入CP+端,方向信号接入DIR+端,使能信号接入EN+端;③差动方式:直接连接。
驱动器输入信号内部接口示意图如果驱动器输入信号为电压信号,要求:3.6V≤高电平≤5.5V; -5.5V≤低电平≤0.3V,最常用的为TTL电平。
vvt-i

(1)凌志LS400汽车可变配气正时控制机构(VVT-i) VVT-i系统用于控制进气门凸轮轴在50°范围内调整凸轮轴转角,使配气正时满足优化控制发动机工作状态的要求,从而提高发动机在所有转速范围内的动力性、经济性和降低尾气的排放。 VVT-i系统由VVT-i控制器、凸轮轴正时机油控制阀和传感器三部分组成,如下图所示。其中传感器有曲轴位置传感器、凸轮轴位置传感器和VVT传感器。 LS400汽车的发动机是8缸V型排列4气门式的,有两根进气凸轮轴和两根排气凸轮轴。在工作过程中,排气凸轮轴由凸轮轴齿形带轮驱动,其相对于齿形带轮的转角不变。曲轴位置传感器测量曲轴转角,向ECU提供发动机转速信号;凸轮轴位置传感器测量齿形带轮转角;VVT传感器测量进气凸轮轴相对于齿形带轮的转角。它们的信号输入ECU,ECU根据转速和负荷的要求控制进气凸轮轴正时控制阀,控制器根据指令使进气凸轮轴相对于齿形带旋转一个角度,达到进气门延迟开闭的目的,用以增大高速时的进气迟后角,从而提高充气效率。 1)结构 VVT-i控制器的结构如下图所示,它包括由正时带驱动的外齿轮和与进气凸轮轴刚性连接的内齿轮,以及一个内齿轮、外齿轮之间的可动活塞。活塞的内、外表面上有螺旋形花键。活塞沿轴向的移动,会改变内、外齿轮的相对位置,从而产生配气相位的连续改变。 VVT外壳通过安装在其后部的剪式齿轮驱动排气门凸轮轴。 凸轮轴正时控制阀根据ECU的指令控制阀轴的位置,从而将油压施加给凸轮轴正时带轮以提前或推迟配气正时。发动机停机时,动机ECU的指令,当凸轮轴正时控制阀位于图(a)所示时,机油压力施加在活塞的左侧,使得活塞向右移动。由于活塞上的旋转花键的作用,进气凸轮轴相对于凸轮轴正时带轮提前某一角度。 当凸轮轴正时控制阀位于图(b)位置时,活塞向左移动,并向延迟的方向旋转。进而,凸轮轴正时控制阀关闭油道,保持活塞两侧的压力平衡,从而保持配气相位,由此得到理想的配气正时。 提高充气效率是提高发动机动力性能的重要措施。除了增压以外,合理选择配气相位且能随发动机转速不同而变化,以及利用进气的惯性及谐振效应是提高充气效率的重要途径。 进气惯性及谐振效应是随着发动机转速、进气管长度及管径大小的变化而变化。在不同转速下,进气管长度应有所不同,方能获得良好的进气惯性效应。并且,只有采用可变配气相位,可变进气系统才能适应不同发动机转速下的要求,才能较全面地提高发动机性能。 可变进气系及配气相位改善发动机的性能,主要体现在以下几方面: ①能兼顾高速及低速不同工况,提高发动机的动力性和经济性; ②降低发动机的排放; ③改善发动机怠速及低速时的性能及稳定性。 这里首先介绍可变进气系统,至于可变配气相位以后会以不同的方式再作介绍。 可变进气系统分为两类:(1)多气门分别投入工作;(2)可变进气道系统。其目的都是为了改变进气涡流强度、提高充气效率;或者为了形成谐振及进气脉冲惯性效应,以适应低速及中高速工况都能提高性能的需要。 1.多气门分别投入工作 实现多气门分别投入工作的结构方案有如下两种:第一,通过凸轮或摇臂控制气门按时开或关;第二,在气道中设置旋转阀门,按需要打开或关闭该气门的进气通道,其结构如图3-94a)所示,这种结构比用凸轮、摇臂控制简单。 a)涡轮控制阀示意图 b)低速、小负荷工况 c)高速、大负荷工况 图3-94 多气门分别投入工作示意图 当发动机在节气门部分开度工作时,涡流控制阀关闭(见图3-94b),混合气通过主要螺旋进气道进入气缸。节流的气道促进混合加速,并沿着切线方向进入气缸,这样可以形成较强的进气涡流,对于低速工况及燃烧稀混合气是有利的。 当发动机转速及负荷增加时,仅由主气道进入气缸的混合气不能满足发动机的需要,于是副进气道中的阀门开启,增加进入缸内的混合气(见图3-94c),而且抑制了进气道中进气涡流强度,这对于提高发动机高速工况时的容积效率及燃烧效率、减少能量损失是有利的。 2.可变进气道系统 可变进气道系统是根据发动机不同转速,使用不同长度及容积的进气管向气缸内充气,以便能形成惯性充气效应及谐振脉冲波效应,从而提高充气效率及发动机动力性能。 (1)双脉冲进气系统 双脉冲进气系统由空气室及两根脉冲进气管组成,如图3-95所示。空气室的入口处设置节气门,并与两根直径较大的进气管相连接,其目的在于防止两组(每组三缸)进气管中谐振空气柱的互相干扰。每根脉冲管子成为形成谐振空气波的通道,分别连接两组气缸。 将六缸机的进气道分成前后两组,这就相当于两个三缸机的进气管,每个气缸有240°的进气冲程,各气缸之间不会有进气脉冲波的互相干扰。上述可变进气系统的效果在于:每个气缸都会产生空气谐振波的动力效应,而直径较大的空气室、中间的产生谐振空气波的通道同支管一起,形成脉冲波谐振循环系统。 图3-95 双脉冲进气系统示意图 a)低速段(n﹤4400r/min);b)高速段(n﹥4400r/min) 当进气管中动力阀关闭时(见图3-95a),可变进气管容积及总长大约为70cm的进气管,能在发动机转速n=3300r/min时,形成谐振进气压力波,提高了充气效率,使转矩达到最大值。当发动机转速大于4000r/min时,进气管中便不能形成有效的进气压力波,于是动力阀门打开(见图3-95b),两个中间进气通道便连接成一体。优化选择在每个气缸与总管连接的支管容积后,能形成高速(如:n=4400r/min)下谐振进气脉冲波,使转矩值达到较高值。于是在n=1500~5000r/min的范围内,转矩曲线变化平缓,如图3-96所示。 图3-96 采用可变进气系统后的转矩特性(六缸发动机) (2)四气门二阶段进气系统 该进气系统由弯曲的长进气管和短的直进气管与空气室相连接,并分别连接到缸盖的两个进气门上,如图3-97所示。在发动机低、中速工况时由长的弯曲管向发动机供气;而在高速时,短进气管也同时供气(动力阀打开),提高了发动机功率。 在发动机低、中速工况(n﹤3800r/min),动力阀关闭短进气管的通道(见图3-97a)。空气通过长的弯曲气道,使气流速度增加,并且形成较强的涡流,促进良好混合气的形成。此外,进气管的长度能够在进气门即将关闭时,形成较强的反射压力波峰,使进入气缸的空气增加。这都有助于提高发动机低速时的转矩。 在发动机高速工况(n﹥3800r/min),动力阀打开(见图3-97b),额外的空气从空气室经过短进气管进入气缸,改善了容积效率,并且由另一气门进入气缸的这股气流,将低、中速工况形成的涡流改变成滚流运动,更能满足高速高负荷时改善燃烧的需要。 图3-97 四气门二阶段进气系统 a)低速段;b)高速段 (3)三阶段进气系统 该进气系统由末端连在一起的两根空气室管组成,并布置在V形夹角之间。每根空气室通过3根单独的脉冲管连接到左侧或者右侧的气缸上。每一侧气缸形成独立的三缸机,各缸的进气冲程相位为均匀隔开的240°。两根空气室的人口处有各自的节流阀,在两根空气室中部有用阀门控制的连接通道,在空气室末端U形连接管处布置有两个蝶式阀门,如图3-98所示。 图3-98 三阶段进气系统 a)低速(n﹤4000r/min);b)中速(n﹥4000r/min);c)高速(n﹥5000r/min) 在发动机低速工况(n﹤4000r/min)(见图3-98a),两空气室管之间的阀及高速工况用阀关闭。每根空气室管及与其相连接的3根脉冲进气管形成完整的谐振系统,将在一定转速工况下(如:n=3500r/min),将惯性及波动效应综合在一起,从而使充气效率及转矩达到峰值。当发动机转速高于3500r/min时,谐振压力波的波幅值变小,因此可变系统的效果也变差,相应地每个气缸的充气效率也变小。 当发动机转速处于4000~5000r/min之间,即中速工况时(见图3-98b),连接两根空气室的阀门打开,因此部分损坏了低速工况谐振压力波频率,然而却在转速为4500r/min的工况下,形成新的谐振压力波峰,从而使更多的空气或混合气进入气缸。 当发动机转速进一步提高,如:达到5000r/min以上,于是短进气道中蝶阀打开(见图3-98c),在两个空气室之间的短的及直接通道的空气流动,影响了第二阶段的惯性及脉冲效应。然而在高速范围(5000~6000r/min)内,通过各缸进气管的脉冲及谐振作用,建立了新的脉冲压力波及效果。于是三阶段的可变进气系统在三段转速范围内都能形成一个高的转矩峰值,从而提高了整个转速范围内的转矩,使转矩特性更平坦,数值更高。
电力电子实验报告
电力电子实验报告————————————————————————————————作者:————————————————————————————————日期:实验一SCR(单向和双向)特性与触发实验一、实验目的1、了解晶闸管的基本特性。
2、熟悉晶闸管的触发与吸收电路。
二、实验内容1、晶闸管的导通与关断条件的验证。
2、晶闸管的触发与吸收电路。
三、实验设备与仪器1、典型器件及驱动挂箱(DSE01)—DE01单元2、触发电路挂箱Ⅰ(DST01)—DT02单元3、触发电路挂箱Ⅰ(DST01)—DT03单元(也可用DG01取代)4、电源及负载挂箱Ⅰ(DSP01)或“电力电子变换技术挂箱Ⅱa(DSE03)”—DP01单元5、逆变变压器配件挂箱(DSM08)—电阻负载单元6、慢扫描双踪示波器、数字万用表等测试仪器四、实验电路的组成及实验操作图1-1 晶闸管及其驱动电路1、晶闸管的导通与关断条件的验证:晶闸管电路面板布置见图1-1,实验单元提供了一个脉冲变压器作为脉冲隔离及功率驱动,脉冲变压器的二次侧有相同的两组输出,使用时可以任选其一;单元中还提供了一个单向晶闸管和一个双向晶闸管供实验时测试,此外还有一个阻容吸收电路,作为实验附件。
打开系统总电源,将系统工作模式设置为“高级应用”。
将主电源电压选择开关置于“3”位置,即将主电源相电压设定为220V;将“DT03”单元的钮子开关“S1”拨向上,用导线连接模拟给定输出端子“K”和信号地与“DE01”单元的晶闸管T1的门极和阴极;取主电源“DSM00”单元的一路输出“U”和输出中线“L01”连接到“DP01”单元的交流输入端子“U”和“L01”,交流主电源输出端“AC15V”和“O”分别接至整流桥输入端“AC1”和“AC2”,整流桥输出接滤波电容(“DC+”、“DC-”端分别接“C1”、“C2”端);“DP01”单元直流主电源输出正端“DC+”接“DSM08”单元R1的一端,R1的另一端接“DE01”单元单向可控硅T1的阳极,T1的阴极接“DP01”单元直流主电源输出负端“DC-”。
步进电动机伺服系统概述

图6-7 矩角特性
6.2 步 进 电 动 机伺 服系统
图6-8 步进电动机静态矩角特性曲线 图6-9 启动转矩
如图6-8所示,三相步进电动机各相的矩 角特性曲线的相位差为1/3周期,其中曲线 A和曲线B的交点所对应的力矩Tq是电动机 运行状态的最大启动转矩。也就是说,只 有负载转矩TL小于Tq,电动机才能正常启 动运行;否则,容易造成丢步,电动机也 不能正常启动。
(输入信号)
CNl-7 CN1-8
RDY COM
控制回路正常 (输出信号)
输出信号公共点
CNl-9 ZERO
电气循环原点 (输出信号)
单脉冲方式时,正反转方向(DIR DIR )信号
双脉冲方式时,反转脉冲(CCW、CCW )信号
当控制电源、回路正常时,输出低电平信号
RDY、ZERO输出信号的公共点 半步运行时每二十拍送出一电气循环原点 整步运行时每十拍送出一电气循环原点
6.2 步 进 电 动 机伺 服系统
图6-5 步进电动机原示意图
图6-6 三相反应式步进电机工作原理示意图
对每一相绕组通电的操作称为一拍,则A、B、C三相绕组轮流通电需要三
拍,从上面分析可知,电动机转子转动一个齿距需要三拍操作。实际上,电
动机每一拍都转一个角度,也称前进了一步,这个转过的角度称为步距角,
最高工作频率,记为fmax。它是决定定子绕组通电状态最高变化频率的 参数,即决定了步进电动机的最高转速。
6.2 步 进 电 动 机伺 服系统
5.矩频特性 矩频特性T=F(f)所描述的是
步进电动机连续稳定运行时输出 转矩与连续运行频率之间的关系 。如图6-10所示,该特性曲线上 每一频率f所对应的转矩为动态 转矩T。可见,动态转矩的基本 趋势是随连续运行频率的增大而 降低。
步进电机的单脉冲控制、双脉冲控制、开环控制和闭环控制
步进电机的单脉冲控制、双脉冲控制、开环控制和闭环控制
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。
虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
步进电机的单脉冲控制与双脉冲控制步进电机的控制有单电压和高低电压控制之分;
单电压控制用一串脉冲信号控制一个电子开关的通、断来控制电机驱动绕组得电、失电;高低电压控制在单电压控制的基础上,用另一串脉冲控制一个电子开关的通、半导通,两个开关串联,两个控制脉冲同频率但不同相位和宽度。
达到给绕组的供电电压全、一半、迅速关断的目的。
步进电机的开环控制和闭环控制步进电机的开环控制
1、步进电机开环伺服系统的一般构成
步进电动机的电枢通断电次数和各相通电顺序决定了输出角位移和运动方向,控制脉冲分配频率可实现步进电动机的速度控制。
因此,步进电机控制系统一般采用开环控制方式。
图为开环步进电动机控制系统框图,系统主要由控制器、功率放大器、步进电动机等组成。
2、步进电机的控制器
1、步进电机的硬件控制
步进电动机在个脉冲的作用下,转过一个相应的步距角,因而只要控制一定的脉冲数,即。
步进电机的工作原理图解
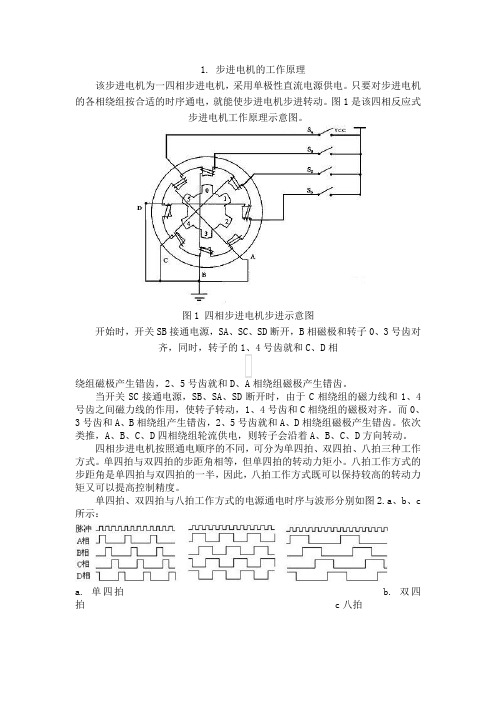
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c 所示:a. 单四拍b. 双四拍 c八拍51单片机驱动步进电机的方法。
驱动电压12V,步进角为7.5度. 一圈360 度, 需要48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
北京斯达微步驱动器(MSa-2H304D)设置说明
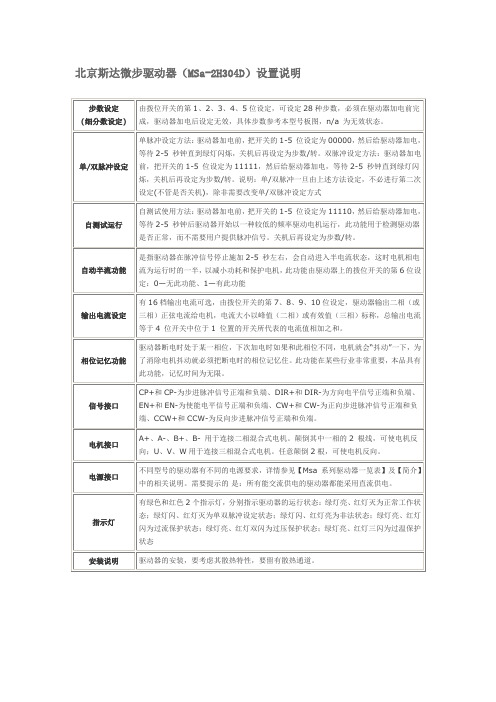
自测试使用方法:驱动器加电前,把开关的1-5位设定为11110,然后给驱动器加电,等待2-5秒钟后驱动器开始以一种较低的频率驱动电机运行,此功能用于检测驱动器是否正常,而不需要用户提供脉冲信号。关机后再设定为步数/转。
自动半流功能
是指驱动器在脉冲信号停止施加2-5秒左右,会自动进入半电流状态,这时电机相电流为运行时的一半,以减小功耗和保护电机,此功能由驱动器上的拨位开关的第6位设定:0—无此功能、1—有此功能
北京斯达微步驱动器(MSa-2H304D)设置说明
步数设定
(细分数设定)
由拨位开关的第1、2、3、4、5位设定,可设定28种步数,必须在驱动器加电前完成,驱动器加电后设定无效,具体步数参考本型号板图,n/a为无效状态。
单/双脉冲设定
单脉冲设定方法:驱动器加电前,把开关的1-5位设定为00000,然后给驱动器加电,等待2-5秒钟直到绿灯闪烁,关机后再设定为步数/转。双脉冲设定方法:驱动器加电前,把开关的1-5位设定为11111,然后给驱动器加电,等待2-5秒钟直到绿灯闪烁,关机后再设定为步数/转。说明:单/双脉冲一旦由上述方法设定,不必进行第二次设定(不管是否关机),除非需要改变单/双脉冲设定方式
信号接口
CP+和CP-为步进脉冲信号正端和负ቤተ መጻሕፍቲ ባይዱ、DIR+和DIR-为方向电平信号正端和负端、EN+和EN-为使能电平信号正端和负端、CW+和CW-为正向步进脉冲信号正端和负端、CCW+和CCW-为反向步进脉冲信号正端和负端。
电机接口
A+、A-、B+、B-用于连接二相混合式电机。颠倒其中一相的2根线,可使电机反向;U、V、W用于连接三相混合式电机。任意颠倒2根,可使电机反向。