可调速的玩具电动车的设计
基于PWM无级调速的玩具车控制的研究
、
图1 所示
遥 控 嚣
接 收 器
电机 及 控 制 部分
图 1 体 框 图 整
采用5 键控 制策略 , 别为加 速前 进 、 速前进 、 分 减 左传 、 右转 、 后退 ( 单速 ) 。前进 和后退 由一直 流电机驱 动 , 用 P 采 WM无级 调速方 式 。 』 左 右 转 向 由另 一 电机 控 制 , 实现 左 右转 向 3 度 。数据 传 输采 用 可 O P 8 7 BP 8 9 8 P 成的编 码懈 码 电路”,T A9 7 T A9 7 /T A 7 B 组 P 8 7 B工作 电压为 1 v 5 v 可 采用 2 M z .一. , 8 0 7 H 或者 4 M z 9 H 两种频 率输 出信号 ( 电路参 数不 同)配合适 当键 盘最多可 以实现五种独立 的信号遥控 。用 5 , 个按键分 别 控 制 , 应 指 令分 别 是 加 速 前进 、 速 前 进 、 传 、 转 、 退 。 对 减 左 右 后 P 8 7B T A9 8 P工 作 电压 为 1 1 v 作 为解码 芯片 , 码后 信号输 入 5 芯 —. , 5 解 1 片 , 求产 生电机控制信号分别控制驱动 电机和转向电机。 按要
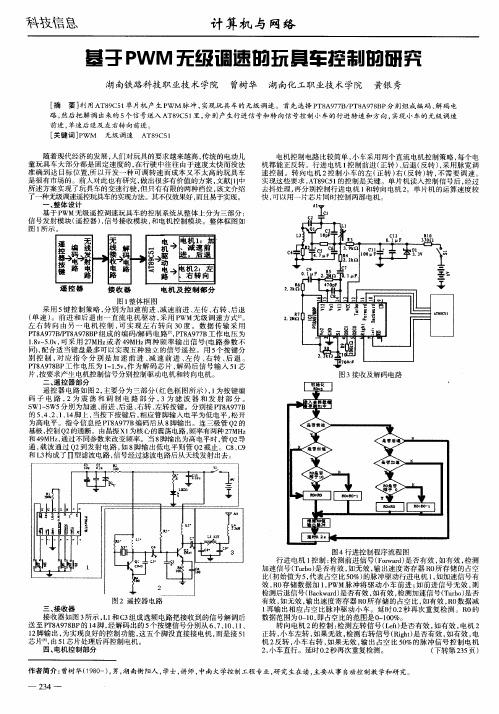
图4行进控制程序流程图 行进 电机 1 控制 : 检测前进信 号 (ow r) F rad 是否有 效 , 如有效 , 检测 加速信号 ( u o是否有效 , Tr ) b 如无效 , 出速度 寄存器 R 所 存储 的 占空 输 0 比( 初始值为 5 代表 占空 比5 %) , 0 的脉 冲驱动行进 电机 1如加速信号有 , 效 ,0 R 存储 数据加 1 P , WM脉冲将驱 动小车前 进 ; 如前进 信号无效 , 则 检测后退信号 ( ak a ) B c w r 是否有效 , 效 , d 如有 检测加 速信号 ( ub ) T ro是否 有效 , 如无 效 , 出速度 寄存器 R 所存储 的占空比 , 输 0 如有效 , 0 R 数据减 1 再输 出相应 占空 比脉 冲驱 动小车 。延 时 0 秒再次 重复检测 。R 的 . 2 0 数据范 围为 0 1 , — 0 即占空 比的范 围是 0 10 - 0 %。 转 向电机 2 的控制 : 检测左转 信号 ( e ) L f 是否有效 , t 如有效 , 电机 2 正转 , 车左转 , 小 如果无效 , 检测右转信号 ( i t是否有效 , Rg ) h 如有效 , 电 机2 反转 , 车右转 , 小 如果无效 , 出占空 比5 %的脉 冲信号控 制 电机 输 0 2 小车直行。延时 0 秒再次重复检测。 , . 2 ( 下转第 2 5 路
毕业设计(论文)-智能玩具车系统设计[管理资料]
![毕业设计(论文)-智能玩具车系统设计[管理资料]](https://img.taocdn.com/s3/m/c985892aa58da0116d17499f.png)
智能玩具车系统设计摘要:本文主要以单片机为控制核心,完成无线遥控,红外线对管的自动寻迹,红外线自动避障和语音控制等模块设计。
通过调试检测各模块,得到正确的信号输出,通过单片机的控制,将各模块有效整合在一起,达到智能控制目标。
关键词:51单片机红外线传感器语音控制玩具小车。
1引言随着汽车工业的迅速发展,关于汽车的研究也就越来越受人关注。
全国电子大赛和省内电子大赛几乎每次都有智能小车这方面的题目,全国各高校也都很重视该题目的研究。
可见其研究意义很大。
本文设计的智能玩具小车应该能够实时显示时间、速度、测距、避障功能、准确定位停车。
根据题目的要求,本设计的设计思路如下:在现有玩具车的基础上,加装光电、红外线、超声波传感器及金属探测器,实现对电动车的速度、位置、运行状况的实时测量,并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动车的智能控制。
2总体方案设计:采用AT89C51单片机作为整机的控制单元以AT89C51单片机为核心的控制电路,采用模块化的设计方案,运用光电传感器、金属探测传感器、超声波传感器组成不同的检测电路,实现小车在行驶中自动寻迹、障碍物报警、测量里程等问题。
并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动小车的智能化控制。
在本系统中,先将信号传送到单片机系统进行处理,使小车沿轨道自主行走;电感式接近开关电路代替传感器探测障碍物,并发出声光信息进行提示;通过霍尔元件测量小车行驶里程;采用H型脉冲宽度调制(PWM)全桥式驱动电路控制电机的转向,实现电动小车的正反向行驶、快慢速行驶及转弯;采用LCD1602实时显示小车行驶的时间。
此系统比较灵活,采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,具有高度的智能化、人性化,一定程度体现了智能,能满足系统的要求。
此方案如图1所示:图1方案一原理图方案二:采用类数字电路来组成电动小车的控制系统采用数字电路对外围探测轨迹信号,检测信号,避障报警信号,寻找源信号分部进行处理。
毕业设计(论文)-玩具电动车的结构设计
毕业设计题目玩具电动车的结构设计学生姓名学号系部专业班级指导教师二〇一五年X月摘要我国是全球第一大玩具生产国,其中玩具车玩具一直以来都是儿童和成人最受欢迎的产品,目前市场上玩具多种多样,最出名的就是固高玩具。
目前,随着人们生活水平的不断提高,玩具不再是儿童的专属产品,很多年前收藏爱好者也是玩具消费的庞大群体。
本设计设计一款儿童电动玩具车,其主要面对的消费群体是2岁以上的儿童。
它包括车身、后轮驱动装置、转向装置、操作面板和动力电源组成。
本次毕业设计的主要任务是完成整个儿童玩具车的设计,本文完成整机的设计计算,包括后驱动装置的设计,转向系统的设计等,然后利用SOLIDWORKS完成整机三维工程图的绘制,最后生成二维工程图。
关键词:玩具儿童玩具车三维工程图二维工程图全套图纸三维加AbstractChina is the world's largest toy producer, in which the robot toy has been adult children and the most popular products, currently on the market a variety of toys, the most famous is Gugao toys. At present, with the continuous improvement of people's living standard, the toy is no longer the exclusive products for children, a large group of enthusiasts many years ago is toy consumption. The design of a children electric toy car, the main face of the consumer groups are children over 2 years old. It includes the body, the rear wheel driving device, steering device, operation panel and power supply. The main task of this graduation design is the design of the children's toy car, this paper completed the calculation of the design, including the design of rear driving device, steering system design, and then use SOLIDWORKS to complete the drawing of the 3D drawing, the last generation of two-dimensional engineering drawing.Keywords: toy toy vehicle 3D drawing two-dimensional engineering drawings目录摘要 (i)Abstract (ii)第一章绪论 (1)1.1课题研究的目的与意义 (1)1.2 我国玩具行业的发展概况 (1)1.3 我国玩具行业的消费现状 (2)1.4 玩具行业的发展前景 (3)1.4.1传统玩具向电子玩具过渡 (3)1.4.2 提高玩具附加值势在必行 (3)1.5本课题研究的内容及方法 (4)1.5.1 研究内容 (4)1.5.2拟定解决问题的方法 (4)第二章玩具电动车的总体设计方案 (5)2.1 玩具车运动方式的选择 (5)2.2转向系统的确认 (6)2.3 驱动装置的结构方案 (7)2.4 总体方案拟定 (7)2.5本章小结 (8)第三章玩具电动车整体结构的设计 (9)3.1驱动电机的选择 (9)3.2 前轮三角支撑杆的有限元分析 (11)3.2.1 前轮三角支撑杆零件的三维建模 (12)3.2.2 确定材料 (12)3.2.3 添加夹具 (13)3.2.4 施加载荷 (14)3.2.5 生成网格 (14)3.2.6 运算求解 (15)3.2.7 分析结果输出 (16)4.1 Solidworks软件简介 (19)4.2 座椅的造型 (20)4.3 方向盘的造型 (21)4.4 车轮圈的造型 (21)4.5 车身的造型 (22)4.6 控制面板造型 (23)4.7 外胎的造型 (24)4.7 玩具电动车的装配 (24)4.8 三维向二维的转换 (26)第五章结论 (29)5.1 本论文所取得的结果 (29)5.2 技术展望 (29)参考文献 (30)致谢 (31)第一章绪论1.1课题研究的目的与意义中国是玩具大国,玩具出口在我国的外贸出口中占主要地位。
简易智能电动车的设计与制作

简易智能电动车的设计与制作介绍本文档将介绍如何设计和制作一辆简易智能电动车。
智能电动车是一种环保、高效的交通工具,有着越来越广泛的应用。
我们将主要涵盖以下内容: 1. 设计目标与需求 2. 器材与零件的选择 3. 构造与装配过程 4. 控制系统的设计与实现 5. 测试与优化 6. 结论与展望1. 设计目标与需求首先,我们需要明确设计目标与需求,以确保设计满足用户的期望。
以下是一些常见的设计目标和需求: - 轻便:车辆整体重量不超过一定限制,以提高操控性和节能性。
- 高效:电路和电池的设计要尽量提高能量转化和储存效率。
- 安全:车辆需要具备一定的安全措施,如制动系统和防撞装置等。
- 智能化:车辆的控制系统需要具备一定的智能特性,如自动巡航和避障等。
- 成本低廉:设计需要尽量选用经济实惠的材料和零件,以降低生产成本。
2. 器材与零件的选择在设计智能电动车时,我们需要选择适当的器材和零件来满足设计目标和需求。
2.1 电动机选择合适的电动机至关重要,它将提供车辆的动力。
常见的电动机类型包括直流无刷电动机和步进电机。
我们需要根据设计需求选择适合的电动机类型,考虑功率、转速和电流等因素。
2.2 控制系统为了实现智能化功能,我们需要设计一个控制系统。
这个系统将负责监测车辆的状态并做出相应的决策。
控制系统的核心部分是微控制器或单片机。
根据需求选择适合的微控制器,考虑处理能力、接口和编程环境等因素。
2.3 电池和电源管理电池是车辆的能源来源,因此选择适当的电池很重要。
常用的电池类型包括锂电池和铅酸电池。
我们需要根据需求选择适合的电池类型,并设计一个电源管理系统来管理电池的充电和放电过程,以确保电池的寿命和安全。
2.4 传感器与执行器为了实现智能化功能,我们需要选择适当的传感器和执行器。
传感器可以用于检测车辆的状态,如速度、位置和距离等。
执行器可以用于执行某些操作,如制动和转向等。
常用的传感器和执行器包括超声波传感器、红外线传感器和舵机等。
乐高电动小车的原理

乐高电动小车的原理乐高电动小车是利用乐高积木搭建的一种电动玩具车辆。
它的原理主要涉及电动机、电池、齿轮传动以及电路控制等方面。
下面将详细介绍乐高电动小车的原理。
首先,乐高电动小车的核心是电动机。
电动机是将电能转化为机械能的装置。
乐高电动小车通常采用直流电动机,该电动机占用较小的空间,能够以高速运转,并且具有较高的扭矩。
乐高电动小车的电动机由金属电刷、线圈和磁场组成。
通过通电,电流在线圈中流动,产生磁场和电磁感应力,从而使电动机转动。
其次,乐高电动小车需要电池提供电能。
电池是装有化学反应物质的设备,能将化学能转化为电能。
乐高电动小车通常采用干电池,例如AA电池。
将电池与电动机连接,电流从电池中流出,经过电动机产生转动,实现小车的行驶。
乐高电动小车使用电池来提供持续并可靠的电能供应,用于驱动电动机运行。
此外,乐高电动小车通过齿轮传动实现动力的传递。
齿轮是一种转动的机械零件,通过齿轮之间的啮合,可以实现不同转速和转矩的转动。
乐高电动小车内部设置了一系列的齿轮,通过不同大小和不同形状的齿轮组合,将电动机的转动转移到车轮上,从而推动小车前进或后退。
这些齿轮通常由乐高积木的零件构成,可以通过组合来实现不同的速度和动力输出。
最后,乐高电动小车还涉及电路控制。
为了实现小车的前进、倒退以及转向等功能,通常需要对电路进行控制。
乐高电动小车的电路控制通常使用开关和线路连接来实现。
开关可以打开或关闭电路,使电流的通断得以控制。
通过合理设计电路连接方式,例如串联或并联电动机,可以实现正转和反转的控制。
通过调整电路中电阻的数值,还可以实现不同的转速控制。
此外,通过改变电动机旋转的方向,也可以实现小车的转向功能。
总之,乐高电动小车的原理主要包括电动机的转动、电池的供电、齿轮传动以及电路控制这几个方面。
通过这些原理的相互作用,乐高电动小车能够实现前进、后退、转向等功能,为孩子们带来趣味和乐趣。
基于单片机的智能玩具电动车的设计与实现

基于单片机的智能玩具电动车的设计与实现基于单片机的智能玩具电动车的设计与实现引言:随着科技的迅速发展,智能玩具电动车逐渐成为儿童喜爱的玩具之一。
本文将介绍一种基于单片机的智能玩具电动车的设计与实现。
通过引入单片机技术和传感器,该电动车具备了自动驾驶、避障和追踪等功能,为儿童带来更加有趣、智能化的玩乐体验。
一、设计方案本设计选择单片机作为控制核心,利用其强大的功能和灵活的编程特点,实现智能玩具电动车的各项功能。
电动车的设计包括以下几个关键要素:1. 结构设计:选择适合儿童使用的材质和外观设计,保证安全性和可操作性;2. 电机驱动:使用直流电机和电源系统,控制车辆的前进、后退和转向;3. 电源管理:利用电源管理模块和锂电池,实现对电动车的供电和电池状态的监测;4. 传感器应用:借助距离传感器和摄像头,实现智能驾驶、避障和追踪功能;5. 控制系统:通过单片机控制车辆的各项功能,收集并处理传感器数据,实现智能化控制。
二、功能实现1. 自动驾驶功能:通过激光传感器或红外传感器,检测车辆周围环境,并根据预设的路径自动行驶。
通过单片机对电机进行控制,实现智能驾驶。
2. 避障功能:借助超声波传感器,检测车辆前方障碍物的距离,一旦检测到障碍物,自动转向或停止前进,以避免碰撞。
通过单片机的程序控制,实现避障功能的自动化。
3. 追踪功能:借助摄像头传感器,实时监测车辆周围的场景,并识别出特定目标进行追踪。
通过单片机的图像处理算法,使电动车能够智能追踪目标,并保持一定距离。
4. 远程控制功能:通过手机App或遥控器,实现对电动车的远程控制,包括前进、后退、左转和右转等功能。
通过单片机的蓝牙或无线模块,与远程设备进行通信,实现远程控制功能。
三、实现细节1. 结构设计:选择轻量化的材料,确保车辆的结构坚固而稳定。
考虑儿童的使用特点,车辆外观采用可爱、吸引人的设计。
2. 电机驱动:通过单片机的PWM输出控制电机的转速和方向,实现电动车的前进、后退和转向功能。
简便电动小推车设计理念
简便电动小推车设计理念简便电动小推车设计理念:本设计理念以提高用户操作便利性和提升机动性为核心,致力于打造一款简便电动小推车,方便用户在生活、工作等各个场景中使用。
以下是几个关键设计理念:1. 折叠设计:为了方便携带和存放,该电动小推车采用了可折叠设计。
用户只需通过简单的操作,即可将推车折叠成较小的尺寸,方便携带到不同场所。
同时,在使用时也可以根据不同需求进行展开调节,提供更大的容量和承载能力。
2. 轻便材质:为了减轻用户的负担,该电动小推车采用了轻便的材质,如高强度的合金材料。
不仅保证了推车的结构稳固性,还能有效减少整车的重量,方便用户操作和携带。
3. 电动驱动:为了节省用户的体力和提高推车的机动性,该电动小推车配备了电动驱动系统。
用户只需通过简单的按钮操作,即可启动电动驱动系统,推车将自动行驶,减少了用户的体力消耗。
同时,电动驱动系统还可根据用户的需求进行速度和转向调节,提高推车的机动性。
4. 多功能设计:为了提高推车的实用性,该电动小推车还设计了多种功能模块。
例如,推车的载货区域可以根据用户需求进行模块化设计,方便用户存放不同类型的物品。
同时,推车的把手区域还可以进行多种功能设置,如可伸缩设计、可调节高度等,方便用户在不同场景中使用。
5. 智能控制系统:为了提升推车的智能性和用户体验,该电动小推车还配备了智能控制系统。
该系统可以通过用户手机或其他智能设备进行远程控制和监控,用户可以随时了解推车的状态和位置。
同时,智能控制系统还可以进行自动规划行驶路线和智能调节速度等功能,提升了推车的智能化水平。
总之,这款简便电动小推车的设计理念旨在提升用户操作便利性和提高机动性,为用户带来更加便捷的使用体验。
通过折叠设计、轻便材质、电动驱动、多功能设计和智能控制系统的应用,将为用户的生活和工作带来更多便利。
好来好来喜帕加尼儿童电动车功能说明

好来好来喜帕加尼儿童电动车功能说明好来好来喜帕加尼儿童电动车是一款专为儿童设计的电动车,具有多种功能,能够满足孩子们的各种需求。
以下将详细介绍好来好来喜帕加尼儿童电动车的功能说明。
外观设计好来好来喜帕加尼儿童电动车采用了时尚、简约、可爱的外观设计,车身造型仿照了著名跑车品牌Pagani的经典款式,颜色鲜艳,线条流畅。
整个车身采用高强度ABS塑料材质制作而成,坚固耐用,不易损坏。
驾驶方式好来好来喜帕加尼儿童电动车可以通过踏板控制前进和倒退,也可以通过遥控器进行遥控操作。
遥控器拥有前进、后退、左转、右转等多种功能按钮,可以方便地对车辆进行遥控操作。
当孩子自己驾驶时,家长也可以通过遥控器对其进行监管和干预。
安全保障好来好来喜帕加尼儿童电动车配备了多项安全保障措施,保证孩子的行车安全。
首先是电子刹车系统,当孩子松开踏板时,车辆会自动停止前进。
其次是安全带,可以将孩子固定在座位上,防止意外摔落。
另外还配备了防侧翻系统和防撞杆,保护孩子的人身安全。
音乐娱乐好来好来喜帕加尼儿童电动车内置多种音乐和故事资源,可以通过按键或遥控器进行选择和播放。
音乐和故事资源丰富多彩,可以让孩子在驾驶过程中享受到更多的乐趣。
灯光效果好来好来喜帕加尼儿童电动车配备了多种灯光效果,包括前大灯、后尾灯、转向灯等。
这些灯光效果不仅美观实用,还能提高行车安全性。
电池续航好来好来喜帕加尼儿童电动车采用高品质锂电池供电,续航能力强。
一次充电可以支持长时间使用,并且充电时间较短。
适用年龄好来好来喜帕加尼儿童电动车适用于3-8岁的儿童,最大承载重量为30公斤。
车辆大小适中,可以满足孩子们的驾驶需求。
总结好来好来喜帕加尼儿童电动车是一款功能丰富、安全可靠、外观时尚的电动车,适合3-8岁的儿童使用。
它采用高品质材料制作而成,具有多种驾驶方式和安全保障措施,可以让孩子在驾驶过程中享受到更多的乐趣。
同时,它还配备了多种音乐和故事资源以及灯光效果,能够提高孩子们的娱乐体验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
可调速的电动玩具车的设计与制作
1.绪论
1.1 选题背景
随着科技的发展,一切都在向高科技迈进,近几年玩具发展可谓“火箭式的飞跃”,不论是种类还是数量都得到了空前的发展,这些发展主要表现为三个方面:一个是技术含量高,强调玩具质量与安全。
现代玩具多数可以电动变形、能哭会笑,甚至能与人对话,并且强调玩具质量与安全,玩具越来越向着科技化、人性化、互动化的方向发展。
另一个是热门卡通影集或电影搭配行销的玩具和成人玩具得到很大发展,这些玩具随着时代的发展也愈加流行。
三是玩具具有创意性或教育性的功能。
1.2 可调速的电动玩具车可行性分析
中国是全球玩具第一大生产国。
我国电动玩具行业是从上世纪80年代后发展起来,70%以上还是来料加工和来样加工,自主开发和创新的能力不强,能够以自创品牌出口的还为数不多,要从依附式发展转向自主式发展还需要一定的过程。
而如今玩具智能化成为玩具行业发展的新趋势。
高科技智能化玩具不仅满足了儿童的好奇心,加强了孩子和玩具的互动,同时也激发了孩子的求知欲,开发了孩子的智力以及动手能力。
玩具企业将计算机、电子、通讯等领域内的先进技术“嫁接”到玩具产品中,突破了传统玩具的局限性和单一性。
考虑到玩具电动车的美好前景,我认为在玩具电动车领域开发一款可以调速的玩具电动车是十分必要的,而且未来的发展前景一定很好。
由于555集成电路功能强大,可实现多种功能并且成本较低,可行性较高,所以我选择设计的可调速的玩具电动车主要是运用555集成电路来实现的,设计思想主要是通过调节555振荡器的充电时间常数来调节玩具电动机的转速。
2 555定时器
2.1 555定时器的概述
555 定时器是一种模拟和数字功能相结合的中规模集成器件。
一般用双极性工艺制作的称为555,用CMOS 工艺制作的称为7555,除单定时器外,还有对
应的双定时器556/7556。
555 定时器的电源电压范围宽,可在 4.5V~16V 工作,7555 可在3~18V 工作,输出驱动电流约为200mA,因而其输出可与TTL、CMOS 或者模拟电路电平兼容。
555 定时器成本低,性能可靠,只需要外接几个电阻、电容,就可以实现多谐振荡器、单稳态触发器及施密特触发器等脉冲产生与变换电路。
它也常作为定时器广泛应用于仪器仪表、家用电器、电子测量及自动控制等方面。
它内部包括两个电压比较器,三个等值串联电阻,一个RS 触发器,一个放电管T 及功率输出级。
它提供两个基准电压VCC /3 和2VCC /3。
2.2 555定时器的功能
555 定时器的功能主要由两个比较器决定。
两个比较器的输出电压控制RS 触发器和放电管的状态。
在电源与地之间加上电压,当 5 脚悬空时,则电压比较器A1 的反相输入端的电压为2VCC /3,A2 的同相输入端的电压为VCC /3。
若触发输入端TR 的电压小于VCC /3,则比较器A2 的输出为1,可使RS 触发器置1,使输出端OUT=1。
如果阈值输入端TH 的电压大于2VCC/3,同时TR 端的电压大于VCC /3,则A1 的输出为1,A2 的输出为0,可将RS 触发器置0,使输出为0 电平。
555定时器可以说是模拟电路与数字电路结合的典范。
两个比较器C1和C2各有一个输入端连接到三个电阻R组成的分压器上,比较器的输出接到RS触发器上。
此外还有输出级和放电管。
输出级的驱动电流可达200mA。
比较器C1和C2的参考电压分别为UA和UB,根据C1和C2的另一个输入端——触发输入和阈值输入,可判断出RS触发器的输出状态。
当复位端为低电平时,RS触发器被强制复位。
若无需复位操作,复位端应接高电平。
2.3 555定时器的应用
(1)构成施密特触发器,用于TTL系统的接口,整形电路或脉冲鉴幅等;
(2)构成多谐振荡器,组成信号产生电路;
(3)构成单稳态触发器,用于定时延时整形及一些定时开关中。
555应用电路采用这3种方式中的1种或多种组合起来可以组成各种实用的
电子电路,如定时器、分频器、脉冲信号发生器、元件参数和电路检测电路、玩具游戏机电路、音响告警电路、电源交换电路、频率变换电路、自动控制电路等。
555时基电路是一种将模拟功能与逻辑功能巧妙地结合在同一硅片上的组合集成电路。
该电路可以在最基本的典型应用方式的基础上,根据实际需要,经过参数配置和电路的重新组合,与外接少量的阻容元件就能构成不同的电路,因而555电路在波形的产生与变换、测量与控制、家用电器、电子玩具等许多领域中都得到了广泛应用。
2.4 555时基电路的电路结构和逻辑功能
2.4.1 电路结构及逻辑功能
图1.1 555时基电路的电路结构和引脚图
由图可知555电路由电阻分压器、电压比较器、基本RS触发器、放电管和输出缓冲器5个部分组成。
它的各个引脚功能如下:
1脚:GND(或Vss)外接电源负端VSS或接地,一般情况下接地。
2脚:TR低触发端。
3脚:OUT(或V o)输出端。
4脚:R是直接清零端。
当R端接低电平,则时基电路不工作,此时不论TR、TH处于何电平,时基电路输出为“0”,该端不用时应接高电平。
5脚:CO(或VC)为控制电压端。
若此端外接电压,则可改变内部两个比较器的基准电压,当该端不用时,应将该端串入一只0.01μF电容接地,以防引入干扰。
6脚:TH高触发端。
7脚:D放电端。
该端与放电管集电极相连,用做定时器时电容的放电。
电
阻分压器由三个5kΩ的等值电阻串联而成。
电阻分压器为比较器C1、C2提供参考电压,比较器C1的参考电压为2/3Vcc ,加在同相输入端,比较器C2的参考电压为1/3Vcc ,加在反相输入端。
比较器由两个结构相同的集成运放C1、C2组成。
高电平触发信号加在C1的反相输入端,与同相输入端的参考电压比较后,其结果作为基本RS 触发器R 端的输入信号;低电平触发信号加在C2的同相输入端,与反相输入端的参考电压比较后,其结果作为基本RS 触发器S 端的输入信号。
基本RS 触发器的输出状态受比较器C1、C2的输出端控制。
8脚:VCC(或VDD)外接电源VCC ,双极型时基电路VCC 的范围是4.5~16V ,CMOS 型时基电路VCC 的范围为3~18V 。
一般用5V 。
在1脚接地,5脚未外接电压,两个比较器C1、C2基准电压分别为2/3Vcc ,1/3Vcc 的情况下,555时基电路的功能表如表1.1所示:
表1.1 555时基电路的功能表
2.4.2 555时基电路的主要参数
555时基电路的主要参数有电源电压、静态电流、定时精度、阈值电压、阈值电流、触发电压、触发电流、复位电压、复位电流、放电电流、驱动电流及最高工作频率。
电源电压:4.5——16V
静态电流:10mA
定时精度:1%
阀值电压:cc V 3
2 阀值电流:0.1uA
触发电压:cc V 3
1 触发电流:0.5uA
复位电压:1V
复位电流:400uA
放电电流:200mA
驱动电流:200mA
最高工作频率:500kHz
2.5 可调速的电动玩具车电路工作原理
可调速的电动玩具车电路是以一个555为核心组成的,通过调节555振荡器的充电时间常数,来调节玩具电动车电动机的转速。
555和R1、R2、R3、RP 及C1等组成一个无稳态多谐振荡器。
在刚通电时,由于C1上的电压不会突变,TRIG 的低电位使555先处于置位状态,OUT 端输出的高电位使三极管VT 导通,电动机得电运转。
当C1通过R1、RP 、R2充电至Uc≥2/3VDD (4V )时,555翻转复位,OUT 端转成低电平,VT 截止,电动机M 失电,电动车依靠惯性滑行。
此时,C1上的电荷通过R3、D1向芯片内的放电管泄放,即放电回路与充电回路由于D1的接入是分开的,且由于RP+R2的阻值远大于R3,放电主要是在R3上进行。
多谐振荡器的振荡频率为
c f =)132144.1C R R RP R +++
电路如图1.2所示:
图1.2可调速的电动玩具车电路工作原理图
图中电路参数的振荡频率在0.53~2Hz。
调节RP,可调节其振荡频率,实际上是调节电路的充电时间常数,从而调整电动机M的通电时间,并达到调节电动机转速的目的。
跨越在电动机M两端的电容器C3起平滑作用,可消除直流电动机的电刷火花,并使调速更平稳,同时对防止晶体管VT被反向击穿也有好处。
3.结论
经过这段时间的设计,可调速的电动玩具车电路基本设计完成。
本课程设计主要以555集成电路为核心,通过调节555振荡器的充电时间常数来调节玩具电动车电动机的转速。
该课程设计主要涉及到利用555集成电路的特性设计能调速的玩具电动车电路图、分析工作原理、用protel 99软件绘制电路原理图,并对电路工艺进行设计绘制PCB板,利用仿真软件对电路进行仿真。
本设计经验证可
行,设计电路基本符合要求。
参考文献
[1]毕满清,电子技术实验与课程设计,机械工业出版社,2003 [2]张建华,数字电子技术,机械工业出版社,2003
[3]王远,模拟电子技术,机械工业出版社,2003
[4]童诗白,模拟电子技术基础,高等教育出版社,1999
[5]阎石,数字电子技术基础,高等教育出版社,1999。