自动控制MATLAB实验
自动控制matlab报告
自动控制原理实验报告 ——控制系统的阶跃响应09021209 侯竟骁一、实验目的 1、观察学习控制系统的单位阶跃响应; 2、记录单位阶跃响应曲线; 3、掌握时间响应分析的一般方法。
二、实验步骤 1、开机执行程序c:\ml\bin\matlab-s.exe(用鼠标双击图标)进入MATLAB 命令窗口:“Command Windows ”。
2、建立系统模型 在MATLAB 命令窗口上,以立即命令方式建立系统的传递函数。
在MATLAB 下,系统传递函数有三种描述方式,在实验中只用到多项式模型和零点极点模型 多项式模型)()()(s s s den num G =式中“num(s)”表示分子多项式的系数,“den(s)”表示分母多项式的系数,全部按照复自变量s 的降幂排列,以行向量的方式输入。
例如,程序为 num=[0 1 3]; 分子多项式系数 den=[1 2 2 1]; 分母多项式系数 printsys(num,den); 构造传递函数G(s)并显示 零点极点模型∏∏--=ni mj s s s )()()(p z k G式中,k 为增益值,z j 为第j 个零点值,p i 为第i 个零点值。
例如,程序为 k=2; 赋增益值,标量 z=[1]; 赋零点值,向量 p=[-1 2 -3]; 赋极点值,向量 [num,den]=zp2tf(z,p,k); 零点极点模型转换成多项式模型 printsys(num,den); 构造传递函数G(s)并显示给定系统传递函数)(s G 的多项式模型,求系统的单位脉冲响应。
传递函数为)()()(s s s den num G =式中,num (s)为系统传递函数)(s G 的分子多项式系数向量,den (s)为系统传递函数)(s G 的分母多项式系数向量。
函数格式1:给定num 、den 求系统的阶跃响应。
时间向量t 的范围自动设定。
函数格式2:时间向量t 的范围可以由人工给定。
(最新版)自动控制原理MATLAB仿真实验报告
实验一 MATLAB及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;二、预习要点1、系统的典型响应有哪些?2、如何判断系统稳定性?3、系统的动态性能指标有哪些?三、实验方法(一)四种典型响应1、阶跃响应:阶跃响应常用格式:1、;其中可以为连续系统,也可为离散系统。
2、;表示时间范围0---Tn。
3、;表示时间范围向量T指定。
4、;可详细了解某段时间的输入、输出情况。
2、脉冲响应:脉冲函数在数学上的精确定义:其拉氏变换为:所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式:①;②③(二)分析系统稳定性有以下三种方法:1、利用pzmap绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den) 运行结果: p =-1.7680 + 1.2673i -1.7680 - 1.2673i 0.4176 + 1.1130i 0.4176 - 1.1130i -0.2991P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
自动控制原理 matlab实验报告
自动控制原理实验(二)一、实验名称:基于MATLAB的控制系统频域及根轨迹分析二、实验目的:(1)、了解频率特性的测试原理及方法;(2)、理解如何用MATLAB对根轨迹和频率特性进行仿真和分析;(3)、掌握控制系统的根轨迹和频率特性两大分析和设计方法。
三、实验要求:(1)、观察给定传递函数的根轨迹图和频率特性曲线;(2)、分析同一传递函数形式,当K值不同时,系统闭环极点和单位阶跃响应的变化情况;(3)、K值的大小对系统的稳定性和稳态误差的影响;(4)、分析增加系统开环零点或极点对系统的根轨迹和性能的影响。
四、实验内容及步骤(1)、实验指导书:实验四(1)、“rlocus”命令来计算及绘制根轨迹。
会出根轨迹后,可以交互地使用“rlocfind”命令来确定点击鼠标所选择的根轨迹上任意点所对应的K值,K值所对应的所有闭环极点值也可以使用形如“[K, PCL] = rlocfind(G1)”命令来显示。
(2)、波特图:bode(G1, omga)另外,bode图还可以通过下列指令得出相位和裕角:[mag,phase,w] = bode(sys)(3)、奈奎斯特图:nuquist(G, omega)(2)课本:例4-1、4-2、4-7五实验报告要求(1)、实验指导书:实验四思考题请绘制下述传递函数的bode图和nyquist图。
1. 根据实验所测数据分别作出相应的幅频和相频特性曲线;2. 将思考题的解题过程(含源程序)写在实验报告中。
幅频特性曲线相频特性曲线Gs = zpk([10], [-5; -16; 9], 200)subplot(1, 2, 1)bode(Gs)gridsubplot(1, 2, 2)nyquist(Gs)grid(2)课本:例4-1、4-2、4-7图像结果:程序:Gs = zpk([-1], [0; -2; -3],1) rlocus(Gs)图像结果:程序:Gs = zpk([-2], [-1-j; -1+j],1) rlocus(Gs)程序:K=[0.5 1 2]for i=1:1:3num=[1,1,0,0]; den=[1,1,K(i)]; sys=tf(num,den); rlocus(sys); hold ongrid onend图像结果:目标:改变增益K和转折频率依次调节源程序:k1=[4.44,10,20];num=[1,2];den=conv([1,1],[1,2,4]);%一阶转折频率 1/T(wn1=2,wn2=1)二阶转折频率 wn3=wn'=2,伊布西塔=1/2 num1=[1,1];den1=conv([1,2],[1,2,4]);%一阶转折频率 1/T(wn1=1,wn2=2)二阶转折频率 wn3=wn'=2,伊布西塔=1/2 t=[0:0.1:7]; %for i=1:3g0=tf(k1(i)*num,den);g=feedback(g0,1);[y,x]=step(g,t);c(:,i)=y;g1=tf(k1(i)*num1,den1);g(1)=feedback(g1,1);[y1,x]=step(g(1),t);c1(:,i)=y1;endplot(t,c(:,1),'-',t,c(:,2),'-',t,c(:,3),'-',t,c1(:,1),'-',t,c1(:,2), '-',t,c1(:,3),'-');gridxlabel('Time/sec'),ylabel('out')结果分析:在本题中(1)改变k值:k值越大,超调量越大,调节时间越长,峰值时间越短,稳态误差越小(2)改变转折频率:超调量,调节时间,峰值时间,稳态误差同样有相应的变化。
自动控制原理MATLAB仿真实验报告

实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些2、 如何判断系统稳定性3、 系统的动态性能指标有哪些 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y =(二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果: p =+ - + -P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
MATLAB自动控制原理实验
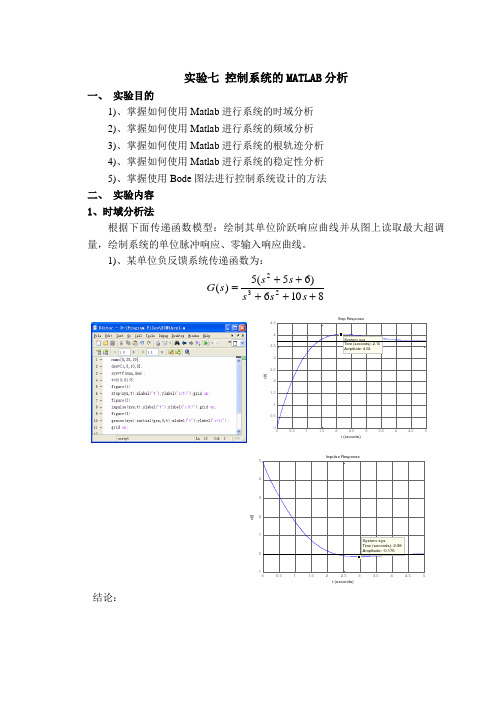
实验七 控制系统的MATLAB 分析一、 实验目的1)、掌握如何使用Matlab 进行系统的时域分析 2)、掌握如何使用Matlab 进行系统的频域分析 3)、掌握如何使用Matlab 进行系统的根轨迹分析 4)、掌握如何使用Matlab 进行系统的稳定性分析 5)、掌握使用Bode 图法进行控制系统设计的方法 二、 实验内容 1、时域分析法根据下面传递函数模型:绘制其单位阶跃响应曲线并从图上读取最大超调量,绘制系统的单位脉冲响应、零输入响应曲线。
1)、某单位负反馈系统传递函数为:8106)65(5)(232+++++=s s s s s s Gt (seconds)c (t )t (seconds)c (t )结论:2)、典型二阶系统传递函数为:2222)(nn nc s s s G ωξωω++= 当ζ=0.7,ωn 取2、4、6、8、10、12的单位阶跃响应。
Step ResponseTime (seconds)00.51 1.52 2.53 3.54结论:3)、典型二阶系统传递函数为:2222)(nn nc s s s G ωξωω++= 当ωn =6,ζ取0.2、0.4、0.6、0.8、1.0、1.5、2.0的单位阶跃响应。
Time (seconds)结论:2、频率分析法根据下面传递函数模型,绘制出系统的频率响应曲线,包括Bode 图和Nyquist 图,并从图上读取相角交接频率、截止频率,并求出幅值裕度和相角裕度。
1)、典型二阶系统传递函数为:2222)(nn nc s s s G ωξωω++= 当ζ=0.7,ωn 取2)、4)、6)、8、1)0、1)2)的伯德图和奈奎斯特图。
Wn=2M a g n i t u d e (d B )10101010P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/s) , Pm = 164 deg (at 0.4 rad/s)Frequency (rad/s)Real AxisI m a g i n a r y A x i sWn=4M a g n i t u d e (d B )10101010P h a s e (d e g )Bode DiagramFrequency (rad/s)Real AxisI m a g i n a r y A x i sWn=6M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/s)Real AxisI m a g i n a r y A x i sWn=8M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/s)Real AxisI m a g i n a r y A x i sWn=10M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/s)Real AxisI m a g i n a r y A x i sWn=12M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/s)Real AxisI m a g i n a r y A x i s2)、典型二阶系统传递函数为:2222)(nn nc s s s G ωξωω++= 当ωn =6,ζ取0.2、0.4、0.6、0.8、1.0、1.5、2.0的伯德图和奈奎斯特图。
《自动控制原理》Matlab求解控制系统频域分析实验

《自动控制原理》Matlab求解控制系统频域分析实验
一、实验目的
1、加深了解系统频率特性的概念。
2、学习使用Matlab软件绘制Nyquist图、Bode图的基本方法。
3、掌握典型环节的频率特性。
二、实验仪器
Matlab2014b版
三、实验原理
1.奈奎斯特图(幅相频率特性图)
MATLAB为用户提供了专门用于绘制奈奎斯特图的函数nyquist
axis([-2,0.4,-1.5,1.5]);
k=500;
num=[1,10];
den=conv([1,0],conv([1,1],conv([1,20],[h,50])));
w=logspace(-1,3,200)
bode(k*num,den,w);
grid;
五、实验原始数据记录与数据处理
六、实验结果与分析讨论
范围是自动确定的。当需要指定幅值范围和相角范围时,则需用下面的功能指令:
[mag,phase,w]=bode(num,den,w)
四、实验内容及步骤
z=[]:
p=[0,-1,-2]:
k=5;
g=zpk(z,p,k):
nyquist(g);
w=0.5:0.1:10:
figure(2):
nyquist(g:w);
《自动控制原理》Matlab求解控制系统时域响应实验一
《自动控制原理》Matlab求解控制系统时域响应实验一、实验目的(1)学习控制系统在阶跃信号、脉冲信号、速度函数、加速度函数等不同输入信号下的响应(2)通过计算机的仿真图形观测二阶控制系统的时域响应曲线。
(3)改变ξ和ωn,观测参数变化时对典型环节时域响应的影响。
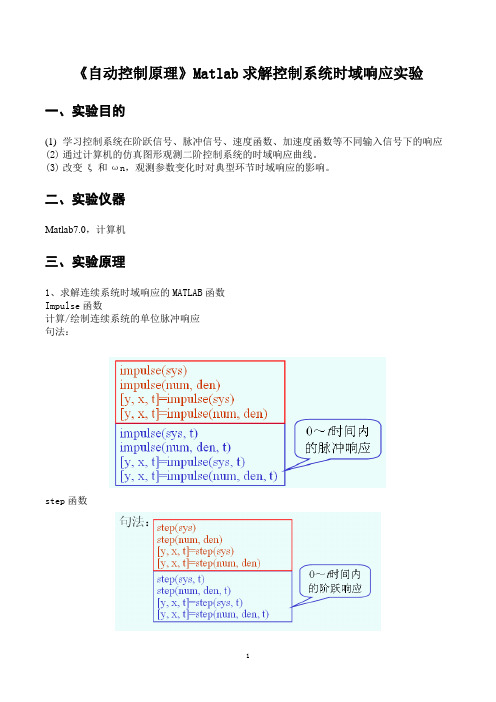
二、实验仪器Matlab7.0,计算机三、实验原理1、求解连续系统时域响应的MATLAB函数Impulse函数计算/绘制连续系统的单位脉冲响应句法:step函数lsim函数计算/绘制连续系统在0~t时间内的对任意输入u的响应。
上述函数句法中带输出变量引用时,得到系统的时域响应数据而不直接显示响应曲线,此时需通过绘图命令plot查看响应曲线。
四、实验内容及步骤(分析:无阻尼固有频率一定,阻尼比越小,系统超调量越大,振荡越厉害)五、实验原始数据记录与数据处理当ζ=0.7,ωn取2、4、6、8、10、12时的单位阶跃响应曲线。
六、实验结果与分析讨论无阻尼固有频率一定,阻尼比越小,系统超调量越大,振荡越厉害。
阻尼比一定,无阻尼固有频率越大,系统能更快达到稳定值,响应的快速性越好七、结论控制系统在阶跃信号、脉冲信号、速度函数、加速度函数等不同输入信号下的响应不同,无阻尼固有频率一定,阻尼比越小,系统超调量越大,振荡越厉害。
阻尼比一定,无阻尼固有频率越大,系统能更快达到稳定值,响应的快速性越好。
八、实验心得体会(可略)通过这次实验我学到了很多,首先是对单位脉冲响应,单位加速度响应,单位速度响应,单位阶跃响应有了一定的认知,对matlab软件有了更深的认识,会使用的功能越来越多了,希望在今后的学习生涯中能学到更多的知识。
自动控制 Matlab仿真实验一
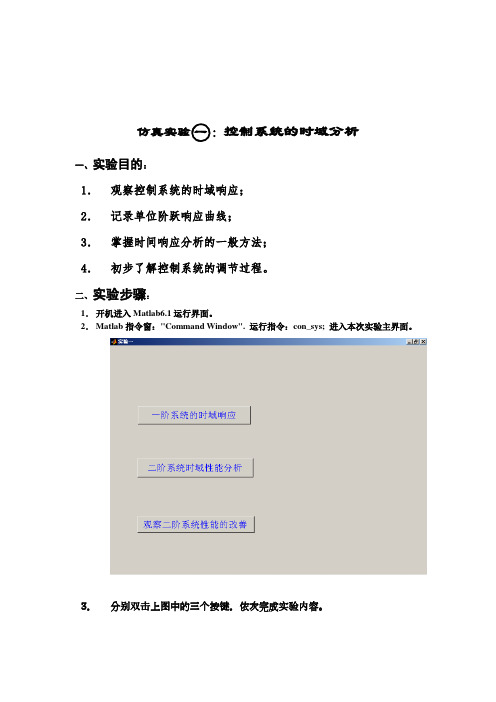
仿真实验○一:控制系统的时域分析一、实验目的:1.观察控制系统的时域响应;2.记录单位阶跃响应曲线;3.掌握时间响应分析的一般方法;4.初步了解控制系统的调节过程。
二、实验步骤:1.开机进入Matlab6.1运行界面。
2.Matlab指令窗:"Command Window". 运行指令:con_sys; 进入本次实验主界面。
3.分别双击上图中的三个按键,依次完成实验内容。
4.本次实验的相关Matlab函数:tf([num],[den])可输入一传递函数。
step(G,t)在时间范围t秒内,画出阶跃响应图。
三、实验内容:1、观察一阶系统G=1/(T+s) 的时域响应:取不同的时间常数T,分别观察该系统的脉冲响应、阶跃响应、斜坡响应以及单位加速度响应。
结论:时间常数越小,响应越迅速。
2、二阶系统的时域性能分析:(1)调节时间滑块,使阶跃响应最终出现稳定值。
(2)结合系统的零极点图,观察自然频率与阻尼比对极点位置的影响。
(3)结合时域响应图,观察自然频率与阻尼比对阶跃响应的影响。
结论:阻尼比越小,极点越靠近虚轴,超调量减小,但响应速度变慢。
自然频率减小,极点靠近虚轴,响应速度减小,超调几乎不变。
(4)调节自然频率与阻尼比,要求:Tr<0.56s ,Tp<1.29s,Ts<5.46,超调不大于5%.记录下满足上述要求的自然频率与阻尼比。
调节完成之后的响应曲线如图。
此时自然频率为14.5872rad/sec,阻尼比为0.77456。
各项参数完全满足要求。
3、结合《自动控制原理》一书,Page 135,题3_10. 分别观察比例_微分与测速反馈对二阶系统性能的改善。
(1).按原始的调节参数输入,调节时间滑块,使阶跃响应最终出现稳定值。
(2)采用不同的G输入,观察各项性能指数。
结论:增大分母中间的参数,相当于增大系统阻尼比,从而减小超调量(3).分别取不同的K3,观察比例_微分控制对系统性能的改善。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
结果分析:在 k<53.6364 时,系统是稳定的。
(6)在 SIMULINK 中建立如图所示的数学模型,绘制其单位阶跃响应曲线,开环及闭环伯德图。
1 0.002s+1 电流环滤波
0.072 电流反馈系数 70 s 传动装置 传递函数 Scope
1 Step 0.01s+1 转速环给定平衡滤波
0.0867s+1 0.0164s
试验结果:
(3) 系统结构图如下所示,画出 nyquist 频率曲线和伯德图,判断系统的稳定性。 R(s) + _ 10 + _ G(s) C(s)
其中 G ( s )
16.7 s (0.85s 1)(0.25s 1)(0.0625s 1)
源程序:%3
k=10; G=tf([16.7,0],[conv(conv([0.85,1],[0.25,1]),[0.0625,1])]); G_a=feedback(G,-1); subplot(311) nyquist(k*G_a) subplot(312) bode(k*G_a) subplot(313) pzmap(k*G_a)
rlocus(G); grid [k,p]=rlocfind(G)
试验结果:
selected_point = -19.9052 - 0.6211i k = 9.6031 p = -107.7221 -22.1989 -20.0791
结果分析:即产生重实根时,k=9.6031.
(5)某开环系统传递函数为: Go ( s )
1. 实验的基本原理
控制系统的模拟实验是采用复合网络法来模拟各种典型环节, 即利用运算放大器和 RC 组成的不同 输入网络和反馈网络组合, 模拟出各种典型环节, 然后按照给定系统的结构图将这些模拟环节连接起来, 便得到了相应的模拟系统。然后将输入信号加到模拟系统的输入端,使系统产生动态响应。这时,可利 用计算机或示波器等测试仪器,测量系统的输出,便可观测到系统的动态响应过程,并进行性能指标的 测量。若改变系统的某一参数,还可进一步分析研究参数对系统性能的影响。
实验一 MATLAB 的基本应用
1、试验目的
熟悉 matlab 的基本知识,会利用其与控制系统有关的函数分析和设计控制系统。
2、实验内容
(1)系统模型如下所示,判断系统的稳定性,以及系统是否为最小相位系统。
G (s)
3s 3 16 s 2 41s 28 s 6 14s 5 110s 4 528s 3 1494s 2 2117 s 112
den=[0.1,0]; G=tf(num,den); grid step(G)
试验结果:
(3)微分环节令 R2 = 100K ,C1 =1μf ,C2 =0.01μf ,
源程序:%3
k=-1; num=[0.1,0]; den=[0.001,1]; G=tf(num,den); grid step(k*G)
实验结果:
timetopeak = 1.5682 percentovershoot = 99.9658 setllingtime = 6.9545
源程序:5-2 %1.2
num=[0,0,100]; den=[1,5,100]; G=tf(num,den); grid step(G) t=0:0.1:2.5; [y,t]=step(G); [Y,k]=max(y); timetopeak=t(k) C=dcgain(G); [Y,k]=max(y); percentovershoot=100*(Y-C)/C i=length(t);
Grand total is 3458 elements using 30206 bytes >> plot(tout,yout)
试验结果:单位阶跃响应
闭环伯德图: 修改原理图
[a,b,c,d]=linmod('tu6bihuan') sys=ss(a,b,c,d); >> bode(sys) >> [a,b,c,d]=linmod('tu6'); >> sys=ss(a,b,c,d); >> bode(sys) >> margin(sys)
2、实验要求
1)根据每一个原理图,写出其传递函数; 2)画出每一种典型环节的阶跃响应曲线; 3)讨论振荡环节(二阶系统):按实验给出的欠阻尼下的响应曲线,求出tp 和ts ,与理论值相比较, 讨论振荡环节性能指标与ζ,ωn 的关系。 时域性能指标测量方法: (1)最大超调量σ% :利用输出波形,读出响应最大值和稳态值所具有的刻度值。 (2)峰值时间tp :根据输出的波形最大值,找出这一点在水平方向上所具有的刻度值。 (3)调节时间 ts :读出水平方向上对应输出从零到进入 5%或 2%误差带时所占的刻度值
源程序:%1
num=[3,16,41,28]; den=[1,14,110,528,1494,2117,112]; subplot(211) nyquist(num,den) subplot(212) pzmap(num,den)
实验结果:
结果分析:由根轨迹图知,系统稳定,由零极点图知,系统是最小相位系统。
3、实验内容
(1)比例环节,其中取 R1 = 100K , R2 = 200K ,
源程序:%1
k=-2; num=[1]; den=[1]; G=tf(num,den); grid step(k*G)
试验结果:
(2)积分环节,取 R1 =100K , C= 1μf ,
源程序:%2
num=-1*[0,1];
试验结果:
(4)惯性环节取 R1 =100K R2 =200K , C = 1μf ,
源程序:%4
k=-2; num=[0,1]; den=[0.2,1]; G=tf(num,den); grid step(k*G)
试验结果:
(5)振荡环节,
源程序:5-1
%1.1 num=[0,0,100]; den=[1,0,100]; G=tf(num,den); grid step(G) t=0:0.1:2.5; [y,t]=step(G); [Y,k]=max(y); timetopeak=t(k) C=dcgain(G); [Y,k]=max(y); percentovershoot=100*(Y-C)/C i=length(t); while(y(i)>0.98*C)&(y(i)<1.02*C) i=i-1; end setllingtime=t(i)
k ( s 2) 要求绘制系统的闭环根轨迹,分析其稳定 ( s 4 s 3) 2
2
性,并绘制出当 k=55 和 k=56 时系统的闭环冲激响应。
源程序:%5
G=tf([1,2],[conv([1,4,3],[1,4,3])]); rlocus(G); grid [k,p]=rlocfind(G) k=55; Gk=feedback(k*G,1);
(2)已知某闭环系统的传递函数为: G ( s )
10 s 25 ,求其单位阶跃响应曲 0.16 s 1.96 s 2 10 s 25
3
线,单位脉冲响应曲线,以及输入信号为 r (t ) 1 t 的响应曲线。
源程序:%2
num=[10,25]; den=[0.16,1.96,10,25]; subplot(3,1,1) impulse(num,den,'r') title('Impulse Response'); subplot(3,1,2) step(num,den) title('Step Response'); t=[0:0.01:2] u=1+t; subplot(3,1,3) lsim(num,den,u,t)
while(y(i)>0.98*C)&(y(i)<1.02*C) i=i-1; end setllingtime=t(i) 试验结果:
timetopeak = 0.3212 percentovershoot = 44.4114 setllingtime = 1.4055
源程序: 5-3 %1.3
num=[0,0,100]; den=[1,10,100]; G=tf(num,den); grid step(G) t=0:0.1:2.5; [y,t]=step(G); [Y,k]=max(y); timetopeak=t(k) C=dcgain(G); [Y,k]=max(y); percentovershoot=100*(Y-C)/C i=length(t); while(y(i)>0.98*C)&(y(i)<1.02*C) i=i-1; end setllingtime=t(i)
试验结果:
结果分析:由伯德图、相角图及零极点图可知 z 不等于 0,所以系统是不稳定的。
(4)已知某单位反馈系统的开环传递函数为: G ( s )
k 要求:绘制系统的 s (0.01s 1)( 0.02 s 1)
闭环根轨迹,并确定使系统产生重实根和纯虚根的开环增益 k。
源程序:%4
G=tf(1,[conv([0.01,1],[0.02,1]),0]);
实验模型如图所示:
实验过程:
whos Name Size Bytes Class
G k n p tout yout
1x1 1x1 1x1 3x1 1000x1 1000x1
2206 8 11968 24 8000 8000
tf object double array struct array double array double array double array
试验结果: