自动控制原理MATLAB仿真实验报告
自控仿真实验报告
一、实验目的1. 熟悉MATLAB/Simulink仿真软件的基本操作。
2. 学习控制系统模型的建立与仿真方法。
3. 通过仿真分析,验证理论知识,加深对自动控制原理的理解。
4. 掌握控制系统性能指标的计算方法。
二、实验内容本次实验主要分为两个部分:线性连续控制系统仿真和非线性环节控制系统仿真。
1. 线性连续控制系统仿真(1)系统模型建立根据题目要求,我们建立了两个线性连续控制系统的模型。
第一个系统为典型的二阶系统,其开环传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)} \]第二个系统为具有迟滞环节的系统,其开环传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)(s+3)} \](2)仿真与分析(a)阶跃响应仿真我们对两个系统分别进行了阶跃响应仿真,并记录了仿真结果。
(b)频率响应仿真我们对两个系统分别进行了频率响应仿真,并记录了仿真结果。
(3)性能指标计算根据仿真结果,我们计算了两个系统的性能指标,包括上升时间、超调量、调节时间等。
2. 非线性环节控制系统仿真(1)系统模型建立根据题目要求,我们建立了一个具有饱和死区特性的非线性环节控制系统模型。
其传递函数为:\[ W_k(s) = \begin{cases}1 & |s| < 1 \\0 & |s| \geq 1\end{cases} \](2)仿真与分析(a)阶跃响应仿真我们对非线性环节控制系统进行了阶跃响应仿真,并记录了仿真结果。
(b)相轨迹曲线绘制根据仿真结果,我们绘制了四条相轨迹曲线,以分析非线性环节对系统性能的影响。
三、实验结果与分析1. 线性连续控制系统仿真(a)阶跃响应仿真结果表明,两个系统的性能指标均满足设计要求。
(b)频率响应仿真结果表明,两个系统的幅频特性和相频特性均符合预期。
2. 非线性环节控制系统仿真(a)阶跃响应仿真结果表明,非线性环节对系统的性能产生了一定的影响,导致系统响应时间延长。
(最新版)自动控制原理MATLAB仿真实验报告
实验一 MATLAB及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;二、预习要点1、系统的典型响应有哪些?2、如何判断系统稳定性?3、系统的动态性能指标有哪些?三、实验方法(一)四种典型响应1、阶跃响应:阶跃响应常用格式:1、;其中可以为连续系统,也可为离散系统。
2、;表示时间范围0---Tn。
3、;表示时间范围向量T指定。
4、;可详细了解某段时间的输入、输出情况。
2、脉冲响应:脉冲函数在数学上的精确定义:其拉氏变换为:所以脉冲响应即为传函的反拉氏变换。
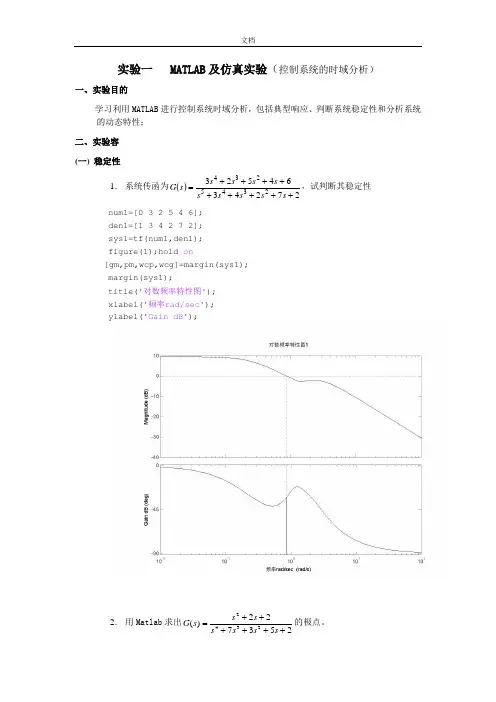
脉冲响应函数常用格式:①;②③(二)分析系统稳定性有以下三种方法:1、利用pzmap绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den) 运行结果: p =-1.7680 + 1.2673i -1.7680 - 1.2673i 0.4176 + 1.1130i 0.4176 - 1.1130i -0.2991P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
自动控制原理 matlab实验报告
自动控制原理实验(二)一、实验名称:基于MATLAB的控制系统频域及根轨迹分析二、实验目的:(1)、了解频率特性的测试原理及方法;(2)、理解如何用MATLAB对根轨迹和频率特性进行仿真和分析;(3)、掌握控制系统的根轨迹和频率特性两大分析和设计方法。
三、实验要求:(1)、观察给定传递函数的根轨迹图和频率特性曲线;(2)、分析同一传递函数形式,当K值不同时,系统闭环极点和单位阶跃响应的变化情况;(3)、K值的大小对系统的稳定性和稳态误差的影响;(4)、分析增加系统开环零点或极点对系统的根轨迹和性能的影响。
四、实验内容及步骤(1)、实验指导书:实验四(1)、“rlocus”命令来计算及绘制根轨迹。
会出根轨迹后,可以交互地使用“rlocfind”命令来确定点击鼠标所选择的根轨迹上任意点所对应的K值,K值所对应的所有闭环极点值也可以使用形如“[K, PCL] = rlocfind(G1)”命令来显示。
(2)、波特图:bode(G1, omga)另外,bode图还可以通过下列指令得出相位和裕角:[mag,phase,w] = bode(sys)(3)、奈奎斯特图:nuquist(G, omega)(2)课本:例4-1、4-2、4-7五实验报告要求(1)、实验指导书:实验四思考题请绘制下述传递函数的bode图和nyquist图。
1. 根据实验所测数据分别作出相应的幅频和相频特性曲线;2. 将思考题的解题过程(含源程序)写在实验报告中。
幅频特性曲线相频特性曲线Gs = zpk([10], [-5; -16; 9], 200)subplot(1, 2, 1)bode(Gs)gridsubplot(1, 2, 2)nyquist(Gs)grid(2)课本:例4-1、4-2、4-7图像结果:程序:Gs = zpk([-1], [0; -2; -3],1) rlocus(Gs)图像结果:程序:Gs = zpk([-2], [-1-j; -1+j],1) rlocus(Gs)程序:K=[0.5 1 2]for i=1:1:3num=[1,1,0,0]; den=[1,1,K(i)]; sys=tf(num,den); rlocus(sys); hold ongrid onend图像结果:目标:改变增益K和转折频率依次调节源程序:k1=[4.44,10,20];num=[1,2];den=conv([1,1],[1,2,4]);%一阶转折频率 1/T(wn1=2,wn2=1)二阶转折频率 wn3=wn'=2,伊布西塔=1/2 num1=[1,1];den1=conv([1,2],[1,2,4]);%一阶转折频率 1/T(wn1=1,wn2=2)二阶转折频率 wn3=wn'=2,伊布西塔=1/2 t=[0:0.1:7]; %for i=1:3g0=tf(k1(i)*num,den);g=feedback(g0,1);[y,x]=step(g,t);c(:,i)=y;g1=tf(k1(i)*num1,den1);g(1)=feedback(g1,1);[y1,x]=step(g(1),t);c1(:,i)=y1;endplot(t,c(:,1),'-',t,c(:,2),'-',t,c(:,3),'-',t,c1(:,1),'-',t,c1(:,2), '-',t,c1(:,3),'-');gridxlabel('Time/sec'),ylabel('out')结果分析:在本题中(1)改变k值:k值越大,超调量越大,调节时间越长,峰值时间越短,稳态误差越小(2)改变转折频率:超调量,调节时间,峰值时间,稳态误差同样有相应的变化。
自动控制原理MATLAB仿真实验报告
实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些2、 如何判断系统稳定性3、 系统的动态性能指标有哪些 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y =(二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果: p =+ - + -P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
自动控制原理MATLAB仿真实验(于海春)
自动控制原理MATLAB仿真实验(于海春)实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK 的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入imulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个imulink仿真环境常规模板。
图1-1SIMULINK仿真界面图1-2系统方框图3.在imulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击imulink下的“Continuou”,再将右边窗口中“TranferFen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在imulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的imulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击imulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
5)选择输出方式。
自动控制原理MATLAB仿真实验一(控制系统地时域分析报告)
实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;二、实验容(一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性num1=[0 3 2 5 4 6];den1=[1 3 4 2 7 2];sys1=tf(num1,den1);figure(1);hold on[gm,pm,wcp,wcg]=margin(sys1);margin(sys1);title('对数频率特性图');xlabel('频率rad/sec');ylabel('Gain dB');2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
a=[0 0 1 2 2];b=[1 7 3 5 2];[z,p,k]=tf2zpk(a,b) ;(二)阶跃响应1. 二阶系统()102102++=s s s G1)键入程序,观察并记录单位阶跃响应曲线num1=[10];den1=[1 2 10];step(num1,den1);grid on ;2)计算系统的闭环根、阻尼比、无阻尼振荡频率,并记录 wn=sqrt(10);%自然振荡频率zunibi=2/wn;%阻尼比syms s ;S=solve(s^2+2*s+10);%求闭环根3)修改参数,分别实现1=ζ和2=ζ的响应曲线,并记录 n0=10;d0=[1 2 10]; step(n0,d0);%原响应曲线hold on ;n1=10;d1=[1 6.32 10];step(n1,d1);n2=10;d2=[1 12.64 10];step(n2,d2);4)修改参数,分别写出程序实现0121w w n =和022w w n =的响应曲线,并记录 n0=10;d0=[1 2 10];step(n0,d0);%原响应曲线hold on ;n1=2.5;d1=[1 1 2.5];step(n1,d1);n2=40;d2=[1 4 40];step(n2,d2);2. 作出以下系统的阶跃响应,并分析结果 (1)()10210221+++=s s s s G (2)()102105.0222++++=s s s s s G (3)()1025.0222+++=s s s s s G (4)()10222++=s s ss Gn0=[2 10];d0=[1 2 10];step(n0,d0);hold on ;n1=[1 0.5 10];d1=[1 2 10];step(n1,d1);hold on ;n2=[1 0.5 0];d2=[1 2 10];step(n2,d2);hold on ;n3=[1 0];d3=[1 2 10]; step(n3,d3);3. 25425)()(2++=s s s R s C 求该系统单位阶跃响应曲线,并在所得图形上加网格线和标题 num0=[25];den0=[1 4 25]; step(num0,den0); grid on ;xlabel('X'); ylabel('Y ');title('单位阶跃曲线');(三)系统动态特性分析 用Matlab 求二阶系统12012120)(2++=s s s G 和01.0002.001.0)(2++=s s s G 的峰值时间p t ,上升时间r t ,调整时间s t ,超调量%σ。
《自动控制原理》仿真实验报告
中国地质大学江城学院《自动控制原理》仿真实验报告姓名吴丽芳班级数控(2)班学号2520110228指导教师祁锋2013年12月9 日目录实验一 MATLAB软件的安装与认知实验二使用软件进行数值运算和绘图实验三采用SIMULINK仿真模块进行系统性能分析实验一 MATLAB软件的认识一、实验目的MATLAB软件是具有数值分析、矩阵运算、复杂的信息处理和完美的图形显示等多种功能的软件包,它具有许多专门用途的工具箱,进一步扩展了MATLAB 的应用领域,使其在自动控制系统的分析和设计方面获得广泛的应用。
1、熟悉启动和退出MATLAB软件的方法;2、熟悉MATLAB软件的运行环境;3、熟悉MATLAB软件的基本操作;4、掌握建立矩阵的方法;5、掌握熟悉MATLAB软件各种表达式的书写规则以及常用函数的使用;6、能够进行基本的数组、矩阵运算。
二、实验内容熟悉MATLAB软件的各个工具箱、指令及常用工具,掌握数值的表示方法、运算符的使用规则及运算表达式的写法。
三、分析讨论题1、MATLAB软件有哪些常用指令?有哪些专用工具箱?help elfun %列出所有基本函数。
lookfor image 查找有关图像的函数和命令。
几个常用的通用命令。
quit 关闭MATLABexit 关闭MATLABclc 清除MATLAB命令窗口中的所有显示内容clear 清除工作空间中保存的所有变量Matlab Main Toolbox——matlab主工具箱Control System Toolbox——控制系统工具箱Communication Toolbox——通讯工具箱Financial Toolbox——财政金融工具箱System Identification Toolbox——系统辨识工具箱Fuzzy Logic Toolbox——模糊逻辑工具箱Neural Network Toolbox——神经网络工具箱Optimization Toolbox——优化工具箱Partial Differential Toolbox——偏微分方程工具箱Robust Control Toolbox——鲁棒控制工具箱Signal Processing Toolbox——信号处理工具箱Spline Toolbox——样条工具箱Statistics Toolbox——统计工具箱Symbolic Math Toolbox——符号数学工具箱Simulink Toolbox——动态仿真工具箱Wavele Toolbox——小波工具箱2、用举例的方法说明数值的表示方法是怎样的?MATLAB的数值采用十进制,可以带小数点或负号。
《自动控制原理》MATLAB分析与设计仿真实验报告
一、仿真实验内容及要求 ............................................................................................................... 0 二、仿真实验时间安排及相关事宜 .. 0《自动控制原理》MATLAB 分析与设计仿真实验任务书(2013)一、仿真实验内容及要求1.MATLAB 软件要求学生通过课余时间自学掌握MA TLAB 软件的基本数值运算、基本符号运算、基本程序设计方法及常用的图形命令操作;熟悉MA TLAB 仿真集成环境Simulink 的使用。
2.各章节实验内容及要求1)第三章 线性系统的时域分析法∙ 对教材P136.3-5系统进行动态性能仿真,并与忽略闭环零点的系统动态性能进行比较,分析仿真结果;∙ 对教材P136.3-9系统的动态性能及稳态性能通过的仿真进行分析,说明不同控制器的作用;∙ 在MATLAB 环境下完成英文讲义P153.E3.3。
∙ 对英文讲义中的循序渐进实例“Disk Drive Read System”,在100=a K 时,试采用微分反馈使系统性能满足%5%,σ<3250,510s ss t ms d -≤<⨯等设计指标。
2)第四章 线性系统的根轨迹法∙ 在MATLAB 环境下完成英文讲义P157.E4.5; ∙ 利用MA TLAB 绘制教材P181.4-5-(3);∙ 在MATLAB 环境下选择完成教材第四章习题4-10或4-18,并对结果进行分析。
3)第五章 线性系统的频域分析法利用MATLAB 绘制本章作业中任意2个习题的频域特性曲线; 4)第六章 线性系统的校正∙ 利用MATLAB 选择设计本章作业中至少2个习题的控制器,并利用系统的单位阶跃响应说明所设计控制器的功能。
∙ 对英文讲义中的循序渐进实例“Disk Drive Read System”,试采用PD 控制使系统的性能满足给定的设计指标ms t s 150%,5%<<σ。
自动控制原理MATLAB分析与设计仿真实验报告(最终版)
兰州理工大学《自动控制原理》MATLAB分析与设计仿真实验报告学院:电气工程与信息工程学院专业班级: 13级自动化3班姓名:学号:时间: 2015年12月Step ResponseTime (seconds)A m p l i t u d e1234567891000.511.5System: sys1Rise time (seconds): 1.17System: sys1P eak amplitude: 1.41Overshoot (%): 40.6At time (seconds): 2.86System: sys1Final value: 1第三章 线性系统的时域分析法一、教材第三章习题3.5设单位反馈系统的开环传递函数为G(s)=0.41(0.6)s s s ++(1)试求系统在单位阶跃输入下的动态性能。
(2)忽略闭环零点的系统在单位阶跃输入下的动态性能。
(3)对(1) 和(2)的动态性能进行比较并分析仿真结果。
(1)A :程序如下。
B :系统响应曲线如下图。
Step Response Time (seconds)A m p l i t u d e01234567891000.20.40.60.811.21.4System: sys1Final value: 1System: sys1Settling time (seconds): 8.08System: sys1P eak amplitude: 1.16Overshoot (%): 16.3At time (seconds): 3.63System: sys1Rise time (seconds): 1.64(2)A :程序如下。
B :系统响应曲线如下图。
(3) A :程序如下。
B 响应曲线如下图。
阶跃响应t (sec)c (t )0123456789100.20.40.60.811.21.4System: sysRise Time (sec): 1.46System: sys1Rise Time (sec): 1.64System: sys1P eak amplitude: 1.16Overshoot (%): 16.3At time (sec): 3.63System: sys P eak amplitude: 1.18Overshoot (%): 18At time (sec): 3.16System: sys1Final Value: 1System: sys1Settling Time (sec): 8.08System: sysSettling Time (sec): 7.74120,0.1ττ==120.1,0ττ==分析:忽略闭环零点时,系统的峰值时间,调节时间,上升时间均为增大的,而超调量减小。
自动控制原理MATLAB仿真实验报告
实验一 典型环节的MATLAB 仿真 一、实验目的1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、实验内容① 比例环节1)(1=s G 和2)(1=s G ;Simulink 图形实现:示波器显示结果:② 惯性环节11)(1+=s s G 和15.01)(2+=s s GSimulink 图形实现:示波器显示结果:③ 积分环节s s G 1)(1Simulink 图形实现:示波器显示结果:④ 微分环节s s G )(1Simulink 图形实现:波器显示结果:⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G1)、G1(s )=s+2Simulink 图形实现:示波器显示结果:2)、G2(s)=s+1 Simulink图形实现:示波器显示结果:⑥ 比例+积分环节(PI )s s G 11)(1+=和s s G 211)(2+=1)、G1(1)=1+1/sSimulink 图形实现:示波器显示结果:2)G2(s)=1+1/2s Simulink图形实现:示波器显示结果:三、心得体会通过这次实验我学到了很多,对课本内容加深了理解,熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法,加深对各典型环节响应曲线的理解,这为对课程的学习打下了一定基础。
实验二线性系统时域响应分析一、实验目的1.熟练掌握step( )函数和impulse( )函数的使用方法,研究线性系统在单位阶跃、单位脉冲及单位斜坡函数作用下的响应。
2.通过响应曲线观测特征参量ζ和nω对二阶系统性能的影响。
3.熟练掌握系统的稳定性的判断方法。
二、实验内容1.观察函数step( )的调用格式,假设系统的传递函数模型为243237()4641s s G s s s s s ++=++++绘制出系统的阶跃响应曲线?2.对典型二阶系统222()2n n n G s s s ωζωω=++1)分别绘出2(/)n rad s ω=,ζ分别取0,0.25,0.5,1.0和2.0时的单位阶跃响应曲线,分析参数ζ对系统的影响,并计算ζ=0.25时的时域性能指标,,,,p r p s ss t t t e σ。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;二、预习要点1、 系统的典型响应有哪些?2、 如何判断系统稳定性?3、 系统的动态性能指标有哪些?三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f 其拉氏变换为:)()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ;② );,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y =(二) 分析系统稳定性有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点(三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容(一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果:p =+-+-图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
%求取极点num=[1 2 2];den=[1 7 3 5 2];p=roots(den)运行结果:p =+-故253722)(2342++++++=s s s s s s s G 的极点s1= , s2= + , s3= - , s4=(二)阶跃响应1. 二阶系统()102102++=s s s G1)键入程序,观察并记录单位阶跃响应曲线2)计算系统的闭环根、阻尼比、无阻尼振荡频率,并记录3)记录实际测取的峰值大小、峰值时间及过渡过程时间,并填表:由图1-3及其相关理论知识可填下表:3//πωπ==d p t =4)修改参数,分别实现1=ζ和2=ζ的响应曲线,并记录5)修改参数,分别写出程序实现0121w w n =和022w w n =的响应曲线,并记录%单位阶跃响应曲线num=[10];den=[1 2 10];step(num,den);title('Step Response of G(s)=10/(s^2+2s+10)');图1-2 二阶系统()102102++=s s s G 单位阶跃响应曲线%计算系统的闭环根、阻尼比、无阻尼振荡频率num=[10];den=[1 2 10];G=tf(num,den);[wn,z,p]=damp(G)运行结果:wn =z =p =+-由上面的计算结果得系统的闭环根s= -1±3i ,阻尼比=ς3162.0、无阻尼振荡频率1623.3=n ω图1-3 ()102102++=s s s G 单位阶跃响应曲线(附峰值等参数)第4)题:%kosi=1阶跃响应曲线wn=sqrt(10);kosi=1;G=tf([wn*wn],[1 2*kosi*wn wn*wn]);step(G);title('Step Response of kosi=1');%kosi=2的阶跃响应曲线wn=sqrt(10);kosi=2;G=tf([wn*wn],[1 2*kosi*wn wn*wn]);step(G);title('Step Response of kosi=2');当wn 不变时,由1=ζ和2=ζ的响应曲线可归纳:①平稳性,由曲线看出,阻尼系数ζ ↑,超调量↓,响应的振荡↓,平稳性好;反之, ζ ↓,振荡↑,平稳性差。
②快速性,ζ↑,t s ↑,快速性差;反之, ζ ↓, t s ↓;但ζ过小,系统响应的起始速度较快,但振荡强烈,影响系统稳定。
第5)题:%wn1=的阶跃响应曲线w0=sqrt(10);kosi=1/sqrt(10);wn1=*w0;G=tf([wn1*wn1],[1 2*kosi*wn1 wn1*wn1]);step(G);title('Step Response of wn1=');图1-6 wn1=的阶跃响应曲线%wn2=2w0的阶跃响应曲线w0=sqrt(10);kosi=1/sqrt(10);wn2=2*w0;G=tf([wn2*wn2],[1 2*kosi*wn2 wn2*wn2]);step(G);title('Step Response of wn2=2w0');图1-7 wn2=2w0的阶跃响应曲线由图1-6和图1-7得:当ζ一定时,ωn ↑,t s ↓,所以当ζ一定时,ωn 越大,快速性越好。
2. 作出以下系统的阶跃响应,并与原系统响应曲线进行比较,作出相应的实验分析结果(1)()10210221+++=s s s s G ,有系统零点的情况 (2)()102105.0222++++=s s s s s G ,分子、分母多项式阶数相等(3)()1025.0222+++=s s s s s G ,分子多项式零次项为零 (4)()10222++=s s ss G ,原响应的微分,微分系数为1/10%各系统阶跃响应曲线比较G0=tf([10],[1 2 10]);G1=tf([2 10],[1 2 10]);G2=tf([1 10],[1 2 10]);G3=tf([1 0],[1 2 10]);G4=tf([1 0 ],[1 2 10]);step(G0,G1,G2,G3,G4);grid on;title('实验 Step Response 曲线比较');图1-8 各系统的阶跃响应曲线比较3. 单位阶跃响应:25425)()(2++=s s s R s C 求该系统单位阶跃响应曲线,并在所得图形上加网格线和标题%单位阶跃响应G=tf([25],[1 4 25]);step(G);grid on;title('实验 Step Response of G(s)=25/(s^2+4s+25)');图1-9 25425)()(2++=s s s R s C 阶跃响应曲线(三)系统动态特性分析用Matlab 求二阶系统12012120)(2++=s s s G 和01.0002.001.0)(2++=s s s G 的峰值时间p t 上升时间r t 调整时间s t 超调量%σ。
%G1阶跃响应G1=tf([120],[1 12 120]);step(G1);grid on;title(' Step Response of G1(s)=120/(s^2+12s+120)');图1-10 12012120)(2++=s s s G 阶跃响应曲线 由图知p t =,r t =,s t = ,超调量%σ=%% G2单位阶跃响应G2=tf([],[1 ]);step(G2);grid on;title(' Step Response of G2(s)=(s^2++');图1-11 01.0002.001.0)(2++=s s s G 阶跃响应曲线实验二 MATLAB 及仿真实验(控制系统的根轨迹分析)一 实验目的1.利用计算机完成控制系统的根轨迹作图2.了解控制系统根轨迹图的一般规律3.利用根轨迹图进行系统分析二 预习要点1. 预习什么是系统根轨迹?2. 闭环系统根轨迹绘制规则。
三 实验方法(一) 方法:当系统中的开环增益k 从0到变化时,闭环特征方程的根在复平面上的一组曲线为根轨迹。
设系统的开环传函为:)()()(0s Q s N k s G =,则系统的闭环特征方程为:0)()(1)(10=+=+s Q s N k s G 根轨迹即是描述上面方程的根,随k 变化在复平面的分布。
(二) MATLAB 画根轨迹的函数常用格式:利用Matlab 绘制控制系统的根轨迹主要用pzmap ,rlocus ,rlocfind ,sgrid 函数。
1、零极点图绘制[p,z]=pzmap(a,b,c,d):返回状态空间描述系统的极点矢量和零点矢量,而不在屏幕上绘制出零极点图。
[p,z]=pzmap(num,den):返回传递函数描述系统的极点矢量和零点矢量,而不在屏幕上绘制出零极点图。
pzmap(a,b,c,d)或pzmap(num,den):不带输出参数项,则直接在s 复平面上绘制出系统对应的零极点位置,极点用×表示,零点用o 表示。
pzmap(p,z):根据系统已知的零极点列向量或行向量直接在s 复平面上绘制出对应的零极点位置,极点用×表示,零点用o 表示。
2、根轨迹图绘制rlocus(a,b,c,d)或者rlocus(num,den):根据SISO 开环系统的状态空间描述模型和传递函数模型,直接在屏幕上绘制出系统的根轨迹图。
开环增益的值从零到无穷大变化。
rlocus(a,b,c,d,k)或rlocus(num,den,k): 通过指定开环增益k 的变化范围来绘制系统的根轨迹图。
r=rlocus(num,den,k) 或者[r,k]=rlocus(num,den) :不在屏幕上直接绘出系统的根轨迹图,而根据开环增益变化矢量k ,返回闭环系统特征方程1+k*num(s)/den(s)=0的根r ,它有length(k)行,length(den)-1列,每行对应某个k 值时的所有闭环极点。
或者同时返回k 与r 。
若给出传递函数描述系统的分子项num 为负,则利用rlocus 函数绘制的是系统的零度根轨迹。
(正反馈系统或非最小相位系统)3、rlocfind()函数[k,p]=rlocfind(a,b,c,d)或者[k,p]=rlocfind(num,den)它要求在屏幕上先已经绘制好有关的根轨迹图。