简易单轴运动控制器使用说明书
运动控制操作说明
运动控制操作说明
运动控制操作说明
1.引言
本文档旨在提供运动控制操作的详细说明,以确保使用者能够正确地操作运动控制设备,并充分了解其中的操作细节和安全注意事项。
2.设备概述
2.1 设备名称:运动控制设备
2.2 设备功能:实现对运动控制的精确控制和调整
3.准备工作
3.1 安装设备:按照设备说明书进行正确的安装
3.2 连接设备:将设备正确连接至相应的电源和控制接口
3.3 配置参数:根据实际需求,调整设备的控制参数
4.运动控制操作步骤
4.1 打开设备电源:确保设备处于正常工作状态
4.2 启动控制软件:双击控制软件图标,进入控制界面
4.3 设定目标位置:根据所需的运动路径,设定目标位置参数
4.4 设定运动速度:根据实际需求,设定运动速度参数
4.5 开始运动:运动控制软件界面上的“启动”按钮,开始运动控制操作
5.运动控制操作注意事项
5.1 操作人员应该经过相关培训,了解设备操作流程和安全操作规程
5.2 在进行运动控制操作前,应仔细检查设备的连接是否牢固,防止因松脱造成意外伤害
5.3 在进行高速运动控制时,应注意周围人员的安全,确保安全间隔距离
5.4 遵循设备操作手册中所提供的操作指南,并按照要求进行操作
5.5 若设备出现异常情况,应立即停止运动并通知相关维修人员进行处理
6.附件
本文档附带以下附件(附件的名称,并说明各个附件的用途和获取途径)
7.法律名词及注释
7.1 法律名词1:相关法律名词解释
7.2 法律繁琐注释:对相关法律名词进行解释和说明。
MPC2860运动控制器用户手册说明书
MPC2860运动控制器用户手册(1.3版)版权申明成都乐创自动化技术股份有限公司保留所有权利成都乐创自动化技术股份有限公司(以下简称乐创自动化)保留在不事先通知的情况下,修改本手册中的产品和产品规格等文件的权利。
乐创自动化不承担由于使用本手册或本产品不当,所造成直接的、间接的、附带的或相应产生的损失或责任。
乐创自动化具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或间接地复制、制造、加工、使用本产品及其相关部分。
前言感谢购买MPC2860运动控制器!MPC2860是从本公司研制的一款高性能通用控制器。
本手册介绍了关于MPC2860的规格、使用方法,使用前请充分理解MPC2860的使用功能。
安全警告注意以下警告,以免伤害操作人员及其他人员,防止机器损坏。
◆下面的“危险”和“警告”符号是按照其事故危险的程度来标出的。
◆下列符号指示哪些是禁止的,或哪些是必须遵守的。
指示一个潜在的危险情况,如果不避免,将导致死亡或严重伤害。
危险指示一个潜在的危险情况,如果不避免,将导致轻度或中度伤害,或物质损坏。
这个符号表示禁止操作。
这个符号表示须注意的操作。
警告常规安全概要请查看下列安全防范措施以避免受伤害并防止对本产品或任何与其相连接的产品造成损伤。
为避免潜在的危险,请按详细说明来使用本产品。
使用正确的电源线。
请使用满足国家标准的电源线。
正确地连接和断开。
先将控制卡输出连接至转接板,再将电机、驱动器连接到转接板,最后开启电源。
断开时先关闭外部电源,再断开电机、驱动器与转接板的连接,最后断开控制卡与转接板的连接。
当有可疑的故障时不要进行操作。
如果您怀疑本产品有损伤,请让有资格的服务人员进行检查。
不要在的湿的/潮湿环境下操作。
不要在爆炸性的空气中操作。
保持产品表面清洁和干燥。
防止静电损伤。
静电释放(ESD)可能会对运动控制器及其附件中的元件造成损伤。
为了防止ESD,请小心处理控制器元件,不要触摸控制器上元器件。
GSK991单轴控制器使用说明
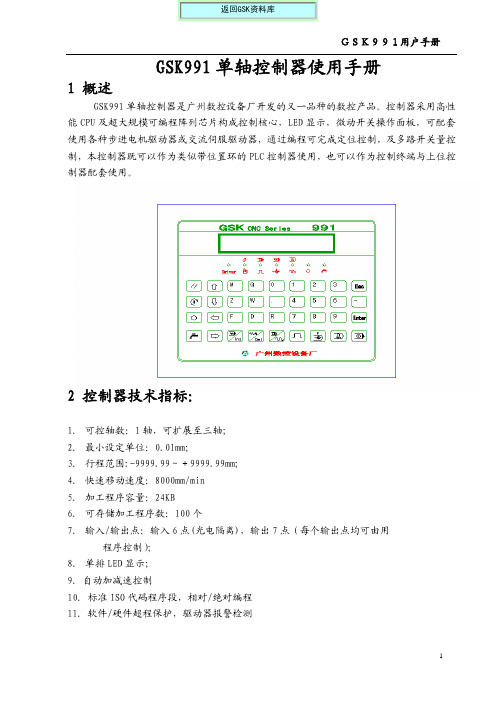
GSK991单轴控制器使用手册1 概述GSK991单轴控制器是广州数控设备厂开发的又一品种的数控产品。
控制器采用高性能CPU及超大规模可编程阵列芯片构成控制核心,LED显示,微动开关操作面板,可配套使用各种步进电机驱动器或交流伺服驱动器,通过编程可完成定位控制,及多路开关量控制,本控制器既可以作为类似带位置环的PLC控制器使用,也可以作为控制终端与上位控制器配套使用。
2 控制器技术指标:1.可控轴数:1轴,可扩展至三轴;2.最小设定单位:0.01mm;3.行程范围:-9999.99~+9999.99mm;4.快速移动速度:8000mm/min5.加工程序容量:24KB6.可存储加工程序数:100个7.输入/输出点:输入6点(光电隔离),输出7点(每个输出点均可由用 程序控制);8. 单排LED显示;9.自动加减速控制10.标准ISO代码程序段,相对/绝对编程11.软件/硬件超程保护,驱动器报警检测3 控制器操作界面见上图所示3-1 键盘及LED指示灯说明复位键 控制器复位0-9 数字键 程序指令数据,参数数据ENRER 回车键 对键入或选择内容确认↑↓←→ 光标键 主功能切换,编程时移动光标手动时移动方向控制自动模块中机床锁住。
选择单段停止,手动模块中快速/进给状态切换。
3-2 LED指示灯状态说明控制器有7个LED指示灯,从左至右编号为LED1-1ED7,不同状态表示不同意义,现分别注明如下:LED1 驱动器状态指示。
LED2 手动点动常亮指示,运行处于等待状态时闪烁提示。
LED3 单步/单段状态指示,手动运行处于单步状态,自动运行处于连续运行时常亮提示。
LED4 回机械零点/机床锁住指示,手动运行处于回机械零点状。
态,自动运行处于机床锁住状态时常亮提示。
LED5 快速/进给状态指示,LED灯亮时提示快速状态,LED灯灭时提示进给状态。
LED6 主轴状态指示,LED灯亮,提示主轴在转动,LED灯灭,提示主轴停止。
单轴控制器使用手册
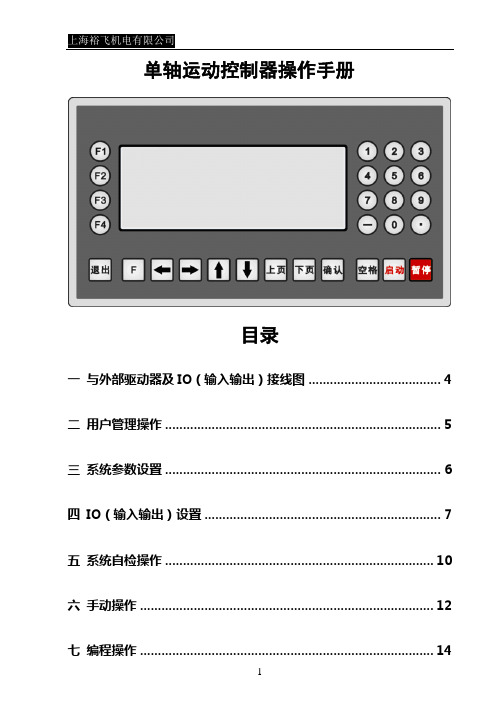
单轴运动控制器操作手册目录一与外部驱动器及IO(输入输出)接线图 (4)二用户管理操作 (5)三系统参数设置 (6)四IO(输入输出)设置 (7)五系统自检操作 (10)六手动操作 (12)七编程操作 (14)八自动执行 (17)九指令详解 (18)十电子齿轮计算及公式 (20)十一编程案例 (23)十二常见问题及处理 (28)一与外部驱动器及IO(输入输出)接线图1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线)2.IO(外部开关及继电器)的接线图(红色线为1号线)注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二用户管理操作注意:所有重要参数只有用户登录以后才可修改保存。
防止他人随意更改参数,影响加工质量。
从主画面进入参数设置,并进入用户管理,进行密码输入。
输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。
用户密码出厂值为“123456”。
用户登录成功后,则可进行加工参数的修改保存。
否则加工参数不可修改保存。
若进入此界面后,提示“用户已登录!”,表示用户登录成功。
然后直接按退出按键,对系统参数及IO设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内容全部不可更改。
若需要修改,再次进入用户管理进行登录。
注:用户密码可以修改。
但是必须要记忆下新设的密码,否则加工参数将不可修改保存。
三系统参数设置从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。
共分两屏,按“上页”“下页”键切换。
控制参数修改完毕可进入速度参数界面进行速度的参数修改,共2屏,修改方式同上。
修改完成后,按参数保存进入参数保存界面,按确认键对当前修改完成的数据进行保存。
若保存成功则提示“参数保存成功”。
注:加工过程中禁止进行参数保存。
按空格键,可将当前参数值清零。
当设定的速度值小于启动速度时,则速度值为启动速度。
简易版单轴步进电机控制器-9(RS232)使用说明书2015

I2:可以外接按钮,反转控制端(复位端,电机以上位机设定的运行速 度运行,直到碰到I4信号,电机停)
I4:可以外接NPN型光电开关,接近开关,或机械开关,用作反转限位. 脱机工作说明:通过上位机软件设定好各参数后保存,然后脱机上位机模式 称为脱机工作模式。 该模式下触发I1,电机按照在上位机上设定的距离、方向、速度运行。如果 运行方向设定为正,并且起点不在I3限位点时,则触发I1到达1点后触发I3正转限 位点,电机立即停止。 若方向为正,并且起点在I3限位点时,则触发I1电机不运行。如果运行方向 设定为反,并且起点不在I4限位点时,则触发I1到达0点后触发I4反转限位点,电 机立即停止。若方向为反,并且起点在I4限位点时,则触发I1电机不运行。 当触发I2信号,电机以上位机设定速度反转,直到碰到I4(反转限位点)后停 止运行。
3、 ffaa030b 01 000000b8-------------设定停止模式
01:缓慢停止
02:立即停止
4、 ffaa030c 00 000000b8-------------设定上电回零使能
0:上电不回零 1:上电回零 若上电回零功能开启,则每次上电后,自动找零点(此时需要给I4输 入点一个低电平信号),找到零点后,才进入设定的运行模式中。
(2)设定运行距离 例如:ffaa030340060000f5 【1600个脉冲】 0xff 0xaa 0x03 0x03(CMD,对应命令号) 0xnn 0xnn 0xnn(这3个字节表示运行距离,前面是低字节,后面是高字节) 0x00 0xnn(最后一个字节对应前面所有的字节的和的低8位,校验用) 回:0xff 0xaa 0x03 0x03 0x00 0x00
ENC_0T单轴系统说明书

11.输入输出: 12.坐标单位:
直流12V/1A 毫米
13.坐标范围: -7999.999 毫米 到 +7999.999毫米
14.速度单位: 毫米/分钟
15.速度范围: 50毫米/分钟 到 6000毫米/分钟
16.延时范围: 0.01秒到99.99秒
附录二: 输入输出信号接线表
附录三:安装尺寸示意图 面板开孔尺寸:192 X 122
3.4.11
:设置坐标,将当前坐标值重新赋值 格式:
xxxx.xx。
其中,xxxx.xx表示新赋值的坐标值。
3.4.12
:设置起点坐标,将程序起点坐标值重新赋值 格式:
xxxx.xx。 其中,xxxx.xx表示新赋值的程序起点坐标值。
3.4.13
:程序停止运行,此后的程序行不再执行,但不注销,可以通过 跳转来运行。 格式:
3.4 编辑状态 前面已经叙述,ENC-0T型单轴电机控制器不使用标准数控代码语言。 其加工程序中使用下述图标代表各项功能: 3.4.1
:空程序行,后面的程序将被注销 格式:
3.4.2
:绝对坐标运动,不管当前位置在何处,最终运动到的位置。 格式:
XXXX.XX FXXXX
X
X。 其中, F表示运行速度,单位:mm/分。
每一个程序行都必须选定一个固定的功能。 在涉及电机运行的功能中,如果设置了启动标识或者停止标识,当启 动标识有效时,电机开始运转,如果遇到停止标识有效则停止运转。如 果没有设置有效的启动标识和停止标识,则直接开始运转。
3.5 输入程序 在准备状态下长按 → 键进入程序编辑状态:
图6: ENC-0T单轴电机控制器的编程模式
“X+0000.00” 表示当前坐标值是0,右侧标记表示当前位置是程序零 点;“N00” 表示当前程序总行数为00;“F3000”表示当前手动及回 零速度为3000mm/分钟。
BE-1105运动控制器用户手册
2 概 述................................................................................................................2
2.1
行业应用............................................................................................................................................. 2
2.2.3 控制应用三:(自动往返模式) 设备在 A 点与 B 点之间往返运行。(停留时间可设定) 位置控制时可不需要限位开关,启动停止时有加减速。 设备上电后,外部触发启动运行,设备运行到 A 点正转限位后,自动反转运行到 B 点反转限位后,又 正转运行到 A 点,如此往返运行。直到触发急停按键电机停止运行。 2.2.4 控制应用四:(单次往返模式) 设备从 A 点到 B 点后返回到 A 点停止。(停留时间可设定)
单轴步进控制器PMC1110-03使用说明书
单轴步进控制器使用说明书一、功能●单电源输入:DC 7-12V●单脉冲输出,可选方向输出●正反方限位输入●原点输入●复位输入●杀车输入●使能输出● 16条曲线可编程设置切换运行●参数掉电记忆功能●输入信号都带光电隔离,所有输出为差分输出●曲线参数可通过面板设定和在线设定(带232,485接口)二、典型应用●贴标签机●包装专业设备●轻便传输系统●半导体晶片抛光●恒速或调速系统●测量仪器三、接线端子定义表注:未说明端口为空。
四、端口功能说明(一)输出端口:输出信号接口如下图所示1、ENABLE:当控制器运行曲线,输出脉冲时,输出为低电平;当控制器不运行曲线,没有输出脉冲时输出高电平。
2、DIR:当运动方向设置为0时,输出为低电平,反向;运动方向设置为1时,输出为高电平。
3、PULSE:当没有脉冲输出时为高电平输出,输出脉冲为负脉冲。
输出信号时序如下图所示(二)输入端口:输入信号接口如下图所示1、LIMIT-:反向限位输入,低电平有效。
在作反向运动中,一旦LIMIT-变为低,运动将立刻停止;在触发反向运动之前,如果LIMIT-为低,将不能触发运动。
2、HOME:原点输入,低电平有效。
在返回原点运动中,一旦HOME变为低,则说明回到了原点,立刻停止运动。
4、RESET:复位输入,低电平有效。
在没有作任何运动时,如果RESET变为低电平,系统将作慢速回原点运动(直到HOME为低电平为止)。
5、TRIG:运动触发输入,在运行模式1:一个负脉冲将触发一次所选择曲线点位运动;运行模式2:保持低电平,将保持作选择曲线连续运动,一旦TRIG 变为高电平,将做减速运动,直到停止。
6、STOP:运动停止输入,低电平有效。
在作两种运动时,一旦STOP变为低电平,将快速减速运动,直到停止运行。
此信号可作杀车输入。
6、LIMIT+:正向限位,低电平有效。
在作正向运动中,一旦LIMIT+变为低,运动将立刻停止;在触发正向运动之前,如果LIMIT+为低,将不能触发运动。
M-15S-单轴控制器
M15S 操作手册minikol M15S Zaxis操作手册目 录按键与灯号说明 (1)功能简介 (2)手动模式 (3)单动模式 (4)预设10组工程 (5)10组工程锁定与开放 (7)快速程序 (8)精修目标值 (9)现在值校正 (11)现在值 ± 方向设定 (13)分辨率设定 (16)读头与磁带间距调整 (18)参数设定 (22)参数表 (24)参数锁定与开放 (25)误信息或异常排除 (27)安装简介 (29)输出/入信号角位图说明 (31)外观尺寸图 (32)按键与灯号说明功能简介1、磁力尺十双(单)速定位功能+电池2、手动/单动3、10组单动程序4、10组刀具补偿(比如在双头锯上,裁切角度的不同,设定不同的补偿值)5、快速程序/精修目标值6、公制/英制7、显示单位0.1mm/0.05mm/0.01mm8、基准点校正9、输送带速度显示10、刀具/马达保护功能11、电池寿命2.5年12、实时自我诊断控制器规格1、外观尺寸:115w × 115h × 73d(mm)2、开孔尺寸:93w × 108h (mm)3、安装孔位:M3 × 4104 × 104 (mm)4、供应电压:24 VDC 50mA 2号1.5V电池× 15、电池电压控制:有低电压警示6、读头讯号线:标准:3m7、热膨胀系数:α = 16 × 10-6× 1/K8、读头间隔:max. 2.5mm9、显示屏幕:15mm LED × 6 digits × 2 line10、输出:4 digital output(AC250V / 7A;DC24V/10A)11、输入:4 digital input(24VDC)12、操作组件:20个按键13、Test mark/interfer Protection class:3 accord. to IEC 80114、速度:1.5m/s15、系统精度:± (0.025+0.02L)mm(L: Meter)16、重现性:0.01mm17、温度:工作温度0 + 50℃;储存温度 –20 +70℃18、湿度:max. 95% rF(Condensation not permitted)功能说明:可以使用M15面板上的键, 来执行机器寸动运转。
简易版单轴步进电机控制器-9(RS232)使用说明书2015
(1)设定细分和步距角 例如:ffaa03010800b40069 【8细分,1.8度】
ffaa03010400b40065 【4 1.8】 0xff 0xaa 0x03 0x01(CMD,对应命令号) 0xnn 0xnn(这2个字节对应细分,前面为低字节、后面为高字节) 0xnn(如:若步距角为1.8,则对应该字节的值就是180,对应 X 100) 0x00 0xnn(最后一个字节对应前面所有的字节的和的低8位,校验用) 回:0xff 0xaa 0x03 0x01 0x00 0x00
(3)设定运行方向和启动频率 例如:ffaa030400320000e2 【反转,启动频率50hz】
ffaa03040064000014 【反转,启动频率10hz】
ffaa030401320000e3 【正转,启动频率50hz】 0xff 0xaa 0x03 0x04(CMD,对应命令号) 0xnn(方向 0反转 1正转) 0xnn 0xnn(启动频率 前面是低字节 后面是高字节) 0x00 0xnn(最后一个字节对应前面所有的字节的和的低8位,校验用) 回:0xff 0xaa 0x03 0x04 0x00 0x00
3、 ffaa030b 01 000000b8-------------设定停止模式
01:缓慢停止
02:立即停止
4、 ffaa030c 00 000000b8-------------设定上电回零使能
0:上电不回零 1:上电回零 若上电回零功能开启,则每次上电后,自动找零点(此时需要给I4输 入点一个低电平信号),找到零点后,才进入设定的运行模式中。
(9)点亮LED灯 例如:ffaa000c05010000bb 0xff 0xaa 0x00 0x0c(CMD,对应命令号) 0x05 0x01 (点亮) 0x00 0x00 0xnn(最后一个字节对应前面所有的字节的和的低8位,校验用) 回:0xff 0xaa 0x00 0x0c 0x01 0x00
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简易单轴运动控制器使用说明书
该款简易单轴运动控制器SAMC(Simple Axis Motion Controller)不需编程,提供多种运动方式:单向单次、往返单次、单向连续、往返连续,自动回原点等,参数设置合理简单,工作中实时显示位置状态,适用于单轴步进电机的各种场合控制应用,如自动送料、自动冲床、自动剪板机、器件编带、商标印刷、切标机、切带机、化妆品封尾等。
一、性能指标:
1.输出脉冲频率:20KHz。
2.位置最大设置值999900脉冲。
3.速度最小设置值100Hz、加速度最小设置值100Hz/s。
二、电气特性:
1.工作电源:DC24V。
2.输入检测口:5V开关信号(IO1\IO2\IO3\IO4,TTL电平)。
3.输出控制口:P+、P-、D+、D-、E+、E-都是差分输出,当用作单端时,可利用Vcc(+5V)与P+、D+、E+配合使用。
三、使用操作说明
控制器底端有六个按键,分别是MODE、SET、SHIFT、UP、RUN、STOP分别表示模式、设定、移位、上加、运行、停止。
控制器通电(24V)以后,数码管全部显示零。
1.位移设定
按下MODE键,则显示1,表示位移设定模式,如需进入该模式,则按下SET键,此时百位闪烁(位移、速度、加速度的设置值规定都是100的整数倍,所以位移、速度、加速度都是从百位开始设置),每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT 键,则千位开始闪烁,同样方法完成各位设置。
当位移值设定好以后,则再次按下SET键,此时设定的位移值成功被CPU读取。
位移初始默认值是40000。
2.最大速度设定
再次按下MODE键,则显示2,表示最大速度设定模式,最大速度表示位移进给过程中最大进给速度,如需进入该模式,则按下SET键,此时百位闪烁,每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT键,则千位开始闪烁,同样方法完成各位设置。
当最大速度设定好以后,则再次按下SET键,此时设定的最大速度成功被CPU读取。
最大速度初始默认值是4000。
3.加速度设定
再次按下MODE键,则显示3,表示加速度设定模式,该值表示位移进给过程中电机按此加速度加速到最大速度或者减速到零,如需进入该模式,则按下SET键,此时百位闪烁,每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT键,则千位开始闪烁,同样方法完成各位设置。
当加速度设定好以后,则再次按下SET键,此时设定的加速度成功被CPU读取。
最大加速度初始默认值是4000。
4. 两次运行间隔时间设定
再次按下MODE键,则显示4,表示两次运行间隔时间设定模式,如需进入该模式,则按下SET键,此时个位闪烁,每按下一次UP键、数字显示增加1(1表示两次运行过程中间隔时间是1秒,如果该位不设置则默认为1秒),如果两次运行中间间隔时间较长、则按下SHIFT键,设置十位,设置完成后再次按下SET键,此时设定的连续运行停留时间被CPU读取。
注:最大停留时间最大是99秒。
5.运行模式设定
再次按下MODE键,则显示5,表示运行模式设定,如需进入该模式,则按下SET键,此时个位闪烁,每按下一次UP键、数字显示增加1,其中
1:表示单次单向运行,即运行到终点就停止。
2:表示单次往返运行,即运行到设定位移值后,停留设定时间,返回到起始位置。
3:表示连续单向运行,即运行到设定位移值后,停留设定时间,再次运行设定位置,如此循环。
4:表示连续往返运行,即运行到设定位移值后,停留设定时间,然后反向运行设定到位置,如此循环。
运行模式设定好以后,则再次按下SET键,此时运行模式成功被CPU读取。
运行模式初始默认值是1。
6. 旋转方向设定
再次按下MODE键,则显示6,表示旋转方向设定模式,如需进入该模式,则按下SET 键,此时个位闪烁,按下UP键,则数字在0、1变化,1表示方向信号输出D+为高电平、0表示方向信号输出D+为低电平。
设置完成后再次按下SET键,此时方向信号状态被CPU 读取。
旋转方向初始默认值是0。
7.使能设定
再次按下MODE键,则显示7,表示使能设定模式,如需进入该模式,则按下SET键,此时个位闪烁,按下UP键,则数字在0、1变化,1表示使能输出E+为高电平、0表示使能输出E+为低电平。
设置完成后再次按下SET键,此时使能状态被CPU读取。
使能初始默认值是0。
8.设定值掉电保存设定
再次按下MODE键,则显示8,表示设定值是否掉电保存设定模式,如需进入该模式,则按下SET键,此时个位闪烁,按下UP键,则数字在0、1变化,1表示将设定的位移值、最大速度、加速度、间隔时间、运行模式这5项值写入ROM,这样即使掉电或者复位,这些值依旧保存在CPU。
0表示设定值掉电或者复位后不保存。
设置完成后再次按下SET键。
CPU初始默认掉电不保存。
9.回原点模式设定
再次按下MODE 键,则显示9,表示回原点(IO4)模式,如需进入该模式,则按下SET键,此时个位闪烁,按下UP键,则数字在0、1变化,1表示进入回原点模式,在此模式下,必须设定正确的旋转方向,则电机就会以1KHz的频率回原点,碰到原点信号(IO4为低电平),立即停止运行,设置完成后再次按下SET键。
该值初始默认值是0。
注:如果不是该模式,即使碰到原点开关,电机也不会停止。
0.查询模式设定
再次按下MODE 键,则显示0,表示查询模式,如需进入该模式,则按下SET键,此时个位闪烁,按下UP键,则数字在1、2、3变化,1表示查询位移设定值,2表示查询最大速度设定值,3表示查询加速度设定值,设置完成后再次按下SET键,此时会显示对应要查询的值。
当所有需要设置的参数设置完成以后,按下RUN键,则P+/P-、D+/D-、E+/E-就会按照设定状态输出。
运行过程中可以随时按下STOP键让控制器停止发脉冲。
或者用户可以按下复位键(CPU旁边)使芯片复位。
如果有特殊要求,可以根据具体要求改动或者开发。