变频器控制的行车电路
变频器在行车上的应用_HENGSHENG20150504

操作 命令
变频器 响应
运行 命令
抱闸释放 时间设置
P604
转矩 校验
使能
抱闸 释放
变频器运行
运行 命令
撤消
运行令可在任何时间发出
t
悬停t 时间设置
P605
Brk Set Time P607
悬停 触发
抱闸 动作
溜钩 测验
以上设置的时间都可以设置的很小最低可设为0.1秒
PowerFlex 700/755-力矩校验
主起升降
副起升降 大车 大车 小车
目录 二、 转矩校验的介绍
变频器在位能性负载控制所必备的功能
• 零速满转矩输出 • 抱闸的控制由变频器I/O控制 • 电机的加减速时间短,要做到与传统转子串电阻的加减速性能一样 • 其他
– 转矩予加载 – 悬停 – 溜钩保护 – 空载高速运行
总之,合理的选择变频器的控制方式,正确的变频器的容量计算, 制动电阻的匹配. 变频器是足够满足此类应用
• TorqProveTM 确保停车后机械报闸可靠的控制负载, 和当收到运行命令,机械抱闸打开时变频器能控制 负载
• TorqProveTM and Force TechnologyTM 帮助消除人们对 V/F 标量型变频器和抱闸适时控制的不定因素的担 忧
– Reduced set-up time减小调试时间
• 当收到停车命令后,变频器减速到零速,维持零速一段时间(可设置)控制抱闸闭合. • 这个功能允许操作工可以重新定位,而不需要抱闸频繁动作. • 悬停功能也可由I/O 输入来控制(I/O 配置为Micropos/Float)
Micro Position 位置微调(数字输入端)
• 这个输入端的功能:使输出的速度降低为前一次速度的一定比例,降低的比例可设置. • 这匀许低速的移动物体,方便定位.
变频器在行车上的应用
变频电机与普通电机的主要区别在于:
因为变频器的输出有高次谐波,这就要求变频电机的绕组绝缘 等级要比普通电机的高,在改造中如果不更换电动机就必然需 要滤波器将高次谐波滤去,从而减小变频器输出的高次谐波对 电动机的危害!
四、 行车采用变频调速的优点
1 .消除了电动机的薄弱环节
——由于用笼型转子异步电动机取代绕线转子异步电动 机, 从而消除了电刷和滑环等薄弱环节。
提升/转矩校对功能
转矩校对(包括磁通建立和最后转矩测量) 抱闸校对(出现溜钩时的缓慢下放负载模式) 悬停功能 精确位置控制功能 快速停机功能 速度偏差故障、输出丢相故障、编码器丢失故障
转矩校验在起重设备的应用
转矩校验、机械抱闸校验
当变频器收到运行命令, 变频器将: 快速磁通建立,输出转矩 确认输出转矩存在后,释放抱闸 输出控制抱闸闭合 确认抱闸已控制住负载后,输出转矩撤消 (溜钩检测))
2 .行车运行过程可靠
——行车电机多用于低速状态,速度平稳,振动减小,可延 长电机寿命。
3 .延长制动电磁铁的使用寿命
——原拖动系统是在运动的状态下进行抱闸的。采用变 频调速后,可以在基本停住的状态下进行抱闸, 闸皮的磨 损情况将大为改善。
4. 操作手柄不易损坏
——原系统的操作手柄因受力较大,属于易损件。采用变 频调速后,操作手柄的受力很小,不易损坏。
失速保护
变频器会连续的监测速度命令和速度反馈,比较其偏差,如果偏差超出 所允许的范围,那么变频器将变为故障状态,同时,抱闸投入工作
编码器丢失保护
变频器会连续的监测编码器反馈,确保编码器工作正常 只要出现编码器丢失变频器马上变为故障状态,同时使抱闸投入工作 一但转矩校验使能,此功能必需使能
与变频器技术在行车中的应用
PLC与变频器技术在行车中的应用摘要:可编程序控制器(PLC)是一种工业控制计算机,在现代工业过程控制中得到了广泛应用。
行车作为起重设备,在大多数生产企业中使用广泛,但传统的继电器控制系统和串级调速方式存在故障率高、调速精度差、重载起吊容易出现溜钩等问题,可靠性得不到保证。
本方案利用了西门子公司的S7-300 型PLC结合ABB公司ACS800变频器对15+5吨行车进行了改造,获得良好的技术性能和经济性能。
论文主体一引言:西门子公司的S7-300 型PLC,从功能上看可以执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字式、模拟式的输入和输出,控制各种机械或生产过程。
体现出了良好的灵活性和通用性,具有抗干扰能力强、可靠性高,编程语言简单易学,与外部设备连接简单,使用方便,控制系统的设计、调试周期短等特点。
ABB公司的ACS800系列变频器是基于直接转矩控制的新一代交流调速设备,具有零速状态下的100%额定转矩输出能力,同时利用其自带的宏控制,可以在重载起重时避免溜钩现象的出现。
在吊钩下降过程中利用能耗制动回路的吸收可以避免因反电势过高对电机绕组的损坏。
利用该项技术对行车设备进行自动化改造,有着重要意义。
关键词:PLC 变频器行车控制改造备注;正转/反转选择,0=正转、1=反转。
加速/减速时间选择,0选择斜坡时间0,1选择斜坡时间1。
1 升降主电路升降主电路由三相交流电输入、主钩驱动变频器(ACS800-75KW)、副钩驱动变频器(ACS800-45KW)、吊钩电机、能耗制动单元等组成。
由于采用交---直---交变频器。
在负载自身重力下,制动时回路的能量不能送回电网,为限制泵升电压和负载下降时反电势的升高采用能耗制动单元。
2 大、小车主电路大、小车主电路由大车驱动变频器(ACS800-45KW)、小车驱动变频器、大车行走电机、小车行走电机、能耗制动单元等组成。
3 PLC控制电路选用西门子公司的S7-300 型PLC。
变频器在行车上的应用
以上设置的时间都可以设置的很小最低可设为0.1秒
PowerFlex 700/755-力矩校验
正常 操作
• 应用于起重于提升场合的具有TorqProve™ 功能的PowerFlex 700/755
– 电机转矩与制动控制
– 即使机械制动失效的安全负载控制
Copyright © 2005 Rockwell
100 50 0 -50 1. Drive started
4. Lifting occurs
3. 报闸释放 2. 电机转矩已建立
Time
不带力矩校验
100
Lifting occurs
50
0
-50
Brake release, Drive started
12
Time
Motor torque overcomes falling load inertia
• 变频器会重复以上的周期,直到抱闸能控制负载或负载安全下放到地面.
Speed Deviation Fault 速度偏离保护(失速保护)
• 变频器会连续的监测速度命令和速度反馈,比较其偏差,如果偏差超出所允许的范围,那么 变频器将变为故障状态,同时,抱闸投入工作.
Output Phase Loss Detection输出缺相保护
力矩校验在起重设备的应用
TorqProve Protection Feature Description Details:
Brake Slip Detection溜钩保护
• 当负载移动停止,机械抱闸闭合, 变频器将斜坡降低输出转矩,同时监测编码器反馈,确认负 载被控制.
• 如果监测到编码器反馈有变化(溜钩),变频器会马上增加输出转矩,重新控制负载,按照预先 设定的速度 下放负载.
工矿常用行车电器操作控制电路

工矿常用行车电器操作控制电路
电工伴侣在工作中最简单接触到的一种电气设备,那就是车间起吊重物的重要设备之一行车。
它应用非常广泛,由于工作生产中都离不开行车电器操作掌握电路这种设备,而这些配电线路虽然不太简单,但操作掌握箱和电缆线往往都设放在高处,故修理起来非常困难,这就要求电工从业人员能快速提高操作技术水平,把握更完整更细致的线路连接走向,更加熟识电工行车配电线路及连接规律,才能在修理这些电气设备中运用自如,并能快速诊断故障点,并在较短时间内上到行车上方去解决电气故障点,以保证生产和工作的需求。
因此在一些工厂里,行车是很重要的起吊重物的工具之一。
图画出了工矿常用行车电器操作掌握电路。
其中总开、总停为一般沟通接触器连接方法,图中上、下、左、右、前、后掌握电路为点动,对应的沟通接触器为KM3、KM4、KM5、KM6、KM7、KM8,并且电路中附加有限位开关以及换相互锁线路。
特殊值得一提的是,M1为起重电动机,它在机械上下起吊重物的过程中,装有限位断主动力线的断火限位器开关,以保证上下起吊不超过设定极限,保证起吊平安,由于电路简单问题在另外电路应用中再加介绍,行车电动机上下起吊M1电动机也为特种起吊电动机,因它设有断电制动装置,在不通电时制动装置处于制动位置,而只有通电后电磁铁线圈吸合,才能将制动解除,电动机才能运转,从而起吊重物。
图工矿常用行车电器操作掌握电路。
变频控制在行车上的研究与应用

于 内部 动作机 构 的机械 冲击 和瞬 时通断 产生 的电弧 等原因, 会使 元器件 本 身和行 车都产 生很 大 的噪音 、 共振 等 现象 。这不符 合 现代企 业生 产在环 保方 面 的
广泛应 用并 已成 为一 种趋 势 。行 车变频 控制 成为更
调 速不 理想 ; 其 是 启 动 和 停 车 时 , 在 很 严 重 的 尤 存
“ 的现 象 , 使 吊件 产 生较 大 的 摆 动 , 致 吊件 冲” 易 导
损 坏 ; 车行 走 是 由 2 台绕 线 电 机 牵 引 , 大 由于 两 台
1 普 通 行 车 的行 车 性 能 Nhomakorabea现 状
普 通行 车的 电力拖 动系统 采用 交流 绕线 转子异 步 电动机 , 用转 子 串 电阻的方 法进 行起 动和调 速 , 采 用继 电器 、 接触 器控 制 。 11 调速 精度 不高 , . 稳定 性不足 、 能表 现较差 性
普通行 车对 于行 走机 构和 提升 机构 的调速 多采
应 用 于行 车后 , 决 了普 通行 车 大车 不 同步 、 解 调速 范 围小 、 度稳 定性 差、 障率 高等缺 点。 速 故
关键 词 :行 车
0 前 言
行 车作 为 特 种设 备 , 炼 钢 厂用 于 吊运 铁 水 罐 在 和钢水 罐 , 着举 足轻重 的作 用 。但是 , 有 传统 电气 元 件 和装 置件 的先 天特性 决定 了普 通行 车存在 的一 些
电机所 串的 电阻值 有微 小 区别 、 电机 本 身 特性 略有
不 同和机 械传 动 的误 差 , 产生 大车 不 同步 , 大车 会 使
变频器在行车上应用

三、AB的PowerFlex700行车专用变频器 的功能介绍
提升/转矩校对功能
转矩校对(包括磁通建立和最后转矩测量) 抱闸校对(出现溜钩时的缓慢下放负载模式) 悬停功能 精确位置控制功能 快速停机功能 速度偏差故障、输出丢相故障、编码器丢失故障
2 .行车运行过程可靠
——行车电机多用于低速状态,速度平稳,振动减小,可延 长电机寿命。
3 .延长制动电磁铁的使用寿命
——原拖动系统是在运动的状态下进行抱闸的。采用变 频调速后,可以在基本停住的状态下进行抱闸, 闸皮的磨 损情况将大为改善。
4. 操作手柄不易损坏
——原系统的操作手柄因受力较大,属于易损件。采用变 频调速后,操作手柄的受力很小,不易损坏。
0
3. 报闸释放
-50
1. 变频器起动
抱闸释放
2. 电机转矩已建立
Time
不带转矩校验
100
提升
50
0
-50
1.变频器起动 抱闸释放
电动机转 Time 矩跌落
悬停功能
当收到停车命令后,变频器减速到零速,维持零速一段时 间(可设置)控制抱闸闭合 这个功能允许操作工可以重新定位,而不需要抱闸频繁动作 悬停功能也可由I/O 输入来控制
变频器在行车上的应用 及改造方案
—— A-B PowerFlex700行车专用变频器
变频技术工程师: 王 谦
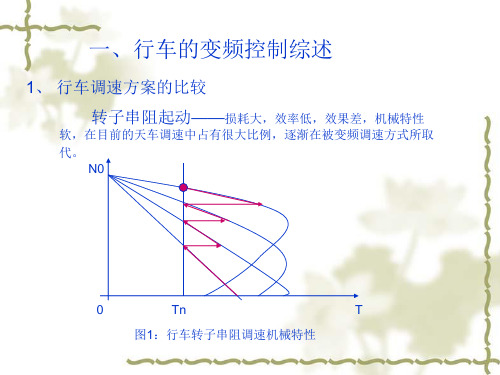
一、行车的变频控制综述
1、 行车调速方案的比较
转子串阻起动——损耗大,效率低,效果差,机械特性
软,在目前的天车调速中占有很大比例,逐渐在被变频调速方式所取 代。
PLC、变频器在行车系统中的应用(技师论文)
变频器、PLC在行车改造中应用单位名称:姓名:申报工种:申报级别:申报日期:变频器、PLC在行车改造中应用摘要:行车作为物料搬运系统中一种典型设备,在企业生产活动中应用广泛作用显著,因此对于提高行车的运行效率,确保运行的安全可靠性,降低物料搬运成本是十分重要。
针对行车正常使用和维护保养过程当中,出现的电能浪费、设备故障率高、电器元件损耗大的问题进行分析,并通过电气改造解决问题。
关键词:PLC 变频器电动机前言行车也称桥式起重机,主要用来起吊、放下和搬运重物、并使重物在一定距离内水平移动的起重、搬运的设备,它是由大车、小车、减速机、电动机、控制系统等设备构成。
我们公司是以生产模具为业务的企业,由于模具的重量重、形状特殊、精度高,搬运完全依赖于行车,因此它的运转情况直接影响到公司的正常生产,甚至涉及到工人的人身安全。
一、问题的出现因为生产需求,我公司在车间装配1台60吨和2台20吨起重量的行车,在使用过程当中经常出现相同问题:(1)起动电流过大,对电网冲击大;(2)机械设备使用寿命过短,电机连轴器、钢绳等机械易磨损;(3)接触器、继电器等电器元件的触头、线圈经常烧坏;(4)电动机故障率高。
而维修行车属于高空作业,极不方便,而且行车故障很大程度上影响了生产进度。
基于上述原因,公司派我对行车故障全面检查,进行改进。
二、故障检查与分析经过详细的检查、试验以及分析,产生故障的原因有5个方面:(1)拖动电动机容量大,起动时电流对电网冲击大,而且电动机一直在额定转矩下工作,电能浪费严重。
(2)行车升降、小车、大车起动、停止速度过快,而且都是惯性负载,机械冲击也较大,机械设备使用寿命缩短,操作人员的安全系数较差,设备运行可靠性较低。
(3)行车每天需进行大量的搬运工作,由于绕线式电机调速是通过电气驱动系统中的主要控制元件交流接触器并通过继电器来接入和断开电动机转子上串接的电阻,切换十分频繁,在电流比较大的状态下,容易烧坏触头、线圈。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“变频调速起重机电气控制系统项目实践”项目技术报告概要简述该项目的基本情况及团队分工等本次实训主要培养我们的动手操作,思维能力。
我们小组之间分工合作,提高我们的团队意识以及团结合作的能力。
首先,我们进行了分组,以4人一小组为单位。
实训过程中,以学生作为主体,通过小组合作、查阅资料完成实训任务,指导教师主要起指导、监督、答疑的作用,一般不替代学生进行实际操作。
在这仅仅两周的时间内要在电气技术基础平台课程的基础上,进一步将本学期已经学过的相关课程及在课程中已初步掌握的电气原理图的绘制设计、单元(技能)能力融合在一起,通过一个典型的设备电气控制方案的设计、元器件选型与采购、系统原理图的绘制、软件设计、产品的组装调试、产品质量检测检验分析与项目完成后的总结报告的撰写等完整工作过程的训练,培养学生完成一个实际工业设备电气控制项目的综合职业能力。
目录第一章桥式起重机模拟实训装置概述 (2)第一节结构概述 (2)第二节电气系统 (3)第三节电气控制原理 (5)第二章桥式起重机元器件的选型 (19)第一节起重机电气元器件选用 (19)第三章桥式起重机模拟实训装置的使用规则与操作要点 (20)第一节使用规则 (20)第二节安全操作 (22)第三节电控柜组装及通电检查 (26)第一章桥式起重机模拟实训装置概述第一节结构概述整套桥式起重机模拟实训装置由电控柜,行车桥架,移动装置及模拟驾驶室等部分组成,其整体装置如图所示:起升机构、小车运行机构和大车运行机构是起重机的三个工作机构,各机构都备有单独的电动机,进行各自的驱动。
起重机分为单钩起重机、双钩起重机。
单钩仅有一套起升机构;双钩有两个吊钩,即有主副两套独立的起升机构。
主钩用来提升重的物件。
副钩提升在其额定起重量范围内的物件,在它额定的负荷范围内也可协同主钩倾转或翻到工件之用。
当两个吊钩一起工作时,物件重量不应超过主钩的额定起重量,同时保证副钩起吊重量不超过副钩的额定起重量。
但必须注意,不允许两个吊钩同时提升两个物件。
每个吊钩在单独工作时均只能起吊重量不超过起重量的物件。
起重机的桥架由大车行走的两个工字钢端梁,一个小车行走的工字钢主梁,及支撑主梁和端梁的工字钢连接成的四方形支撑架组成。
桥架的每根工字钢之间采用螺栓连接,便于安装,拆卸和运输。
主梁和端梁的两端分别装有聚氨酯缓冲器,用以降低行车行走机构行至两端极限位置时所带来的冲击影响。
模拟驾驶室固定在整个实训装置桥架附近,由两个联动控制箱,一个座椅及一个脚踏开关组成。
第二节电气系统起重机模拟实训装置各个机构的运转,均有电控柜和模拟驾驶室(副钩除外)进行操纵。
电控柜装有总电源开关,各个机构所需电源开关,电源指示灯等装置,模拟驾驶室装有控制起重机模拟实训装置各个机构运转方向的凸轮控制器和主令控制器,以及指示灯,急停按钮和脚踏开关等装置。
桥架的主梁,端梁的两端分别装有限位开关和其他位置处的走线槽等电气设备。
现将电气设备分述如下一凸轮控制或主令控制器凸轮控制器或主令控制器用于直接操纵行车行走结构(包括行车左右行走,主钩前后行走)和主钩升降机构的启动,停止,制动,及正反转之用,它布置在模拟驾驶室的联动控制台之内。
二电控柜电控柜为整个实训装置提供动力,控制回路的电源。
电控柜内装有断路器,接触器,过流继电器,熔断器,中间继电器,相许保护器,变频器等电器元件。
电控柜是整个实训装置电气系统的核心,它还能用来对整个起重机实训系统上的交流电动机的过载保护,以及失压,零位,安全和各机构限位保护等。
如下图所示三副钩控制系统由于本实训装置的副钩动力装置采用的是单相供电,故此系统的控制系统是单独采用其自身所有的手操作控制盒来进行启动,停止,行走,升降控制,其所需电源由电控柜引入。
四限位和安全开关起重机模拟实训装置运行,行车运行和主钩起升机构行走,副钩升降均装有限位开关,以限制各机构的运动行程。
当限位开关断开后,相应的电路被切断,机构停止运转。
再次接通电源时,机构只能向相反的方向运转,从而保障了安全。
第三节电气控制原理起重机模拟实训装置的电气系统由动力回路和控制回路组成,其保护控制回路接入控制回路的有:1、起重机模拟实训装置行车行走的限位开关SQ4,SQ5;主钩行走的限位开关SQ2,SQ3和副钩起升的上升限位开关SQ1。
当行车或主钩行至极限位置或当副钩上升超过规定高度时,限位开关由接通变为断开状态,控制各机构电机的接触器相应断开,相关的动力电源被切断,以保证起重机安全工作。
再次投入运行时,必须先将控制手柄扳回零位,并按下电控柜起动按钮才能接通相关机构的电源,使相关机构电机向相反方向起动运转。
2、主回路总过流继电器LJ1 和各机构电动机的过流继电器的触点LJ2,LJ3,LJ4,FR1等是用来保护主回路和各电动机发生短路或过载之用。
当电动机电流超过过流继电器的整定值时,继电器动作,把它的触点打开,使相应的接触器断开。
3、缺相与相序保护继电器用来检测主回路是否断相和相序错误,以及欠压,过压等,当主回路断相,相序接法错误或是电压不稳定时,缺相与相序保护继电器的触点断开,切断主回路供电,进而避免各机构的电机在电压不稳或是缺相情况下运行。
4、电控柜及模拟驾驶室的紧急开关(急停按钮)和脚踏开关是供操作者在遇有紧急情况下切断总电源。
5﹑工作原理简述:①总控原理:模拟驾驶室的主令控制器手柄置于零位,所有急停开关弹起;合上断路器QF1,QF6,首先旋动电控柜“总控启动”旋钮SB9,接触器KM1线圈通电,回路触点KM1接通并自锁,接触器主触点吸合。
外部三相电被接入电控柜。
按下电控柜上的“总控停止”红色按钮,外部电源断开。
如图所示:②主钩行走原理:主钩行走电机利用接触器之间的连锁互锁来实现小主钩的前后行走。
在模拟驾驶室的主令控制器手柄置于零位,所有急停开关弹起,总电源通电的前提下,合上断路器QF2,旋动电控柜上“主钩行走启动”旋钮SB11,中间继电器KA1通电,并接通换向电路,将模拟驾驶室的主令控制器手柄推至“小车前”档,与之相应的KM2-1线圈通电,KM2-1常开触点闭合,主钩前进。
当主钩行至终点,主钩机构触碰“前行到位”限位开关SQ2,接触器KM2-1线圈断电,KM2-1断开,主钩电机停止;将模拟驾驶室的主令控制器手柄推至“小车后”档,与之相应的接触器KM2-2线圈通电,KM2-2常开触点闭合,形成自锁,主钩电机后退。
当主钩后退至起点位置时,主钩机构触碰“后行到位”限位开关SQ3,KM2-2接触器断电,主钩反转停止。
按下电控柜上的“主钩行走停止”红色按钮,主钩行走机构电源断开。
如下图所示:③主钩升降原理:主钩升降电机采用变频器控制正反转及多段速。
在模拟驾驶室的控制主钩升降的主令控制器手柄置于零位,合上QF3,旋动电控柜上“主钩升降启动”旋钮,接触器KM4通电,变频器通电自检,这时主钩升降机构处于选择等待状态。
将模拟驾驶室的控制主钩升降的主令控制器手柄推到“主钩上升”档位1档后,SA2-1,SA2-3接通,SA2-1使变频器端子S1接通,向变频器发出正传启动命令;SA2-3经KA2的常闭触电,向S3端子信号,这时S3、S4、S5状态为ON、OFF、OFF,这时变频器内部以速度一状态下上升运行;将档位推至速度二档位后,SA2-4接通,经KA3的常闭触电后向变频器S4短息发出信号,这时S3、S4、S5状态为ON、ON、OFF,变频器控制电机,变频器内部以速度三状态下运行;档位推至速度三时SA2-5接通,向S5端子接通,这时S3、S4、S5状态为ON、ON、ON,变频器内部以速度七状态下运行。
当档位推至速度四时,SA2-6接通,中间继电器KA2接通,常闭触电断开,此时S3、S4、S5分别为OFF、ON、ON状态,激发变频器以速度四状态下运行。
当档位推至速度五时,SA2-7接通,中间继电器KA3接通,常闭触电断开,此时S3、S4、S5分别为OFF、OFF、ON状态,激发变频器以速度四状态下运行。
这样通过变频器内部设置后即可实现速度一至速度五状态下运行。
将模拟驾驶室的控制主钩升降的主令控制器手柄推到“主钩下降”档位1档后, SA2-2,SA2-3接通,SA2-2使变频器端子S2接通,向变频器发出反传启动命令;SA2-3经KA2的常闭触电,向S3端子信号,这时S3、S4、S5状态为ON、OFF、OFF,这时变频器内部以速度一状态下下降运行;同理主钩以速度二、速度三、速度四、速度五状态下运行。
控制电路如下:变频器设置:运行指令通道:为F0.01。
有三种控制方式:0、1、2即0-键盘控制,即通过控制面板上的按钮启停和运行频率;1-端子控制,即通过S1、S2等功能端子进行正反转和速度的调节;2-485通讯,即通过485通讯协议来控制。
我们本次用的是端子控制的方式,所以F0.01选择“1”。
运行最大频率设置:即F0.04。
可以选择10~600Hz,主钩升降的最大频率为40Hz。
运行频率上限设置:即F0.05可以从F0.06~F0.04(运行最大频率)之间设置。
运行频率下限设置:即F0.06可以从0.0Hz~F0.05(运行频率上限)之间设置。
加速时间:即F0.08,可以从0~3600s之间设置,设置为2s。
减速时间:即F0.09,可以从0~3600s之间设置,设置为2s。
停机方式选择:即F0.19,有两种选择方式:0、1,即0-减速停车,即经过减速时间停止运行。
1-自由停车,即停止命令有效后变频器立即停止输出,电机按照惯性自由停车。
设置为1-自由停车。
端子功能选择:用于设置数字多功能端子对应得功能,S1~S6与F1.01~F0.06对于,每个端子有28种选择,主要有:1-正传运行;2-反转运行;12-多段速端子1;13-多段速端子2;14-多段速端子3。
设置F1.01为1,正传启动。
F1.02为2,反转启动。
F1.03为12,多段速端子1。
F1.04为13,多段速端子2。
F1.05为14,多段速端子3。
多段速设置:设置为F4.30-多段速1为40%; F4.32-多段速3为45%; F4.37-多段速7为50%; F4.36-多段速6为55%; F4.33-多段速4为60%。
即可实现速度从低到高的控制。
④行车行走原理:主钩升降电机采用变频器控制正反转及多段速。
在模拟驾驶室的控制主钩升降的主令控制器手柄置于零位,合上QF4,旋动电控柜上“行车行走启动”旋钮,接触器KM5通电,变频器U2通电自检,这时主钩升降机构处于选择等待状态。
将模拟驾驶室的控制行车的主令控制器手柄推到“行车左行”档位1档后,SA3-1,SA3-3接通,SA3-1使变频器端子S1接通,向变频器发出正传启动命令;SA3-3经KA4的常闭触电,向S3端子信号,这时S3、S4、S5状态为ON、OFF、OFF,这时变频器内部以速度一状态下左行运行;将档位推至速度二档位后,SA3-4接通,经KA5的常闭触电后向变频器S4短息发出信号,这时S3、S4、S5状态为ON、ON、OFF,变频器控制电机,变频器内部以速度三状态下运行;档位推至速度三时SA2-5接通,向S5端子接通,这时S3、S4、S5状态为ON、ON、ON,变频器内部以速度七状态下运行。