基于光电传感器的液位检测方法与装置
液滴检测

指导老师:任宏伟 小组成员:由彩慧 王健新 张佳琦
设计任务及要求
一、任务 设计并制作一个液体 点滴速度监测与控制 装置,示意图如右图 所示。需要检测液体 滴落速度和数量。滴 落速度范围为20-150 滴/分钟,可由滴速夹 调节。设计检测液体 滴落数量与速度,并 动态显示。
二、要求
3. 点滴速度控制方案选择
方案一:通过改变输液瓶高度控制垫 底速度。滴斗到受液瓶的高度H2来调节 点滴的速度,由电动机带动储液瓶使储 液瓶上升或下降改变滴斗到受液瓶的高 度H2,从而改变液体压强差,调节点滴 速度。 方案二:通过控制滴速夹的松紧来 控制点滴的速度。在输液瓶高度确定的 条件下,通过改变输液管导通横截面积 实现点滴速度的控制。 综合分析:方案一采用步进电机调 节输液瓶高度,通过高度与点滴速度的 关系实现PID控制,容易较实现。方案二 由于输液管横截面积小,变形后恢复速 度缓慢,安装工艺要求高,难以控制。 综合我们选择方案一。
2. 储液瓶液面检测报警电路
题目要求:在储液瓶位低液位时发出报警信号。在此是关键如 何检测到液位的高度,报警较易实现。检测液位有多种方法。 方案一:同点滴速度测量模块,仍然采用红外对管发射接收。 根据该接收管收到的光强的大小来判断液位是否达到警戒水位。 方案二:采用称重传感器检测。利用称重传感器检测总质量, 并与实际测量中当液体液面达到设定位置时的总质量相比较,根据 液体体积与质量的关系,当测量总质量与设定值相等时发出报警。 方案三:用测定电容的方法来检测。在瓶壁上用两块薄金属箔 包裹构造出一个电容。根据电容中的介质不同,可以确定是否达到 警戒水位。 综合比较:方案一储液瓶的透射性比滴斗弱,因此有无水时接 收管接收的信号差异大,电路利用发射接收管实现方便。方案二称 重传感器测量精度高,准确性能好,不过价格较贵。方案三不同的 液体介电常数不同,测试麻烦,实用性不强。综合比较,我们依然 选择了红外接收对射管检测液面检测,当液面达到液位低于2~3cm 时发出报警信号。
基于光纤传感技术的液化气罐液位监测系统设计
基于光纤传感技术的液化气罐液位监测系统设计随着液化气在生活中的广泛使用,液化气罐成为了人们生活中不可或缺的一部分。
为了保障人们的生命安全,液化气罐的液位监测显得尤为重要。
目前市面上存在着各种不同的液位监测方案,但是其中基于光纤传感技术的方案由于其高精度、低成本的特点,逐渐成为了一种备受欢迎的选择。
本文将介绍一种基于光纤传感技术的液化气罐液位监测系统的设计方案。
1. 系统概述本系统采用光纤传感技术,通过将光纤传感器置于液化气罐内侧墙面部位,将从传感器发出的光信号浸泡于罐底的液化气中,再由光电转换器接收,并将光信号等效为电信号输出,最终形成液位数据输出到监控平台上进行实时监测。
本系统确保了监测的高准确性和低成本。
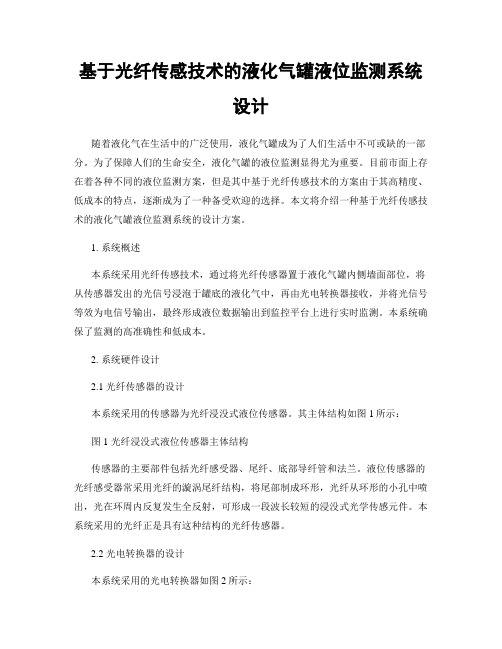
2. 系统硬件设计2.1 光纤传感器的设计本系统采用的传感器为光纤浸没式液位传感器。
其主体结构如图1所示:图1 光纤浸没式液位传感器主体结构传感器的主要部件包括光纤感受器、尾纤、底部导纤管和法兰。
液位传感器的光纤感受器常采用光纤的漩涡尾纤结构,将尾部制成环形,光纤从环形的小孔中喷出,光在环周内反复发生全反射,可形成一段波长较短的浸没式光学传感元件。
本系统采用的光纤正是具有这种结构的光纤传感器。
2.2 光电转换器的设计本系统采用的光电转换器如图2所示:图2 光电转换器的主体结构光电转换器主要由光电倍增管和前置放大器构成。
光信号输入光电转换器,通过光电倍增管将光信号转换为电信号,然后通过前置放大器进行增益,并将电信号输出到液位监测平台。
3. 系统软件设计3.1 数据采集和处理本系统采用的是PC机作为液位监测平台。
PC机通过RS232串口与光电转换器进行数据交互,将光电转换器输出的电信号进行调制、放大、滤波等处理后,输出液位高度数据,并对其进行显示和存储。
3.2 系统的实时监测与报警本系统支持实时监测和报警功能,可以通过设定液位的上下限,并对触发报警的灵敏度进行精确设置,实现对液位变化的实时监测。
基于红外光电传感应用的智能输液监测器
基于红外光电传感应用的智能输液监测器2.沈阳工业大学材料科学院与工程学院,辽宁省沈阳110870)摘要:为了更好地缓解医务人员工作压力,降低输液过程中医疗事故发生率,基于红外线技术,制作基于红外光电传感应用的智能输液监控器。
本检测器依据红外线对液滴下落的感应时长来分辨滴速,能精确测量和显示静脉输液的滴速,并在输液出现异常时发出声光报警。
同时,利用Zigbee模块进行输液信息的无线数据传输,将输液情况反馈给医护人员或患者家属,完成智能化输液监测。
该智能输液监控器的运用可降低输液风险并提高诊疗效率,对临床医学护理具有极大的助力作用。
关键词:红外对射技术;Zigbee;输液监测0引言输液做为医疗护理行业的关键治疗方式,因其治疗便捷、刺激性小、效果好而被广泛运用。
现阶段在医疗设备中,仍采取传统化的检测方法开展输液治疗,即医护人员依据工作经验调节输液速度,患者或家属需时刻关心输液瓶里的药品含量。
当输液即将完成时,需通告医护人员换药或终止输液。
但是,目前这种输液监护方式存在着很多缺陷。
首先,只有根据人眼分辨输液快慢,无法更加准确判断液滴滴速,治疗全过程中可能出现一些安全风险,会对患者的身体造成非必要的损伤[1]。
其次,像中国这样的人口大国,医患比例严重失衡,医护人员工作量巨大,有时候无法兼顾到每一个患者,但在输液完成或出现输液异常时,如果不能及时停止输液,也极容易对患者造成伤害,严重可危及到患者生命。
为了减缓医疗人员工作压力,降低输液事故率,我们利用红外光电传感器技术设计制作一款监测方法良好、体积小、并且不与药物接触的、能够实时传输输液信息的智能输液监控器。
该装置能够很好的监测输液情况,并可以将输液信息实时传递给医护人员或家属,大大提高了医疗安全。
1输液监测研究现状与分析为了更好的监护输液患者和提高医疗效率,降低静脉输液的事故率。
多年来国内外科研工作者对静脉输液的监控进行了很多种尝试,研究出多种不同方法的输液监控设备[3]。
光电液位传感器怎么安装和使用
光电液位传感器怎么安装和使用
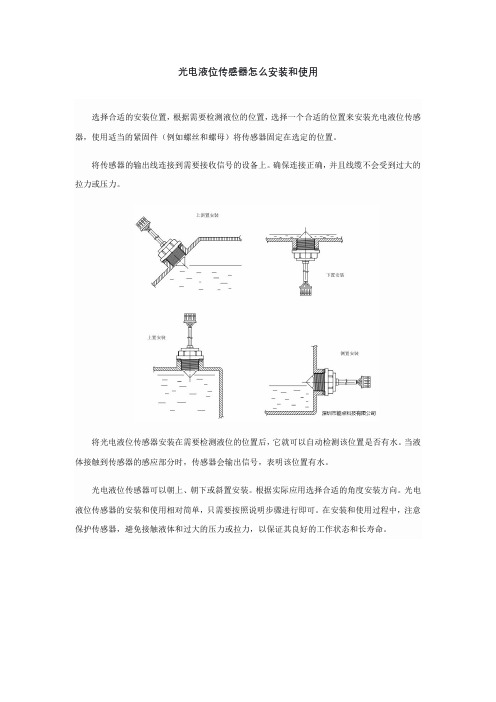
选择合适的安装位置,根据需要检测液位的位置,选择一个合适的位置来安装光电液位传感器,使用适当的紧固件(例如螺丝和螺母)将传感器固定在选定的位置。
将传感器的输出线连接到需要接收信号的设备上。
确保连接正确,并且线缆不会受到过大的拉力或压力。
将光电液位传感器安装在需要检测液位的位置后,它就可以自动检测该位置是否有水。
当液体接触到传感器的感应部分时,传感器会输出信号,表明该位置有水。
光电液位传感器可以朝上、朝下或斜置安装。
根据实际应用选择合适的角度安装方向。
光电液位传感器的安装和使用相对简单,只需要按照说明步骤进行即可。
在安装和使用过程中,注意保护传感器,避免接触液体和过大的压力或拉力,以保证其良好的工作状态和长寿命。
液位检测光纤传感器系统设计

液位检测光纤传感器系统设计Company number:【0089WT-8898YT-W8CCB-BUUT-202108】北京化工大学检测技术及仪器题目:液位检测光纤传感器系统设计专业:测控技术与仪器班级:测控1303姓名:孙应贵学号:1检测系统构成光纤液位传感器的结构如图所示传感器的主要组成部分有:双膜盒光纤位移探头和防水支撑结构。
双膜盒是水压变化的敏感组件膜盒中央为光滑平面近似反射平面,为提高反射光强度可以在膜盒中央粘贴一个小反射镜水压变化时双膜盒的1个膜片均发生形变:状态。
在实验装置中,光纤采用多光束光纤。
光纤分布呈半圆状、投射光纤输出端和接受光纤接收端纤芯直径为1mm膜盒内部为低真空状态。
测量时调整探头位置,将探头位置设置在输出特性曲线中较为灵敏的位置上。
当水面升高引起压力增加时,膜盒压缩、间隔增大,若压力减小时,膜盒膨胀,间隔减小。
光纤液位传感器的系统框如图3所示。
主要包括:光纤位移探头、双膜盒检测器、LED的光功率进行控制.由脉冲发生模块产生较为稳定的脉冲信号通过比较放大模块和激光管驱动电路驱动 LD背向光检测器接收的光功率并将其转化为电信号。
此信号通过调理电路处理后送到比较放大模块,与脉冲信号进行比较放大,并再次送入激光管驱动电路,完成对LD 光功率的稳定控制,使LD的光功率在一个很小的范围内波动。
激光器的驱动电路采用射极偏置电路。
它是交流放大电路中最常见的一种基本电路。
电路设计如图5所示。
信号调理电路信号调理电路包括光电流的IV及前置放大电路(图7).带通滤波电路真值转换电路和后置放大电路.从出射光纤接受的信号中含有背景光噪声.经过前置放大后,需要从其中得到可用信号.所以在前置放大后需要带通滤波电路将其中有用信号提取出来.考虑到前置放大器工作的稳定性,放大器的电流电压转换系数不宜太大.在光信号较弱的情况下,前置输出的信号较小.因此,调理电路中的带通滤波器采用带增益的有源滤波器.如图8所示.4系统测量结果与讨论系统的稳定性主要取决于电源的稳定和光源的稳定性。
液位感应器原理

液位感应器原理
液位感应器是一种用来检测液体的高度或液位的装置。
它基于液体产生的压力或电容变化来测量液位,并将其转换为电信号输出。
一种常见的液位感应器原理是利用液体对压力的作用。
液位感应器通常由一个装有气体或液体的容器和一个感应器组成。
容器内的液体会产生垂直方向上的压力,这种压力通过液位感应器中的感应器传感器来测量。
感应器通常包括一个压力传感器或电阻传感器,它们可以将压力转变为电信号输出。
当液位上升时,液体对传感器的压力增加,传感器会相应地产生一个电信号,反映出液位上升的状态。
这个电信号可以被连接到控制系统中,用于监测液位变化,并采取相应的控制措施。
另一种常见的液位感应器原理是利用电容的变化。
液位感应器通常由两个电极组成,它们分别置于容器的不同位置,以测量液体的高度。
当液体的高度发生变化时,液体与电极之间的电容也会发生相应的变化。
这种变化可以通过电容传感器来测量,然后转换为电信号输出。
液位感应器的原理取决于具体的设计和应用。
除了上述介绍的原理外,还有许多其他类型的液位感应器,如浮球液位传感器、超声波液位传感器等。
这些液位感应器在实际应用中广泛使用,例如在储罐、管道和化工设备等领域中。
它们的原理和操作方式可能会有所不同,但最终的目标都是实现对液体高度或液位的准确测量。
光电传感器测量液体液位的实验报告

光电传感器测量液体液位的实验报告实验报告一、实验目的:1.了解光电传感器的工作原理;2.掌握利用光电传感器测量液体液位的方法;3.分析光电传感器在不同液位下的输出信号特点。
二、实验原理:光电传感器是一种能够将光信号转换为电信号的装置。
它由光源和光敏元件组成,光源发出的光经过液体的折射、散射和吸收等过程,最终到达光敏元件上。
光敏元件对接收到的光信号产生电流或电压输出,从而实现对液体液位的测量。
三、实验步骤:1.准备工作:将光电传感器固定在测量液体容器上,确保它与液体接触的部分在同一水平线上。
2.载入试样:将不同液位的液体依次倒入容器中,使之与光电传感器接触。
3.读取输出信号:通过连接传感器的输出接口,使用示波器或数据采集卡等工具,记录传感器输出的电流或电压数值。
四、实验结果及分析:在不同液位下的实验结果如下表所示:液位(cm)输出信号(V)-------------------------------00.550.4100.3150.2200.1通过实验结果可以看出,随着液位的增加,光电传感器的输出信号逐渐减小。
这是因为光能在液体中的传播过程中会发生反射、散射和吸收等现象,导致到达光敏元件的光信号逐渐减弱。
因此,液位高度越高,传感器输出的电流或电压数值越小。
五、实验总结:本实验利用光电传感器成功实现了对液体液位的测量。
通过实验结果分析,我们可以得出结论,光电传感器的输出信号随着液位高度的增加而减小。
实验中还有一些因素需要注意,如确保传感器与液体接触部分在同一水平线上,以及尽量减小液体表面的污染等。
此外,还可以尝试在不同光源条件下进行实验,以研究光源对传感器输出信号的影响。
总的来说,本实验通过实际操作和数据读取,使我们对光电传感器测量液体液位的方法有了更深入的理解。
通过此次实验,我们掌握了利用光电传感器测量液体液位的基本原理和方法,并且成功获取了实验结果,进一步加深了我们对光电传感器的认识。
液体滴落检测与计数

液体滴落检测与计数系统摘要:为了减少人力浪费,获得良好医疗效果,设计了一种基于光电监测及无线通信技术的点滴监测系统。
系统采用TI公司的MSP430F149单片机作为核心控制芯片,通过LCD128*64显示模块、电机驱动模块、传感器模块、键盘模块等,实现点滴速度检测及液晶显示、速度控制与报警等功能。
本系统通过无线远程通信技术实现了单片机与上位机的通讯,使得值班护士在主监控台即可方便的了解各个从机的工作状况,并且能通过上位机控制各个从机,实现了输液系统的远程监控,且上位机通过无线连接可同时监控多套输液系统。
关键字:无线通信;光电传感器;MSP430F149单片机;步进电机;1.设计任务与要求1.1 设计任务医用吊瓶注射,需要检测液体滴落速度和数量。
滴落速度范围为20-150滴/分钟,设计检测液体滴落数量与速度,并动态显示。
图1 义勇吊瓶注射简图1.2 技术指标1.2.1基本要求可检测并动态显示液体滴落速度,滴落计数误差范围在10%±1滴,储液瓶低液位报警,低液位可调1.2.2发挥部分检测误差不大于5%,设计通过键盘设定滴落速度和数量的控制装置,实现装置的远程监控1.3题目评析随着微电子技术和信息技术的发展和应用,医疗监护设备正在发生一场信息化的革命。
传统的人工式的监护手段己经越来越不能适应当今多元化、信息化、个性化的医疗监护需求,所以对液体点滴速度监控的研究十分有意义。
本系统就是为了减少人力浪费,获得良好医疗效果而设计的液体点滴速度监控装置,利用该装置可以通过调节储液瓶高度达到控速点滴速度的目的,通过传感系统来确定点滴速度和药液输完后的报警,通过键盘设置液体点滴速度,系统主要难点是如何精确地检测液滴,这样系统才能实现液体点滴速度的智能化控制。
2.方案比较与论证2.1控制器的选取根据题目要求,控制器主要用于红外对管传感器信号的接收与辨认、控制点滴的速度、控制液晶显示滴速与系统运行以及液体到了警戒值发出信号等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于光电传感器的液位检测方法与装置20 引言液位检测在许多控制领域已经较为常见, 按原理分为浮子式[ 1 ] 、压力式[ 2] 、电容式[ 3 ] 、光纤式[ 4 ] 等。
这些检测方法和装置均有各自的原理、特殊结构、适用场合。
在一些测量中, 需避免测量仪器与被测液体直接接触, 此时这些方法便不适用。
基于光电传感器的液位检测方法[ 5~ 7] , 是将液位的变化转换为光信号的变化, 无需与被测液体直接接触, 可以满足上述场合。
但如果待测液体的液面有气泡, 光线在实际传播过程中会由于液面气泡的干扰而偏离其理论上的传播路径, 导致结果不准确。
本文提出一种基于双光电传感器和动态阈值的液位检测方法与装置, 可以很好地克服测量中由于气泡引起的干扰, 得到较好的液位控制精度。
1 原理本检测装置的光电传感器位置如图1 所示, 包括设置于透明玻璃管一侧的上下2 个特性一致的L E D 光源, 对应的水平放置的2 个特性一致的光电管, 两对传感器相应设有高度比液面厚度稍大的通光孔。
假设待测液体成分以水为主, 折射率n 约为1 . 33 3, 弯曲液面的边缘与玻璃管的接触角约为38 . 5[ 8] 。
光由光密媒质进入光疏媒质时, 当入射角大于某一临界角就会发生全反射现象。
由折射率公式n = 1 / s in C , 可求得临界角C 为4 8. 6。
图1 光电传感器位置Fig 1 Position of optoele c t r o n i c se n so r测量过程中, 入射光线的入射角随着待测液体液面的上升逐渐增大, 当入射角大于48 . 6时发生全反射现象; 而通光孔处入射光发生全反射区域的面积达到最大时, 光电管所能接收到的光线光强达到最小, 因此, 待测液体的液面一次通过光电管对应一个最小光强值。
由于液面在上升过程中, 形态基本保持不变, 故两对光电管在一次测量中测得收稿日期: 2009 03 19的最小值理论上相等。
以低液位测得的最小值为阈值, 对比阈值和目标控制液位的值即可以控制目标液位。
图 2 为弯曲液面经过传感器所采集的电压波形图。
图2 弯曲液面的电压曲线Fig 2 Vol tage c u rv e of c u r v ed li qu i d s u r f a ce2 硬件设计装置的总体电路框图主要部分如图3 所示, 包括光源1, 光源2 , 光电管1 , 光电管2 , A/ D 转换模块、单片机模块。
其中, 发光器件为L E D, 光电管为光敏二极管, A / D 转换采用M A XIM 公司的12 位A / D 芯片M A X12 46 , 单片机为S i l i c o n L ab s的C80 51 F3 40 。
图3 总体电路框图Fi g 3 Block dia gram of total ci r c u i t光源部分采用特性一致的两光电对管, 用精密电压调节器T L 43 1组成恒流电路驱动两L E D产生相同的光强。
恒流电路图如图4 所示, T L 43 1的RE F端恒定为2 . 5 V , 经R4 转换为恒定电流1 m A, 2 个L E D通过单片机的端口L1 ,L 2 被单片机控制分时点亮。
图5 检测程序流程图Fig 5 Fl ow chart of de t e c ti ve p r og r a m粘度等方面因素。
4 实验4. 1 测试条件玻璃管内径为10 m m ; 弯曲液面厚度为2 m m ; 光敏管与L E D 均为 5 m m 器件, 水平相对并分别位于玻璃管横切面轴线两侧, 光敏管与L E D 放置在遮光部件上并固定在铁架台上, 对应的通光孔宽为 2. 0 m m, 高为2. 8 mm ; 玻璃管与游标卡尺( 精度为0. 05 m m) 的活动端相连, 游标卡尺的另一端固定于铁架台上; 待测液体为V eidu o 全血质控液。
4. 2 测试方法使用本装置进行自动液位检测, 完成检测后移动游标卡尺活动端使液面到达预先设置的目标液位位置, 则游标卡尺读数为实际检测的液位与目标液位之间的高度偏差。
4. 3 实验结果分别用双光电传感器、动态阈值的方法和单光电传感器、固定阈值的方法重复测试 1 0 次待测液体液面有大量气泡情况下实测液位与目标的液位之间的偏差h1 与h2 , 测试结果见表1。
表1 液位检测的偏差数据Tab 1 E r r o r of l iquid level dete c t i n g图4 恒流源电路图Fi g 4 C i r c uit d i a g r a m of constant current so u r ce3 软件设计检测方法的单片机控制程序流程图如图 5 所示。
首先, 用液面先到达的光电管 1 测得一最小值, 并作为阈值存储起来, 然后, 用待控制液面处的光电管2 测得的值与该阈值比较, 当二者相差最小时的液面位置为所要控制的液面位置。
此最小值为预设程序中的预设值, 设置该值时, 应考虑所需控制的液体注入速度、液面上升速度、液体实测液位与目标的液位的偏差( mm )h1 0. 05 0. 30 0. 05 0.150.300.400.000.250.350.30h2 2. 45 0. 95 3. 75 5.051.902.753.954.853.254.30经计算双光电传感、动态阈值方法测试结果平均误差为0 . 22 mm , 标准差为0. 14 mm ; 而普通的单传感器、固定阈值方法[5 ]的测试结果, 平均误差为3 . 32 m m,标准差为1. 32 mm 。
其他的一些透射式或者反射式光电液面检测装置由于所用方法的局限性也无法在有气泡干扰的情况下保持良好的准确性。
由测试结果可见, 一般的方法在多气泡干扰情况下结果不稳定, 精度不高; 而本文提出的液位检测方法与装置性能稳定, 检测精度在多气泡干扰情况下仍可达0 . 2 mm。
( 下转第7 8页)实时的连续定位。
图 3 系统软件流程图Fig 3 Flowc h art of sy stem sof t w a r e参考文献:[ 1] 潘琢金. C 8051F 020/ 1/ 2/ 3 混合信号 ISP F L A SH 微控制器数据手册[ D B/ OL ] . [ 2007 07 22] . ht t p: w w w. x hl. c o m. c n/ sjsc / sjsc d et ail . as p? sid= 22.[ 2] P N I C o rp o rat i o n. S E N - S65 m a g net o - induct i v e se ns o r [ DB/OL ] . [ 2008 04 25 ] . ht t p: ww w . pnic o rp. c o m/ pr o duc t s/ all / sen - x y - a k a - se n - r# spe c i f i cat i o n s . [ 3]P N I C o r p o r a t ion . 3- a x i s m a g n et o - induct i v e se n s o r dri v e r a n dc o n t r o l le r w ith SPI serial inte r f ace [ DB/ O L ] . [ 2008 04 25] . ht - t p: ww w . pnic o r p. c o m / pr od uc t s / all / sen - x y - a k a - s en - r # spec i f ic a t i o n s.[ 4] Fr ee sca le Sem ic o nduct o r In c. 1. 5 g n ~ 6 g n t h ree ax is l o w - g nm icr o m a c hin ed ac c el er o m e t er[ DB/ O L ] . [ 2008 05 30] . ht t p: w w w . f re e sc a l e. c o m / w eba p p/ s ea r ch/ S erp. jsp? S el ect e - d A s set = D o c u m e n t at i o n .[ 5] S ie m ens. M C 55 s ie m e n s cel lula r e n g i ne [ DB / O L ] . [ 2005 0429] . ht tp: w w w . sie m en s. c o m / w m.[ 6] 孙 鑫, 余安萍. V C+ + 深 入详解[ M ] . 北 京: 电子 工业出 版社, 2006: 523- 556.[ 7] 刘 骜. 流 量计远 程维 护系 统的 设计 [ D ] . 杭 州: 浙 江大 学,5 结 论图 4 定位结果Fig 4 Position r e s u l t2007: 38- 47.[ 8] 陈建春. V i sual C+ + 开发 G IS 系统[ M ] . 北京: 电子工业出版社, 2004: 1- 614.[ 9] 马 亮. 车载定位系统中电子地 图的制作及地图 匹配计[ D ] .本文设计了一 种基 于 S O C 的 组合 定位 终端 器。
该 系 统具有体积小、重量 轻、功 耗 低、无 盲 区等 特 点, 通过 采用 GPS 和数字指南针组合定位, 系统消除了单一 GPS 定位存 在 的定位盲区等缺点, 而且, 系统的定位精度也得到了提高。
武汉: 武汉科技大学, 2008: 14- 38.作者简介:龚 敏( 1985- ) , 男, 湖 南益阳人, 研究 生, 研究方向为 控制理 论与控制工程。
( 上接第 7 4 页) 5 结 论本文的创新之处在于提出一种基于双光电传感器和动 态阈值的液位检测方法 与装置, 可以 很好地 克服测量 中气 泡引起的干扰。
由测试结 果可见, 本液 位检测 装置性 能稳 定, 检测精度在多气泡干扰情况下仍可达 0. 2 m m 。
对于本 设计尚可在做以下改进: 采用 规格更 小的传 感器提高 系统 的分辨率; 提高装置配 套的器 材的精 度进一 步减少系 统固 有误差; 优化单片机程序等。
参考文献:[ 1] 杨建春, 陈伟民. 连 通式光 电液位 传感器 在桥梁 饶度检 测中的应用[ J ] . 传感器与微系统, 2006, 25( 8) : 79- 81.[ 2] 孙慧 卿, 郭 志友. 液位测 量仪 的研 制. 传 感器 与微 系统 [ J] .2002, 21( 8) : 26- 28.[ 3] 隋修武, 谢 望, 樊 玉铭, 等. 电容 式液位 传感器 的有限 元计算与误差分析[ J] . 传感器与微系统, 2008, 27( 6) : 53- 58. [ 4] 骆宇锋, 高应俊, 刘志 麟, 等. 新型光 纤液位 传感器 及其系 统研究[ J] . 传感器与微系统, 2005, 24( 5) : 19- 24.[ 5] 王 红, 李孔宁, 韩伟民. 光电式液面传 感器设计的 研究[ J ] .仪表技术与传感器, 1996( 4) : 7- 9.[ 6] 史建军, 史红军, 史永基. 光学液位传感 器( 上) [ J ] . 传感 器世界, 2002( 9) : 15- 20.[ 7] 王伊卿, 赵万华, 施乐 平, 等. 光固化 快速成 型高分 辨率激 光液位检测系统的开发[ J] . 西安 交通大学 学报, 2008, 42 ( 11) :1394- 1397.[ 8] 苗润才, 朱 峰, 罗道斌. 激光反射法测 量弯曲液面 特性[ J ] .光子学报, 2007, 36( 10) : 35- 37.作者简介:田学隆( 1957- ) , 男, 重庆人, 教授, 主要研究方 向为生物 医学 检测与仪器、生物芯片与检测、生物物理技术等。