直线度测量计算方法
表示轴直线度
表示轴直线度一、什么是轴直线度轴直线度是一个用来描述轴线直线性质的指标。
在机械工程中,轴直线度是指一个轴线偏离理想直线的程度。
当轴线完全直线时,其轴直线度为0;当轴线偏离直线度越大时,其数值也越大。
轴直线度可以用于衡量与轴线有关的各种工件和设备的精度。
在很多领域中,特别是在制造业中,轴直线度是非常重要的,它对于保证产品的质量和性能具有至关重要的作用。
二、轴直线度的测量方法2.1 光学测量法光学测量法是一种常用的测量轴直线度的方法。
通过使用光源、光学仪器和探测器,可以确定轴线的直线度。
这种方法的原理是利用光束的投射和反射来测量轴线的直线度。
具体步骤如下:1.使用合适的光源将光束投射到待测轴上。
2.光束经过轴线后,由探测器接收反射的光线。
3.根据反射的光线的位置和角度,计算轴线的直线度。
光学测量法具有高精度、快速、非接触等优点,但是需要专业的设备和操作技能。
2.2 机械测量法机械测量法是一种常用且比较简单的测量轴直线度的方法。
这种方法主要是通过测量轴上的点的位置,然后计算轴线的直线度。
具体步骤如下:1.在轴上选择一些特定的测量点,并在每个点上进行测量。
2.测量每个点的位置,并记录数据。
3.根据测量数据计算出轴线的直线度。
机械测量法相对于光学测量法来说,设备和操作技能的要求较低,但是精度相对较低。
三、轴直线度的重要性轴直线度在机械工程中具有重要的意义和作用。
以下是轴直线度的几个重要方面:3.1 精度要求在很多机械制造过程中,对于轴线的精度要求很高。
例如,在机床加工中,如果轴直线度不达标,将会影响零部件的装配和性能。
因此,通过测量和控制轴直线度,可以提高产品的精度和质量。
3.2 运动平稳性对于一些运动控制系统来说,轴直线度是决定其运动平稳性的重要因素之一。
如果轴线的直线度不好,将会导致机械系统的震动和杂音,从而降低系统的稳定性和工作效率。
因此,保证轴直线度的准确性对于提高机械系统的运动平稳性非常重要。
3.3 铰合精度在一些副精度要求较高的装置中,轴直线度对于保证副件的铰合精度至关重要。
导轨直线度的检查调整和计算方法

水平仪的使用(作者未知)一、水平仪的使用和读数水平仪是用于检查各种机床及其它机械设备导轨的不直度、机件相对位置的平行度以及设备安装的水平位置和垂直位置的仪器。
水平仪是机床制造、安装和修理中最基本的一种检验工具。
一般框式水平仪的外形尺寸是200×200mm,精度为0.02/1000。
水平仪的刻度值是气泡运动一格时的倾斜度,以秒为单位或以每米多少毫米为单位,刻度值也叫做读数精度或灵敏度。
若将水平仪安置在1米长的平尺表面上,在右端垫0.02毫米的高度,平尺倾斜的角度为4秒,此时气泡的运动距离正好为一个刻度。
如图:1计算如下:水平仪连同平尺的倾斜角α的大小可以从下式中求出:由tgα= = =0.00002 则α=4秒从上式可知0.02/1000精度的框式水平仪的气泡每运动一个刻度,其倾斜角度等于4秒,这时在离左端200mm处(相当于水平仪的1个边长),计算平尺下面的高度H1为:tgα= =0.00002 H1=tgα×L1=0.00002×200=0.004(mm)由上式可知,水平仪气泡的实际变化值与所使用水平仪垫铁的长度有关。
假如水平仪放在500mm长的垫铁上测量机床导轨,那么水平仪的气泡每运动1格,就说明垫铁两端高度差是0.01mm。
另外,水平仪的实际变化值还与读数精度有关。
所以,使用水平仪时,一定要注意垫铁的长度、读数精度以及单独使用时气泡运动一格所表示的真实数值。
由此得知,水平仪气泡运动一格后的数值,是根据垫铁的长度来决定的。
水平仪的读数,应按照它的起点任意一格为0。
气泡运动一格计数为1,再运动一格计数为2,以此进行累计。
在实际生产中对导轨的最后加工,无论采用磨削、精磨还是手工刮研,多数导轨都是呈单纯凸或单纯凹的状态,机床导轨的直线度产生性也是少见的(加工前的导轨会有性的现象)。
测量导轨时,水平仪的气泡一般按照一个方向运动,机床导轨的凸凹是由水平仪的移动方向和该气泡的运动方向来确定。
导轨直线度的检查调整和计算方法

导轨直线度的检查调整和计算方法一、导轨直线度检查方法:1.平台检测法:使用平台平行度仪或测平工具,在导轨上选择若干测点进行检测,测定每个测点的偏差,以此判断导轨的直线度误差。
2.拉丝法:在导轨上安装拉丝仪器或者光电尺,并拉动拉丝仪器或者光电尺,测定导轨上的测量点位置,通过测量数据计算直线度误差。
3.光学法:在导轨上安装激光仪或者电子望远镜等仪器,利用激光或望远镜可以直观地观察到导轨上的直线度误差,通过观察和测量数据计算直线度误差。
4.数控法:利用数控设备在导轨上运动并记录运动轨迹,并与理想的直线进行对比,从而计算直线度误差。
二、导轨直线度调整方法:1.调整底座:如果底座与导轨不平行,则会影响导轨的直线度。
可以通过调整底座的平整度,使其与导轨平行,从而改善导轨的直线度。
2.调整安装方式:导轨的安装方式也会影响导轨的直线度。
如果导轨安装不牢固或者安装方式不正确,可以重新调整安装方式,使其安装正确,从而改善导轨的直线度。
3.调整导轨连接方式:在导轨连接处设置调整螺栓,通过调整螺栓的紧度,可以调整导轨的相对位置,从而改善导轨的直线度。
三、导轨直线度计算方法:1.最大偏差法:在每个测点上测量导轨的偏差,然后得出最大偏差。
最大偏差越小,说明导轨的直线度越好。
2.平均偏差法:在每个测点上测量导轨的偏差,然后计算偏差的平均值。
平均偏差越小,说明导轨的直线度越好。
3.二点法:选择导轨上的两个测点,并在这两个测点上测量导轨的偏差。
然后计算这两个偏差之间的差值,差值越小,说明导轨的直线度越好。
总之,导轨直线度的检查、调整和计算方法是非常重要的,可以通过合适的方法来评估导轨的直线度,进行相应的调整和修正,以保证导轨的直线度符合要求,提高设备的运行精度和稳定性。
直线度测量的计算方法解析
32 O 中固高新技术金生 2011 o5
基 于此 ,我 将 自己从 事计 量检 定及 计 量 技术 管理 工 作 多年 所 总结 出 的直 线 度 计 算 方 法 的 经 验 和 心 得 ,给 大家做 一 介 绍 。
一 、 直 线 度 误 差 值 的  ̄JY,U准 则
我 们知 道 ,直 线度 的定义 为 :包 容 实 际线 的两 平 行 直 线 问 的 最 小 距 离 。 同 时 应 符 合 最 小 条 件 判 别 准 则 , 也 叫 “相 问准 则 ”或 “直 线 准 则 ”,概 述 如 下 : (1)
两 包 容 线之 一 与 实 际 线一 个 方 向的两 极 点相 切 ; (2) 另 一一包 容 线 与 实 际线 的 另 一 方 向的 一 个 极 点 相 切 : 且 此 极 点在 另 一包 容线 的 投 影 处 于 另 外 两 极 点 之 问 。 即 三 个 极 点的位 置 应 高低相 间分 布 。
2005)[S】.北 京 :国家技 术监 督局 ,2005: 【22 】 北 京 市标 准计 量局 . 平 尺 校 准规 范(JJF 1097—2003)【s】.
北 京 :国家技 术监 督局 。2003. 【3】 张泰昌,陈志东,李隆.直线度与平面度误差值的评定 [M】.
北 京 :计量 出版 社 ,1981. 【4】 梁国明,张保勤.百种量具的使用和保养 【M】.国防工业
高 点 (2)、 (1.4)转成 等值 ,按 式 (4),求得 旋转
量: =i ;l ; _0_l,将各点旋转量填入⑥列;
开 始 旋 转 。将 第④ 列 和 第 ⑥ 列 数 值 相 加 得 出s值 (④+⑥ ),列于第 ⑦列 ;
确 定 直 线 度 误 差 值 。 对 第 ⑦ 列 数 值 按 “最 小 条 件 判 别 准 则 ” 进 行 判 别 , 如 不 符 合 , 则 按 上 述
直线度计算举例

直线度计算举例
直线度是测量物体表面平整度的一项重要指标,在制造、加工等行业中都有广泛应用。
下面我们就来介绍一下如何计算直线度。
首先,我们需要准备一个丝杠游标卡尺和一个平面板。
接着,在平面板上放置被测物体,调整其水平度,确保其表面平整度达到一定要求。
然后,在被测物体表面上选取多个点,最好是取连续的点,之后用丝杠游标卡尺分别测量这些点的高度。
这里需要注意的是,要将丝杠游标卡尺的两个传感器置于同一水平面上,以免出现误差。
完成高度测量后,我们将所测高度值代入计算公式中,即:
直线度=(最高点高度-最低点高度)/ 测量点数
测量点数即为所测得点的数量。
此时,我们得到的直线度数值就可以作为评判被测物体平整度的标准。
此外,在实际计算直线度时,我们还需要考虑一些其他因素,如丝杠游标卡尺的精度、平面板的平整度等。
在测量过程中,若发现点的测量值明显偏离周围点,应适当调节测试点位置再次测量,以确保结果的准确可靠。
总之,直线度是一项十分重要的指标,尤其在高精度制造和加工中更是必不可少。
通过正确的方法和步骤进行测量,可以得到准确的直线度数值,从而指导生产加工过程,提高产品的质量水平。
直线度计算方法

直线度计算方法
直线度是衡量一个物体、平面或轴线在空间中是否符合理想直线状态的一个技术参数。
其计算方法可以根据实际情况采用不同的测量技术和数学处理方法,以下是一些常见的直线度计算方法:
1、两点法:通过测量两个特定点之间的连线与理论直线的偏差来评估直线度。
通常适用于短距离且要求精度不高的场合。
2、最小区域法(Best Fit Line):
对于多个数据点,可以通过拟合一条最佳拟合直线(又称最小二乘直线),然后计算各个数据点到该直线的距离,取所有偏离值中的最大绝对值作为直线度误差。
3、端点连线法:
测量直线两端点,并连接起来形成理论直线,再测量实际轮廓线上各点与此直线的垂直距离,所有这些距离的最大差值即为直线度误差。
4、最小条件法:
在实际测量过程中获取一系列离散点,使用统计学的方法找到能够包容所有点并使其到此直线的平方和最小的直线,计算其他点到这条直线的偏差以评价直线度。
5、圆柱度仪测量法:
对于轴类零件,可利用高精度的圆柱度仪进行测量,仪器会根据被测轴表面的实际轮廓自动计算出直线度误差。
6、激光跟踪仪或三坐标测量机:
利用精密测量设备如激光跟踪仪或三坐标测量机,采集大量数据点后,
通过软件分析得出直线度误差。
7、影像测量技术:
通过光学影像测量系统对工件轮廓进行连续扫描,软件算法将根据扫描数据计算直线度误差。
无论哪种方法,最终都是通过对比实际测量结果与理想直线之间的差异,确定直线度是否满足设计要求。
直线度-形位公差之一

一)、直线度误差的测量和评定方法1、直线度——表示零件被测的线要素直不直的程度。
2、直线度公差:指实际被测直线对理想直线的允许变动量。
3、直线度公差带:包容实际直线且距离为最小的两平行直线(或平面)之间的距离ƒ或圆柱体的直径؃。
1)、给定平面内的直线度包容实际直线且距离为最小的两平行直线之间的距离ƒ。
2)、给定方向上的直线度误差当给定一个方向时,是包容实际直线且距离为最小的两平行平面之间的区域。
当给定相互垂直的两个方向时,是包容实际直线且距离为最小的两组平行平面之间的区域。
3)、任意方向上的直线度误差:包容实际直线且距离为最小的圆柱体的直径؃。
4、直线度误差的检测方法按照测量原理、测量器具及测量基准等可将直线度误差的检测方法分为四类:直接方法、间接方法、组合方法和量规检验法。
1)、直接方法:此类方法一般是首先确定一条测量基线,然后通过测量得到实际被测直线上的各点相对测量基线的偏差,再按规定进行数据处理得到直线度值。
(素线的测量)(1)、光隙法:将被测实际素线与其理想直线相比较来测量给定平面内直线度误差的测量方法。
是将刀口尺置于被测实际线上并使与被测线紧密接触,转动刀口尺使它的位置符合最小条件,然后观察刀口尺与被测线之间的最大光隙,此最大光隙即为直线度误差。
当光隙较大时,可用量块和塞尺测量其值,光隙较小时,可通过与标准光隙比较,估读出光隙量大小。
该方法适合于磨削或研磨加工的小平面及短园柱(锥)面的直线度误差的测量。
标准光隙:标准光隙由1级量块、0级刀口尺和1级平面平晶组成。
光隙尺寸的大小借助于光线通过狭缝时呈现的不同颜色来鉴别。
光隙 >2.5um时,光线呈白光:间隙在 1.25—1.17um时,呈红光:间隙约为0.8um时,呈蓝光;间隙<0.5um时,则不透光。
(2)、打表测量法、拉线基准法(测微法):用指示表测量零件表面直线度,是一种与理想直线比较,测量给定平面内直线度误差的方法。
直线度测量方法
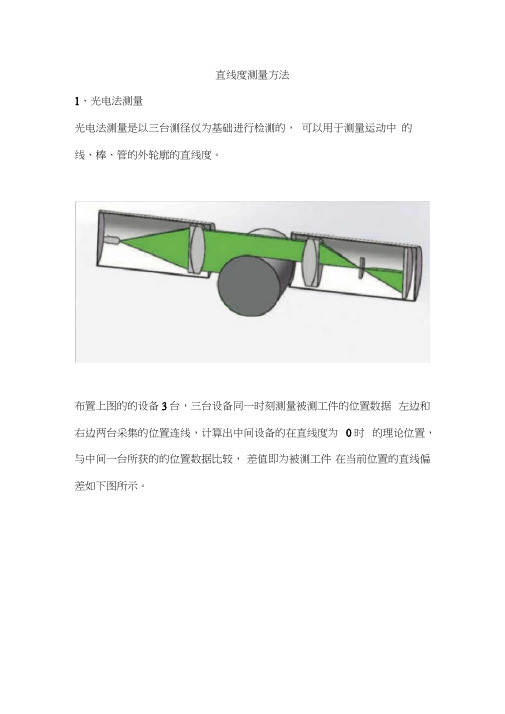
直线度测量方法1、光电法测量光电法测量是以三台测径仪为基础进行检测的,可以用于测量运动中的线、棒、管的外轮廓的直线度。
布置上图的的设备3台,三台设备同一时刻测量被测工件的位置数据左边和右边两台采集的位置连线,计算出中间设备的在直线度为0时的理论位置,与中间一台所获的的位置数据比较,差值即为被测工件在当前位置的直线偏差如下图所示。
测量单元的测量频率为500-1000HZ,采用电子同步控制单元实现3 台设备的同步采样,可连续检测,根据检测数据模拟出整根线、棒(管)材的直线度,左、右两台的距离可根据具体情况确定安装位置。
2、自准直法自准直法直线度检测仪可用于圆管外径的直线度检测。
平行光仪器是将和准直望远镜结合为一体的一台仪器。
光源将位于物镜焦平面(物镜焦距二f)的分划板投射至无穷远(准直光出射),经过平面反射镜返回的准直光经物镜后再次成像于同样位于物镜焦平面(共焦系统)的光电传感器的探测面上,当反射镜发生了a 角度的偏转后,返回的分划板在光电传感器上的像会产生AS的位移,通过精确测量出AS值,即可准确计算出平面反射镜的偏转角度。
检测内孔直线度时,将平面反射镜伸入孔内,利用胀套保证反射镜与内孔垂直。
当内孔有弯曲时反射镜将偏转一定的角度,通过反射镜的偏转角度可以计算出内孔的直线度。
3、PSD芯片激光测量法激光器安装在激光器座上,激光器座的尾部有4个螺钉可以对激光的照射角度进行微调。
其头部与定心套连接后插入炮管孔内。
位置检测单元的激光位敏传感器安装在传感器座内,传感器座的头部与定心套连接,尾部与推杆连接。
通过手动推动推杆可以使位置检测单元在炮管内孔内移动。
激光器定心去工作时激光器发射1束激光射向激光位敏传感器,传感器内的PSD 芯片监测接收到的激光能量中心位置。
定心套用来保证传感器一直处于炮管内孔的中心位置。
当炮管在检测位置出现弯曲时,PSD芯片上的激光能量中心坐标值将发生变化。
位置检测单元的电源线和数据线通过推杆中心孔与控制柜连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1引言
在工程实际中,评定导轨直线度误差的方法常用两端点连线法和最小条件法。
两端点连线法,是将误差曲线首尾相连,再通过曲线的最高和最低点,分别作两条平行于首尾相连的直线,两平行线间沿纵坐标测量的数值,通过数据处理后,即为导轨的直线度误差值;最小条件法,是将误差曲线的“高、高”(或“低、低”)两点相连,过低(高)点作一直线与之相平行,两平行线间沿纵标坐测量的数值,通过数据处理后,即为导轨的直线误差值。
最小条件法是仲裁性评定。
两端点连线法不是仲裁性评定,只是在评定时简单方便,所以在生产实际中常采用,但有时会产生较大的误差。
本文讨论这两种评定方法之间产生误差的极限值。
2误差曲线在首尾连线的同侧
测量某一型号液压滑台导轨的直线度误差,得到直线度误差曲线,如图1所示。
由图可知,该误差曲线在其首尾连线的同侧。
下面分别采用最小条件法和两端点连线法,评定该导轨直线度误差值。
(1)最小条件法评定直线度误差
根据最小条件法,图1曲线的首尾分别是低点1和低点2(低点1与坐标原点重合),用直a1a1线相连,如图2所示。
通过最高点3作a1a1直线的平行线a2a2。
在a1a1和a2a2两平行线包容的区域,沿y轴测量的数值,经数据处理,即为该导轨的直线度误差值
δ最小法。
(2)两端点连线法评定直线度误差
根据两端点连线法,图1曲线的首尾也分别是曲线的两端点1和2,如图3所示。
将曲线端点1和端点2,用直线b1b1相连,再通过高点作b1b1的平行线b2b2。
在b1b1和b2b2两平行线包容的区域,沿y轴测量的数值,经数据处理,即为该导轨的直线度误差值δ两端点。
(3)求解两种评定方法产生的误差极限
由于是对同一导轨误差曲线求解直线度误差,图2中的“低点1”、“低点2”和“高点3”分别对应图3中的“端点1”、“端点2”和“高点3”,即直线
a1a1与直线b1b1重合,直线a2a2与直线b2b2重合,因此两种评定方法产生的误差值为零
通过上述分析,误差曲线在首尾连线的同侧,两种评定方法产生的误差极值为零,即两种评定方法所得的评定结果相同。
3误差曲线在首尾连线的两侧
在测得的导轨直线度误差曲线中,有些误差曲线在首尾连线的两侧,如图4所示,该导轨的误差曲线首尾连线与ox轴重合。
用最小条件法和两端连线法,评定该轨导的直线度误差。
由图4可知,o点和c点是曲线的两个低点,也是曲线的两端点,而d点是曲线的最高点。
根据最小条件法,将o点和c点用直线a1a1相连,如图5所示。
通过最高点d作直线a2a2平行于直线a1a1。
在a1a1和a2a2两平行线包容的区域,沿y轴测量的数值,经数据处理,即为该导轨的直线度误差值δ最小法。
根据两端点连线法,过c点和d点分别作两条平行于ox轴的直线,如图5所示的虚线b1 b1和b2b2。
在b1b1和b2 b2两平行线包容的区域,沿y轴测量的数值,经数据处理,即为该导轨的直线度误差值占两端点。
为了求解占最小法和占两端点值,过d点,作平行于y轴的直线,交轴于a 点,交a1a1直线于h点,交b1b1直线于f点;过c点,作平行于y轴的直线,交轴于e点。
(1)最小条件法评定直线度误差
根据最小条件法,沿y轴测量的数值,经数据处理,即为该导轨的直线度误差值δ最小法。
由图5可知
而bd=ba+ad则
△oab和△oec是两个相似三角形,则
整理式(3)得
将式(4)代入式(2),整理得
(2)两端点连线法评定直线度误差
根据两端点连线法,沿y轴测量的数值,经数据处理,即为该导轨的直线度误差值δ两端点。
由图5可知
而fa=ce则
(3)求解两种评定方法产生的误差值
式(6)-式(5),即
整理得
(4)求解两种评定方法产生的误差极值
在图5中,令ad=δ1,ce=δ2,oa=p;令被测导轨长度为l,则oe=l-p,则
例如,当p=0.5m,即节距为0.5m,δ1=1.0δ,d2=0.25δ,被测导轨长度为l-2m,则两种评定方法产生的误差比为
两种评定方法产生的误差比为0.154,即两端点连线法比最小条件法产生的误差大15.4%。
在上式中,当,即误差曲线的最高点与最低点相距无穷远时,则,整理得
例如,当δ1=1.0δ,δ2=0.25δ,高点与最低点相距无穷远时0.25,误差
曲线的最在此条件下,两种评定方法产生的误差比为即两端点连线法比最小条件法产生的误差大25%。
当δ1=δ2,即误差曲线的最高点与最低点距离相等,如图6所示,则两种评定方法产生的误差极值为
由此可见,当导轨最高点与最低点相等且相距无穷远时,两种评定方法产生的误差最大,最大可达到100%。
表1列出了导轨误差曲线各点分布在两端点连线的两侧,当测量节距p=0.5,误差曲线的最高点与最低点距离相等,被测导轨为不同l值时,两种评定方法产生的误差比。
4结语
直线度误差曲线上各点,在曲线两端点连线的同侧,则两种评定方法产生的误差为零,即两种评定方法所得到的结果相同。
直线度误差曲线上各点,在曲线两端点连线的两侧,误差曲线的最高点与最低点相等且相距无穷远,则两种评定方法产生的误差最大,两端点连线法比最小条件法产生的误差最大可达100%。
由此可见,在生产实际中,评定大型机床导轨直线度误差,具体选择哪一种评定方法,十分重要。
当误差曲线各点在两端点连线的两侧,首先考虑选择最小条件法来评定。
如有侵权请联系告知删除,感谢你们的配合!。