注塑机机械手接口
机械手与注塑机联线注意事项

机械手与注塑机联线注意事项
●注塑机符合下列情况之一时,需要将允许合模信号串入合模
电磁阀。
1、注塑机如果选择“机械手不使用”时,允许合模信号输入点
不起作用,
2、如果注塑机没有再循环信号,只有一个合模信号输入点
例如:海天注塑机
3、如果允许合模信号已占用,则用机械手模式信号串入合模电
磁阀
●对于提供全自动运行信号的注塑机,一定要将该信号接到机
械手中。
(全自动信号使用时候,注塑机没有给出全自动信号机械手在进入全自动状态不会下行)
●务必注意电压信号极性,防止接错。
●各厂家注塑机对信号名称叫法不一,一定要弄清其实际功能
再接线。
塑机和机械手的通讯协议
塑机和机械手的通讯协议塑机和机械手通讯协议是为了实现塑机和机械手之间的数据交换和控制操作而制定的一套标准规范。
通讯协议定义了双方通信的格式、数据类型、指令集以及数据传输方式等。
下面将对塑机和机械手通讯协议进行详细介绍。
一、通讯协议的作用通讯协议的主要作用是实现塑机和机械手之间的数据传输和控制操作。
通过通讯协议,塑机可以向机械手发送控制指令,比如移动、抓取、放置等指令,机械手可以接收并执行这些指令。
同时,机械手也可以向塑机反馈当前的状态信息,如位置、速度、力量等。
通讯协议的制定可以确保双方之间的数据传输稳定、可靠,并提高生产效率和精度。
二、通讯协议的标准通讯协议一般由工业标准化组织或相关的行业组织制定,并经过长时间的实践和验证。
目前常见的塑机和机械手通讯协议有以下几种:1. Modbus协议:Modbus是一种通用的串行通信协议,广泛应用于工业自动化领域。
Modbus协议简单、可靠,具有良好的兼容性。
可以通过串口、以太网等方式进行通信。
2. CAN协议:CAN(Controller Area Network)协议是一种广泛应用于工业控制领域的串行通信协议。
CAN协议具有较高的通信速度和可靠性,能够满足实时性要求较高的应用场景。
3. Ethernet/IP协议:Ethernet/IP是用于工业自动化领域的一种开放标准的通讯协议。
Ethernet/IP基于以太网技术,可以实现多种设备之间的数据交换和控制操作。
4. OPC协议:OPC(OLE for Process Control)是一种开放标准的通讯协议,用于实现不同厂商、不同类型设备之间的数据交换和通信。
OPC协议可以通过OPC服务器来实现塑机和机械手之间的通信。
三、通讯协议的内容通讯协议包括以下内容:1.数据格式:通讯协议规定了双方之间的数据格式,如数据帧的结构、字节顺序等。
数据格式的规定可以确保双方之间的数据能够正确地解析和处理。
2.数据类型:通讯协议定义了双方之间所使用的数据类型,如整型、浮点型、字符串等。
甬江塑机接线图及操作步骤

甬江塑机接线图
机械手共使用1、2、3、5、6、7、8、双色 一共8根线,其中,5、6为一组,接注塑机B23和HCOM , 7、8为一组,串联锁模阀, 56、78 为同一组,均可互换。
机械手电源为2相220V 务必接地线
3号线 38A
2号线
注塑机安全
门(B21) 继
电
器
接
线
操作:
1 先将机械手安装到注塑机上。
把安全螺丝拿掉。
将注塑机连接线接到机械手上。
2 调整注塑机行程,决定开模距离后,开模到底,将机械手功能打开,在机械手的手控器上监视画面中有(开模完)信号,然后调整机械手的上下,前后,中心点等。
3 插上气管,按机械手的(教导)按钮,读入01 写至21-50任一模号。
或自行教导动作,详见说明书操作步骤。
4 按机械手(功能)键,将安全门选择为使用,意思就是说当安全门打开时,机械手不会下降,以确保安全。
5 将注塑机选择半自动,将机械手选择全自动。
看一模是否可成功将产品取出,如可以将注塑机与机械手全部选择全自动。
6 中模开关(红色的那个感应开关)仅在三板模时使用,将磁力表做放置于后安全处,让中模开关对准中模,以确保中模在未被拉开时手臂下降造成的损坏。
7 不使用机械手时可将手控器右边的开关拨下,即不使用。
当机械手关闭电源时,务必将复归接头与注塑机连接线插上,不然注塑机不会锁模。
8 机械手使用的气压不得低于5kg.。
9 取产品时,按(时间)键,可慢慢调整机械手前进,吸取的延时时间,最好是调到顶针刚刚顶出,机械手刚好吸取。
10 尽量多看看说明书,上面有所有的正确操作方法。
注塑机机械手装机配电手册
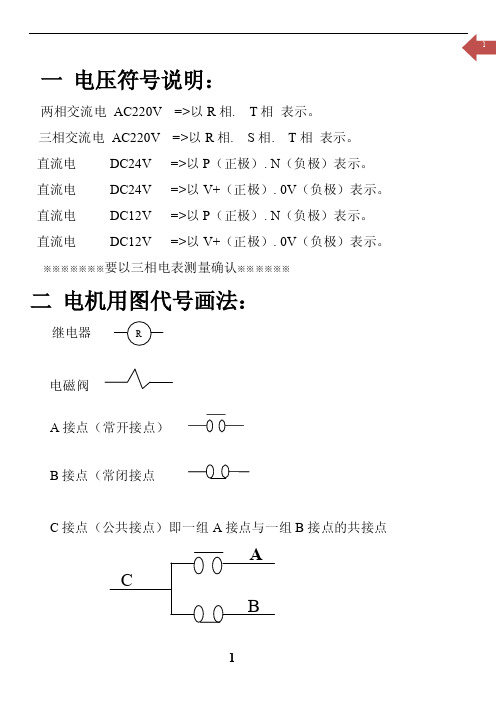
一 电压符号说明: 两相交流电 AC220V =>以R 相. T 相 表示。
三相交流电 AC220V =>以R 相. S 相. T 相 表示。
直流电 DC24V =>以P (正极). N (负极)表示。
直流电 DC24V =>以V+(正极). 0V (负极)表示。
直流电 DC12V =>以P (正极). N (负极)表示。
直流电 DC12V =>以V+(正极). 0V (负极)表示。
※※※※※※※要以三相电表测量确认※※※※※※二 电机用图代号画法: 继电器电磁阀A 接点(常开接点)B 接点(常闭接点C 接点(公共接点)即一组A 接点与一组B 接点的共接点三 造裕机械手信号接线定义:开模安全 12此接点为一“常开接点A(接点)”, 即机械手下降至模内时, 此接点为断路射出机不能开模.关模安全 34此接点为一“常开接点A(接点)”, 即机械手下降至模内时, 此接点为断路射出机不能关模.突模延迟 67此接点为一“常开接点A(接点)”, 即自动时机械手顶针延时时间到, 此接点为短路射出机才能顶出.关模启动 8 9此接点为一“常开接点A(接点)” 且为一瞬间接点, 即自动时机械手下降取物上升后, 此接点为短路直到开模完信号断路, 此接点即断路.开模完成信号11此接点为射出机已开模完成停止信号, 机械手可下降的信号, 需是一组电源输入至机械手, 此信号可为DC12V ,DC24V ,AC220V , 只需更换机械手机身继电器板 RY1 继电器.安全门信号 13此接点为射出机安全门已关上信号, 需是一组电源输入至机械手, 此信号可为DC12V ,DC24V ,AC220V , 只需更换机械手机身继电器板 RY0 继电器.电源 AC220V 14号 15号 电线四机械手信号接线方法:1 开模完成信号:⑴旧型继电器回路射出机。
如开模完成信号开关,没有单独输出则采用下列接法需加一个继电器。
注塑机下料专用机械手的设计与研究
注塑机下料专用机械手的设计与研究I. 内容简述随着科技的不断发展,注塑机在现代制造业中扮演着越来越重要的角色。
然而传统的注塑机下料方式存在一定的局限性,如效率低、精度差等问题。
为了提高注塑机的下料效率和精度,本文对注塑机下料专用机械手进行了设计与研究。
本研究首先分析了注塑机下料过程中存在的问题,如操作人员劳动强度大、生产效率低、安全隐患等。
针对这些问题,提出了采用注塑机下料专用机械手进行自动化生产的解决方案。
该机械手通过精确的运动控制和定位功能,实现了对注塑机模具内零件的快速、准确抓取和放置,从而提高了生产效率和产品质量。
为了满足不同类型模具的需求,本文设计了一种通用的注塑机下料专用机械手结构。
该结构包括底座、手臂、手指、夹具等部分,具有较高的刚性和稳定性。
同时通过采用先进的传感器技术,实现了对机械手运动轨迹的实时监测和控制,保证了下料过程的稳定性和安全性。
此外本文还对注塑机下料专用机械手的运动学模型进行了建模和仿真分析,验证了机械手性能的有效性。
通过对仿真结果的优化,进一步提高了机械手的性能和实用性。
本文对注塑机下料专用机械手的应用前景进行了展望,认为随着技术的不断进步,该机械手将在注塑机行业发挥更加重要的作用,为实现工业自动化和智能制造提供有力支持。
A. 注塑成型技术的发展和应用现状随着科技的不断进步,注塑成型技术在工业生产中的应用越来越广泛。
注塑成型技术是一种通过将熔融塑料注入模具,经过冷却定型后取出成型品的工艺。
这种工艺具有生产效率高、成本低、产品精度高等优点,因此在汽车、电子、家电、医疗器械等领域得到了广泛的应用。
高精度注塑成型技术的发展。
为了满足产品的高精度要求,注塑成型技术不断进行技术创新,如采用高精度伺服电机驱动系统、精密导轨和测量装置等,以提高产品的尺寸精度和表面质量。
多材料注塑成型技术的研究。
为了满足不同材料的使用需求,研究人员不断探索新的注塑材料和工艺方法,如热塑性弹性体(TPE)、聚酰亚胺(PI)等新型材料的注塑成型技术。
机械手臂的通讯接口
机械手臂的通讯接口机械手臂被广泛应用于生产和制造行业,它可以帮助企业自动化生产流程,并降低劳动成本。
不同的机械手臂需要不同的通讯接口,以便与其他设备进行交互和控制。
本文将探讨机械手臂通讯接口的类型和应用。
通讯接口类型USB接口USB接口是一种通用的数字接口,大多数电脑和其他数字设备都支持。
机械手臂的USB接口通常用于连接计算机,以便上传和下载程序和数据。
然而,如果机械手臂需要与其他数字设备通信,那么其他类型的接口可能更合适。
RS232接口RS232接口是一种串行接口,通常用于控制和监控设备。
许多机械手臂都具有RS232接口,可以通过编程语言如C++和Python发送控制命令和接收反馈数据。
RS232接口的缺点是需要特殊的串行端口,而许多现代计算机不再具备这种类型的端口。
Ethernet接口Ethernet接口是一种用于局域网(LAN)通讯的标准接口。
使用Ethernet接口,机械手臂可以通过网络连接到其他设备,如计算机、PLC和其他机器人。
这种接口通常使用TCP/IP协议进行通讯,并提供高速数据传输和可靠性。
然而,安全性和数据保密性可能是使用Ethernet接口的主要缺点。
CAN接口CAN(控制器局域网)接口是一种常见的工业控制通讯协议,用于可编程控制器(PLC),机器人和其他工控设备。
CAN接口是一种高速、可靠的通讯协议,具有优异的噪声抑制性能。
许多机械手臂都具有CAN接口,以便连接到PLC和其他工控设备。
应用汽车制造机械手臂在汽车制造业中有广泛的应用。
它们可以用于安装和取下汽车轮胎、车身部件、安全气囊和其他重要零部件。
机械手臂通常需要使用网络通讯接口,以便连接到车间PLC和其他设备。
使用网络通讯接口可以实现自动化流程和生产线控制,并提高生产效率。
医疗器械制造机械手臂在医疗器械制造业中也有广泛的应用。
它们可以用于生产心脏起搏器、血压计和其他医疗器械。
机械手臂需要使用可靠的通讯接口,以便连接到其他设备和生产线。
机械手与注塑机连接点

机械手与注塑机连接点海天:C1=关模、C3=开模、B7=关模完+24V、B21=安全门+24V、B23=循环启动、38A/38B=开模完全力发:146=取出机关模控制、143=顶针退、142=复动开始、141=顶针进、243=安全门、242=关模完、240=开模完台意德:X00=安全门、X03=锁模完、X23=机械手合模、X24=机械手顶针、Y40=关模、Y46=开模、Y54=开模完海太:X000=安全门、X003=锁模完、X403=机械手连锁、X404=机械手顶针、Y030=关模、Y036=开模、Y434=开模完伊之密:X1-01=安全门+24V、X1-13=机械手连锁、X1-14=机械手顶针、X1-15=机械手取出完成、X3-03=锁模、X3-09=开模、X4-24=锁模终止+24V、X4-25=开模终止+24V、X4-26=全自动日本住友:A12/B12=关模、A13/B13=开模、A14/B14=顶针、A15/B15=循环启动、A1/B1=闭模完、A3/B3=全自动、A4/B4=开模完、A5/B5=安全门日本川口:63=顶针、65=循环启动、206=开模、214=关模、258=安全门、297=闭模完、298=全自动、299=开模完、1=0V、3=24V富强鑫双色机:40A/40B=开模完、35A/35B=安全门、34A/34B=关模完、X09=关模、X20=开模、X27=机械手使用、X46/47循环启动日本东洋:0/15=开模完、3/18=安全门、4/19=关模完、4/14=关模、6/16=开模、8/18=循环启动TMC:301=允许合模、302=允许顶进、303=允许顶退、306=机械手不使用、351=安全门、352=全自动、353=合模完、196=开模完、101=安全门、156=合模阀、159=开模阀、176=顶进阀、177=顶退阀SI Sunny 振强:Y120=开模完+26V、Y122=安全门+26V、Y123=全自动、X216=关模锁住、X217=开模锁住、X218=托模锁住、X219=完成信号、注:X216/217反相(有开模完此接点要通),、X219正相(有开模完此接点要断) 台中精机:001/001A=关模、002/002A=开模、012/012A=顶进、013/013A=顶退、032=允许机械手动作+0V、104=安全门、129=允许关模动作+24V申达:B06=关模终、B11=安全门、B22=循环启动、C1=关模、C3=开模、23A/23B=开模完日钢:15/16=安全门、09/10=开模完、05/06=闭模完、17/18=开模、21/22=关模、20/14=循环启动LG:X007=安全门+3、X014=开模、X015=关模、X016=顶针、X017=周期、Y213=开模完+14、Y214=全自动LG:X014=安全门+3、X025=闭模完+3、X030=开模、X040=关模、X042=顶针、X043=循环启动、Y107=全自动+20、Y123=开模完+20、注:20=110V震雄:100=安全门+24V、069=可取出+24V、070=用机械手(不用机械手时,此接点要通)、071=取出中、072=可以顶针、073=取出完成、038=开锁模震雄:00=安全门+401、18=机械手连线、19=成品、20=顶针、21=循环启动、105=开模、108=关模、123=开模完、注:19/21必须通断一次才能做全自动,18在不用机械手时必须常通震雄:00=安全门、32=机械手连线中、33=成品、34=顶针、35=循环启动、67=开锁模、86=开模完德马格:3=闭模+24V、4=顶针+24V、5=开模完+0V、8/9=安全门(如果这个点没用,用23/24代替)震德:OUT2=开模、OUT8 =关模、OUT18 =吹风(开模完)、IN2=安全门、IN12 =机械手连锁(循环启动)、IN13 =可顶针、IN14=取出完成力劲(红星电脑): OUT01 =关模、 OUT03 =开模、 OUT16 =开模完、 IN 11=完全门、 IN 22=循环启动力劲:Y108=关模、Y109 =开模、Y123 =完全门、X120=开模完、X216=允许关模、X=允许顶出、X=取出完成(循环启动)力劲:X09=安全门、X11=关模完、X16=机械手关模锁住、X17=机械手开模锁住、X18=机械手托模锁住、X19=机械手完成信号、Y08=关模、Y09=开模、Y20=开模完、Y22=全自动博创:I02=完全门、I12=可锁模、I13=可顶针、I14=循环启动、Y02=锁模、Y08=开模、Y21=开模完东华:X000=完全门、X023=循环启动、Y000=锁模、Y006=开模、Y014=开模完亿利达:X56=可顶针、X57=循环启动、X40=完全门、Y21=锁模、Y77=开模完。
第机械手与注塑机的连接
第机械手与注塑机的连接1、安装机械手前确认:因为国产和进口注塑机(欧洲除外)都自成一格,没有统一的规范,所以在装机械手前要对注塑机的固定安装与接线进行确认。
1.1.1注塑机与机械手安装确认:要求提供注塑机与机械手固定面的安装孔位及孔位尺寸,便于装机人员在装机前对制作固定机械手的过桥板;需要打孔的须提供注塑机固定板的安装平面尺寸;如注塑机固定板安装面为异型需提供图纸与照片。
1.1.2注塑机与机械手连线确认:要求提供注塑机的电路接线路图,便于装机人员在装机前对注塑机电路有所了解,提前拿出方案,并可查寻注塑机连线记录表,确保装机时快速无误的完成机械手连线。
2、连线时必须注意事项:安装机械手时必须先对注塑机电路的I/O点接线进行核对确认,并且关断注塑机控制电源,方可连线,连线完毕后必须再次确认,连线是否漏接、错接、短路的现象,然后再通电,并且能随时紧急断电。
3、富井注塑机专用机械手与注塑机主要连接信号:1)可开模联锁★★★2)可开模联锁★★★3)可关模联锁★★★4)可关模联锁★★★5)合模阀联锁★★★6)合模阀联锁★★★7)可顶出联锁★★★8)可顶出联锁★★★9)预留★10)预留★11)熔胶信号★★12)熔胶信号★★13)开模完成信号★★14)开模完成信号★★15)安全门关信号★★16)安全门关信号★★4、富井注塑机专用机械手信号分析4.1、注塑机专用机械手输入信号(由注塑机输出,先用万用表量出确实动作信号电压,然后关断注塑机电源,再与接线,并确认无误后在通电)4.1.1开模完信号:此信号为注塑机开模到底时注塑机才可输出,供给注塑机专用机械手之信号,为注塑机专用机械手可下行的开启信号。
当注塑机专用机械手在手动时,如无开模完信号,又强行按下行键,手臂不下行,且手控器显示报警。
在全自动时,如开模完无切换动作,手臂不下行取物。
4.1.2熔胶信号:此信号为注塑机熔胶时注塑机才可输出,供给注塑机专用机械手之信号,为注塑机专用机械手安全信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
注塑机机械手接口
接口简介
注塑机与机械手的接口是一种握手协议,协调注塑机与机械手的顺序动作。
接口定义了机械安装方式以及电气协议,目前国内用得比较多的公认标准是欧标12、欧标67,国内有许多注塑机制造商,但与机械手接口的电气协议各种各样。
.接口的机械部分
目前大部分注塑机都配有32芯的接口座,如图1所示,其尺寸大小都遵循统一的标准。
图2是欧标67接口的电气信号
欧标12的电气接口:
欧标67的电气接口比欧标12多了一个安全装置信号一个急停信号和一组抽芯信号,如下:
国内许多注塑机厂商的机械手接口信号一般只有几个信号,以下所示:
注塑机给机械手信号:急停、安全门、开模完成、自动状态。
机械手给注塑机信号:互锁、允许顶出、取出完成。
下面针对欧标12、欧标67的信号做说明:
先说电源,注塑机与机械手的信号是通过中间继电器传递的,它们的电源各自独立,这有助于提高各自的稳定
性。
信号是高电平有效还是低电平有效,欧标没规定,由注塑机和机械手制造商自己定义,欧标只定义中间继电器
的通断。
举个例子,如果某注塑机制造商需要定义“允许模关”为低电平有效,那么给32芯“注塑机电源”0V的电源,当机械手允许模关的时候,就闭合相应的中间继电器,就把17芯的信号拉至低电平。
同理如果需要高电平有效
就把注塑机的24VDC引到第32芯上。
关于急停信号以及安全装置信号,欧标67比欧标12分别多了一个信号,按照欧标机械手的工作区域需要围起来,以便安全,所以围栏上面需要安装一急停以及检查安全装置是否安全的电气开
关。
“模具区域”信号,机械手上有两个光电开关,用来监测机械手位置是否在模具区域,若在模具区域,注塑机
应该被禁止合模,这个信号与其它信号有点不一样,当不在模具区域的时候,机械手控制中间继电器闭合,如果注塑机定义高电平有效,那么对应的信号线就为高电平,当机械手进入模具区域,中间继电器断开,信号线变为低电平了。
“连接注塑机”信号,当需要使用机械手的时候,使能这个信号,那么注塑机就和机械手联锁动作,注塑机的开合模顶针以及抽芯动作受机械手控制,当关闭此信号,机械手和注塑机各自自由动作。
“瑕疵品”信号,当注塑机检测到当前的制品不符合质量要求,发信号给机械手,如果机械手打开处理瑕疵品的功能,那机械手会作出相应的处理。
“
开模到中间位置”和“允许完全开模”信号,这两个信号用在这种情况下:当客户需要开模到某个设定的位置后就允许机械手取制品。
分两种方式:1,开模到设定位置后注塑机发信号给机械手,注塑机继续开模,
机械手开始动作去取制品。
2,开模到设定位置后发信号给机械手,注塑机停止下来,机械手开始取制品,当取完
制品后,机械手发允许完全开模信号给注塑机,注塑机重新开模。
.信号测试
在使用机械手之前必须做如下检测:
1,开启“连接注塑机”信号,检查注塑机是否能开合模顶针抽芯动作,应该不能动作。
关闭此信号,注塑机应该能自由动作。
2,将机械手置于手动模式并将注塑机安全门打开,此时应出现“安全门开”信号,不能做任何动作,将安全门关上后此信息应消失。
3,手动模式下,机械手使能开合模,看注塑机能否开合模,当开合模完成后,看机械手界面是否出现开合模完
成。
同样方式检查顶针和抽芯。
4,手动模式下,不使能开合模,看注塑机能否开合模,应该不能开合模。
同样方式检查顶针和抽芯。
5,手动模式下,把机械手运动到模具区域,看能否做合模动作,应该不能合模。
.结束语
接口是注塑机与机械手沟通的语言,目前流行的公用接口语言是欧标12以及欧标67,注塑机制造商、机械手制造
商、用户若都能遵遵循这种语言,那么会给三者带来便捷。