艾尔发注塑机机械手说明方案
注塑机机械手安全操作及保养规程精选全文完整版
可编辑修改精选全文完整版注塑机机械手安全操作及保养规程注塑机机械手是一种自动化设备,可代替人工取料和放料,从而提高生产效率。
但同时也存在着一定的安全风险,如果操作不当,可能会导致工人受伤或设备损坏。
因此,为了确保生产安全和设备正常运行,注塑机机械手的操作和保养需要按照一定规程进行。
一、机械手操作规程1.1 人员要求注塑机机械手的操作需要专业工人进行。
在操作前需要确保工人已经接受过相关培训,熟悉机械手的结构和操作方法,掌握安全操作技能。
此外,在操作过程中需要严格遵循安全规程,坚决杜绝酒后操作或疲劳驾驶现象的出现。
1.2 操作前检查在操作前,需要对机械手进行全面的检查,确保各部件正常运行。
具体包括:•检查机械手的控制系统:确认是否有报警提示或错误信息。
•检查电器系统:检查电线和插头是否破损或老化。
•检查液压系统:检查液压油量和压力,确认是否正常。
•检查机械结构:检查机械手的承载能力和运动轨迹,确认是否符合安全要求。
1.3 操作流程在进行机械手操作时,需要按照以下流程进行:•打开主控制柜,并按照正常程序启动注塑机机械手。
•在保持距离的情况下,观察机械手的运动状态,确认是否有异常现象出现。
•如果需要进行手动调整,必须先停止机械手的运动,并等待其停稳后再开始调整。
•机械手的操作必须在加注塑机停止喷射过程后进行,以防止操作人员受伤。
1.4 安全要求在进行机械手操作时,需要遵守以下安全要求:•操作人员必须保持警觉,随时观察机械手的运动状态。
•禁止任何人员在机械手操作区域内停留或进入,以免造成危险。
•禁止在机械手上放置任何物品或采取不安全的操作方式,以防止机械手出现不正常的运动。
•在进行机械手操作时,必须佩戴防护用具,如手套、眼镜等。
二、机械手保养规程为了确保注塑机机械手的正常运行,需要定期进行保养和维护。
以下是机械手保养规程的详细介绍。
2.1 日常保养日常保养是机械手保养中最为基本的一种,目的在于减少机械手的故障率,延长机械手的使用寿命。
机械手说明书 (1)

5)机械手开机前必须确定无人在危险区域内;
6)任何不正确的操作有可能导致危险;
7)请注意机械手及周围的安全标示;
警告!
所有接触机械手的相关人员,必须详细了解使用手册。
警告!
对机械手应用的任何变更和修改,必须知会制造商。
警告!
任何违规的操作都有可能导致危险发生。
3.警告标示
7
7
8
空气消耗量(L/CYCLE)
2.2
2.4
2.6
电源
AC220V/±10% 50/60HZ
工作气压
4-8KGF/CM²
旋出角度
60º-90º
净重(KG)
35-47
36-48
37-49
注:W表示双截式,V表示真空
MODEL
A
B
C
D
E
F
G
H
I
J
K
L
M
N
P
Q
KA550
1350
1080
508
520
380
二.安装与搬运
1.安装尺寸
2.包装尺寸
3.拆箱后搬运
注意!
搬运过程中禁止人员在机械手下方作业
注意!
假如机械手需要重新安装或者移动,请告知代理商或者制造商.
注意!
机械手在出厂前已确认完好状态,请在运输及拆箱过程中务必小心谨慎,
如果发现有因运输过失造成损伤,请立即告知运输公司,封存受损件以备检查,
并申请赔偿.
自动按自动键,机械手进入自动操作状态,机械手进行循环执行。开模完信号一次变化开始全自动操作
教导在手动状态下按教导键,机械手进入教导模式,可以进行教导操作。
艾尔发注塑机机械手使用说明

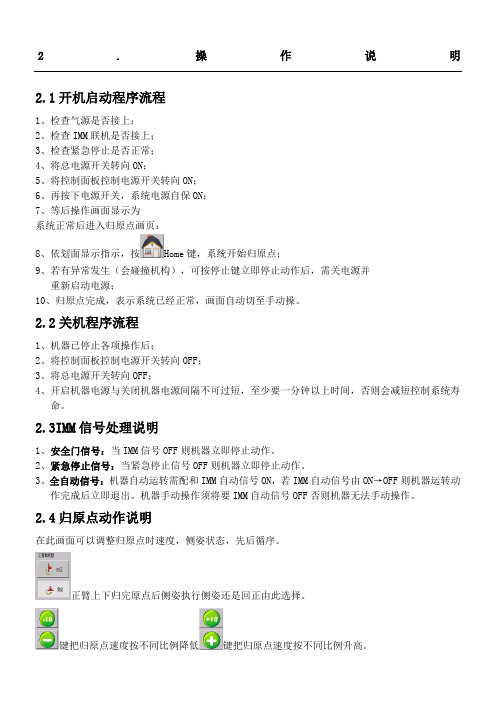
2.操作说明2.1 开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按Home 键,系统开始归原点;9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
2.2 关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。
2.3 IMM信号处理说明1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
2.4归原点动作说明在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
2.5手动操作说明2.5.1画面按键介绍画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页选择O点输出ON选择O点输出OFF各轴寸动操作。
操作过程中碰到极限开关勾选“馬達強制激磁”,按键,反方向操作轴寸动。
艾尔发注塑机机械手说明书

5高级应用及编程5.1系统设定在任意操作画面的下方菜单栏点击“系统”按钮进入如下操作画面在该画面中可以设置:1、警报设置a)警报静音(关):有异常报警时,蜂鸣器会响;b)警报静音(开):即使有异常报警时,蜂鸣器不会响。
2、横出方式设置a)横出警示(关):机械手正常横出;b)横出警示(开):机械手每次横出时发出警示,蜂鸣器响一次。
3、机械手状态设置a)机械手使用(关):机械手不使用;b)机械手使用(开):机械手处于使用状态。
4、Mx可合模的安全位置:引拔退回到该位置后才送允许关模,此功能是为防止类似有送模机的机台,关模时撞到机械手臂而设计的。
5、检知方式设定a)全程检知:机械手从开始取产品一直到产品放掉整个过程中都检测产品是否脱落,如果脱落则警报,机械手暂停。
b)模内检知:机械手只在从开始取物到其横出过安全门这段过程中对产品进行检测,如果产品脱落则警报;在安全门之外,不对产品进行检测。
c)不检知:机械手不检查是否取到产品。
6、禁区功能设置a)开:禁区中设置的参数有效,机械手运行必须在禁区参数设定范围内,否则警报。
b)关:禁区中设置的参数无效,其设置不影响机械手运行。
点击屏幕下方菜单栏中的按键“进阶操作”,进入下面页面1)全自动下可修改的距离范围机械手全自动运行时,能修改轴位置最大距离。
超过时给出提示。
2)机械手本体的IO延迟时间:侧姿,回正信号在O点动作过设定时间后没检到I点发警报。
3)横出轴的原点反相:若选中该项,则机械手归原点时Y轴会往Y+方向找原点。
4)使用模内下行待机功能:若选中该项,则需设置待机点坐标,每次循环都会先回到待机点位置。
5)安全门打开的处理方式a)安全门打开后立即停止:全自动运行时安全门打开后立即停止,后续不在执行,要重新启动运行。
b)安全门关闭后继续加工:全自动运行时安全门打开立即暂停,关门后机械手继续执行后面动作。
6)副臂使用方式:当勾选时,机械手具有相应机型的功能5轴副臂使用伺服;3轴副臂不使用;3轴副臂加汽缸。
艾尔发注塑机机械手说明方案
2.操作说明2.1开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按Home键,系统开始归原点;9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
2.2关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。
2.3IMM信号处理说明1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
2.4归原点动作说明在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
2.5手动操作说明2.5.1画面按键介绍画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页选择O点输出ON选择O点输出OFF各轴寸动操作。
操作过程中碰到极限开关勾选“马达强制激磁”,按键,反方向操作轴寸动。
寸动时轴运行速度快慢调整。
注塑机机械手说明书.docx
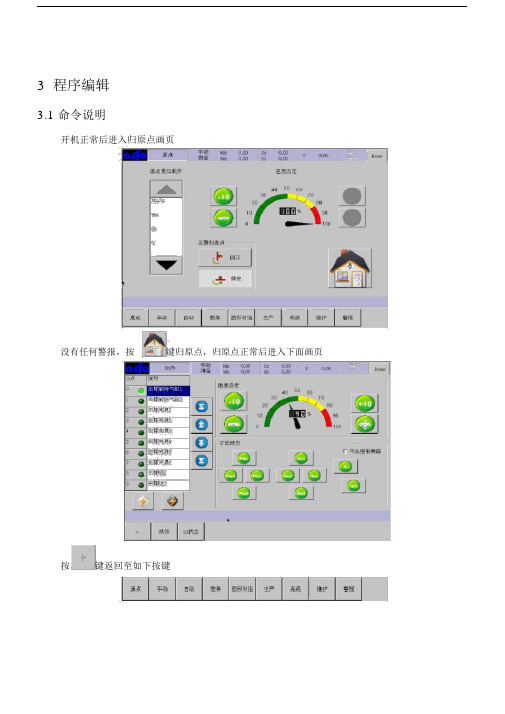
3程序编辑3.1 命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“ MX ”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
2)速度按键进入速度设定。
3)计时按键进入延时功能设定。
4)一般 I/O按键进入侧姿回正等选择。
5)成型 I/O按键进入成型相关条件设定。
6)治具 I/O按键进入治具相关功能设定。
7)周边 I/O按键进入周边相关功能设定。
8)回圈按键进入循环功能设定。
9)跳跃按键进入跳转功能设定。
10)停止按键进入程序完成设定。
11)宏按键进入调用已经编好的子程序。
编号为 0~99 共 100 个。
12)堆叠按键进入装箱取物功能设定。
编号为 0~3 共 4 个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面点击档案按钮进入如下画面在此页点击按钮,切换到如下画面点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
在此画面中可以根据模具产品功能需要,编辑各式程序。
下面进入正式教导阶段:2)速度按键进入如下画面点击空白框,弹出输入键盘,输入速度值,点击,输入完毕,返回以上画面,点击,进入如下画面此速度为在下一速度设定前直线运动时各轴的运动速度,如果以下程序中没有再设定其它速度,整个程序中轴运动都以此速度运行。
艾尔发注塑机械手说明书

5高级应用及编程5.1系统设定在任意操作画面的下方菜单栏点击“系统”按钮进入如下操作画面在该画面中可以设置:1、警报设置a)警报静音(关):有异常报警时,蜂鸣器会响;b)警报静音(开):即使有异常报警时,蜂鸣器不会响。
2、横出方式设置a)横出警示(关):机械手正常横出;b)横出警示(开):机械手每次横出时发出警示,蜂鸣器响一次。
3、机械手状态设置a)机械手使用(关):机械手不使用;b)机械手使用(开):机械手处于使用状态。
4、Mx可合模的安全位置:引拔退回到该位置后才送允许关模,此功能是为防止类似有送模机的机台,关模时撞到机械手臂而设计的。
5、检知方式设定a)全程检知:机械手从开始取产品一直到产品放掉整个过程中都检测产品是否脱落,如果脱落则警报,机械手暂停。
b)模内检知:机械手只在从开始取物到其横出过安全门这段过程中对产品进行检测,如果产品脱落则警报;在安全门之外,不对产品进行检测。
c)不检知:机械手不检查是否取到产品。
6、禁区功能设置a)开:禁区中设置的参数有效,机械手运行必须在禁区参数设定范围内,否则警报。
b)关:禁区中设置的参数无效,其设置不影响机械手运行。
点击屏幕下方菜单栏中的按键“进阶操作”,进入下面页面1)全自动下可修改的距离范围机械手全自动运行时,能修改轴位置最大距离。
超过时给出提示。
2)机械手本体的IO延迟时间:侧姿,回正信号在O点动作过设定时间后没检到I点发警报。
3)横出轴的原点反相:若选中该项,则机械手归原点时Y轴会往Y+方向找原点。
4)使用模内下行待机功能:若选中该项,则需设置待机点坐标,每次循环都会先回到待机点位置。
5)安全门打开的处理方式a)安全门打开后立即停止:全自动运行时安全门打开后立即停止,后续不在执行,要重新启动运行。
b)安全门关闭后继续加工:全自动运行时安全门打开立即暂停,关门后机械手继续执行后面动作。
6)副臂使用方式:当勾选时,机械手具有相应机型的功能5轴副臂使用伺服;3轴副臂不使用;3轴副臂加汽缸。
注塑机机械手编程操作方法【要领】
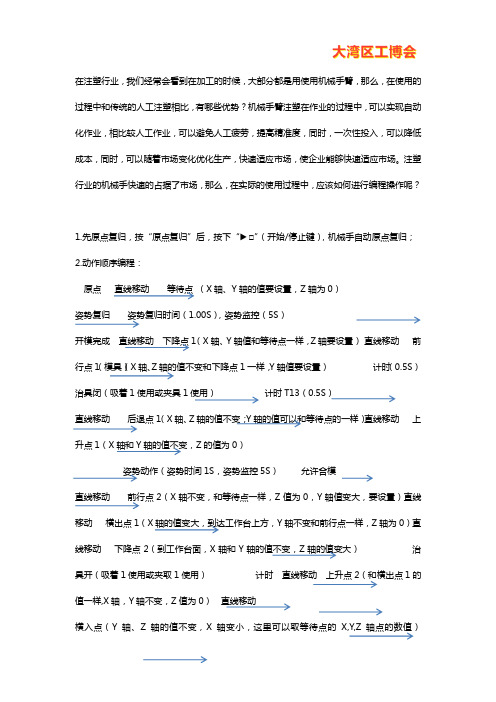
在注塑行业,我们经常会看到在加工的时候,大部分都是用使用机械手臂,那么,在使用的过程中和传统的人工注塑相比,有哪些优势?机械手臂注塑在作业的过程中,可以实现自动化作业,相比较人工作业,可以避免人工疲劳,提高精准度,同时,一次性投入,可以降低成本,同时,可以随着市场变化优化生产,快速适应市场,使企业能够快速适应市场。
注塑行业的机械手快速的占据了市场,那么,在实际的使用过程中,应该如何进行编程操作呢?1.先原点复归,按“原点复归”后,按下“▶□”(开始/停止键),机械手自动原点复归;2.动作顺序编程:原点直线移动等待点(X轴、Y轴的值要设置,Z轴为0)姿势复归姿势复归时间(1.00S),姿势监控(5S)开模完成直线移动下降点1(X轴、Y轴值和等待点一样,Z轴要设置)直线移动前行点1(模具)(X轴、Z轴的值不变和下降点1一样,Y轴值要设置)计时(0.5S)治具闭(吸着1使用或夹具1使用)计时T13(0.5S)直线移动后退点1(X轴、Z轴的值不变;Y轴的值可以和等待点的一样)直线移动上升点1(X轴和Y轴的值不变,Z的值为0)姿势动作(姿势时间1S,姿势监控5S)允许合模直线移动前行点2(X轴不变,和等待点一样,Z值为0,Y轴值变大,要设置)直线移动横出点1(X轴的值变大,到达工作台上方,Y轴不变和前行点一样,Z轴为0)直线移动下降点2(到工作台面,X轴和Y轴的值不变,Z轴的值变大)治具开(吸着1使用或夹取1使用)计时直线移动上升点2(和横出点1的值一样,X轴,Y轴不变,Z值为0)直线移动横入点(Y轴、Z轴的值不变,X轴变小,这里可以取等待点的X,Y,Z轴点的数值)返回3.设置要领3.1 原点复归3.2等待点(最好是在开模后动、定模之间距离的一半的上方,以不挂到零件为好,这里X 值、Y值都设置[X1,Y1],Z值为[Z1=0])3.3 姿势复归(不用设置)3.4 开模完成3.5下降点1(下降高度以能吸住零件为准,X、Y值和等待点一样[X2=X1,Y2=Y1],Z值要设置[Z2])3.6前行点1(X轴值X3=X1,Z轴值Z3=Z2,Y轴的值要设置[Y3])3.7 计时(0.5S),主要防止吸不住零件;3.8治具闭(选择吸着1使用或者夹取1使用)3.9计时T13(0.5S)3.10 后退点1(X轴值X4=X2=X1,Y轴值Y4=Y2,Z轴值Z4=Z2)3.11 上升点1(X轴值X5=X1,Y5=Y1,Z5=Z1=0)3.12 姿势动作3.13 允许合模3.14 前行点2(X轴值X6=X1,Z轴值Z6=Z1=0,Y轴值[Y6]要设置)3.15 横出点(X轴值要设置[X7],Y轴值Y7=Y6,Z轴值Z7=Z1=0)3.16 下降点2(X轴值X8=X7,Y轴值Y8=Y7=Y6,Z轴值要设置[Z8])3.17 治具开(选择吸着1使用或者夹取1使用)3.18 上升点2(X轴值X9=X8=X7,Y轴值Y9=Y8=Y7=Y6,Z轴值Z9=Z1=0)3.19 横入点=前行点2(X轴值X10=X6=X1,Y轴值Y10=Y6,Z轴值Z10=Z1=0)3.20 返回Y轴X轴Z轴在注塑过程中使用机械手有哪些好处呢?节省人力、时间、资金:采用机取件代替人工取件,大幅度削减所需的劳动力,且根据实际情况,可实现一人多机制,一定程度上节省了人力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.操作说明
2.1开机启动程序流程
1、检查气源是否接上;
2、检查IMM联机是否接上;
3、检查紧急停止是否正常;
4、将总电源开关转向ON;
5、将控制面板控制电源开关转向ON;
6、再按下电源开关,系统电源自保ON;
7、等后操作画面显示为
系统正常后进入归原点画页:
8、依划面显示指示,按Home键,系统开始归原点;
9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并
重新启动电源;
10、归原点完成,表示系统已经正常,画面自动切至手动操。
2.2关机程序流程
1、机器已停止各项操作后;
2、将控制面板控制电源开关转向OFF;
3、将总电源开关转向OFF;
4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿
命。
2.3IMM信号处理说明
1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动
作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
2.4归原点动作说明
在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
2.5手动操作说明
2.5.1画面按键介绍
画页切换到顶页
画页切换到上一页
画页切换到下一页
画页切换到末页
选择O点输出ON
选择O点输出OFF
各轴寸动操作。
操作过程中碰到极限开关勾选“马达强制激磁”,按键,反方向操作轴寸动。
寸动时轴运行速度快慢调整。
光标移到要输出的选项,点击输出。
在选择主臂旋转气缸时点击输出,它不受Z轴位置控制,在任何位置都可以动作,教导时在模内不能旋转。
按IO状态键进入IO点观查。
在此状态区按键返回。
2.6自动操作说明
按“自动”键进入下面画页。
按键说明:
全自动运转
自动运行时此程序主运行速度调整。
停止。
运行时有开模完信号,按此键运行这个循环完后停止。
在等候开模时,按此键立即停止。
在运行过程中,若发现危险时,请立即按操作器上红色紧急停止按键。
自动运行时相关参数调整:
把光标移到要修改位置,出现右边修改栏,点击出现如下画页
输入想要值点“确定”按键
自动运行时轴位置微调:
把光标移到要修改位置,出现右边修改栏,更改要变更字段值后按键。
按“周期监视”键出现如下画页:
在此画页可以看自动运行机器相关参数。
取出时间:开模完信号有开始计时,到手臂取物完成到上位的时间。
取出循环时间:机械手完成一个循环所用时间。
全自动启动时间:此次开机时间。
累计运行时间:机器运行到现在的总时间。
全自动循环次数:本次开机自动运行次数。
累计循环次数:机器运行到现在全自动的总次数。
设定循环次数:如设定为100,全自动循环次数到达100时,机械手每做一个循环就发出警报。
为0次功能无效。
设定放弃次数:设定此值为10,全自动运行时前10模放到不良品位置。
为0次功能无效。
取样检查次数:设定此值为100,全自动运行时每隔100模放一模产品到品检位置。
为0次功能无效。
手动取样:按“+”键数值加一,如为1,把当前产品到品检位置。
为0次功能无效。
自动IO状态
I点状态
O点状态
通过显示看输入输出状态。
2.7生产管理
看生产相关信息,此模具生产良品数,成品数可以清零。
可以设定输送带每隔多少模动一次,每次运行多长时间。
按“系统”键进入下面操作画面。
在此画页中可以设定:
警报静音开或关,若关发生警报时蜂鸣器不响。
横出警示开或关,若开机械手横出时发出警报声。
给操作者提示,要注意安全。
机械手使用开或关,机械手与成型机配合使用时要用开。
运行过程中产品掉落检查:
全程检查,在运行这个循环内,没放产品之前,若产品掉落,发出警报并停
止运行。
模内检查,在模内运行时若产品掉落,发出警报并停止运行。
不检查,在整个循环中若产品掉落,不发出警报。
禁区功能:
开当选择开时,在运行时运行位置不在禁区范围内时,会发出警报。
(自动运行时一定要开) 关运行位置不受禁区范围影响。