瓦力智能工业机器人(山洋)电气原理图明
一文教会你电气图与电气控制电路图,学工业机器人必收藏

一文教会你电气图与电气控制电路图,学工业机器人必收藏一、看电气图的一般步骤1、详看图纸说明拿到图纸后,首先要仔细阅读图纸的主标题栏和有关说明,如图纸目录、技术说明、电器元件明细表、施工说明书等,结合已有的电工知识,对该电气图的类型、性质、作用有一个明确的认识,从整体上理解图纸的概况和所要表述的重点。
2、看概略图和框图由于概略图和框图只是概略表示系统或分系统的基本组成、相互关系及其主要特征,因此紧接着就要详细看电路图,才能搞清它们的工作原理。
概略图和框图多采用单线图,只有某些380/220V低压配电系统概略图才部分地采用多线图表示。
3、看电路图是看图的重点和难点电路图是电气图的核心,也是内容最丰富、最难读懂的电气图纸。
看电路图首先要看有哪些图形符号和文字符号,了解电路图各组成部分的作用、分清主电路和辅助电路,交流回路和直流回路。
其次,按照先看主电路,再看辅助电路的顺序进行看图。
看主电路时,通常要从下往上看,即先从用电设备开始,经控制电器元件,顺次往电源端看。
看辅助电路时,则自上而下、从左至右看,即先看主电源,再顺次看各条支路,分析各条支路电器元件的工作情况及其对主电路的控制关系,注意电气与机械机构的连接关系。
通过看主电路,要搞清负载是怎样取得电源的,电源线都经过哪些电器元件到达负载和为什么要通过这些电器元件。
通过看辅助电路,则应搞清辅助电路的构成,各电器元件之间的相互联系和控制关系及其动作情况等。
同时还要了解辅助电路和主电路之间的相互关系,进而搞清楚整个电路的工作原理和来龙去脉。
4、电路图与接线图对照起来看接线图和电路图互相对照看图,可帮助看清楚接线图。
读接线图时,要根据端子标志、回路标号从电源端顺次查下去,搞清楚线路走向和电路的连接方法,搞清每条支路是怎样通过各个电器元件构成闭合回路的。
配电盘(屏)内、外电路相互连接必须通过接线端子板。
一般来说,配电盘内有几号线,端子板上就有几号线的接点,外部电路的几号线只要在端子板的同号接点上接出即可。
机器人电气图纸

Place + Page
001
002
0012
0013
0014
0015
0021
0022
0011
0031
0031
0031
0031
0031
0041
0051
0051
0051
0051
0051
0094
0097
0098
AC
1
AC
2
AC
3
AC
10
AC
22
AC
26
AC
ቤተ መጻሕፍቲ ባይዱ27
AC
28
AC
29
AC
30
AC
31
AC
32
AC
33
AC
34
AC
35
AC
36
AC
37
Latest revision:
Prepared by, date:
Page type
Title page/cover sheet Title page/cover sheet Table of contents Table of contents Table of contents Table of contents Title page/cover sheet Title page/cover sheet Table of contents Device list Device list Device list Device list Device list Device list Parts list Parts list Parts list Parts list Parts list Title page/cover sheet Title page/cover sheet Title page/cover sheet Schematic Schematic Schematic Schematic Schematic Schematic Schematic Schematic Schematic Schematic Schematic Schematic Schematic Schematic Schematic Schematic Schematic
实验名称:乐高EV3智能机器人模拟火力发电原理

实验名称:乐高EV3智能机器人模拟火力发电原理实验目的:利用乐高EV3简易拼装,通过EV3智能机器人相匹配的编程系统进行编程模拟火力发电原理一、实验仪器及试剂:乐高EV3智能机器人二、实验仪器装置图(无论用手绘或电脑画都必须清晰)及仪器的组装说:适应于讲解,最后整体运行使学生可以更好的理解火力发电的过程。
使死板的甚至有点神秘色彩的火力发电过程变得让人简单易懂,使火力发电过程更加的生动的展现在学生面前。
1-运煤车 2-锅炉 3-冷凝器 4-涡轮机 5-发电机 6-用电器 7-工人利用乐高EV3零件进行简易拼装,根据火力发电站内部结构依次拼装出锅炉、汽轮机、发电机、冷凝器以及冷凝水回流系统,分部拼装完毕后进行总体的组装,构成一套完整的火力发电站模拟系统。
然后通过与EV3智能机器人相匹配的编程系统进行编程,由程序控制各步的操作。
三、实验操作:将乐高EV3零件简易拼装好的火力发电站的出锅炉、汽轮机、发电机、冷凝器以及冷凝水回流系统进行总体的组装,构成一套完整的火力发电站模拟系统。
然后通过事先编程好的EV3智能机器人进行各步演示。
锅炉灯亮表示化石燃料燃烧,从煤中的化学能开始一系列的能量转化过程。
分部分运行使这套火力发电站模拟系统能更好的适应于讲解,最后整体运行使我们可以更好的理解火力发电的过程。
四、创新(改进)的意义:上图为人教版必修2火电站工作原理示意图,这幅图经久不变。
教师发挥优势特长为学生创造良好的学习条件。
大胆尝试利用EV3零件进行简易拼装,根据火力发电站内部结构依次拼装出锅炉、汽轮机、发电机、冷凝器以及冷凝水回流系统,分部拼装完毕后进行总体的组装,构成一套完整的火力发电站模拟系统。
然后通过与EV3智能机器人相匹配的编程系统进行编程模拟火力发电的能量转化过程。
使一套活生生的火力发电装置展现在学生面前,让学生真真切切的感受火力发电中能量是如何转化的。
这一模拟装置也体现了新理念下,教师各种综合能力的提升,尽可能多的为学生的学习服务。
工业机器人原理及应用实例.doc

工业机器人原理及应用实例一、工业机器人概念通信方式传送到机器人控制柜。
工业机器人是一种可以搬运物料、示教输入型的示教方法有两种:一零件、工具或完成多种操作功能的专用种是由操作者用手动控制器(示教操纵机械装置;由计算机控制,是无人参与盒),将指令信号传给驱动系统,使执的自主自动化控制系统;他是可编程、行机构按要求的动作顺序和运动轨迹具有柔性的自动化系统,可以允许进行操演一遍;另一种是由操作者直接领动人机联系。
可以通俗的理解为“机器人执行机构,按要求的动作顺序和运动轨是技术系统的一种类别,它能以其动作迹操演一遍。
在示教过程的同时,工作复现人的动作和职能;它与传统的自动程序的信息即自动存入程序存储器中机的区别在于有更大的万能性和多目在机器人自动工作时,控制系统从程序的用途,可以反复调整以执行不同的功存储器中检出相应信息,将指令信号传能。
”给驱动机构,使执行机构再现示教的各二、组成结构种动作。
示教输入程序的工业机器人称工业机器人由主体、驱动系统和控为示教再现型工业机器人。
制系统三个基本部分组成。
主体即机座具有触觉、力觉或简单的视觉的工和执行机构,包括臂部、腕部和手部,业机器人,能在较为复杂的环境下工作;有的机器人还有行走机构。
大多数工业如具有识别功能或更进一步增加自适机器人有3~6个运动自由度,其中腕应、自学习功能,即成为智能型工业机部通常有1~3个运动自由度;驱动系器人。
它能按照人给的“宏指令”自选统包括动力装置和传动机构,用以使执或自编程序去适应环境,并自动完成更行机构产生相应的动作;控制系统是按为复杂的工作。
照输入的程序对驱动系统和执行机构四、主要特点发出指令信号,并进行控制。
工业机器人最显著的特点有以下三、分类几个:工业机器人按臂部的运动形式分(1)可编程。
生产自动化的进一步发为四种。
直角坐标型的臂部可沿三个直展是柔性启动化。
工业机器人可随其工角坐标移动;圆柱坐标型的臂部可作升作环境变化的需要而再编程,因此它在降、回转和伸缩动作;球坐标型的臂部小批量多品种具有均衡高效率的柔性能回转、俯仰和伸缩;关节型的臂部有制造过程中能发挥很好的功用,是柔性多个转动关节。
工业机器人工作原理及其基本构成
工业机器人工作原理及其基本构成工业机器人工作原理现在广泛应用的焊接机器人都属于第一代工业机器人,它的基本工作原理是示教再现。
示教也称导引,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数\工艺参数等,并自动生成一个连续执行全部操作的程序。
完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。
这就是示教与再现。
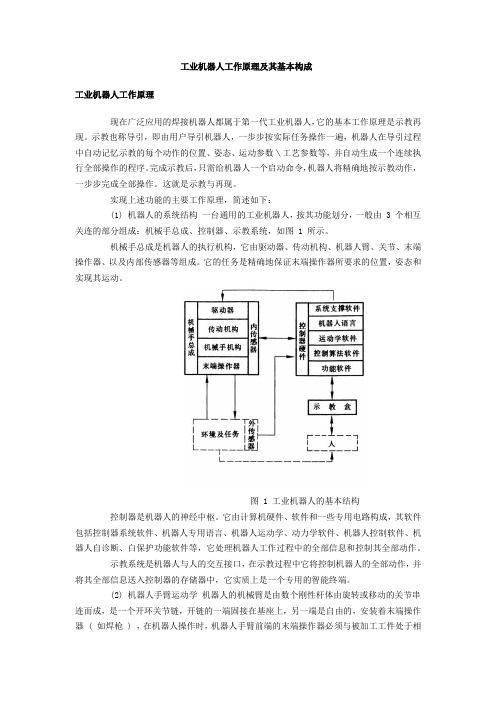
实现上述功能的主要工作原理,简述如下:(1) 机器人的系统结构一台通用的工业机器人,按其功能划分,一般由 3 个相互关连的部分组成:机械手总成、控制器、示教系统,如图 1 所示。
机械手总成是机器人的执行机构,它由驱动器、传动机构、机器人臂、关节、末端操作器、以及内部传感器等组成。
它的任务是精确地保证末端操作器所要求的位置,姿态和实现其运动。
图 1 工业机器人的基本结构控制器是机器人的神经中枢。
它由计算机硬件、软件和一些专用电路构成,其软件包括控制器系统软件、机器人专用语言、机器人运动学、动力学软件、机器人控制软件、机器人自诊断、白保护功能软件等,它处理机器人工作过程中的全部信息和控制其全部动作。
示教系统是机器人与人的交互接口,在示教过程中它将控制机器人的全部动作,并将其全部信息送入控制器的存储器中,它实质上是一个专用的智能终端。
(2) 机器人手臂运动学机器人的机械臂是由数个刚性杆体由旋转或移动的关节串连而成,是一个开环关节链,开链的一端固接在基座上,另一端是自由的,安装着末端操作器 ( 如焊枪 ) ,在机器人操作时,机器人手臂前端的末端操作器必须与被加工工件处于相适应的位置和姿态,而这些位置和姿态是由若干个臂关节的运动所合成的。
因此,机器人运动控制中,必须要知道机械臂各关节变量空间和末端操作器的位置和姿态之间的关系,这就是机器人运动学模型。
一台机器人机械臂几何结构确定后,其运动学模型即可确定,这是机器人运动控制的基础。
瓦力工业机器人电气BOM表

VP603
标记 处数
本体电气元件BOM表
共 2 第 2 页
更改单号
签名
日
期
更改 序号 1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 编 号 名称
顶部出线上壳 开孔安装下壳 公插体 母插体 D行冷压针 D行冷压针 D行冷压针 D行冷压针 金属电缆接头
拟订 审核 批准 型号/规格
H16B-THE-PG21 H16B-BK-2L HD-040-MC HD-040-FC DCSM-1.5 CDSF-1.5 CDSM-0.5 CDSF-0.5
单位
PCS PCS PCS PCS PCS PCS PCS PCS PCS PCS
数量
2 2 2 2 40 40 40 40
CDSF-1.5
CDSM-0.5
CDSF-0.5
WNA-PG21 ER3VLY
唯恩 电池东芝电器营销株式 会社
电池 6芯航空插 9芯航空插
套 套
2 6 6 6
WNA-PG21 ER3VLY
计
共 2
划
页
单
第
号
2 页
东莞瓦力智能科 技有限公司
日期 日期 日期
型号/规格
唯恩 唯恩 唯恩 唯恩 唯恩 唯恩 唯恩 唯恩
备注
H16B-THE-PG21
H16B-BK-2L
HD-040-MC
HD-040-FC
DCSM-1.5
工业机器人内部结构及基本组成原理详解
工业机器人内部结构及基本组成原理详解工业机器人详解你对工业机器人有着什么样的了解?关于工业机器人,我们过去也反反复复推送了很多的文章,在这一次,我们将尝试解决有关---在工业环境中使用的最常见的机器人和作业时经常会遇到的问题。
关于工业机器人定义什么可以被认为是一个工业机器人?什么不能被称为工业机器人?工业机器人直到最近才能避开这种混乱。
不是在工业环境中使用的每个机电设备都可以被认为是机器人。
根据国际标准组织的定义,工业机器人是一种可编程的三自由度或多轴自动控制的可编程多用途机械手。
这几乎是在谈论工业机器人时被接受的定义。
工业机器人自中年以来发生了什么变化?越来越多的工程师和企业家正在寻找越来越多的机器人技术,帮助在工业环境中优化工作流程的方式。
随着时代的发展和机器人技术的进步,机器人手臂必须为诸如仓储中使用的群组AGV等新手铺路。
我们经常说典型的工业机器人由工具,工业机器人手臂,控制柜,控制面板,示教器以及其他外围设备组成。
那么这些是什么?这些部分通常都在一起,控制柜类似于机器人的大脑。
控制面板和示教器构成用户环境。
工具(也称为末端执行器)是为特定任务设计的设备(例如焊接或喷涂)。
机器人手臂基本上是移动工具的东西。
但并不是每个工业机器人都像一个手臂。
不同机器人有不同类型的结构。
控制面板---操作员使用控制面板来执行一些常规任务。
(例如:改变程序或控制外围设备)。
应用“机器人工人”----什么时候应该使用工业机器人而不是人工?相信这个问题大家思考的次数并不少了。
理想情况下,这应该是双赢的。
想快速看到效果,你需要知道什么是别人最不喜欢的工作。
想得最多的是那些重复的,乏味的工作,需要从工作人员那边进行大量单调的行动,这个思考是正确的,因为正是如此,例如从一个输送机到另一个输送机。
如果总是相同的任务,您可以使用专门针对您的需求量身定制的自动化解决方案。
工厂的工作处理需要越来越灵活,在这些情况下,正确的解决方案是:可以试用用于不同任务的可重新编程的机器人进行任务操作。
通俗理解电机原理

入门通俗理解电机原理附各种电机原理图1821年,法拉第制作了一个装置,这个装置能将电能转化成机械能,被认为是世界上第一台电动机。
法拉第的装置组成非常简单:将水银注入一个圆形容器里面,中间放置一块永磁体,一根长的导线一端悬挂,另一端浸入容器里的水银里面,最后再外接一个直流电源。
原理也很简单,永磁体产生的磁场与导线产生的磁场相互作用,产生一个使导线绕轴旋转的力。
法拉第的天才之处在于想到了用水银(常温液体,有良好的导电性)解决了电机连续旋转的所需要的换向问题。
法拉第的电机验证了机电能量转换可以连续进行的,为电机的发展奠定了坚实的基础。
当然现代电机和法拉第的电机模型有了较大的区别,但原理都是完全一致的:都是两个磁场相互作用。
我们从小学就知道,磁铁分N极和S极,磁力线从N极出发,最后回到S极;磁铁同极相斥,异极相吸。
磁铁磁极之间的相互作用示意图如下:利用磁极之间的相互作用力,理论上我们可以移动一个磁极,让另外一个磁极跟着运动,如果第一个磁极旋转的话,另一个磁极也会跟着旋转。
但是这样无法称之为电机,因为旋转一个磁极需要的是机械能,这样本质上是机械能之间的转换,不是电能和机械能之间的转换。
那怎么办呢?安培定律告诉我们,磁场本质是由电流产生的,我们想要的是磁场之间的相互作用,因此主要有电流即可,一个很自然的想法就是:能不能将两个磁场中的一个用线圈来产生呢?——当然可以,永磁同步电机就是这么干的,具体见下图:我们一般将永磁体放在转子上,定子是一个线圈,线圈通电后,也会产生一个磁场。
根据我们的直观感觉,很容易得出如下结论:当两个磁场轴线正对着的时候(上图左),磁场之间有相互吸引力,这个力是径向的,不会产生转矩。
当两个磁场轴线有一定夹角的时候(上图中),磁场之间有相互吸引力,但是这个力既有径向分量,也有切向分量,因此会产生一定的转矩。
当两个磁场轴线垂直的时候(上图右),磁场之间有相互吸引力,但是这个力主要是切向分量,因此产生转矩最大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Hale Waihona Puke 工程图明细表页次: 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 VP603-1220 22 23 24 25 VP603-1221 6号电机接线表 VP603-1222 门板安装版原件布置图 VP603-1223 刹车电阻与风扇接线图 VP603-1224 蓝图编号 VP603-1201 VP603-1202 VP603-1203 VP603-1204 VP603-1205 VP603-1206 VP603-1207 VP603-1208 VP603-1209 VP603-1210 VP603-1211 VP603-1212 山洋马达机器人本体航空插接线图 VP603-1213 山洋马达机器人本体航空插接线图 VP603-1213 山洋驱动器串口通信原理图 VP603-1214 电池电压低报警及刹车模块端子排及接线图 VP603-1215 VP603-1216 VP603-1217 VP603-1218 VP603-1219 2号电机接线表 3号电机接线表 4号电机接线表 5号电机接线表 A720-5CA 门板电安装板组件布局图 1号电机接线表 名 电控箱(山洋驱动器)整体布局图 主电路原理图 山洋驱动器控制原理图 急停控制原理图 轴卡与1﹑2轴驱动器CN1信号原理图 轴卡与3﹑4轴驱动器CN1信号原理图 轴卡与5﹑6轴驱动器CN1信号原理图 EDIO-S003输入端控制原理图 EDIO-S003输出端控制原理图 EDIO-S003端子接线原理图 A720-5CA EDIO-S003输出端控制原理图 示教器接线原理图 称 版本 A A A A A A A A A A A A A B A A A A A A A A A A A 日期 备 注
JMU0002-02